Линейная алгебра.pptx
- Количество слайдов: 82



ЛИНЕЙНАЯ АЛГЕБРА

СПИСОК ЛИТЕРАТУРЫ Кремер Н. Ш. Высшая математика для экономистов. Данко П. Е. , Попов А. Г. , Кожевникова Т. Я. Высшая математика в упражнениях и задачах. Гусак А. А. , Гусак Г. М. , Бричикова Е. А Справочник по высшей математике.
")
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ (СЛУ)
, образуют")
Основные определения СЛУ называется система вида Числа aij, , называемые коэффициентами системы (1), образуют прямоугольную числовую таблицу (2), которая называется основной матрицей системы (1).
 – расширенная матрица (1). Решением системы линейных уравнений называется упорядоченный набор чисел (α")
(3) – расширенная матрица (1). Решением системы линейных уравнений называется упорядоченный набор чисел (α 1, …, αn) при подстановке которых в СЛУ (1) вместо неизвестных x 1, … , xn соответственно, каждое из уравнений в СЛУ (1) обращается в верное числовое равенство. Решить систему – это значит найти множество всех ее решений.
 называется совместной, если она имеет хотя бы одно решение и")
Cистема линейных уравнений (1) называется совместной, если она имеет хотя бы одно решение и называется несовместной, если у нее решений нет. СЛУ называется однородной, если все ее свободные члены bi =0 Пример 1 Матрица является расширенной матрицей системы Неизвестная переменная xi в СЛУ называется базисной, если она встречается в единственном уравнении системы и имеет коэффициент единица. x 1, x 3, x 4 - базисные переменные. CЛУ имеет базисный вид, если в каждом уравнении есть базисная переменная.

Алгоритм решения СЛУ в базисном виде

Решение:
 Определение. Две СЛУ называются равносильными,")
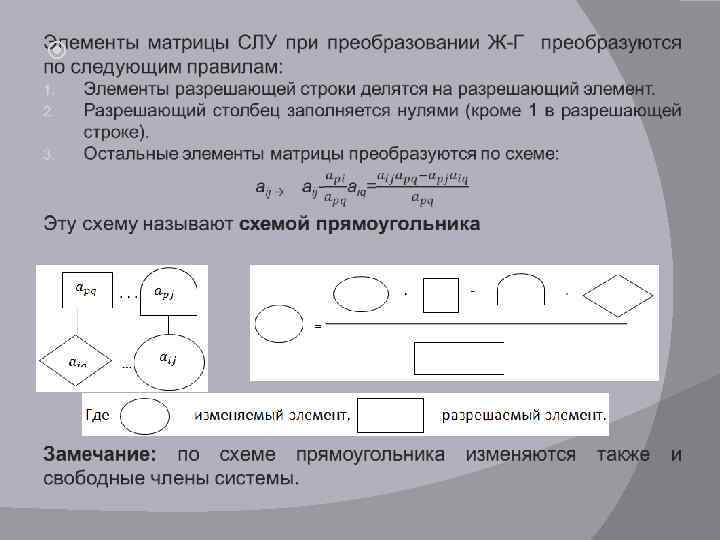
Преобразование произвольной СЛУ к базисному виду. Метод Жордана-Гаусса (Ж-Г) Определение. Две СЛУ называются равносильными, если множества их решений совпадают. Преобразования, при которых СЛУ преобразуется в равносильную, называются элементарными. Элементарные преобразования: а) умножение на число λ≠ 0 правой и левой частей i-ого уравнения системы; б) прибавление к левой и правой частям i-ого уравнения соответствующих частей j-ого уравнения умноженных на число λ; в) перестановка местами i-ого и j-ого уравнений; г) удаление из системы нулевого уравнения 0ˑx 1+0ˑx 2+…+0ˑxn=0

