ad3d3f6a83c2e85a8fe5b58573c07b4f.ppt
- Количество слайдов: 31



Manipulatory i roboty przemysłowe Systemy logistyczne 2 M. Stanisławski

definicja Manipulatory są to urządzenia posiadające kilka wzajemnie połączonych i przemieszczających się członów. Na ogół o kilku stopniach swobody, których zadaniem jest uchwycenie i/lub przemieszczenie obiektu ( ładunku ) Manipulator kolumnowy montowany na płycie bazowej przystosowanej do przemieszczania go wózkiem widłowym. Manipulator jest wyposażony w chwytak przyssawkowy do serów o różnych wymiarach i wadze.

Manipulatory są projektowane pod kątem : n optymalizacji pracy w procesach produkcyjnych czy łańcuchach logistycznych, tak aby miały natychmiastowy wpływ na jakość pracy i jej efektywność n podniesienie poziomu bezpieczeństwa n zapewnienie ergonomicznych warunków na stanowisku pracy n podniesienie wydajności pracy Manipulator na wózku szynowym do montażu kół

Ze względu na pochodzenie energii mechanicznej potrzebnej do działania manipulatory dzielimy na : • manipulatory ręczne ( energię do działania dostarcza człowiek ) • maszyny manipulacyjne ( są wyposażone we własne źródło energii lub energia jest dostarczana z zewnątrz ) Ze względu na sposób sterowania manipulatory dzielimy na : n sterowane ręcznie n sterowane automatycznie Wśród manipulatorów sterowanych ręcznie wyróżniamy : • manipulatory ręczne • niektóre maszyny manipulacyjne : - serwomanipulatory - telemanipulatory

n Serwomanipulator jest sterowany ręcznie bezpośrednio przez operatora ; wykorzystuje się w nim układy odtwarzające lub wspomagające ruchy operatora Telemanipulator jest sterowany ręcznie za pośrednictwem sygnałów przekazywanych przewodowo lub bezprzewodowo

Maszyny manipulacyjne sterowane automatycznie w zależności od układu sterującego dzielimy na : n roboty manipulacyjne – maszyny wyposażone w układ sterujący, który można przeprogramować n maszyny manipulacyjne automatyczne – wyposażone w stałoprogramowy układ sterujący

Podział manipulatorów przemysłowych ze względu na sposób montowania: • montowany na kolumnie w celu stworzenia indywidualnego stanowiska pracy; Manipulator może być zamontowany na stałe lub na płycie bazowej przystosowanej do przemieszczania go wózkiem widłowym. • podwieszany na stałe do płyty zamocowanej na np. na suficie, dzięki czemu eliminujemy kolumnę – w przypadku braku odpowiedniej ilości miejsca. Manipulator może być też podwieszony do wózka umieszczonego na torowisku ( szczególnie polecany do zastosowań wymagających pracy na większym obszarze). na kolumnie podwieszony na stałe podwieszony do wózka

Podział manipulatorów przemysłowych ze względu na konstrukcję ramienia : ze sztywnym ramieniem linkowy

