Лекция 3 (АЦП и ЦАП).ppt
- Количество слайдов: 28



ЛЕКЦИЯ 3: «Аналого-цифровое и цифро- аналоговое преобразования» 1. Аналого цифровое преобразование речевого сигнала. 1. 1. Дискретизация по времени и квантование по уровню. 1. 2. Кодирование линейных сигналов 2. Цифро аналоговое преобразование речевого сигнала. 3. Цифровые форматы представления сигналов в ТКС.
 по направляющей системе")
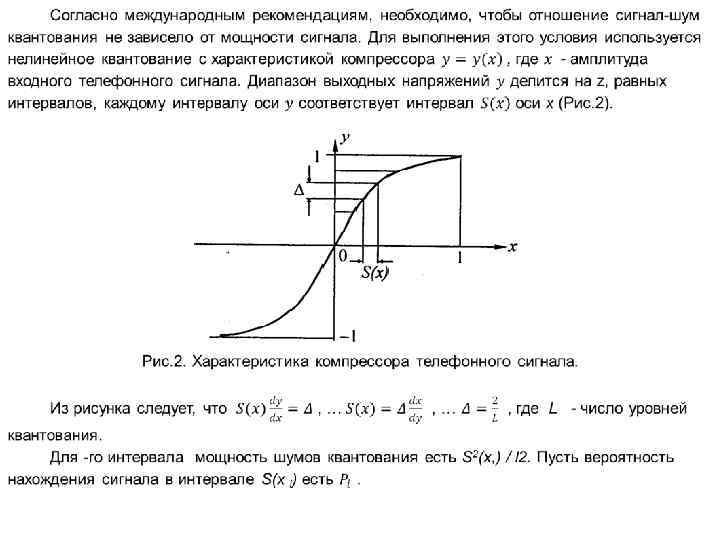
1. Аналого цифровое преобразование речевого сигнала. В аналоговых системах передачи (АСП) по направляющей системе (линии связи) передается аналоговый сигнал (групповой), который непрерывен во времени и может принимать любое значение из некоторого определенного диапазона значений (динамического диапазона). В цифровых системах передачи (ЦСП) по линии передается групповой цифровой сигнал, который представляет собой последовательность импульсов. При этом амплитуда их постоянна или может принимать ряд дискретных, известных заранее значений. Процесс замены аналоговых сетей телекоммуникаций на цифровые называется цифровизацией. Этот про цесс связан с большими материальными затратами, поэтому он проводит сяпостепенно. В разных странах применяют различные способы реализа ции этого направления. В одних сначала «цифровизируют» магистральные сети, включая крупные сетевые узлы коммутации, временно сохраняя зоно вую и местную аналоговую сети. В других странах, наоборот, сначала созда ют «цифровые острова» местные цифровые сети и цифровые узлы комму тации (электронные АТС), сохраняя на зоновой и магистральной сети аналоговые системы передачи. В настоящее время практически во всех странах на сетях связи сосуществуют АСП и ЦСП, хотя ведущей тенден циейявляется полный перевод всех сетей на ЦСП. Это обусловлено следующими основными причинами: 1) Наличие линий связи, которые не могут обеспечить высокое качество передачи; 2) Значительная стоимость эксплуатации АСП; 3) Необходимость использования цифровых систем коммутации (ЦСК). Сигнал при переходе из аналоговой формы в цифровую претерпевает сле дующие преобразования: 1). Дискретизация во времени; 2). Квантование по уровню; 3). Кодирование; 4). Временное уплотнение.