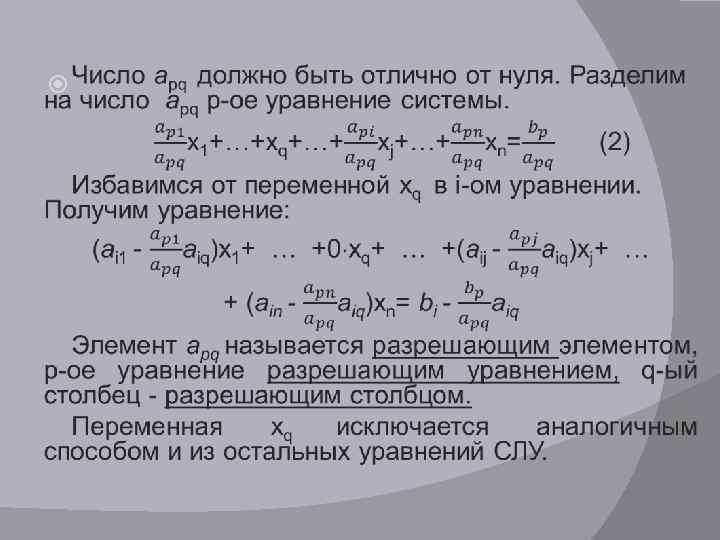
Теорема. При элементарных преобразованиях система линейных уравнений преобразуется в равносильную ей систему. Преобразование Ж-Г представляет собой цепочку элементарных преобразований, после которых выбранная переменная становится базисной в выбранном уравнении. Допустим, что мы хотим сделать переменную xq базисной переменной в р-ом уравнении системы:

Пример 3. Решить систему линейных уравнений

АРИФМЕТИЧЕСКИЕ ВЕКТОРЫ

Арифметическим вектором размерности n называется упорядоченный набор n чисел (а 1, … , а n). Множество всех n-мерных векторов обозначают Rn = R x … x R Решения СЛУ являются арифметическими векторами. Суммой двух n-мерных векторов а =(а 1, …, аn) и b =(b 1, …, bn) называется вектор a+b =(a 1+b 1, . . , an+bn). Произведением вектора а на число α называется вектор αa=(αa 1, …, αan). Разность векторов a и b находится по правилу: a -b = a +(-1)b =(a 1 -b 1… an-bn). Операции сложения (вычитания) векторов и умножение вектора на число называется линейными операциями над векторами.

Свойства линейных операций Для любых справедливо: 1. 2. 3. нулевой вектор 4. 5. 6. 7. 8. Все свойства являются следствиями свойств сложения и вычитания чисел. Эти свойства называются аксиомами линейного пространства.

Определение. Любое множество элементов с введенным на нем операциями сложения векторов и умножения векторов на число, удовлетворяющее аксиомам 1 -8, называют линейным пространством. Примеры: 1) Множество арифметических векторов образуют линейное пространство. 2) Множество геометрических векторов пространства (плоскости, прямой) образуют линейное пространство.

Векторная форма СЛУ Линейной комбинацией векторов а 1, …, аm коэффициентами α 1, …, αm называется вектор b = α 1 а 1 +…+ αmаm Пример. Выяснить будет ли вектор линейной комбинацией векторов , , , c
 В условии (1) – неизвестные числовые")
Запишем, что b является линейной комбинацией векторов (1) В условии (1) – неизвестные числовые коэффициенты. Если при каких-то равенство (1) выполняется, то вектор является линейной комбинацией векторов Если равенство (1) не имеет решений , вектор не является линейной комбинацией векторов Запишем (1), используя выражения векторов , которые для наглядности записаны в виде столбцов. (2) Равенство (2) – другая форма записи равенства (1).
 Последнее равенство равносильно системе (3) Итак, система (3)")
Выполним действия в левой части равенства(2) Последнее равенство равносильно системе (3) Итак, система (3) равносильна векторному равенству (1). Это значит, что решения (1) – это решения системы (3).

Решим ее методом Ж-Г. ῀ ῀ Переменные x 3 и x 4– свободные. Тогда: Cистема (3) имеет бесконечное множество решений.
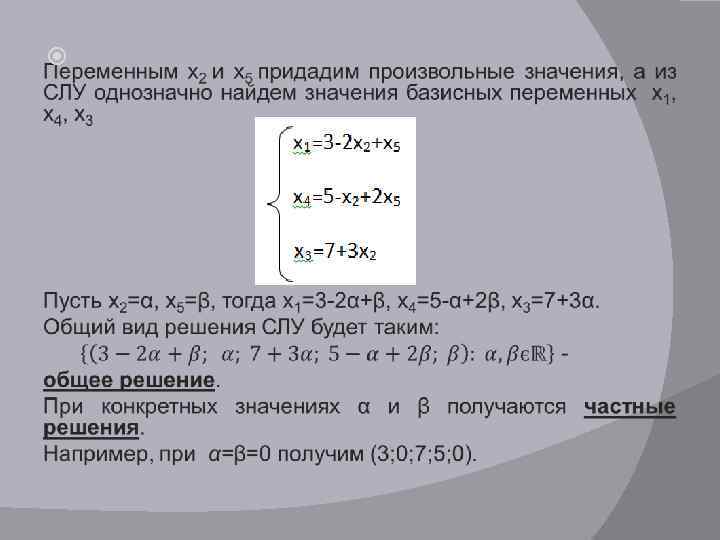
. Например, при α= β=0 получаем частное решение системы")
Эти же решения являются решениями (1). Например, при α= β=0 получаем частное решение системы (4; 3; 0; 0) и, значит, решение векторного уравнения (1): Таким образом, вектор является линейной комбинацией векторов . Заметим, что векторы а 1, …, аn являются столбцами матрицы СЛУ (3), а вектор столбцом свободных членов системы (3). Векторное равенство(1) называют векторной формой записи СЛУ (3).
 и СЛУ (3) имеют одинаковые решения. Следствие. CЛУ (3) совместна")
Теорема. Векторное уравнение (1) и СЛУ (3) имеют одинаковые решения. Следствие. CЛУ (3) совместна тогда и только тогда, когда вектор свободных членов является линейной комбинацией векторов столбцов основной матрицы.

