Лекция 6.ppt572219871.ppt
- Количество слайдов: 51
 Лекция № 6 ДИНАМИКА ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 1. Динамика вращательного движения относительно точки. 2. Динамика вращательного движения относительно неподвижной оси. 3. Расчет моментов инерции некоторых простых тел. Теорема Гюйгенса-Штейнера. 4. Закон сохранения момента импульса. 5. Физический маятник. 6. Произвольное движение твердого тела. 7. Скатывание цилиндра с наклонной плоскости. 8. Сходство и различие линейных и угловых характеристик движения. .
Лекция № 6 ДИНАМИКА ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 1. Динамика вращательного движения относительно точки. 2. Динамика вращательного движения относительно неподвижной оси. 3. Расчет моментов инерции некоторых простых тел. Теорема Гюйгенса-Штейнера. 4. Закон сохранения момента импульса. 5. Физический маятник. 6. Произвольное движение твердого тела. 7. Скатывание цилиндра с наклонной плоскости. 8. Сходство и различие линейных и угловых характеристик движения. .
 Динамика вращательного движения твердого тела относительно точки Абсолютно твердое тело – это система материальных точек, расстояния между которыми сохраняются независимо от внешних воздействий. Иными словами в твердом теле отсутствует относительное движение этих точек. Рассмотрим твердое тело, как некую систему (рис. ), состоящую из n центра точек (m 1 m 2 … mn); – радиус-вектор i-ой точки, проведенный из точки О – неподвижной инерциальной системы отсчета. Введем обозначения: - внешняя сила, действующая на i-ю точку, - сила, действующая со стороны k-ой точки на i-ую точку
Динамика вращательного движения твердого тела относительно точки Абсолютно твердое тело – это система материальных точек, расстояния между которыми сохраняются независимо от внешних воздействий. Иными словами в твердом теле отсутствует относительное движение этих точек. Рассмотрим твердое тело, как некую систему (рис. ), состоящую из n центра точек (m 1 m 2 … mn); – радиус-вектор i-ой точки, проведенный из точки О – неподвижной инерциальной системы отсчета. Введем обозначения: - внешняя сила, действующая на i-ю точку, - сила, действующая со стороны k-ой точки на i-ую точку
 Запишем основное уравнение динамики для точки: Умножим обе части векторно на Знак производной можно вынести за знак векторного произведения (и знак суммы тоже), тогда:
Запишем основное уравнение динамики для точки: Умножим обе части векторно на Знак производной можно вынести за знак векторного произведения (и знак суммы тоже), тогда:
 Векторное произведение точки на её импульс называется моментом импульса этой точки относительно точки О: Эти три вектора образуют правую тройку векторов, связанных «правилом буравчика» : при вкручивании буравчика в результате повороте шляпки буравчика от вектора к вектору направление движения винта указывает направление вектора
Векторное произведение точки на её импульс называется моментом импульса этой точки относительно точки О: Эти три вектора образуют правую тройку векторов, связанных «правилом буравчика» : при вкручивании буравчика в результате повороте шляпки буравчика от вектора к вектору направление движения винта указывает направление вектора
 Векторное произведение , проведенного в точку приложения силы, на эту силу называется моментом силы: По определению, модуль векторного произведения равен: Обозначим – плечо силы (перпендикуляр, опущенный из неподвижной точки О на линию действия силы). Тогда:
Векторное произведение , проведенного в точку приложения силы, на эту силу называется моментом силы: По определению, модуль векторного произведения равен: Обозначим – плечо силы (перпендикуляр, опущенный из неподвижной точки О на линию действия силы). Тогда:
 C учетом новых обозначений: Запишем систему n уравнений для всех точек системы и сложим, левые и правые части уравнений: Так как , то
C учетом новых обозначений: Запишем систему n уравнений для всех точек системы и сложим, левые и правые части уравнений: Так как , то
 Вынесем знак производной за знак суммы здесь - суммарный момент импульса системы. Обозначим - результирующий момент всех внешних сил относительно неподвижной точки О. Окончательно получим:
Вынесем знак производной за знак суммы здесь - суммарный момент импульса системы. Обозначим - результирующий момент всех внешних сил относительно неподвижной точки О. Окончательно получим:
 Уравнение моментов относительно неподвижной точки Основной закон динамики движения твердого тела, вращающегося вокруг неподвижной точки. Внешнее сходство с уравнением динамики для Поступательного движения: Это векторное уравнение можно представить в скалярном виде , если спроецировать и на оси координат x, y, z: Написанные уравнения – уравнения моментов относительно неподвижных осей.