Definicja robota Roboty przemysłowe to automatycznie sterowane manipulatory uniwersalne, stacjonarne lub mobilne, które są programowalne w trzech lub więcej osiach, przeznaczone do automatyzacji procesów przemysłowych. Podstawowe zespoły i układy robota
 :")
Podział robotów przemysłowych ze względu na strukturę kinematyczną ( ruchy ramion roboczych manipulatorów) : a. roboty stacjonarne n roboty z szeregową strukturą kinematyczną (z otwartym łańcuchem kinematycznym) maszyny manipulacyjne są budowane w postaci szeregowego połączenia członów kinematycznych; dwa sąsiednie człony połączone ze sobą za pomocą złącza tworzą parę kinematyczną złącze umożliwia wzajemny ruch członów względem siebie; ruch może być obrotowy i/lub liniowy
 Roboty z prostokątnym układem współrzędnych i prostopadłościenną przestrzenią ruchu - jest")
- kartezjańskie (PPP) Roboty z prostokątnym układem współrzędnych i prostopadłościenną przestrzenią ruchu - jest to najprostsza spośród wszystkich konfiguracji. Taka struktura manipulatora jest korzystna w zastosowaniach do montażu na blacie stołu oraz do transportu materiałów lub ładunków.
 Roboty z jednym obrotowym i dwoma liniowymi zespołami ruchu - charakteryzują")
- cylindryczne (OPP) Roboty z jednym obrotowym i dwoma liniowymi zespołami ruchu - charakteryzują się walcowym układem współrzędnych i cylindryczną przestrzenią ruchu. W takiej strukturze zmienne przegubowe są jednocześnie współrzędnymi cylindrycznymi końcówki roboczej względem podstawy, a przestrzenią roboczą jest niepełny cylinder. Nazywane są także robotami bramowymi lub suwnicowymi.
 (Selectively Compliant Assembly Robot Arm) Roboty z trzema osiami równoległymi -")
- SCARA (OOP) (Selectively Compliant Assembly Robot Arm) Roboty z trzema osiami równoległymi - dwoma o ruchu obrotowym i jedną o ruchu postępowym. Głównym przeznaczeniem tej klasy manipulatorów jest montaż elementów i podzespołów oraz powtarzalne przenoszenie detali i ich sortowanie (np. paletyzacja produktów). Strukturę tę wykorzystuje się także do tworzenia obwodów drukowanych w elektronice. SCARA posiadając strukturę (OOP), różni się od konfiguracji sferycznej wyglądem jak i obszarem zastosowania.
 (OOO) Roboty, których wszystkie 3 osie są osiami obrotowymi. Roboty o takiej")
przegubowe (antropomorficzne) (OOO) Roboty, których wszystkie 3 osie są osiami obrotowymi. Roboty o takiej konfiguracji mogą być wykorzystywane przy operacjach montażowych, polerowaniu, lakierowaniu różnego rodzaju detali.
 Roboty posiadające jeden liniowy oraz dwa obrotowe zespoły ruchu.")
- sferyczne (OOP) Roboty posiadające jeden liniowy oraz dwa obrotowe zespoły ruchu.
 Zasada")
§ roboty z równoległą strukturą kinematyczną (z zamkniętym łańcuchem kinematycznym - roboty równoległe) Zasada działania tego typu robotów opiera się na idei odpowiednio zaprojektowanych ramion robota. Użycie tych ramion pozwala ustawić pozycję i orientację ruchomej platformy. Roboty te posiadają 3 lub 6 ramion, które wprowadzają odpowiednio 3 lub 6 stopni swobody. Ruchoma platforma jest wyposażona w efektor który posiada dodatkowy stopień swobody umożliwiający np. obrót. Tego typu roboty znalazły zastosowanie m. in. w przemyśle spożywczym, farmaceutycznym oraz elektronicznym.

Roboty równoległe w porównaniu do urządzeń szeregowych, wykazują się większą dopuszczalną obciążalnością oraz dużo wyższą sztywnością. Na ich niekorzyść przemawia mniejsza przestrzeń robocza oraz skomplikowane sterowanie.

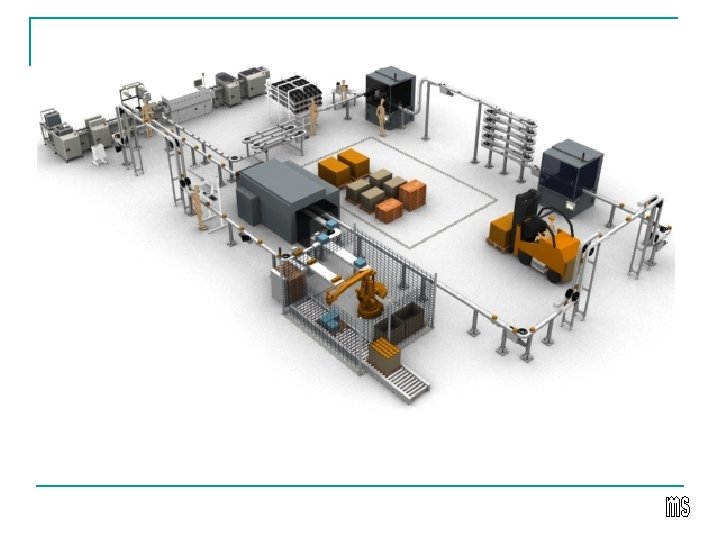
b. - roboty mobilne - roboty poruszające się po stałym torze - autonomiczne roboty mobilne (AGV - Automated Guided Vehicles) Robot AGV sterowane laserowo firmy Elettric 80 ( przedstawione w pracy pt Wózki transportowe )