Линейная зависимость векторов Система векторов называется линейно зависимой, если найдется ненулевое решение векторного уравнения (1) Если же равенство (1) выполняется только при нулевых значениях переменных , то система векторов называется линейно независимой. Примеры: 1) Система векторов S линейно зависима, так как , то есть выполняется равенство
 Составим векторное уравнение . Ему соответствует однородная СЛУ с расширенной матрицей , то")
2) Составим векторное уравнение . Ему соответствует однородная СЛУ с расширенной матрицей , то есть система имеет вид Из первого уравнения = 0, из второго = 0, из третьего = 0. Значит, СЛУ имеет только нулевое решение. Значит, система векторов линейно независимая.

Свойства линейной зависимости и независимости 1. Перестановка местами векторов системы не влияет на линейную зависимость (независимость) векторов этой системы, то есть какой система была до перестановки, такой она и осталась. 2. Если система векторов линейно независима то любая ее подсистема тоже линейно независима. 3. Если система векторов имеет линейно зависимую подсистему, то и сама она линейно зависима.

Пример: Дана система векторов Будут ли векторы системы S линейно зависимы и, если да, то какова зависимость? Для ответа на вопрос задачи надо решить векторное уравнение

Составим СЛУ связанную с данным векторным уравнением: ῀ …. ῀ общее решение Полагая, что α=2, получим

Линейные зависимости в общем случае ищутся так: Нужно составить векторное уравнение и решить соответствующую ему СЛУ. Если она имеет только нулевое решение, то система векторов линейно независима. Ненулевые решения этой системы позволяют находить линейные зависимости между векторами системы.

Рассмотрим систему S: k-мерных векторов. Теорема. Если число n векторов в системе S больше их размерности k, то такая система векторов линейно зависима. Пример: Так как 4>3, то система векторов линейно зависима. Следствие. Любые n+1 n-мерные вектора линейно зависимы.

Базис и ранг Рассмотрим систему векторов S: Определение. Подсистема Т системы S называется системой образующих для системы S, если каждый вектор системы S выражается в виде линейной комбинации векторов подсистемы Т. Пример: Система Т является системой образующих для системы S т. к.

Определение. Базисом системы векторов S называется линейная независимая система образующих. Итак, что бы быть базисом подсистема должна быть линейно независимой, и чтобы каждый вектор системы S можно было выразить через векторы подсистемы Т. Пример. Найти базис системы векторов Базисом этой системы является один вектор. Так, вектор образует базис, так как Вектор тоже образует базис. Действительно, Базисом будет и Теорема. Число векторов в любом базисе системы векторов одинаково.

Определение. Рангом системы векторов S называется число векторов в любом ее базисе. Обозначение ранга системы векторов S r(S). Пример. Найти ранг и базис системы векторов: Составим векторное уравнение: (*) Ему соответствует СЛУ: (**)
 к базисному виду: ῀ ῀ СЛУ (**) равносильна СЛУ (**’) А эта")
Приведем СЛУ(**) к базисному виду: ῀ ῀ СЛУ (**) равносильна СЛУ (**’) А эта система соответствует векторному уравнению В другой форме записи (*’)
 и(**’) следует равносильность(*) и (*’). В системе векторов , ,")
Из равносильности систем (**) и(**’) следует равносильность(*) и (*’). В системе векторов , , , базис образуют векторы , так как они линейно независимы и являются системой образующих Ввиду равносильности (*) и (*’) получим и - линейно независимы. Итак, за базис системы S можно взять , ранг системы векторов равен двум r(S) = 2.