Напомним, что для преобразования аналогового сигнала в цифровой используются следующие операции: ДИСКРЕТИЗАЦИЯ, КВАНТОВАНИЕ и КОДИРОВАНИЕ. Дискретизация осуществляется на основе теоремы Котельникова. Для сигналов тональной частоты (ТЧ) стандартом предусмотрена полоса частот передачи, лежащая в пределах 0, 3 ÷ 3, 4 к. Гц + 0, 9 к. Гц, где 0, 9 к. Гц защитный интервал, необходимый для того, чтобы из за нестабильности частот задающих генераторов при формировании многоканального группового сигнала с частотным разделением каналов спектры соседних по частоте каналов ТЧ не перекрывались и не возникали междуканальные помехи. Следовательно, верхняя частота канала ТЧ составляет fв = 4 к. Гц. Тактовая частота дискретизации сигналов в каналах ТЧ в соответствии с теоремой Котельникова должна быть не менее fт = 2 fв = 8 к. Гц. Каждый дискретный отсчёт сигнала (по стандарту) должен передаваться 8 битами унитарного (последовательного двоичного) кода. Поэтому сигнал ТЧ нужно передавать по каналу ТЧ со скоростью fт × 8 бит = 8× 103 × 8 = 64 кбит/с. Это и есть скорость передачи информации (данных в цифровом виде) по одному каналу ТЧ. Отсчёты сигнала ТЧ кодируются восьмиразрядными двоичными числами, которые формируются по результатам квантования выборочных значений (отсчётов) непрерывного сигнала. Поскольку операция квантования предполагает формирование отсчетов сигнала с конечным числом уровней, а также предусматривает ограничение динамического диапазона значений отсчетов, то очевидно, что квантованный сигнал отличается от исходного. Отличия истинных значений отсчётов от их квантованных значений представляет собой случайный процесс, названный шумом квантования. Мощность шума квантования зависит от числа уровней квантования, скорости изменения сигнала и величин шагов квантования.

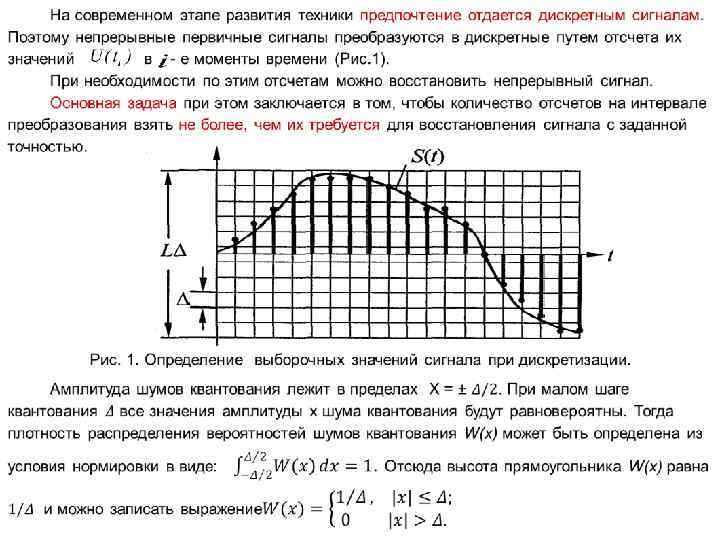
Правило дискретизации сигнала вытекает из теоремы Котельникова, в которой утверждается, что если дискретизация осуществляется с постоянным шагом , то сигнал, допускающий преобразование Фурье и имеющий непрерывный спектр с ограниченной полосой частот , полностью определяется дискретным рядом своих мгновенных значений, отсчитанных через интервалы времени и может быть восстановлен с требуемой точностью. Покажем, что это так. Если известна спектральная функция сигнала , то обратное преобразование Фурье позволяет определить сигнал в дискретные моменты времени в виде совокупности отсчетов Непериодическую функцию с граничными частотами и при формально можно разложить в ряд Фурье по некоторым «гармоникам» , если периодически продолжить ее с периодом. Запишем формулу для определения спектра , где коэффициенты ряда Фурье разложения по «гармоникам» имеют вид .

Следовательно, коэффициенты разложения спектральной функции в ряд Фурье связаны с отсчетами функции в дискретные моменты времени соотношением . Это дает возможность выразить подстановки в ряд Фурье для , в виде через отсчеты путем их (12) Учитывая то, что суммирование членов ряда (12) ведется по всем положительным и отрицательным значениям , знак в выражении (12) можно заменить на обратный, в результате чего, получим Подставив его в формулу обратного преобразования Фурье запишем (13).