Klasyfikacja robotów ze względu na rodzaj napędu: n W zależności od rodzaju energii do wprawiania w ruch mechanizmów robota, rozróżnia się napędy: - pneumatyczny - hydrauliczny - elektryczny n Obecnie większość robotów wyposażona jest w napędy elektryczne, znacznie rzadziej stosowane są napędy pneumatyczne i hydrauliczne (bardziej jako drugie źródło energii w urządzeniu do napędzania niektórych elementów).

Klasyfikacja robotów ze względu na sterowanie: n n roboty sekwencyjne: roboty z sekwencyjnym układem sterowania. roboty realizujące zadane trajektorie: roboty realizujące ustaloną wcześniej procedurę ruchów, według instrukcji określającej żądane pozycje i prędkość ruchu. roboty adaptacyjne: roboty o najbardziej zaawansowanym technologicznie układzie sterowania, pozwalającym na adaptację ruchów robota w zależności od aktualnej sytuacji, np. roboty wyposażone w czujniki wizyjne, dzięki którym możliwa jest korekta ruchów podczas wykonywania danej czynności. Układy takie charakteryzują się możliwością zmiany własności, dzięki wykorzystaniu informacji z czujników lub nagromadzonych doświadczeń, planowania zadań lub przez nauczanie. teleoperator - robot ze sterowaniem zdalnym, realizowanym przez operatora lub komputer

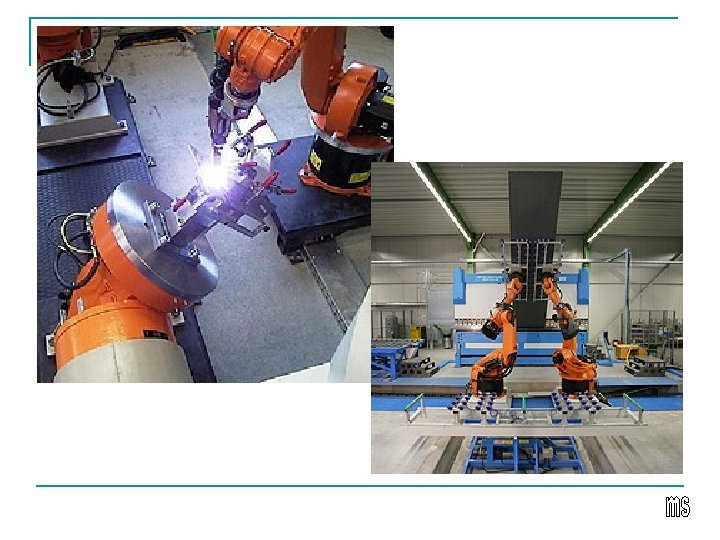
Klasyfikacja robotów ze względu na rodzaj wykonywanej pracy: - spawalnicze - montażowe - paletyzujące i depaletyzujące - transportujące - malarskie - do przenoszenia materiałów i załadunku palet (AGV, LGV) - roboty stosowane do obróbki materiałów spawalniczy do przenoszenia materiałów malarski

Zastosowanie robota równoległego do załadunku produktu do opakowania

sortowanie Magazyn narzędziowy

Roboty przemysłowe FANUC Robotics przeznaczone są dla różnej gamy zastosowań, takich jak: - spawanie - zgrzewanie - obróbka metali, - mechaniczny montaż, -cięcie laserowe oraz przy użyciu strumienia wody, - pakowanie, - załadunek, rozładunek, Podstawowe dane techniczne kontrola osi - stopni swobody - 6 obciążenie – kg – 120 dokładność pozycjonowania – mm - 0, 5 zasięg ramienia – mm – 2413 masa ok. – kg – 1600 możliwość obrotu wokół własnej osi o 300 stopni