Алгоритм нахождения базиса: 1. Образовать матрицу, записав векторы системы в виде столбцов. 2. Элементарными преобразованиями привести матрицу к базисному виду. 3. Найти базис столбцов преобразованной матрицы (он образован единичными базисными векторами). 4. Векторы с соответствующими номерами образуют базис столбцов исходной матрицы. Находя базис системы векторов, мы можем определить ее ранг - число базисных векторов.
 вектор, являющийся")
Свойства ранга 1. Ранг системы векторов не изменится, если к системе добавить(удалить) вектор, являющийся линейной комбинацией остальных векторов системы. 2. Ранг не меняется при перестановке векторов системы. 3. Ранг равен наибольшему числу линейно независимых векторов системы. 4. Ранг равен наименьшему числу элементов в системе образующих. 5. При элементарных преобразованиях строк матрицы не изменяется ранг системы ее столбцов. 6. При элементарных преобразованиях матрицы не изменяется ранг системы ее строк.

Рассмотрим произвольную матрицу А. Элементарными преобразованиями строк и столбцов ее можно преобразовать к виду: r строк r столбцов Ранг системы строк матрицы А равен рангу системы столбцов полученной матрицы А’. Это общее значение называется рангом матрицы А; r = r (A).

МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ

Линейные операции над матрицами Матрицей называется прямоугольная числовая таблица Число m ее строк и число n ее столбцов называют размерами матрицы A; при этом пишут dim A =m×n. Mmxn - множество всех матриц размера m×n.
 – матрица, состоящая из одной строки. Матрица-столбец – матрица, состоящая")
Виды матриц: Матрица-строка (вектор-строка) – матрица, состоящая из одной строки. Матрица-столбец – матрица, состоящая из одного столбца. Квадратная матрица – матица, у которой число строк равно числу столбцов (m=n) Квадратная матрица 2 -го порядка Элементы квадратной матрицы, у которых i=j, называются элементами главной диагонали. с11, с22 – элементы главной диагонали Диагональная матрица – матрица, у которой все элементы, кроме элементов главной диагонали, равны нулю. Единичная матрица – это диагональная матрица, у которой элементы главной диагонали равны единице. Нулевая матрица – матрица, у которой все элементы равны нулю.

Определение. Суммой матриц А и В одинаковой размерности mxn называется матрица С той же размерности, каждый элемент которой равен сумме элементов матриц А и В, стоящих на тех же местах: Пусть
")
Свойства сложения: 1. А + В = В + А. 2. (А + В) + С = А + (В + С). 3. Если О – нулевая матрица, то А + О = О + А = А Замечание. Справедливость этих свойств следует из определения операции сложения матриц.

Умножение матрицы на число Определение. Произведением матрицы А на число α называется матрица αA с элементами ; Свойства умножения матрицы на число: 1. 2. 3. Операции сложения матриц и умножения матрицы на число называют линейными операциями.

Примеры:

Умножение матрицы на матрицу требует выполнения определенных условий для размерностей сомножителей, а именно: число столбцов первого множителя должно равняться числу строк второго. Определение. Произведением матрицы А размерности m × n и матрицы В размерности n×k называется матрица С размерности m×k, такая что (*) Нетрудно заметить, что число столбцов А равно числу строк В. Только для таких матриц определено произведение АВ.

Примеры: Найти 1. При этом существует произведение АВ, но не существует произведение ВА. Размерность матрицы С=АВ составляет 2 x 3 Найдем элементы матрицы С: Итак,

2. Даны матрицы и . Найдите произведение А на В и В на А. Так как порядок матрицы А равен 3 на 1, а матрицы В равен 1 на 3, то А ⋅ В будет иметь порядок 3 на 3, а В ⋅ А порядок 1 на 1. .
 АВ = (1 2 7) =( 1 * 3 + 2 * 5")
2) АВ = (1 2 7) =( 1 * 3 + 2 * 5 + 7 * 4) =( 41) A M₁x 3 , B M₃x 1 , C M 1 х1 ВА = (1 2 7) = M₃x 3 3) (1 2 7) = ?

Пример Даны матрицы Найдите Решение Начнем с умножения матрицы А на В: Умножим единичную матрицу второго порядка Е на два:

Сложим полученные результаты: Осталось выполнить умножение на матрицу А: Итак: На множестве матриц определены три операции: сложение матриц одного порядка, умножение матрицы на число и умножение матриц подходящих порядков.