Уравнение моментов относительно неподвижной точки Основной закон динамики движения твердого тела, вращающегося вокруг неподвижной точки. Внешнее сходство с уравнением динамики для Поступательного движения: Это векторное уравнение можно представить в скалярном виде , если спроецировать и на оси координат x, y, z: Написанные уравнения – уравнения моментов относительно неподвижных осей.
 Или
Или
 Динамика вращательного движения твердого тела относительно неподвижной оси При вращении твёрдого тела относительно неподвижной оси, все точки тела движутся по плоским круговым траекториям. Выделим частицу mi тела, вращающегося вокруг оси z. Положение частицы зададим радиусвектором относительно произвольного центра О, лежащего на оси вращения. радиус окружности, по которой движется рассматриваемая точка. Момент импульса и момент силы направлены по оси z Уравнение моментов относительно неподвижной оси:
Динамика вращательного движения твердого тела относительно неподвижной оси При вращении твёрдого тела относительно неподвижной оси, все точки тела движутся по плоским круговым траекториям. Выделим частицу mi тела, вращающегося вокруг оси z. Положение частицы зададим радиусвектором относительно произвольного центра О, лежащего на оси вращения. радиус окружности, по которой движется рассматриваемая точка. Момент импульса и момент силы направлены по оси z Уравнение моментов относительно неподвижной оси:
 Кинематические характеристики При вращении материальной точки по окружности ее положение удобно описывать радиусом-вектором, проведенным из центра окружности, и углом , который образуется между первоначальным и конечным положением радиуса-вектора. Направление вектора определяется “правилом буравчика “ : при вкручивании буравчика в результате поворота его шляпки по направлению вращения МТ направление движения винта указывает направление вектора. Угловые скорость и ускорение определяются выражениями: и
Кинематические характеристики При вращении материальной точки по окружности ее положение удобно описывать радиусом-вектором, проведенным из центра окружности, и углом , который образуется между первоначальным и конечным положением радиуса-вектора. Направление вектора определяется “правилом буравчика “ : при вкручивании буравчика в результате поворота его шляпки по направлению вращения МТ направление движения винта указывает направление вектора. Угловые скорость и ускорение определяются выражениями: и
 Векторы линейной скорости связаны соотношением: и угловой скорости а их модули соотношением:
Векторы линейной скорости связаны соотношением: и угловой скорости а их модули соотношением:
 У всех точек разная, а угловая скорость одинаковая , причем их модули связаны соотношением: Тогда уравнение моментов имеет вид: Так как тело абсолютно твердое, то в процессе вращения mi и Ri останутся неизменными. После преобразования получаем:
У всех точек разная, а угловая скорость одинаковая , причем их модули связаны соотношением: Тогда уравнение моментов имеет вид: Так как тело абсолютно твердое, то в процессе вращения mi и Ri останутся неизменными. После преобразования получаем:
 Обозначим – момент инерции точки, находящейся на расстоянии R от оси вращения: Так как тело состоит из огромного количества точек и все они находятся на разных расстояниях от оси вращения, то момент инерции тела равен: где R – расстояние от оси z до dm. Как видно, момент инерции I – величина скалярная и аддитивная. Для случая системы тел:
Обозначим – момент инерции точки, находящейся на расстоянии R от оси вращения: Так как тело состоит из огромного количества точек и все они находятся на разных расстояниях от оси вращения, то момент инерции тела равен: где R – расстояние от оси z до dm. Как видно, момент инерции I – величина скалярная и аддитивная. Для случая системы тел:
 Просуммировав уравнения по всем i-ым точкам, получим или Это основное уравнение динамики тела вращающегося вокруг неподвижной оси. (Сравним: – основное уравнение динамики поступательного движения тела).
