


ЛЕКЦИЯ № 4 2. 5. Обмотки машин постоянного тока Обмотка якоря Виток и Секция параллельная ветвь обмотки В простой петлевой обмотке параллельных ветвей столько, сколько пар полюсов в машине

Выводы: 1. Напряжение на зажимах ровно ЭДС параллельной ветви, а ЭДС параллельной ветви равно сумме ЭДС последовательно соединенных секций. 2. Секции каждой параллельной ветви равномерно распределены под всеми полюсами машины. 4. Для двухполюсной машины простая петлевая и простая волновая обмотки идентичны другу. 1. 5. Основные характеристики приводов Привод (двигатель, машина) оценивается статическими и динамическими характеристиками. Статические Динамические - статическая; - переходная ; - скоростная (расходная, регулировочная); - весовая или импульсная; - моментная и - частотные. - механические (нагрузочные, силовые, внешние)

2. 6. Рабочие и механические характеристики двигателей постоянного тока
 В ЭЛЕКТРОПРИВОДАХ СИСТЕМ УПРАВЛЕНИЯ ЛЕКЦИЯ № 5")
ТЕМА 2. ПРИНЦИПЫ ПОСТРОЕНИЯ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ (ДВИГАТЕЛЕЙ) В ЭЛЕКТРОПРИВОДАХ СИСТЕМ УПРАВЛЕНИЯ ЛЕКЦИЯ № 5 2. 7. Динамические характеристики двигателей постоянного тока На основании закона сохранения момента количества движения запишем уравнение вращения якоря ДПТ: , где Вращающий момент ДПТ или Основное уравнение ДПТ - уравнение второго закона Кирхгофа для цепи якоря (индуктивностью якоря вследствие малости пренебрегаем) При и момент ДПТ определяется как:
 характеристик ДПТ - пусковой момент, развиваемый двигателем при неподвижном якоре;")
Уравнение моментных (внешних ) характеристик ДПТ - пусковой момент, развиваемый двигателем при неподвижном якоре; - скорость идеального холостого хода, т. е. скорость двигателя при отсутствии каких-либо нагрузочных моментов. Подставим выражение момента ДПТ в уравнение вращения якоря при условии или в нормированном виде: - коэффициент усиления ДПТ; - постоянная времени ДПТ.
 является угол поворота или перемещение выходного звена")
Выходной величиной исполнительного механизма (двигателя с редуктором) является угол поворота или перемещение выходного звена - рулевого органа. Связь между скоростями вращения якоря двигателя и руля очевидна: передаточное редуктора. – отношение Дифференциальное уравнение ЭМРМ в угловых (или линейных) перемещениях выходного звена: , , Переходя в область преобразований Лапласа, получим передаточную функцию ЭМРМ: Постоянная времени ЭМРМ, как правило, значительно превосходит электромагнитные постоянные обмоток возбуждения и якоря, поэтому в ходе лабораторных исследований они не учитываются. Однако при моделировании приводов возникает необходимость учета этих величин и различных нелинейностей, свойственных ДПТ, поэтому в дальнейшем мы вернемся к вопросу создания модели привода постоянного тока и оценки его динамических особенностей.

Упрощенная схема замещения ДПТ независимого возбуждения Уравнения Кирхгофа для цепей обмоток возбуждения и якоря Полная система уравнений ДПТ: Структурная схема ДПТ Переходные процессы по скорости

2. 8. Пуск в ход и реверсирование двигателей постоянного тока Пусковой режим работы двигателя является переходным и продолжается от момента подключения к источнику электроэнергии до достижения постоянной частоты вращения. В зависимости от мощности двигателя, источники питания и характера нагрузки применяют следующие способы пуска : - прямое включение, - реостатный способ пуска и - пуск при пониженном напряжении. Прямое включение Обмотка якоря ДПТ включается непосредственно к источнику питания. В начальный момент времени ток якоря максимален или Происходит разгон якоря ДПТ, ЭДС увеличивается, а ток якоря и вращающий момент уменьшается до уровня момента сопротивления. При независимом возбуждении и ненасыщенной магнитной системе машины дифференциальное уравнение движения якоря ДПТ имеет вид:

или - электромеханическая постоянная времени ДПТ, Пуск ДПТ -частота вращения идеального холостого хода ДПТ, -снижение частоты вращения якоря из-за статической нагрузки. Ток якоря при пуске На практике часто требуется, чтобы постоянная времени была как можно меньше. Для авиационных электродвигателей постоянного тока Недостатки 1. Может вызывать в ДПТ круговой огонь. 2. Значительный пусковой момент вызывает ударные нагрузки. Применяют для двигателей мощностью не более 0, 7 -1, 0 к. Вт.

Реостатный пуск Пусковой ток якоря при полном сопротивлении пускового реостата значительно уменьшается Сопротивление пускового реостата обычно выбирают таким, чтобы самый большой пусковой ток превышал номинальный не более чем в 2 -3 раза. При этом увеличивается электромеханическая постоянная времени, уменьшается величина пускового момента и величина пускового тока якоря. Такой способ пуска применяется для мощных ДПТ при ограниченной мощности источников питания как один из этапов пуска, например для запуска авиационных газотурбинных двигателей от бортовых аккумуляторных батарей или от аэродромных передвижных агрегатов питания (АПА).