Поскольку спектр сигнала ограничен, то ряд Фурье разложения сходится. Поэтому, изменив порядок суммирования и интегрирования в (13) будем иметь. Вычислим определенный интеграл в (14) функции частоты изменяющимся параметром . (14) с Подставив результат интегрирования в (14), имеем . (15) Формула (15) (ряд Котельникова) позволяет представить сигнал с ограниченным спектром в виде ряда, состоящего из отсчетов через равные интервалы времени , который можно восстановить, умножив каждый отчет на соответствующую ему функцию времени вида , сдвинутую во времени на интервал, соответствующий моменту отсчета.

1. 2. Кодирование линейных сигналов Код без возвращения к нулю. В вычислительных системах наиболее общей формой кода является код типа ДА/НЕТ (включено/выключено), использующий уровень 4, 5 В для символа « 1» и примерно 0, 4 В для символа « 0» . Однако в линии передачи целесообразнее с точки зрения эффектной реализации мощности передавать двоичный сигнал эквивалентной разницей в уровнях, симметрично сбалансированной относительно 0 В. Например, средняя мощность, необходимая для передачи двоичного сигнала с равной вероятностью формирования уровней +3 В и 0 В, составляет 4, 5 Вт (на сопротивлении 1 Ом). При использовании уровней +1, 5 В и 1, 5 В та же помехозащищенность достигается при снижении требуемой мощности вдвое (2, 25 Вт). Рис. 4. Одно (а) и двухполярный (б) коды передачи.

Код с несбалансированными значениями напряжения однополярным, а код со сбалансированными значениями – двухполярным. Примеры последовательности двоичного сигнала и его отображения в одно и двухполярном кодах представлены на рисунке (Рис. 4). Поскольку уровень каждого сигнала поддерживается в течение длительности тактового интервала, такой двоичный код называют кодом без возвращения к нулю (БВН). Как следует из рисунка (Рис. 4) код БВН не содержит переходов для длинных последовательностей 1 и 0. Он соответствует системе передачи, в которой импульсы (перед фильтрацией) затянуты на длительность тактового интервала Т. Отсюда спектр кода (и предположении о случайном характере цифрового сигнала) является спектром вида (sinх) / х. Энергетический спектр кода БВН на нулевой частоте (постоянном токе) существенно отличается от нуля. Однако большинство проводных линий передачи не пропускают сигналы постоянного тока, поскольку они подключаются к станционному оборудованию с помощью трансформаторов или разделительных конденсаторов. Кроме того, в некоторых случаях из сигнала специально удаляют постоянную составляющую с тем, чтобы обеспечить возможность дистанционного питания регенераторов. Устранение низкочастотных (и постоянной) составляющих из сигнала БВН приводит к тому, что в длинных последовательностях 1 или 0 амплитуда постепенно уменьшается. Следовательно, в течение этих последовательностей приемник потеряет не только хронирующую информацию, но и свой эталон амплитуды для оптимального различения уровней 1 и 0. Эффект среза низких частот, называемый плаванием постоянной составляющей для типичной последовательности на передаче, показан на рисунке (Рис. 5).