Просуммировав уравнения по всем i-ым точкам, получим или Это основное уравнение динамики тела вращающегося вокруг неподвижной оси. (Сравним: – основное уравнение динамики поступательного движения тела).
.") И так, – момент импульса тела, вращающегося вокруг оси z (Сравним: для поступательного движения). При этом помним, что и динамические характеристики вращательного движения, направленные всегда вдоль оси вращения. Причем направление определяется направлением вращения, как и , а направление – зависит от того, ускоряется или замедляется вращение.
И так, – момент импульса тела, вращающегося вокруг оси z (Сравним: для поступательного движения). При этом помним, что и динамические характеристики вращательного движения, направленные всегда вдоль оси вращения. Причем направление определяется направлением вращения, как и , а направление – зависит от того, ускоряется или замедляется вращение.
 Повторим основные характеристики вращательного движения Эти формулы получены для одной точки вращающегося твердого тела Момент импульса Момент силы Момент инерции Суммируя по всему телу, получим Момент импульса твердого тела Момент силы твердого тела Момент инерции твердого тела Основной закон динамики вращательного движения твердого тела Z L i| z ω K ri Mi
Повторим основные характеристики вращательного движения Эти формулы получены для одной точки вращающегося твердого тела Момент импульса Момент силы Момент инерции Суммируя по всему телу, получим Момент импульса твердого тела Момент силы твердого тела Момент инерции твердого тела Основной закон динамики вращательного движения твердого тела Z L i| z ω K ri Mi
 Расчет моментов инерции некоторых простых тел. В качестве примера вычислим момент инерции тонкого однородного стержня относительно оси z, проходящей через его центр масс — точку С. Длина стержня — l, его масса — M. На расстоянии x от оси вращения выделим элемент dx, масса которого Z’ Момент инерции этой частицы стержня равен: Z X C 0’ x dx X’
Расчет моментов инерции некоторых простых тел. В качестве примера вычислим момент инерции тонкого однородного стержня относительно оси z, проходящей через его центр масс — точку С. Длина стержня — l, его масса — M. На расстоянии x от оси вращения выделим элемент dx, масса которого Z’ Момент инерции этой частицы стержня равен: Z X C 0’ x dx X’
 Вычислив подобным образом, моменты инерции всех элементов стержня, сложим их, взяв интеграл: получаем Моменты инерции некоторых тел
Вычислив подобным образом, моменты инерции всех элементов стержня, сложим их, взяв интеграл: получаем Моменты инерции некоторых тел
 Теорема Гюйгенса-Штейнера При вычислении момента инерции тела, вращающегося вокруг оси, не проходящей через центр инерции, следует пользоваться теоремой о параллельном переносе осей или теоремой Гюйгенса - Штейнера : Момент инерции тела относительно произвольной оси (I) равен сумме момента инерции Ic относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела М на квадрат расстояния между осями: I = Ic + Ma 2
Теорема Гюйгенса-Штейнера При вычислении момента инерции тела, вращающегося вокруг оси, не проходящей через центр инерции, следует пользоваться теоремой о параллельном переносе осей или теоремой Гюйгенса - Штейнера : Момент инерции тела относительно произвольной оси (I) равен сумме момента инерции Ic относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела М на квадрат расстояния между осями: I = Ic + Ma 2
.") Пример: стержень массой m, длиной l, вращается вокруг оси, проходящей через конец стержня (рис).
Пример: стержень массой m, длиной l, вращается вокруг оси, проходящей через конец стержня (рис).
 Закон сохранения момента импульса Вернемся ещё раз к уравнению моментов в виде: Оно в равной степени справедливо как для твердого тела, так и для системы тел. Если момент внешних сил относительно оси z равен нулю, то момент импульса системы относительно этой же оси будет оставаться постоянным. Это закон сохранения момента импульса — аналог закона сохранения импульса замкнутой системы.
