

лекция ад+.ppt
- Количество слайдов: 39
 Лекция Асинхронный двигатель – машина переменного тока, у которой скорость ротора при постоянной частоте тока в сети изменяется в зависимости от величины нагрузки на валу
Лекция Асинхронный двигатель – машина переменного тока, у которой скорость ротора при постоянной частоте тока в сети изменяется в зависимости от величины нагрузки на валу
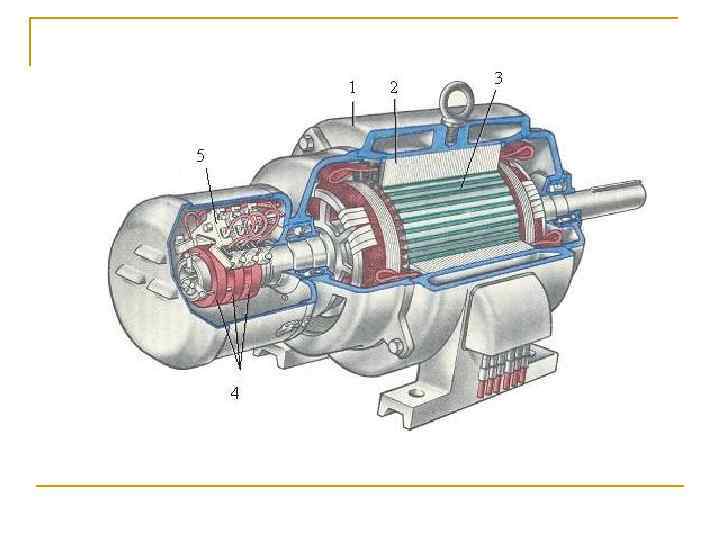
 Конструкция статора
Конструкция статора
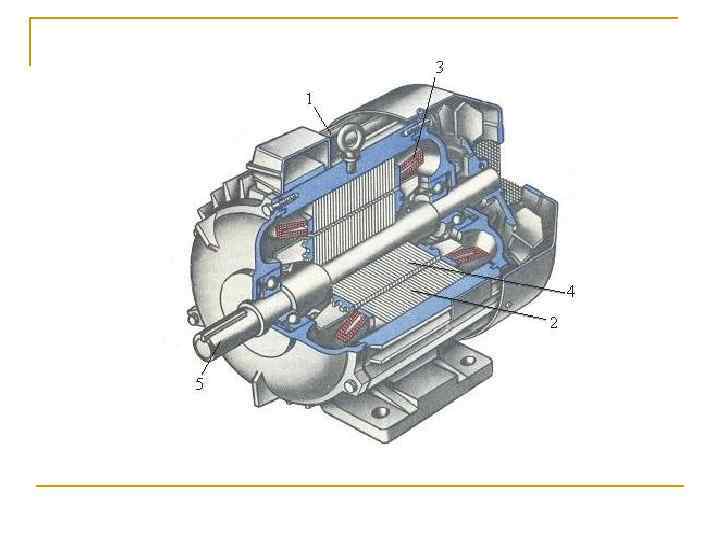
 Конструкция короткозамкнутого ротора
Конструкция короткозамкнутого ротора
 Конструкция
Конструкция
 Вращающееся магнитное поле А Y Z В С Х
Вращающееся магнитное поле А Y Z В С Х
 Каждый ток создаёт пульсирующее магнитное поле: n Результирующее магнитное поле:
Каждый ток создаёт пульсирующее магнитное поле: n Результирующее магнитное поле:

 В момент времени t=0 А Y . + Z S N . + С Х В
В момент времени t=0 А Y . + Z S N . + С Х В
 В момент времени t 1
В момент времени t 1
 В момент времени t 1 А + N + . С + . Y Z В S . Х
В момент времени t 1 А + N + . С + . Y Z В S . Х
 В момент времени t 2
В момент времени t 2
 В момент времени t 2 N А + Y Z + . С В . Х S
В момент времени t 2 N А + Y Z + . С В . Х S
 В момент времени t 3 N А + Z Y + + . . С В . Х S
В момент времени t 3 N А + Z Y + + . . С В . Х S
 В момент времени t 3
В момент времени t 3
 N N А А + + N . ZZ + + Y Y + S N . В . . С С + С С . . В Х Х S S S
N N А А + + N . ZZ + + Y Y + S N . В . . С С + С С . . В Х Х S S S
 +
+
 n Принцип действия
n Принцип действия
 n Скольжение 0
n Скольжение 0
 Принцип саморегулирования АД Если нагрузка на валу увеличилась, то МС Это приведет к n 2 и S Увеличение S вызывает Е 2 I 2 Мвр До тех пор пока Увеличение нагрузки вызывает увеличение его скольжения
Принцип саморегулирования АД Если нагрузка на валу увеличилась, то МС Это приведет к n 2 и S Увеличение S вызывает Е 2 I 2 Мвр До тех пор пока Увеличение нагрузки вызывает увеличение его скольжения
 Энергетическая диаграмма Р 1 РЭЛ 1 РЭМ статора РМГ РЭЛ 2 РМЕХ РДОБ Р 2
Энергетическая диаграмма Р 1 РЭЛ 1 РЭМ статора РМГ РЭЛ 2 РМЕХ РДОБ Р 2
 Пуск АД n 1. Прямой пуск
Пуск АД n 1. Прямой пуск
 n 2. Реакторный пуск
n 2. Реакторный пуск
 n 3. Автотрансформаторный пуск
n 3. Автотрансформаторный пуск
 n 4. Переключение обмоток статора со схемы соединения «звезда» на «треугольник»
n 4. Переключение обмоток статора со схемы соединения «звезда» на «треугольник»
 n 5. Пуск АД с фазным ротором с помощью пускового реостата
n 5. Пуск АД с фазным ротором с помощью пускового реостата
 Механическая характеристика асинхронного двигателя - это зависимость частоты вращения ротора от электромагнитного момента n = f(M). т. 1 – идеальный холостой ход (n=n 0, М=0); т. 2 – номинальный режим (М=Мн, n=nн); т. 3 – критический режим (М=Мкр, n=nн); т. 4 – соответствует пусковому моменту двигателя (М=Мпуск, n=0).
Механическая характеристика асинхронного двигателя - это зависимость частоты вращения ротора от электромагнитного момента n = f(M). т. 1 – идеальный холостой ход (n=n 0, М=0); т. 2 – номинальный режим (М=Мн, n=nн); т. 3 – критический режим (М=Мкр, n=nн); т. 4 – соответствует пусковому моменту двигателя (М=Мпуск, n=0).