Пуск при пониженном напряжении Позволяет уменьшить величины пусковых токов и пусковых вращающих моментов без снижения динамических свойств двигателя (постоянная времени не зависит от питающего напряжения). Требуется отдельный источник электрической энергии с регулируемым выходным напряжением. Реверсирование ДПТ Наихудшие условия работы ДПТ возникают при необходимости скачкообразного изменения направления вращения (реверс двигателя). Изменение направления вращения ДПТ можно осуществить, если изменить - направление тока в обмотке якоря , - направление магнитного потока возбуждения (только для двигателей с электромагнитным возбуждением). На практике реверсирования двигателей осуществляется изменением направления тока в обмотке якоря ( путем переключения полярности питающего напряжения). Самый тяжелый режим при этом наблюдается тогда, когда время переключения полярности напряжения во много раз меньше электромеханической постоянной времени (такой режим называют иногда «реверсирование противовключением» ). Ток якоря будет близок к удвоенному значению пускового тока двигателя и примерно в 2 раза превышать номинальное значение. Такой способ реверса применяется в основном для машин малой мощности.

2. 9. Регулирование скорости и торможение двигателей постоянного тока Способы регулирования частоты вращения ДПТ: - изменением величины сопротивления в цепи якоря, - изменением величины магнитного потока, - изменением величины питающего напряжения. 2. 9. 1. Изменение величины дополнительного сопротивления Возможно только уменьшение частоты вращения при наличии нагрузки на валу двигателя (меняется только жесткость механической характеристики). Способ непригоден для регулирования частоты вращения мощных двигателей, поскольку существенно увеличиваются потери мощности на дополнительном сопротивлении в цепи якоря.

2. 9. 2. Изменение величины магнитного потока Последовательно с ОВ включают реостат, что приводит к уменьшению тока возбуждения и магнитного потока. При постоянном моменте нагрузки на валу это приводит к снижению ЭДС и резкому увеличению тока якоря, настолько значительному, что даже при уменьшившемся магнитном потоке , вращающий момент двигателя возрастает и частота вращения увеличивается. Максимум частоты вращения соответствует току 2. 9. 3. Изменение величины питающего напряжения Требуется специальный источник электрической энергии. Наибольшее распространение в наземной технике получила так называемая система “генератор - двигатель”, в которой управление напряжением осуществляется путем изменения напряжения на обмотке возбуждения генератора. Кроме того, в таких системах обычно предполагается вторая ступень регулирования путем воздействия на величину тока возбуждения двигателя.

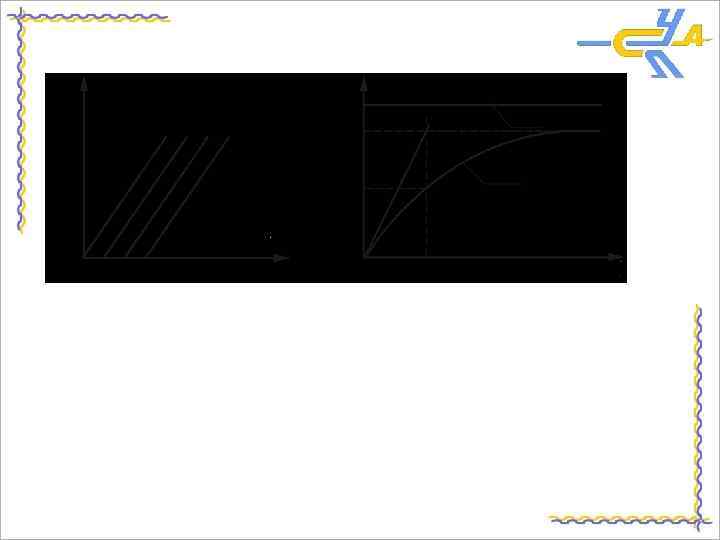
Уравнение для регулировочных характеристик может быть получено путем преобразования выражения: Регулировочные характеристики двигателя представляют собой параллельные прямые линии, смещенные относительно друга на расстояние, определяемое величиной момента нагрузки.

Торможение ДПТ В эксплуатации нашли применение следующие способы торможения двигателей: - генераторное ( с отдачей электроэнергии в сеть), - динамическое (с гашением выработанной энергии в реостате), - противовключение (электромагнитное, выполняется путем переключения проводов, подводящих ток к обмотке якоря ). Генераторное возникает в случае, когда ДПТ приводится во вращение с частотой, большей частоты вращения холостого хода, машина переходит в генераторный режим, отдает энергию в сеть (рекуперирует) и оказывает тормозящее действие на двигатель. Перевод двигателя в этот режим возможен при увеличении магнитного потока (за счет резкого увеличения тока возбуждения). Недостатком метода является невозможность полного торможения. Динамическое Противовключение проводится с помощью отключения обмотки якоря от сети и подключения ее с помощью ключа S 1 к некоторому балластному сопротивлению. выполняется путем переключения проводов, подводящих ток к обмотке якоря. Недостатком является снижение тормозного момента при уменьшении частоты вращения. Невыгоден, так как машина потребляет как механическую, так и электрическую энергию.

Механическая характеристика ДПТ

Вывод Электродвигатели постоянного тока в зависимости от схемы их включения могут иметь различные рабочие и механические характеристики. В тех случаях, когда требуется высокая стабильность частоты вращения при изменении нагрузки в значительном диапазоне, целесообразно применять двигатели с параллельным возбуждением. В случае, когда требуются большие пусковые моменты, выбор должен быть сделан в пользу двигателей с последовательным возбуждением.