Отметим, что после длительной последовательности 1 сигнал на выходе линии таков, что более вероятно появление ошибок, при которых 1 переходит в 0, чем ошибок, при которых 0 трансформируется в 1. Аналогично этому длинная последовательность 0 увеличивает вероятность ошибочного перехода 0 в 1. Рис. 5. Плавание постоянной составляющей в коде БВН Эта проблема возникает не только для длинных последовательностей 1 или 0, но и во всех случаях несбалансированности числа 1 и 0. Следовательно, наличие периодических хронирующих импульсов недостаточно для устранения плавания постоянной составляющей, что существенно ограничивает область применения кода БВН. Плавание постоянной составляющей характерно не только для ЦСП. Наличие низких частот в случайном сигнале данных является основной причиной того, что для передачи данных через аналоговую телефонную сеть требуются модемы (аналоговые каналы ТЧ также не пропускают постоянного тока). С этим явлением приходится бороться также в телевизионных и радиолокационных приемниках, детекторах радиации и др. Одним из эффективных способов борьбы с плаванием постоянной составляющей является использование решающей обратной связи, называемой также корректированием посредством квантованной ОС. При квантованной ОС плавание постоянной составляющей компенсируется формированием на приемной стороне низкочастотной реакции и добавлением ее к принимаемому сигналу.
, восстановленный")
После этого восстанавливается исходный цифровой поток. Как показано на рисунке (Рис. 6 а), восстановленный цифровой поток в цепи ОС проходит через ФНЧ, на выходе которого (формируется сигнал, имеющий вид импульса последействия в канале. Сигнал ОС, добавляемый к принимаемому сигналу, удаляет последействие (межсимвольную интерференцию). Реакция цепи ОС в частотной области является дополняющей к реакции канала. а) б) Рис. 6. Влияние обратной связи а), и код с чередованием полярности импульсов б). При биполярном преобразовании кода проблема плавания постоянном составляющей решается применением трех уровней кодирования двоичного цифрового сигнала, а именно:

логический 0 передается нулевым напряжением, в то время как логическая 1 передается попеременно положительным и отрицательным напряжениями. Таким образом, для устранения составляющих постоянного тока из спектра сигнала средний уровень напряжения поддерживается равным нулю. Поскольку в биполярном коде передача логических 1 осуществляется импульсами чередующейся полярности, его называют кодом с чередованием полярности импульсов (ЧПИ) или кодом АМ 1. Для передачи каждой логической 1 обычно используются импульсы с длительностью, равной половине тактового интервала (Рис. 6 б). Такие импульсы были выбраны для упрощения выделения хронирующего сигнала в регенераторах. Энергетический спектр биполярного кода описывается выражением Здесь р – вероятность появления единиц; (G(w) – спектр одиночного импульса. Для импульсов с длительностью, равной 50% длительности тактового интервала, т. е. со скважностью, равной двум, G(w)=(T/2)sin(w. T/4)/( w. T/4). На рисунке (Рис. 7) показан вид S(w) для различных значений р (для случайного, цифрового сигнала р= (1/2). Биполярный сигнал в чистом виде не содержит хронирующей компоненты. Поэтому в регенераторах перед выделением хронирующего колебания производится двухполупериодное выпрямление сигнала, т. е. получение однополярных импульсов вместо биполярного сигнала. По существу, биполярное преобразование кода базируется на пространстве троичного кода, но с использованием только двух уровней в течение каждого конкретного тактового

Рис. 7. Энергетический спектр кода ЧПИ Следовательно, при таком преобразовании плавание постоянной составляющей устраняется за счет неэффективного и избыточного использования кодового пространства. Избыточность в сигнале дает также и другие преимущества. Наиболее важное из них состоит в возможности контролировать качество передачи путем подсчета ошибок, не имея информации о характере передаваемых сигналов. Поскольку полярности импульсов в линии долж ны чередоваться, обнаружение двух последовательных импульсов одной полярности означает появление ошибки. Это появление ошибки известно как нарушение биполярности. При каждой одиночной ошибке обязательно происходит нарушение биполярности. Следовательно, биполярный код по своему существу представляет форму кодирования с проверкой на четность. Если обнаружено нарушение биполярности, то ошибка произошла в одном из битов в интервале между импульсами, указывающими на это нарушение (включая и сами импульсы): либо какой то импульс должен был быть 0, либо какой то из принятых 0 должен был быть импульсом противоположной полярности.