Закон сохранения момента импульса Вернемся ещё раз к уравнению моментов в виде: Оно в равной степени справедливо как для твердого тела, так и для системы тел. Если момент внешних сил относительно оси z равен нулю, то момент импульса системы относительно этой же оси будет оставаться постоянным. Это закон сохранения момента импульса — аналог закона сохранения импульса замкнутой системы.
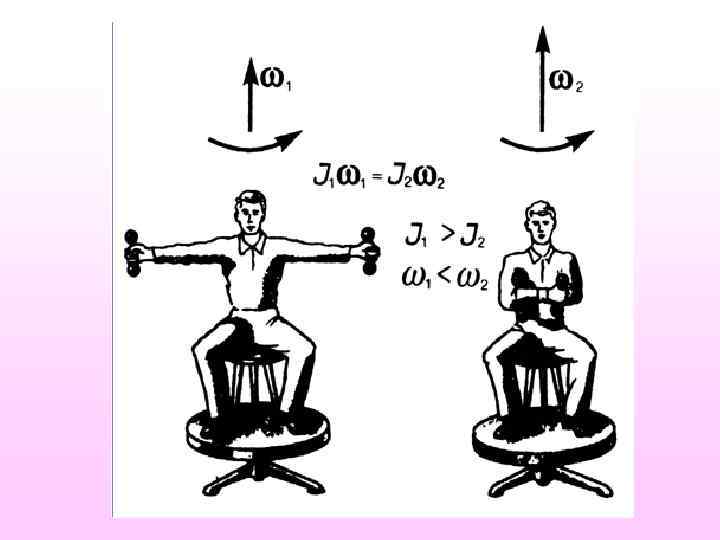
, то это не означает постоянства угловой скорости:") Если не меняется момент импульса тела (Lz), то это не означает постоянства угловой скорости: Изменение момента инерции вращающегося тела приведёт к изменению его угловой скорости даже в случае отсутствия внешних вращающих моментов. При этом сохранится неизменным произведение Iz = сonst, то есть угловая скорость окажется обратно пропорциональной моменту инерции тела (системы): Известно много примеров, иллюстрирующих эту особенность закона сохранения момента импульса: вращение фигуристов и балерин, опыты на скамье Жуковского и т. п.
Если не меняется момент импульса тела (Lz), то это не означает постоянства угловой скорости: Изменение момента инерции вращающегося тела приведёт к изменению его угловой скорости даже в случае отсутствия внешних вращающих моментов. При этом сохранится неизменным произведение Iz = сonst, то есть угловая скорость окажется обратно пропорциональной моменту инерции тела (системы): Известно много примеров, иллюстрирующих эту особенность закона сохранения момента импульса: вращение фигуристов и балерин, опыты на скамье Жуковского и т. п.
 Кинетическая энергия твердого тела Вычислим кинетическую энергию К тела, вращающегося вокруг неподвижной оси z с угловой скоростью , суммируя кинетические энергии бесконечно малых элементов тела где – момент инерции тела относительно оси вращения тела, - линейная скорость элемента тела с массой.
Кинетическая энергия твердого тела Вычислим кинетическую энергию К тела, вращающегося вокруг неподвижной оси z с угловой скоростью , суммируя кинетические энергии бесконечно малых элементов тела где – момент инерции тела относительно оси вращения тела, - линейная скорость элемента тела с массой.
 Физический маятник Применим уравнение моментов относительно неподвижной оси для описания движения физического маятника. Физическим маятником называется твердое тело, которое может свободно вращаться вокруг горизонтальной оси, не проходящей через центр масс O этого тела, под действием силы тяжести.
Физический маятник Применим уравнение моментов относительно неподвижной оси для описания движения физического маятника. Физическим маятником называется твердое тело, которое может свободно вращаться вокруг горизонтальной оси, не проходящей через центр масс O этого тела, под действием силы тяжести.
