ДИНАМИКА ПРОЦЕССОВ ГТД Лекция_12_обзор.ppt
- Количество слайдов: 15



Лекция 12 Методология синтеза САУ
 Идентификация модели Объекта W(s) Выбор показателей качества системы Ø(s) Синтез регулятора")
Модель Объекта W(s) Идентификация модели Объекта W(s) Выбор показателей качества системы Ø(s) Синтез регулятора R(s)

Динамическая система – это целостное упорядоченное множество стабильно взаимосвязанных и устойчиво взаимодействующих в пространстве и во времени элементов
 – способ")
Силовая установка летательного аппарата и понятие программы управления Закон управления (программа управления) – способ воздействия на исполнительные механизмы, регулирующие расход топлива, или геометрию проточной части СУ, используя информацию о характеристиках СУ в конкретных внешних условиях. Получить и рассчитать потребную в данных условиях полета тягу двигателя можно если известны характеристики силовой установки при изменении условий эксплуатации. Такие характеристики называются эксплуатационными и представляют собой: -Скоростные характеристики (зависимость основных параметров рабочего процесса от числа Маха при неизменной высоте полета и при заданном законе управления двигателем Pуд=f(M), Cуд=f(M) ); -Высотные характеристики (зависимость основных параметров рабочего процесса от высоты полета H при постоянном числа Маха и при заданном законе управления двигателем Pуд=f(H), Cуд=f(H) ); -Высотно-скоростные характеристики (зависимость основных параметров рабочего процесса от числа Маха и высоты полета H при заданном законе управления двигателем Pуд=f(M, H), Cуд=f(M, H) ); -Дроссельные характеристики (зависимость основных параметров двигателя от частоты вращения ротора или расхода топлива–(параметр дросселирования) для заданных условий полета и закона регулирования).

Закон управления авиационного двигателя

Структура блока вычисления программы управления

Линейные динамические модели Адекватность описания динамического процесса линейной моделью выполняется при следующих условиях: 1. Изменение динамики в пределах линейности. 2. Соответствие структуры модели частотным свойствам процесса.
 U Объект Yэкс")
Идентификация Yмод Модель – W(ai, bj) U Объект Yэкс

Основная задача любой САУ Обеспечить: 1. Режим стабилизации 2. Режим программного управления 3. Режим слежения с заданной точностью соответствия между: - сигналом на выходе системы и - сигналом на входе в систему (программным движением). - характеризует качество системы

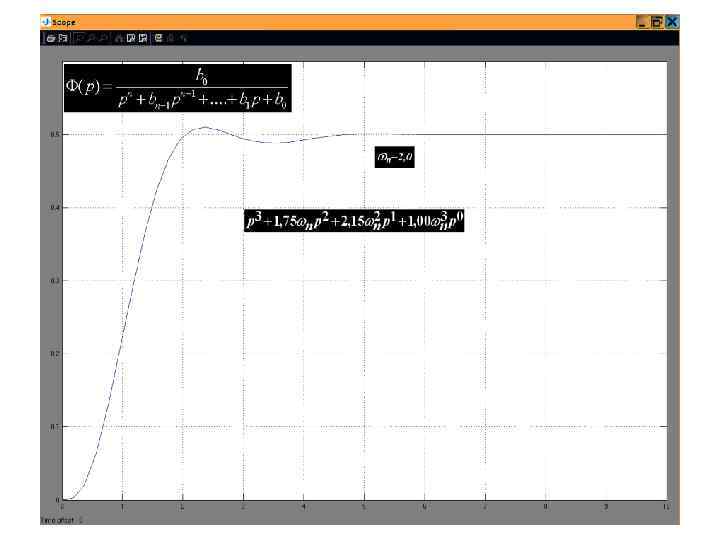
качество процессов Задание области качества через показатели качества

реакция замкнутой системы Выражения знаменателя, при которых замкнутая система имеет заданные показатели качества:

Синтез Регулятора Исходные данные: 1. Модель объекта управления 2. Заданные показатели качества системы 3. Структура регулятора Необходимо вычислить коэффициенты регулятора

Создание робастной системы Ограничения при проектировании САУ 1. Датчики : инерционность и шумы 2. Исполнительные механизмы : 3. Модель объекта : максимальная скорость нарастания сигнала, максимальное и минимальное перемещение возмущения и неадекватность модели свойствам реального объекта Основные задачи, которые должны быть решены при создании робастной системы 1. Устойчив ли контур управления с контуром обратной связи? 2. Какова чувствительность к различным возмущениям? 3. Каково влияние ошибок моделирования с помощью линейных динамических моделей? 4. Как небольшие нелинейности влияют на процессы в контуре управления?

Результат синтеза:
ДИНАМИКА ПРОЦЕССОВ ГТД Лекция_12_обзор.ppt