Обратная матрица Определение. Квадратная матрица В называется обратной для квадратной матрице А того же порядка, если АВ = ВА = Е. При этом В обозначается . Определение. Квадратная матрица А называется невырожденной, если ее ранг равен числу строк (столбцов). Это означает, что строки (столбцы) матрицы линейно независимы. Теорема. Для существования обратной матрицы необходимо и достаточно, чтобы исходная матрица была невырожденной.

Алгоритм нахождения обратной матрицы 1. Приписать справа к матрице А единичную матрицу соответствующих размеров . 2. Элементарными преобразованиями строк матриц преобразовать к виду 3. Получившаяся в правой половине матрица В и будет обратной для А. A E ῀ ῀

Матричная форма СЛУ Пусть дана система n линейных уравнений с n неизвестными с невырожденной основной матрицей А: (1) Ей соответствует матричное уравнение: (2) которое можно записать в виде: АХ = В, (3) А= – основная матрица, Х – столбец неизвестных, В – столбец свободных членов.

Так как основная матрица системы невырождена, то для нее существует обратная А-1. Умножим на нее обе части уравнения (3) слева: А-1(АХ) = А-1 В. Так как произведение матриц ассоциативно, имеем: ( А-1 А) Х = А-1 В. Отсюда ЕХ = А-1 В. Поэтому, решение системы (1) и матричного уравнения (2), (3) можно найти по формуле: Х = А-1 В.
ХА")
Примеры. Решить матричные уравнения, при условии, что существуют А-1 , С-1 и D-1 1)ХА = В 2) АХС = В 3) АХD + С = В 1)ХА = В (ХА) А-1 = ВА-1 ; Х = ВА-1 2)АХС = В Х = А-1 ВС-1 3)АХD+С =В, АХD =В – С; Х = А-1 (В - С)D-1

Пример. Решить СЛУ матричным способом Запишем систему в матричном виде: или АХ = В

Пример. Найти неизвестную матрицу Х из уравнения: Решение. Обозначим данные матрицы соответственно буквами А, В и С. В результате получим следующее матричное уравнение: В результате получаем решение: Находим обратные матрицы для А и В: Полученные обратные матрицы А и В подставляем в равенство

Из алгебраических дополнений составляется матрица, которая называется присоединенной.