 О – точка подвеса тела, лежащая на оси вращения Z. В точке подвеса приложена сила реакции опоры. Отрезок прямой ОО’, имеющий длину а, вместе с вектором , приложенным в центре масс тела O’, лежит в плоскости, перпендикулярной оси Z. Прямая АА’ - вертикаль. Угол между вертикалью и отрезком ОО’ однозначно определяет положение тела в пространстве.
О – точка подвеса тела, лежащая на оси вращения Z. В точке подвеса приложена сила реакции опоры. Отрезок прямой ОО’, имеющий длину а, вместе с вектором , приложенным в центре масс тела O’, лежит в плоскости, перпендикулярной оси Z. Прямая АА’ - вертикаль. Угол между вертикалью и отрезком ОО’ однозначно определяет положение тела в пространстве.
 Физический маятник имеет устойчивое положение равновесия при , где сила реакции опоры и сила тяжести направлены вдоль вертикали AA’ и уравновешивают друга: В этом положении вектор проходят через ось вращения и поэтому их моменты относительно данной оси равны 0. и
Физический маятник имеет устойчивое положение равновесия при , где сила реакции опоры и сила тяжести направлены вдоль вертикали AA’ и уравновешивают друга: В этом положении вектор проходят через ось вращения и поэтому их моменты относительно данной оси равны 0. и
 В случае отклонения маятника от устойчивого положения равновесия на некоторый угол сила тяжести создает возвращающий момент: стремящийся вернуть маятник в исходное положение равновесия. В области малых углов отклонения, где измеряется в радианах, sin <<1, угол и тогда:
В случае отклонения маятника от устойчивого положения равновесия на некоторый угол сила тяжести создает возвращающий момент: стремящийся вернуть маятник в исходное положение равновесия. В области малых углов отклонения, где измеряется в радианах, sin <<1, угол и тогда:
 Тогда для малых углов отклонения уравнение моментов относительно оси вращения для физического маятника принимает вид: Это есть уравнение движение физического маятника, которое может быть записано в стандартной форме где - круговая частота собственных колебаний физического маятника - момент инерции маятника относительно оси Z.
Тогда для малых углов отклонения уравнение моментов относительно оси вращения для физического маятника принимает вид: Это есть уравнение движение физического маятника, которое может быть записано в стандартной форме где - круговая частота собственных колебаний физического маятника - момент инерции маятника относительно оси Z.
 Решение уравнения движения физического маятника записывается следующим образом : где постоянные и находятся с помощью двух начальных условий (при t = 0): Таким образом, при малых углах отклонения от устойчивого равновесия движение физического маятника представляет собой гармонические колебания.
Решение уравнения движения физического маятника записывается следующим образом : где постоянные и находятся с помощью двух начальных условий (при t = 0): Таким образом, при малых углах отклонения от устойчивого равновесия движение физического маятника представляет собой гармонические колебания.
 Полная механическая энергия E физического маятника складывается из кинетической энергии K его вращательного движения вокруг оси Z и потенциальной энергии U, связанной с силой тяжести и определяемой высотой h, на которой находится центр масс O’ маятника: Высота h обычно отсчитывается от наиболее низкого положения центра масс маятника, поэтому
Полная механическая энергия E физического маятника складывается из кинетической энергии K его вращательного движения вокруг оси Z и потенциальной энергии U, связанной с силой тяжести и определяемой высотой h, на которой находится центр масс O’ маятника: Высота h обычно отсчитывается от наиболее низкого положения центра масс маятника, поэтому
 Если не учитывать действие сил трения, полная механическая энергия маятника сохраняется постоянной и равной энергии которая определяется начальными условиями.
Если не учитывать действие сил трения, полная механическая энергия маятника сохраняется постоянной и равной энергии которая определяется начальными условиями.