Если более внимательно оценивать текущие значения отсчетов импульсов, то можно принять решение о том, где с наибольшей вероятностью произошла ошибка. Бит со значением отсчета, наиболее близким к порогу решения, скорее всего, и содержит ошибку. Данный способ принадлежит к общему классу алгоритмов решения для сигналов с избыточностью, называемых алгоритмами максимального правдоподобия или декодированием по Витерби. Отметим, что при использовании этого метода исправления ошибок требуется запоминание амплитуд импульсов. Если же величины запоминаются только после операции решения, исправить ошибки нельзя (можно только их обнаружить). В настоящее время высокая стоимость реализации данных алгоритмов исправления ошибок препятствует их широкому использованию. Кроме того, избыточность, возникающая при биполярном преобразовании, может использоваться для преднамеренного введения нарушений биполярности с целью обозначения специальных ситуаций (таких, как введение метки циклового синхросигнала при временном группообразовании) и аварийных состояний. Специальные же кодовые комбинации позволяют увеличивать содержание хронирующей составляющей в сигналах линии. Поскольку в источнике сигнала биполярность обычно не нарушается, то эти особые ситуации можно легко распознать. Конечно, если нарушения биполярности происходят по указанным причинам, а не в результате ошибок в канале, возможность контроля качества передачи усложняется.
 устройство для преобразования цифрового")
2. Цифро аналоговое преобразование речевого сигнала Цифро аналоговый преобразователь (ЦАП) устройство для преобразования цифрового (обычно двоичного) кода в аналоговый сигнал (ток, напряжение или заряд). Цифро аналоговые преобразователи являются интерфейсом между дискретными цифровыми и непрерывными аналоговыми сигналами. Наиболее общие типы электронных ЦАП: 1. Широтно импульсный модулятор — простейший тип ЦАП. Стабильный источник тока или напряжения периодически включается на время, пропорциональное преобразуемому цифровому коду, далее полученная импульсная последовательность фильтруется аналоговым фильтром нижних частот. Такой способ часто используется для управления скоростью электромоторов, а также становится популярным в Hi Fi аудиотехнике; 2. ЦАП передискретизации, такие как дельта сигма ЦАП, основаны на изменяемой плотности импульсов. Передискретизация позволяет использовать ЦАП с меньшей разрядностью для достижения большей разрядности итогового преобразования; часто дельта сигма ЦАП строится на основе простейшего однобитного ЦАП, который является практически линейным. На ЦАП малой разрядности поступает импульсный сигнал с модулированной плотностью импульсов (c постоянной длительностью импульса, но с изменяемой скважностью), создаваемый с использованием отрицательной обратной связи. Отрицательная обратная связь выступает в роли фильтра верхних частот для шума квантования. Большинство ЦАП большой разрядности (более 16 бит) построены на этом принципе вследствие его высокой линейности и низкой стоимости. Быстродействие дельта сигма ЦАП достигает сотни тысяч отсчетов в секунду, разрядность до 24 бит.

Для генерации сигнала с модулированной плотностью импульсов может быть использован простой дельта сигма модулятор первого порядка или более высокого порядка как MASH (англ. Multi stage noise SHaping). С увеличением частоты передискретизации смягчаются требования, предъявляемые к выходному фильтру низких частот и улучшается подавление шума квантования; 3. ЦАП взвешивающего типа, в котором каждому биту преобразуемого двоичного кода соответствует резистор или источник тока, подключенный на общую точку суммирования. Сила тока источника (проводимость резистора) пропорциональна весу бита, которому он соответствует. Таким образом, все ненулевые биты кода суммируются с весом. Взвешивающий метод один из самых быстрых, но ему свойственна низкая точность из за необходимости наличия набора множества различных прецизионных источников или резисторов и непостоянного импеданса. По этой причине взвешивающие ЦАП имеют разрядность не более восьми бит; 4. ЦАП лестничного типа (цепная R 2 R схема). В R 2 R ЦАП значения создаются в специальной схеме, состоящей из резисторов с сопротивлениями R и 2 R, называемой матрицей постоянного импеданса, которая имеет два вида включения: прямое — матрица токов и инверсное матрица напряжений. Применение одинаковых резисторов позволяет существенно улучшить точность по сравнению с обычным взвешивающим ЦАП, так как сравнительно просто изготовить набор прецизионных элементов с одинаковыми параметрами. ЦАП типа R 2 R позволяют отодвинуть ограничения по разрядности. С лазерной подгонкой резисторов на одной подложке достигается точность 20 22 бита. Основное время на преобразование тратится в операционном усилителе, поэтому он должен иметь максимальное быстродействие. Быстродействие ЦАП единицы микросекунд и ниже (то есть наносекунды).

