

Лекции 23.pptx
- Количество слайдов: 8
 Метод перемещений является таким же универсальным методом, как и метод сил, и может быть применен для расчета любых статически неопределимых систем. В отличие от метода сил в методе перемещений за неизвестные принимаются угловые и линейные перемещения узлов рамы и на основании их найденных значений определяются усилия в основных элементах. Основные предпосылки метода: методе в как ипренебрегают продольных сил, 1) влиянием поперечных и сил на перемещения узлов рамы, учитывают влияние только изгибающих моментов; 2) из-за малости деформаций изгиба, пренебрегают изменением длин стержней за счет искривления их осей; 3) в общем случае нагрузки узлы рамы могут поворачиваться и линейно смещаться. Считается, что при повороте жесткого узла все примыкающие элементы поворачиваются на один и тот же угол. Элементы, сходящиеся в шарнирном узле, поворачиваются каждый на свой угол, в связи с чем угол поворота шарнирного узла определить не удается (см. «а» ); 4) линейные перемещения узлов происходят по дуге окружности, но ввиду их малости считают, что перемещения узлов происходят перпендикулярно к элементу, которому они принадлежат. а) б)
Метод перемещений является таким же универсальным методом, как и метод сил, и может быть применен для расчета любых статически неопределимых систем. В отличие от метода сил в методе перемещений за неизвестные принимаются угловые и линейные перемещения узлов рамы и на основании их найденных значений определяются усилия в основных элементах. Основные предпосылки метода: методе в как ипренебрегают продольных сил, 1) влиянием поперечных и сил на перемещения узлов рамы, учитывают влияние только изгибающих моментов; 2) из-за малости деформаций изгиба, пренебрегают изменением длин стержней за счет искривления их осей; 3) в общем случае нагрузки узлы рамы могут поворачиваться и линейно смещаться. Считается, что при повороте жесткого узла все примыкающие элементы поворачиваются на один и тот же угол. Элементы, сходящиеся в шарнирном узле, поворачиваются каждый на свой угол, в связи с чем угол поворота шарнирного узла определить не удается (см. «а» ); 4) линейные перемещения узлов происходят по дуге окружности, но ввиду их малости считают, что перемещения узлов происходят перпендикулярно к элементу, которому они принадлежат. а) б)
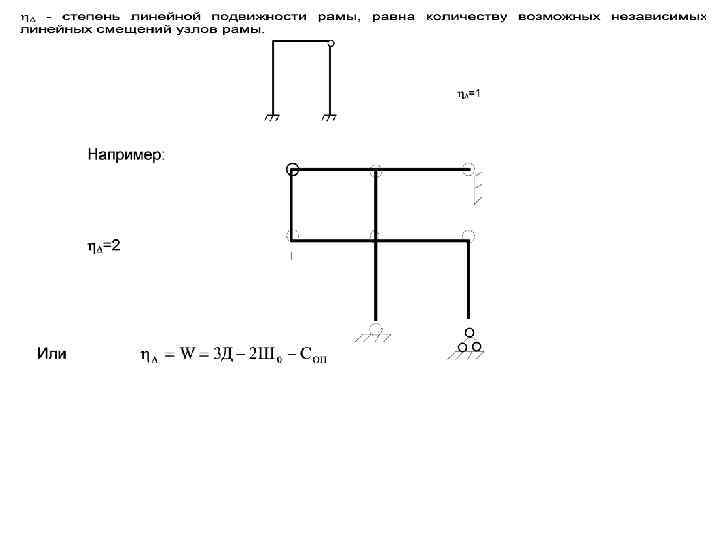
 Степенью кинематической неопределимости называется число неизвестных перемещений, знание") Степень кинематической неопределимости рам (количество неизвестных) Степенью кинематической неопределимости называется число неизвестных перемещений, знание которых определяет деформированный вид системы и, следовательно, все усилия в ней. Учитывая сказанное, степень кинематической неопределимости рамы определяется: здесь: - степень угловой подвижности рамы. Она определяется числом жестких узлов рамы, не считая опорных, т. к. их положение заранее известно. Жестким считается узел, в котором, по крайней мере, два из сходящихся стержней соединены между собой жестко.
Степень кинематической неопределимости рам (количество неизвестных) Степенью кинематической неопределимости называется число неизвестных перемещений, знание которых определяет деформированный вид системы и, следовательно, все усилия в ней. Учитывая сказанное, степень кинематической неопределимости рамы определяется: здесь: - степень угловой подвижности рамы. Она определяется числом жестких узлов рамы, не считая опорных, т. к. их положение заранее известно. Жестким считается узел, в котором, по крайней мере, два из сходящихся стержней соединены между собой жестко.