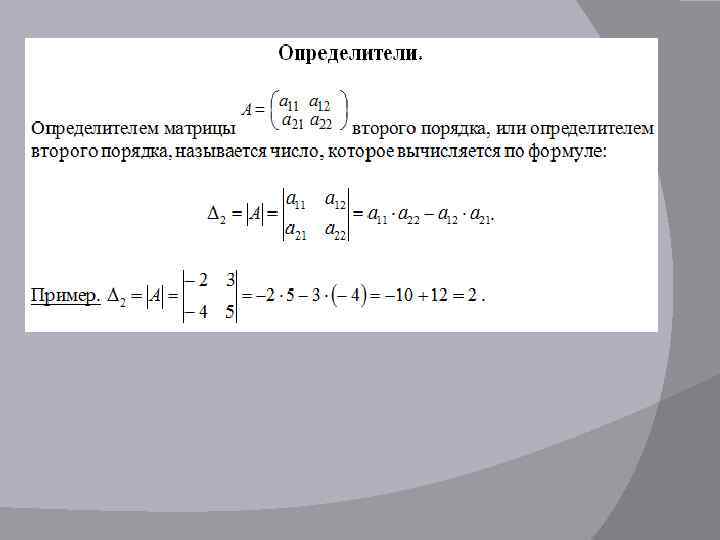
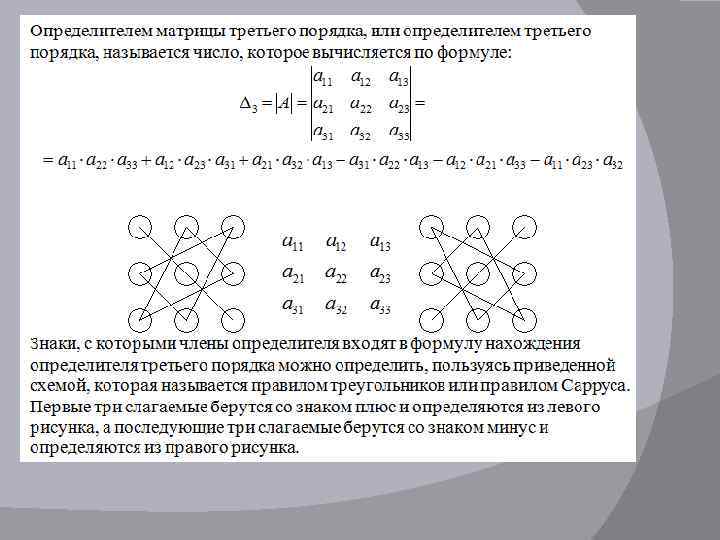
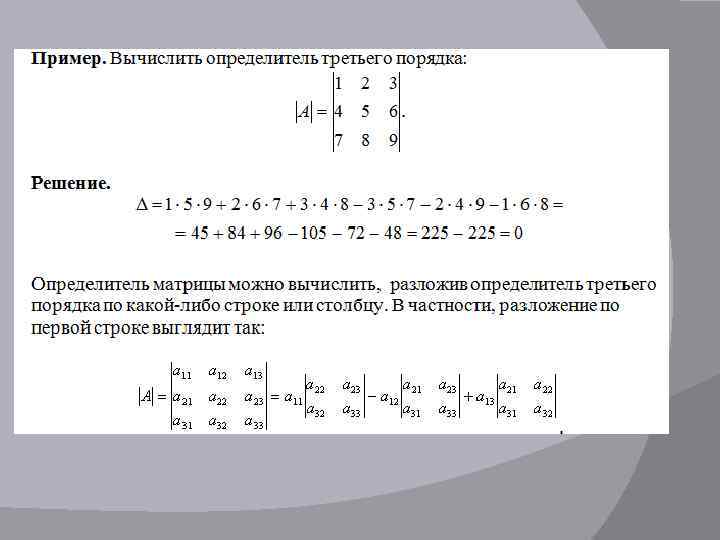
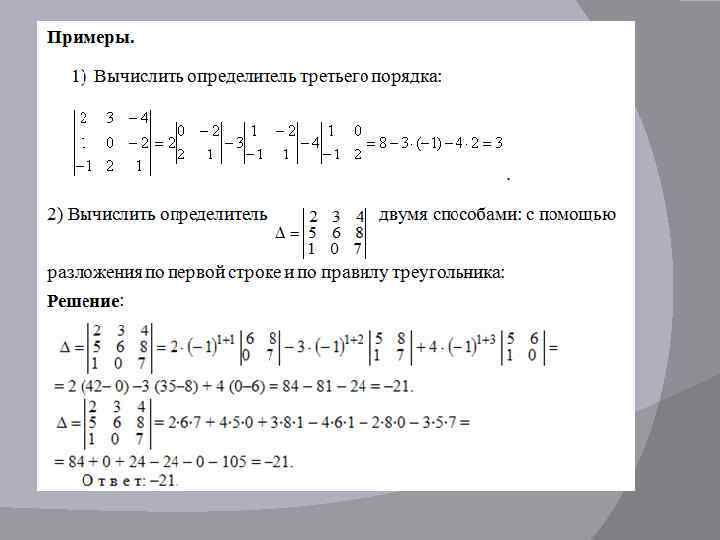
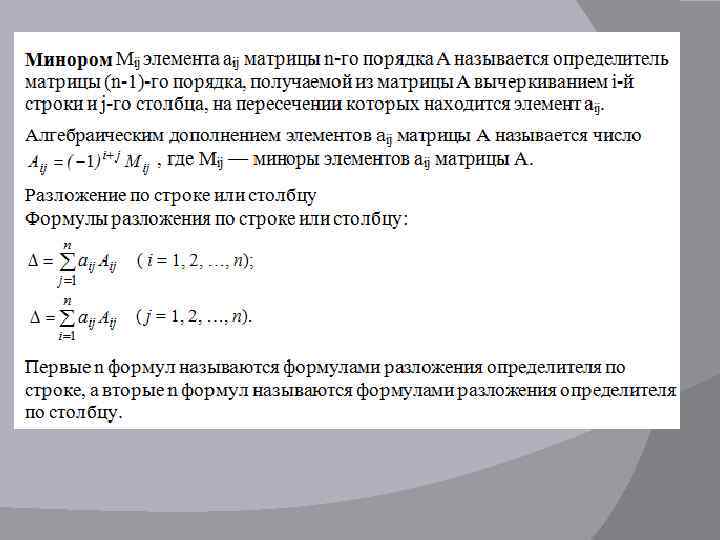
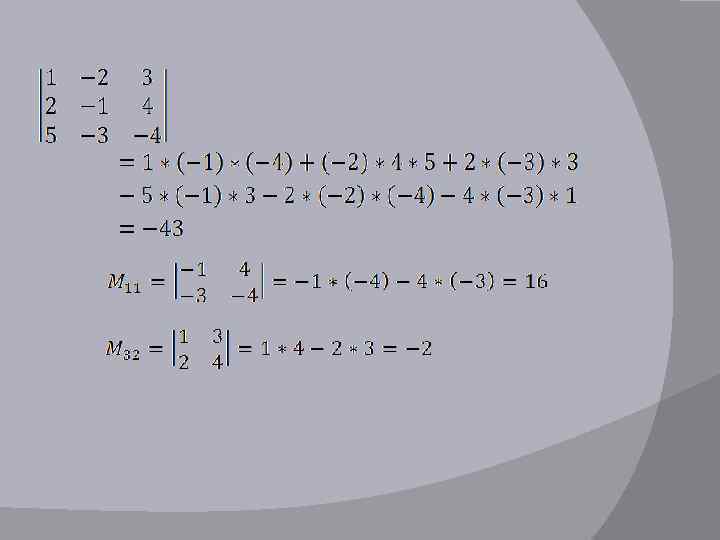
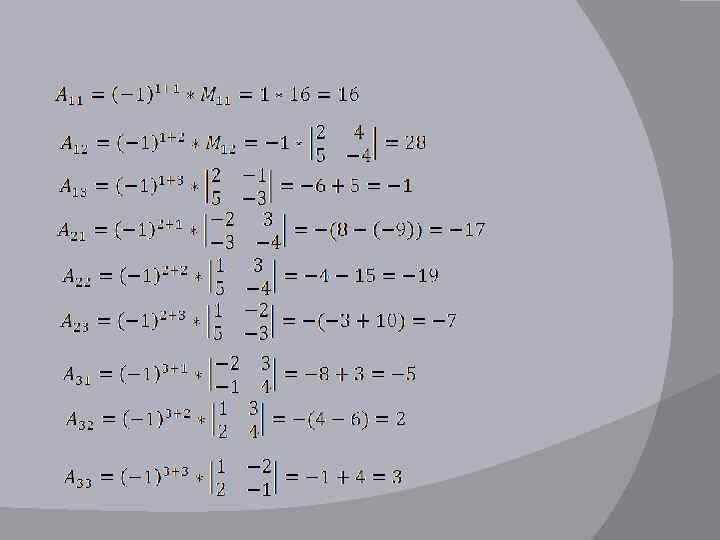
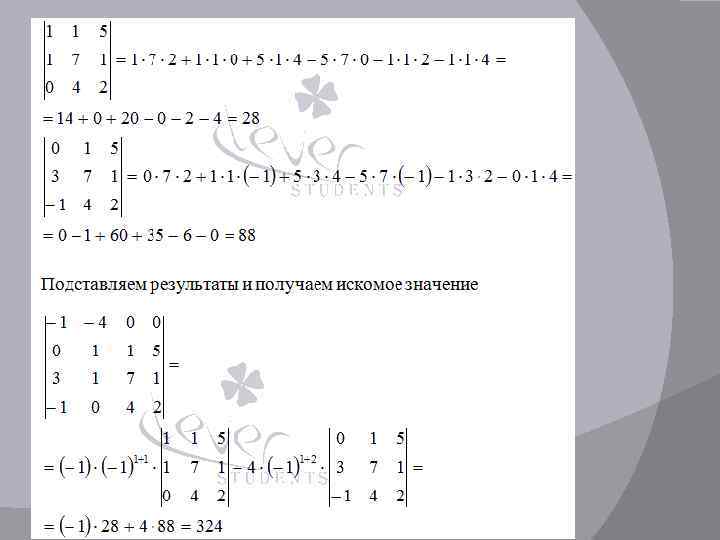
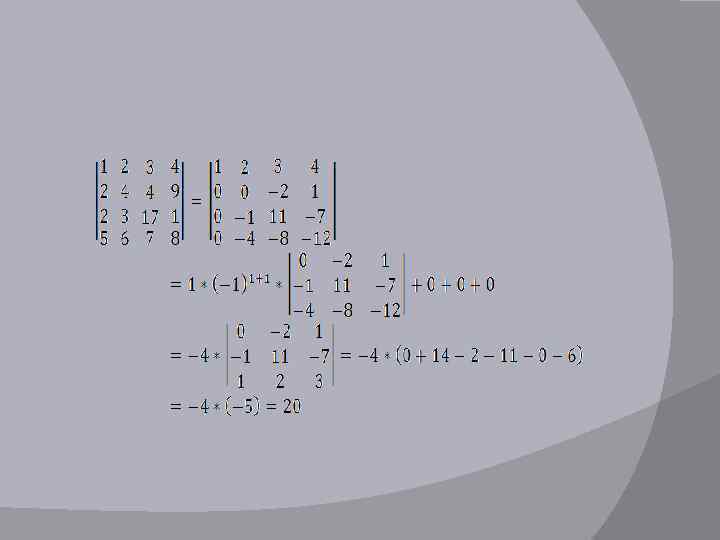
Правила вычисления определителя любого порядка Теорема Лапласа: Определитель квадратной матрицы равен сумме произведений элементов любой его строки (столбца) на их алгебраические дополнения. Вычислим определитель А разложением по i-той строке: Вычислим определитель разложением по j-тому столбцу:
 состоит из")
Некоторые свойства определителей: Определитель равен нулю, если одна из его строк (столбцов) состоит из одних нулей. Определитель равен нулю, если две его строки (столбца) равны или пропорциональны. Общий множитель элементов любой строки (столбца) можно выносить за знак определителя. При транспонировании матрицы её определитель не меняется. При перестановке двух строк (столбцов) определитель меняет свой знак на противоположный. Определитель не изменится, если к элементам любой его строки (столбца) прибавить элементы другой строки (столбца), умноженные на одно и тоже отличное от нуля число. Преобразование Ж-Г с разрешающим элементом 1 не меняет определитель.

