Локальные особенности изображений.ppt
- Количество слайдов: 20



Локальные особенности изображений

План 1. Введение в компьютерное зрение. Примеры решаемых задач. Краткие основы представления изображений внутри компьютера. 2. Получение бинарных изображений. Анализ бинарных изображений. Подсчет и маркировка связанных компонент. Распространенные операции над бинарными изображениями и их практическое применение. 3. Основы распознавания образов - классификация изображений. Выделение признаков и представление объекта в виде вектора признаков. Деревья решений. Байесовский подход к принятию решений. Нейронные сети. 4. Фильтрация изображений и обнаружение низкоуровневых признаков. Выравнивание гистограммы, удаление шума, удаление малых компонент. Сглаживание изображения. Обнаружение краев. 5. Обнаружение локальных особенностей изображения. Sift, Surf, примеры использования.
 n Некоторые области изображения, которые с высокой вероятностью")
Локальные особенности В оригинале (local features) n Некоторые области изображения, которые с высокой вероятностью сохранятся при небольшом изменении ракурса, освещения, наклона или поворота камеры, изменения масштаба и так далее. n
 n Нахождение похожих изображений/дубикатов n")
Применение Сшивание панорам n Обнаружение объектов (роботы!) n Нахождение похожих изображений/дубикатов n

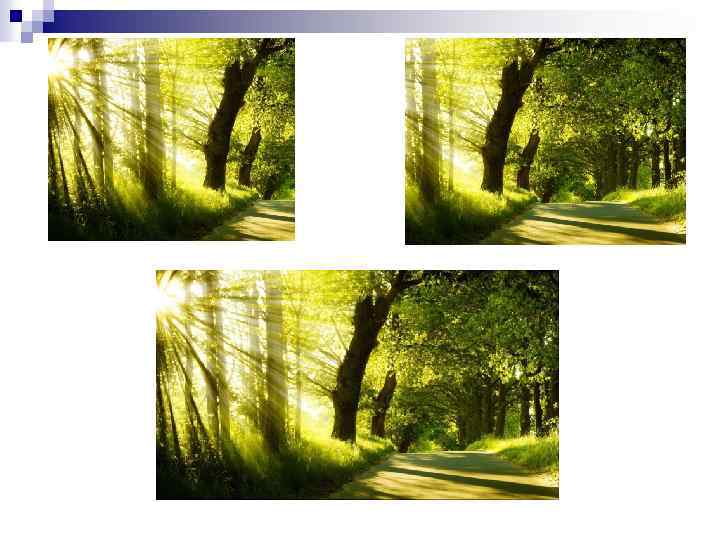
Сшивание панорам

Сшивание панорам

Сшивание панорам

Как это работает?

Основные шаги алгоритма n n Выделение ключевых точек (Do. G – Difference of Gaussians для Sift или Hessian для Surf) Фильтрация ключевых точек – выбросить наименее интересные Вычисление дескрипторов ключевых точек Сравнение двух наборов ключевых точек

Выделение ключевых точек

Присваивание направления

Вычисление дескрипторов dx – отклик вейвлета Хаара по x, dy – отклик вейвлета Хаара по y. Для каждого подрегиона (выделены жирными линиями) считаются все его отклики вейвлета. Для каждого из подрегионов вычисляются следующие 4 числа: Σ dx Σ |dx| Σ dy Σ |dy| dx и dy каждого результата естественно считаются относительно ориентации сетки 4 * 16 = 64 элементный дескриптор Вейвлет Хаара по X (слева) и по Y(справа). Черные области соответсвуют весу -1, а светлые весу 1
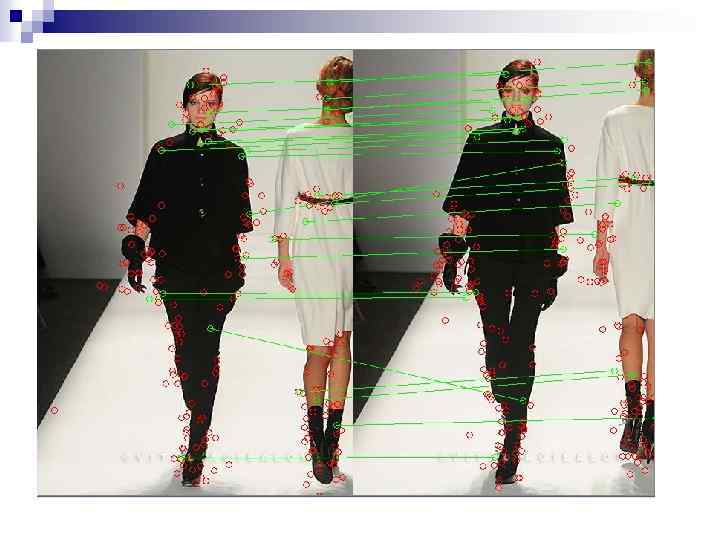
 < Eps) n по двум")
Нахождение похожих ключевых точек по близости дескрипторов (Distance(A, B) < Eps) n по двум ближайшим: Distance(A, B)/Distance(A, C) < 0. 65. n

Сопоставление изображений По количеству совпавших ключевых точек n Определение геометрической модели – Ransac (RANdom SAmple Consensus) n

Есть реализация в Open. Cv! Surf реализован в Open. Cv.
 n GPS координаты для склеивания")
Практическое применение Surf n Распараллеле ная (xml over http) n GPS координаты для склеивания (python-скрипт) n

Еще одна интересная библиотека n Ar. Toolkit – детектирование простых меток для расширенной реальности.

Ar. Toolkit в действии
Локальные особенности изображений.ppt