Kilka ciekawostek ze świata robotów za : www. asimo. pl - historia robotyki 2001 firma Omron wypuszcza na rynek elektronicznego kota - Ne. Co. Ro, jako konkurenta dla mechanicznego psa Aibo sprzedawanego przez Sony. Ne. Co. Ro został wyposażony w technologię Mind and Consciousness (Ma. C), która pozwala zwierzakowi okazywać uczucia 2006 rozpoczyna się sprzedaż robota humanoidalnego PLEN firmy Systec Akazawa. Urządzenie potrafi chodzić, jeździec na wrotkach i deskorolce oraz kopać piłkę. Cechą, która wyróżnia nowego robota spośród podobnych mu urządzeń, jest niezwykła precyzja balansu korpusu humanoida. 2006 firma VECNA Technologies buduje robota - sanitariusza do celów militarnych - BEAR. Humanoidalny robot firmy Vecna może chodzić, biegać, podnosić ciężkie przedmioty oraz wchodzić po schodach na swoich ruchomych nogach z napędzanymi gąsienicami.

2006 Międzynarodowy zespół naukowców skonstruował robotykaraluchy, którym udało się wniknąć w środowisko prawdziwych karaluchów. Po niedługim czasie roboty były w stanie manipulować większością żywych osobników. 2006 powstaje robot Eve. R-2 - udoskonalona wersją robota - kobiety Eve. R-1 stworzoną przez południowokoreańskich inżynierów. Robot nazwany Eve. R 2 -Muse wyglądem przypomina typową, dwudziestoletnią Koreankę. Urządzenie potrafi rozmawiać i śpiewać, a to dzięki wbudowanemu "silnikowi dialogu" (ang. embedded dialogue engine). 2007 W Płd. Korei powstaje Kansei - zrobotyzowana, sztuczna twarz reagująca na słyszane słowa właściwym wyrazem twarzy, imitującym emocjonalną interpretację danego słowa. Urządzenie potrafi przedstawić 36 różnych wyrazów twarzy. 2007 Robot Domo został wyposażony w kamery zamknięte w obudowach przypominających ludzkie oczy. Robot wyposażony został w zaawansowane oprogramowanie pozwalająca na rozpoznawanie i śledzenie twarzy osób znajdujących się w zasięgu jego wzroku, rozpoznawanie i śledzenie różnych obiektów, a także bardzo dobrą koordynację wzroku z ruchami ramion. Domo wyposażono także w system rozpoznawania mowy.

2007 firma Shadow stworzyła rękę robota, która wyglądem jest bardzo zbliżona do ręki człowieka. Producent podaje, że sztuczna dłoń może wykonywać wszystkie ruchy, jakie może robić ludzka dłoń. Projekt Shadow ma zintegrowane sensory oraz system pozycjonujący, pozwalający na precyzyjne sterowanie za pomocą komputera. Dłoń zawiera ok. 40 mięśni powietrznych, które powodują ruch ręki. 2007 Firma Adept Technology rejestruje z Amerykańskim Urzędzie Patentowym system Smart Camera. Opatentowany system obejmuje inteligentne kamery sprzężone z robotami, lub innymi ruchomymi mechanizmami, a jego unikalność polega na tym, że obraz jest przetwarzany już przez samą kamerę. System taki pozwala drastycznie obniżyć koszty wykorzystywania systemów wizyjnych w produkcji. 2007 Naukowcy z Intel'a wykorzystali czujniki pola elektrycznego do stworzenia technologii pre-touch, która umożliwia robotom dokonanie wstępnej oceny ludzi i obiektów, które napotykają. Technologia ta sprawia, że robot może "wyczuć" z odległości rozmiar i kształt obiektu, do którego się zbliża i zareagować adekwatnie 2007 Firma KUKA Robotics ogłosiła skonstruowanie najsilniejszego, jak dotąd, robota. Zasilany jest przez 9 silników, które razem dostarczają mu moc porównywalną do mocy średniego samochodu. Tytanowy, sześcioosiowy KUKA KR 1000 może dźwigać ładunek o masie do 1000 kg przy zasięgu 320 cm. Może on wytrzymać obciążenie 60000 Nm statycznego momentu.

literatura n Matulewski M. ; Systemy logistyczne. Podręcznik do kształcenia w zawodzie technik logistyk. ; Biblioteka Logistyka Poznań 2007 n Kordowicz-Sot A. ; Automatyka i robotyka. Robotyka. ; WSi. P Warszawa 1999 n internet
ad3d3f6a83c2e85a8fe5b58573c07b4f.ppt