3. Цифровые форматы представления сигналов в ТКС В процессе группообразования передаваемых данных цифровые сигналы от каждого из N низкоскоростных каналов поочерёдно помещаются в «свои» , выделенные по оси времени канальные интервалы и встраиваются, таким образом, в общий высокоскоростной поток. При этом осуществляется поочерёдная циклическая передача состояния информационных символов (кодов) каждого канала. Структура каждого цикла (фрейма, кадра), который представляет собой набор канальных интервалов для одноразовой передачи сигналов от всех N каналов, строго определена. Длительность цикла для передачи сигналов, поступающих из каналов ТЧ равна 125 мкс, что соответствует частоте дискретизации речевого сигнала 8 к. Гц. Весь цикл разбивается на определённое число канальных интервалов – тайм слотов. Для каждого из N объединяемых каналов выделяется канальный интервал КИ (тайм слот), в котором будет передаваться кодовая группа состояния данного канала на момент передачи. Дополнительно к информационным канальным сигналам в цикл вводятся символы синхронизации, команды согласования; а также сигналы контроля и управления – так называемые служебные сигналы. Причём служебные сигналы (синхронизация, телеконтроль, команды согласования), вводятся как общие для всех каналов, но при необходимости создаются и для каждого канала. Из за необходимости введения дополнительных, но необходимых символов в циклы, приходится увеличивать скорость передачи (кбит/с) за время цикла по сравнению с простой суммой информационных скоростей каналов. Например, 30 каналов по 64 кб/с имеют общую скорость передачи данных, равную 30 × 64 = 1920 кб/c.