 Произвольное движение твердого тела. Рассмотрим одно из простых движений абсолютно твердого тела – плоское движение. Это движение , при котором все точки тела остаются в параллельных плоскостях. Примером такого движения является качение цилиндра по горизонтальной или наклонной плоскостям. Пусть тело движется под действием некоторой системы внешних сил. Эту систему внешних сил можно всегда привести к центру масс тела О и заменить результирующей силой , приложенной в точке О, и суммарным моментом внешних сил относительно этой же точки
Произвольное движение твердого тела. Рассмотрим одно из простых движений абсолютно твердого тела – плоское движение. Это движение , при котором все точки тела остаются в параллельных плоскостях. Примером такого движения является качение цилиндра по горизонтальной или наклонной плоскостям. Пусть тело движется под действием некоторой системы внешних сил. Эту систему внешних сил можно всегда привести к центру масс тела О и заменить результирующей силой , приложенной в точке О, и суммарным моментом внешних сил относительно этой же точки
 В результате полная система уравнений, описывающая произвольное движение абсолютно твердого тела, принимает вид: где m - масса тела - скорость движения центра масс тела и - момент импульса тела относительно его центра масс. Здесь необходимо отметить, что уравнение моментов относительно движущегося центра масс по своей форме совпадает с уравнением моментов относительно неподвижной точки.
В результате полная система уравнений, описывающая произвольное движение абсолютно твердого тела, принимает вид: где m - масса тела - скорость движения центра масс тела и - момент импульса тела относительно его центра масс. Здесь необходимо отметить, что уравнение моментов относительно движущегося центра масс по своей форме совпадает с уравнением моментов относительно неподвижной точки.
 Кинетическая энергия твердого тела, совершающего поступательное движение со и вращательное скоростью движения центра масс движение с угловой скоростью описывается выражением: Здесь I 0 – момент инерции относительно мгновенной оси вращения, проходящей через центр инерции.
Кинетическая энергия твердого тела, совершающего поступательное движение со и вращательное скоростью движения центра масс движение с угловой скоростью описывается выражением: Здесь I 0 – момент инерции относительно мгновенной оси вращения, проходящей через центр инерции.
 Условия равновесия абсолютно твердого тела включают два динамических условия которые вытекают из уравнений движения, и два кинематических условия
Условия равновесия абсолютно твердого тела включают два динамических условия которые вытекают из уравнений движения, и два кинематических условия
 Скатывании цилиндра с наклонной плоскости. Y Сплошной цилиндр 1 массы m и радиуса R скатывается без проскальзывания с C 2 наклонной H плоскости. Угол наклона плоскости – X , а высота Н (Н » R). Начальная скорость цилиндра равна нулю. Определим время скатывания — t и скорость центра масс цилиндра у основания наклонной плоскости.
Скатывании цилиндра с наклонной плоскости. Y Сплошной цилиндр 1 массы m и радиуса R скатывается без проскальзывания с C 2 наклонной H плоскости. Угол наклона плоскости – X , а высота Н (Н » R). Начальная скорость цилиндра равна нулю. Определим время скатывания — t и скорость центра масс цилиндра у основания наклонной плоскости.
 При качении цилиндра на него действуют три силы: сила тяжести Y 1 C 2 H упругая сила реакции опоры и сила трения покоя , т. к. качение X без проскальзывания Представим это движение суммой двух движений: поступательного со скоростью VC , с которой движется ось цилиндра, и вращательного вокруг оси цилиндра с угловой скоростью .
При качении цилиндра на него действуют три силы: сила тяжести Y 1 C 2 H упругая сила реакции опоры и сила трения покоя , т. к. качение X без проскальзывания Представим это движение суммой двух движений: поступательного со скоростью VC , с которой движется ось цилиндра, и вращательного вокруг оси цилиндра с угловой скоростью .