Обратная матрица Алгоритм вычисления обратной матрицы А: Вычисляем определить матрицы : Вычисляем алгебраические дополнения всех элементов матрицы А и составляем из них присоединенную матрицу. Транспонируем присоединенную матрицу получим союзную матрицу: Вычисляем обратную матрицу по формуле:

Пример. Найти обратную матрицу к матрице: Союзная матрица, транспонированная к присоединенной, имеет вид: Разделив каждый элемент этой матрицы на D=10 получим обратную матрицу:

Правило Крамера Рассмотрим систему n линейных уравнений с n неизвестными с невырожденной основной матрицей А.

∆ - определитель, составленный из коэффициентов при неизвестных, ∆1 – определитель, полученный из ∆ заменой в нем первого столбца на столбец свободных членов. ∆2 – из ∆ заменой 2 го столбца на столбец свободных членов, ∆3 – из ∆ заменой 3 го столбца на столбец свободных членов.

Аналитическая геометрия на плоскости в формулах Расстояние между двумя точками Координаты Деление середины отрезка в данном отношении Уравнение прямой с угловым коэффициентом Где k – угловой коэффициент прямой; b – число.

Аналитическая геометрия на плоскости в формулах Уравнение прямой в общем виде Где А, В, С – числа. Уравнение прямой, проходящей через данную точку Уравнение прямой, проходящей через две точки Угол между двумя прямыми где k 2 , k 1 – угловые коэффициенты прямых. Формула берётся со знаком «+» , если угол между прямыми острый, т. к. тангенс острого угла – число положительное; Формула берётся со знаком «-» , если угол между прямыми тупой, т. к. тангенс тупого угла – число отрицательное.

Аналитическая геометрия на плоскости в формулах Условия параллельности и перпендикулярности прямых а || в, если k 2 = k 1 , где а, в – прямые, k 1, k 2 – угловые коэффициенты прямых а в, если k 2 = здесь а, в – прямые, k 1, k 2 – угловые коэффициенты прямых Расстояние от точки до прямой Точка пересечения двух прямых

Аналитическая геометрия в пространстве Уравнение плоскости в пространстве, проходящей через точку M 0 (x 0 ; y 0 ; z 0), перпендикулярно вектору n=(A; B; C): Общее уравнение плоскости: Уравнение плоскости, проходящей через три точки: Уравнение плоскости в отрезках A (a; 0; 0), B (0; b; 0), C (0; 0; c)
 – направляющий")
Уравнение прямой в пространстве o Параметрическое: o Каноническое: S (m; n; p) – направляющий вектор, M 0 (x 0 ; y 0 ; z 0) o Уравнение прямой, проходящей через две точки: o Общее уравнение (пересечение двух плоскостей)
Линейная алгебра.pptx