Для их передачи в групповом тракте необходимо передать дополнительные символы, в сумме занимающие два канала 2 × 64 = 128 кбит/с. Итого в цифровой системе передачи данных, например, «ИКМ 30» скорость потока должна быть не менее 1920 + 128 = 2048 кбит/с, что и составляет скорость первичного группообразования (В 1). В аппаратуре ИКМ 30 цикл состоит из 30 и информационных и 2 х дополнительных канальных интервалов. Чем выше по иерархии ступень мультиплексирования (объединения потоков), тем больше предусматривается дополнительных позиций в циклах (фреймах). При распределении этих позиций во фрейме руководствуются следующими соображениями: 1. Символы синхронизации должны быть хорошо различимыми, и обеспечивать минимальное время их поиска в случае потери синхронизма. Обычно их формируют в виде сосредоточенной группы сигналов в определённой позиции (тайм слоте) цикла (фрейма); 2. Распределение команд согласования скоростей, управления и пр. (т. е. сигналов управления и взаимодействия СУВ) должно быть таким, чтобы обеспечивалась их максимальная помехоустойчивость. Их часто равномерно распределяют по циклу, чтобы случайно не получить ложные сигналы от сосредоточенной помехи, но могут их передавать и в виде группы в определённом тайм слоте (канальном интервале); . 3. Длительность цикла должна быть минимально возможной, чтобы обеспечить минимум времени на восстановление синхронизма в случае его потери; 4. Структура цикла должна позволять работать системе как в асинхронном, так и в синхронном режиме. Очевидно, что дополнительных позиций по относительно к числу информационных должно быть как можно меньшим. Следовательно, любые дополнительные сигналы необходимо передавать как можно меньшим числом разрядов (бит) и как можно меньше выделять слотов для их передачи.
 для каждого из N каналов могут передаваться гораздо реже")
Сигналы управления и взаимодействия (СУВ) для каждого из N каналов могут передаваться гораздо реже чем информационные сигналы этих каналов. Например, в каждом цикле можно передавать СУВ поочерёдно только для одного из каналов, или в одном цикле для двух каналов сразу. Значит, в нашем примере, следует использовать N циклов или N/2 циклов для того, чтобы передать СУВ для всех каналов. Такая группа циклов образует сверхцикл (мультифрейм). В первом цикле сверхцикла обычно передаётся сигнал сверхцикловой синхронизации вместо сигналов СУВ, а СУВ не передаётся. Поэтому в сверхцикле на один цикл больше, чем N или N/2. Такая организация циклов в сверхциклы необходима для организации СУВ всех каналов и правильного распределения этих сигналов на приёме. В различных практических случаях может быть реализован несколько различающийся способ размещения информационных, управляющих и служебных сигналов. Рассмотрим, например, структуру цикла, применяемую в отечественной аппаратуре ИКМ 30 (Рис. 5). В этой системе цикл, длительностью 125 мкс делится на 32 одинаковых канальных интервала (тайм слота). Для передачи информации используют 8 разрядный код при частоте дискретизации 8 к. Гц. В каждом цикле передаются СУВ сразу для двух каналов (N/2). Поскольку аппаратура ИКМ 30 мультиплексирует 30 телефонных каналов, то сверхцикл будет содержать N/2 + 1 = 16 циклов. В каждом цикле 1 й слот отводится для сигналов цикловой синхронизации, а 16 й слот – для передачи сигналов СУВ (сигналы управления, аварийные сигналы, служебные и т. п. ) и 30 каналов на передачу информации. Итого 32 КИ в каждом цикле. Нетрудно подсчитать скорость передачи в системе ИКМ 30 в бит/с. 8 к. Гц дискр × 8 разр × 32 КИ = 2048 кбит/с – скорость первичного уплотнения.

Рис. 5. Структуры сверхцикла и циклов цифровой системы передачи «ИКМ 30» .
 в СС имеют существенное значение для времени")
Структура сигналов синхронизации и количество разрядов (позиций) в СС имеют существенное значение для времени удержания системы «передатчик приемник» (ПД ПМ) в состоянии синхронизма и времени восстановления синхронизма после его потери. Кодовая группа СС должна отличаться от кодовых групп других КИ. Их отличия различны для различных скоростей передачи и различного количества разрядов в КИ. Наиболее подходящие кодовые группы для СС удаётся получить на основе понятия критических точек. Критическая точка – это точка повторяемости одинаковых чередований логических « 0» и « 1» . Например, если кодовая группа имеет «d» символов, то различают следующие сочетания: группа имеет одну критическую точку (последняя « 1» перед новым « 0» ). группа имеет «d» критических точек; группа 0101… 01 – имеет b/2 критических точек; группа 0011011 – имеет одну критическую точку. Если во всём цикле меньше 500 тактовых интервалов (позиций), то выгоднее применять коды СС с малым количеством критических точек. При большом количестве КИ в цикле выгоднее иметь коды СС с большим числом критических точек (вплоть до «d» штук). При этом поиск синхросигнала ведётся от цикла к циклу, поэтому при потере СС их ищут в течении нескольких циклов (от 1 до 100 в зависимости от кода СС и количества КИ в цикле). За это время может неправильно считываться информация. Слежение за выходом из синхронизма или входом в синхронизм осуществляется с помощью специальных буферных устройств. При несовпадении принятых кодов СС с хранящейся записью правильного кода СС принимается решение о потере синхронизма. Например, в ИКМ 30 среднее время восстановления СС 2 мс, в ИКМ 120 – 0. 75 мс, ИКМ 480 – 0. 15 мс.

1
Лекция 3 (АЦП и ЦАП).ppt