 Из условия «движение без проскальзывания» имеем связь между угловой скорость и скоростью центра масс: Продифференцировав это уравнение по времени, получим соотношение для ускорений: или Воспользовавшись теоремой о движении центра масс, опишем поступательное движение цилиндра:
Из условия «движение без проскальзывания» имеем связь между угловой скорость и скоростью центра масс: Продифференцировав это уравнение по времени, получим соотношение для ускорений: или Воспользовавшись теоремой о движении центра масс, опишем поступательное движение цилиндра:
 Спроецировав уравнение на направления осей x и y, получим два скалярных уравнения: x: y: mg. Sin – Fтр = ma. C ; N – mgсos = 0. Для описания вращения воспользуемся основным уравнением динамики вращательного движения: MC = I C ( ) Из трёх названных сил момент относительно оси цилиндра создаёт только сила трения:
Спроецировав уравнение на направления осей x и y, получим два скалярных уравнения: x: y: mg. Sin – Fтр = ma. C ; N – mgсos = 0. Для описания вращения воспользуемся основным уравнением динамики вращательного движения: MC = I C ( ) Из трёх названных сил момент относительно оси цилиндра создаёт только сила трения:
 Учитывая всё это, уравнение моментов перепишем так: Решая совместно уравнения движение, получим следующие значения неизвестных величин: Из выражения для следует, что с увеличением угла наклона должна возрастать и сила трения покоя Fтр.
Учитывая всё это, уравнение моментов перепишем так: Решая совместно уравнения движение, получим следующие значения неизвестных величин: Из выражения для следует, что с увеличением угла наклона должна возрастать и сила трения покоя Fтр.
 Но, как известно, её рост ограничен предельным значением: Следовательно, должно выполняться неравенство: ⅓mg. Sin ≤ mg. Cos. Отсюда следует, что скатывание будет происходить без проскальзывания до тех пор, пока угол не превзойдёт значения пред: пред = arctg 3. Здесь — коэффициент трения цилиндра по плоскости.
Но, как известно, её рост ограничен предельным значением: Следовательно, должно выполняться неравенство: ⅓mg. Sin ≤ mg. Cos. Отсюда следует, что скатывание будет происходить без проскальзывания до тех пор, пока угол не превзойдёт значения пред: пред = arctg 3. Здесь — коэффициент трения цилиндра по плоскости.
 Линейное ускорение цилиндра величина неизменная, следовательно, поступательное движение цилиндра равноускоренное. При таком движении без начальной скорости цилиндр достигнет основания наклонной плоскости за время: длина наклонной , где плоскости Так как , то время скатывания:
Линейное ускорение цилиндра величина неизменная, следовательно, поступательное движение цилиндра равноускоренное. При таком движении без начальной скорости цилиндр достигнет основания наклонной плоскости за время: длина наклонной , где плоскости Так как , то время скатывания:
 Вычислим конечную скорость поступательного движения оси цилиндра: Заметим, что эту задачу можно решить проще, воспользовавшись законом сохранения механической энергии. В системе, правда, присутствует сила трения, но её работа равна нулю, поскольку точка приложения этой силы в процессе спуска остаётся неподвижной: ведь движение происходит без проскальзывания. Раз нет работы силы трения, механическая энергия системы не меняется.
Вычислим конечную скорость поступательного движения оси цилиндра: Заметим, что эту задачу можно решить проще, воспользовавшись законом сохранения механической энергии. В системе, правда, присутствует сила трения, но её работа равна нулю, поскольку точка приложения этой силы в процессе спуска остаётся неподвижной: ведь движение происходит без проскальзывания. Раз нет работы силы трения, механическая энергия системы не меняется.
 Рассмотрим энергию цилиндра в начальный момент — на высоте H и в конце спуска. Полная энергия цилиндра в этих положениях одинакова: Так как , а , получаем: Отсюда легко найдем конечную скорость цилиндра которая совпадает с полученной ранее.
Рассмотрим энергию цилиндра в начальный момент — на высоте H и в конце спуска. Полная энергия цилиндра в этих положениях одинакова: Так как , а , получаем: Отсюда легко найдем конечную скорость цилиндра которая совпадает с полученной ранее.