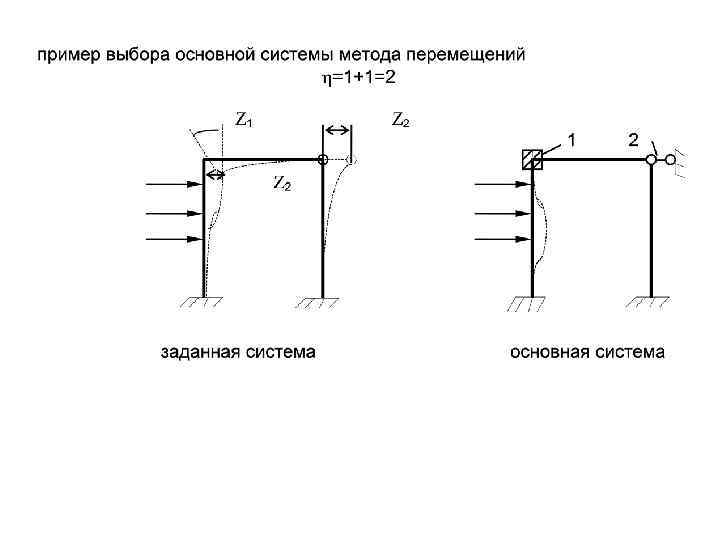
 Основная система метода перемещений После определения числа неизвестных, выбирают основную систему метода перемещений. В отличие от метода сил, где основную систему выбирают статически определимой, в методе перемещений в качестве основной системы принимается кинематически определимая система, которая образуется из заданной путем наложения на ее узлы связей, препятствующих упругим перемещениям узлов. Вводятся связи двух типов: а) связи первого рода или упруго-податливые защемления, которые не дают узлам возможности поворачиваться, но не препятствуют возможным их линейным смещениям (моментные связи). Связи первого рода вводятся во все жесткие узлы рамы. б) связи второго рода или опорные стержни, которые не мешают повороту узлов, но исключают их возможные линейные смещения. Вводят связи второго рода по направлению возможных линейных перемещений узлов. Т. о. , после постановки связей сформированная основная система представляет собой набор отдельных статически неопределимых балок с постоянной жесткостью.
Основная система метода перемещений После определения числа неизвестных, выбирают основную систему метода перемещений. В отличие от метода сил, где основную систему выбирают статически определимой, в методе перемещений в качестве основной системы принимается кинематически определимая система, которая образуется из заданной путем наложения на ее узлы связей, препятствующих упругим перемещениям узлов. Вводятся связи двух типов: а) связи первого рода или упруго-податливые защемления, которые не дают узлам возможности поворачиваться, но не препятствуют возможным их линейным смещениям (моментные связи). Связи первого рода вводятся во все жесткие узлы рамы. б) связи второго рода или опорные стержни, которые не мешают повороту узлов, но исключают их возможные линейные смещения. Вводят связи второго рода по направлению возможных линейных перемещений узлов. Т. о. , после постановки связей сформированная основная система представляет собой набор отдельных статически неопределимых балок с постоянной жесткостью.
 Система канонических уравнений метода перемещений Идея метода заключается в том, что: для того, чтобы основная и заданная система были равноценны в смысле деформаций и усилий, необходимо в основной системе связи повернуть на углы и придать им линейные смещения, аналогичные заданной системе. При этом в дополнительных связях возникнут реактивные усилия: в связях первого рода – реактивные моменты, а в связях второго рода – опорные реакции. Но поскольку в заданной системе дополнительных связей нет, то можно записать условия равноценности: реактивные усилия в дополнительных связях от их перемещения и действия внешней нагрузки должны быть равны нулю, т. е. Тогда, система канонических уравнений метода перемещений для систем с двумя неизвестными запишется Для n-раз кинематически неопределимых систем
Система канонических уравнений метода перемещений Идея метода заключается в том, что: для того, чтобы основная и заданная система были равноценны в смысле деформаций и усилий, необходимо в основной системе связи повернуть на углы и придать им линейные смещения, аналогичные заданной системе. При этом в дополнительных связях возникнут реактивные усилия: в связях первого рода – реактивные моменты, а в связях второго рода – опорные реакции. Но поскольку в заданной системе дополнительных связей нет, то можно записать условия равноценности: реактивные усилия в дополнительных связях от их перемещения и действия внешней нагрузки должны быть равны нулю, т. е. Тогда, система канонических уравнений метода перемещений для систем с двумя неизвестными запишется Для n-раз кинематически неопределимых систем
 Таблица эпюр и опорных реакций метода перемещений Благодаря введению дополнительных связей, основная система метода перемещений представляет собой набор отдельных статически неопределимых балок постоянной жесткости по длине. Их опорные закрепления могут быть двух типов: жесткое защемление или шарнир (см. рис. а и б) Продольными деформациями элементов пренебрегаем и в силу этого возможными перемещениями узлов балок а) и б) являются: вертикальные линейные перемещения, поворот жестко закрепленного узла. Коэффициенты, входящие в канонические уравнения, представляют собой реактивные усилия в дополнительных связях от перемещений узлов и действия внешних нагрузок. Рассмотрим напряженнодеформированное состояние отдельных балок от различных видов воздействий. Аналогично решая задачу для других возможных видов воздействий, формируют таблицу напряженнодеформированных состояний отдельных балок.
Таблица эпюр и опорных реакций метода перемещений Благодаря введению дополнительных связей, основная система метода перемещений представляет собой набор отдельных статически неопределимых балок постоянной жесткости по длине. Их опорные закрепления могут быть двух типов: жесткое защемление или шарнир (см. рис. а и б) Продольными деформациями элементов пренебрегаем и в силу этого возможными перемещениями узлов балок а) и б) являются: вертикальные линейные перемещения, поворот жестко закрепленного узла. Коэффициенты, входящие в канонические уравнения, представляют собой реактивные усилия в дополнительных связях от перемещений узлов и действия внешних нагрузок. Рассмотрим напряженнодеформированное состояние отдельных балок от различных видов воздействий. Аналогично решая задачу для других возможных видов воздействий, формируют таблицу напряженнодеформированных состояний отдельных балок.
 Таблица эпюр и опорных реакций метода перемещений
Таблица эпюр и опорных реакций метода перемещений