 Искусственные механические характеристики При разной величине подведенного напряжения: При разной величине активного сопротивления ротора:
Искусственные механические характеристики При разной величине подведенного напряжения: При разной величине активного сопротивления ротора:
 Регулирование частоты вращения асинхронных двигателей Из уравнения следует, что частота вращения вала n зависит от скольжения S, числа пар полюсов p и частоты источника питания f. Следовательно можно выделить три способа изменения частоты вращения вала асинхронного двигателя: 1. Изменением скольжения; 2. Изменением числа пар полюсов; 3. Изменением частоты источника питания.
Регулирование частоты вращения асинхронных двигателей Из уравнения следует, что частота вращения вала n зависит от скольжения S, числа пар полюсов p и частоты источника питания f. Следовательно можно выделить три способа изменения частоты вращения вала асинхронного двигателя: 1. Изменением скольжения; 2. Изменением числа пар полюсов; 3. Изменением частоты источника питания.
 Изменение скольжения Rр3>Rр2>Rр1, Rр1=0
Изменение скольжения Rр3>Rр2>Rр1, Rр1=0
 Изменение числа пар полюсов Соединение полуобмоток статора: Параллельное Последовательное Если подводимое напряжение изменять: Если подводимое напряжение не изменять:
Изменение числа пар полюсов Соединение полуобмоток статора: Параллельное Последовательное Если подводимое напряжение изменять: Если подводимое напряжение не изменять:
 Изменение частоты источника питания При выполнении кривые: получим следующие
Изменение частоты источника питания При выполнении кривые: получим следующие
 Тормозные режимы асинхронных машин n n n генераторное торможение; динамическое торможение; торможение противовключением.
Тормозные режимы асинхронных машин n n n генераторное торможение; динамическое торможение; торможение противовключением.
 б) Механические характеристики при генераторном торможении за счет опускания груза (а)") Генераторное торможение а) б) Механические характеристики при генераторном торможении за счет опускания груза (а) и понижении частоты источника питания (б).
Генераторное торможение а) б) Механические характеристики при генераторном торможении за счет опускания груза (а) и понижении частоты источника питания (б).
 Динамическое торможение Схемы включения асинхронного двигателя и механические характеристики при динамическом торможении.
Динамическое торможение Схемы включения асинхронного двигателя и механические характеристики при динамическом торможении.
 и обратного") Торможение противовключением Механические характеристики асинхронного двигателя при торможении противовключении для прямого (1) и обратного (2) порядка чередования фаз.
Торможение противовключением Механические характеристики асинхронного двигателя при торможении противовключении для прямого (1) и обратного (2) порядка чередования фаз.
 Упрощенная формула Клосса n На основании каталожных данных и формулы Клосса можно построить механическую характеристику
Упрощенная формула Клосса n На основании каталожных данных и формулы Клосса можно построить механическую характеристику