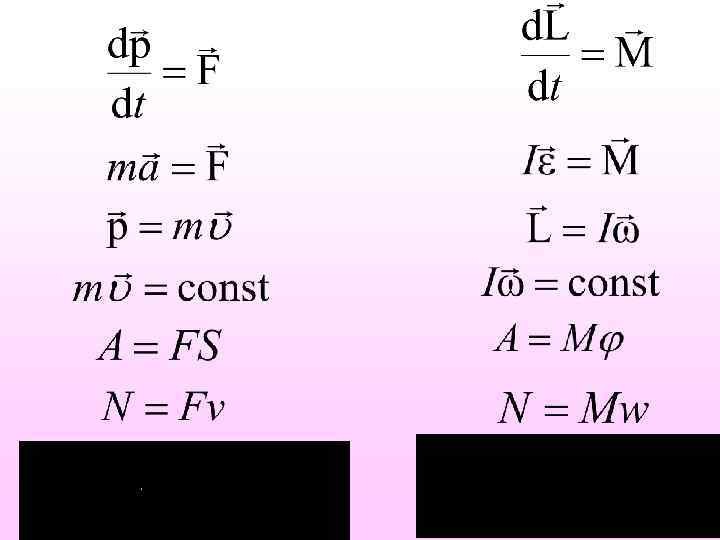
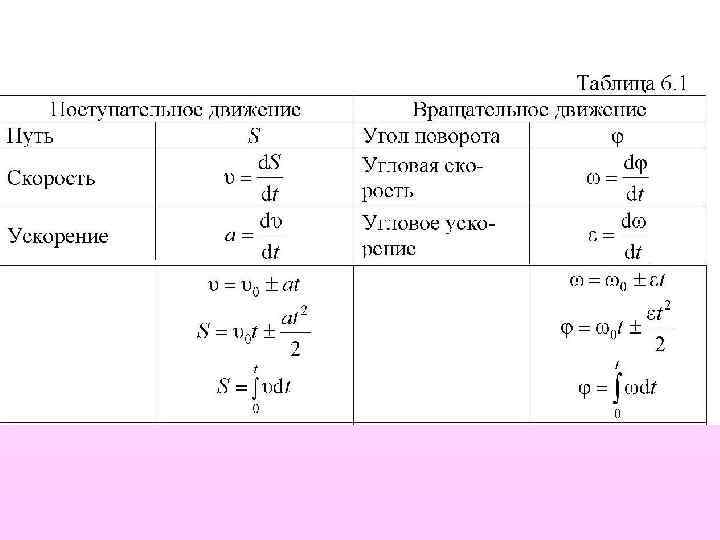
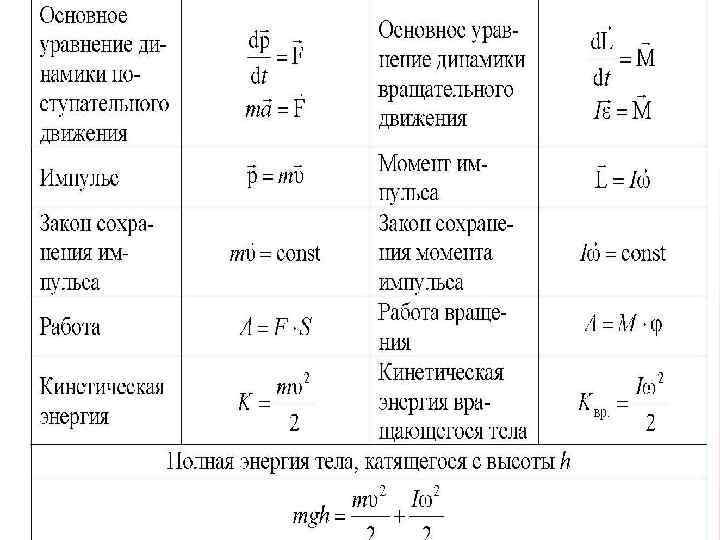
 Сходство и различие линейных и угловых характеристик движения Формулы кинематики и динамики вращательного движения легко запоминаются, если сопоставить их с формулами поступательного движения. Отмечу, что в приведенной ниже таблице рассмотрены случаи движения с постоянными ускорениями:
Сходство и различие линейных и угловых характеристик движения Формулы кинематики и динамики вращательного движения легко запоминаются, если сопоставить их с формулами поступательного движения. Отмечу, что в приведенной ниже таблице рассмотрены случаи движения с постоянными ускорениями:
 Поступательное движение Вращательное движение
Поступательное движение Вращательное движение