Лекции_по динамике и устойчивости.ppt
- Количество слайдов: 119



Курс лекций по теории колебаний Д-р техн. наук, проф. Ю. Л. Рутман

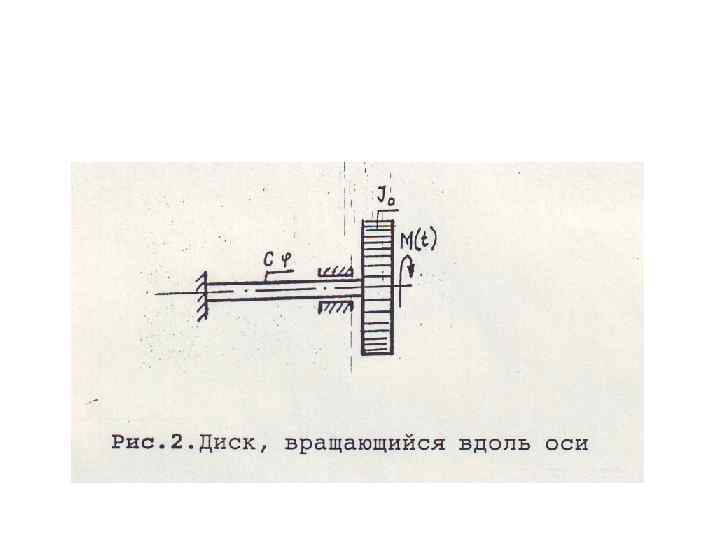

Рис. 5

Свободные системы колебания линейной Рассмотрим решение задач о свободных колебаниях линейной системы с одной степенью свободы (линейного осциллятора). Уравнение колебаний линейного осциллятора имеет вид: Введем обозначения:
 можно записать По правилу решения линейных дифференциальных")
Свободные системы колебания линейной Теперь вместо (1) можно записать По правилу решения линейных дифференциальных уравнений с постоянными коэффициентами составляем характеристическое уравнение

Свободные системы колебания линейной Обозначим При p 2>n 2 формулой или где решение уравнения (3) будет определяться

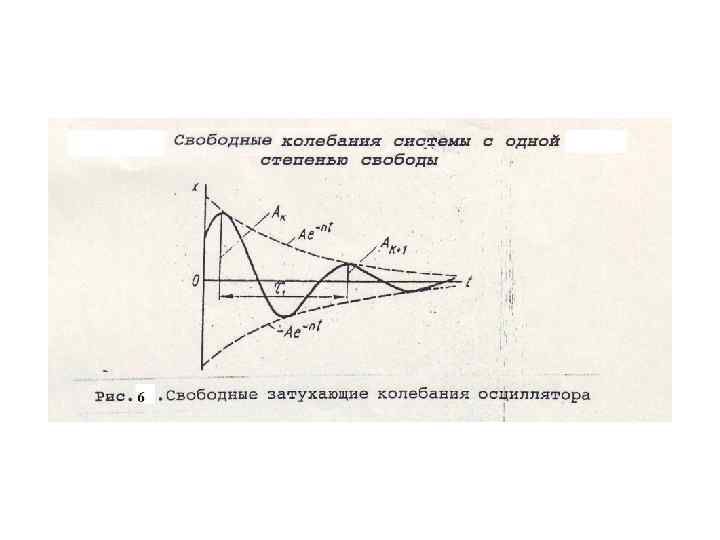
Свободные колебания линейной системы при наличии вязких сил свободные колебания Следовательно, массы представляют собой затухающих процесс – рис. 6. Процесс, показанный на рис. 6 , называют периодическими затухающими колебаниями, несмотря на неточность такого названия. Под периодом этих колебаний понимают время между двумя максимальными смещениями Величину p 1 называют круговой частотой колебаний. Размерность p 1 – 1/с. Часто вместо круговой частоты используют техническую частоту, которая измеряется в герцах:

Свободные системы Частота в герцах колебания линейной равна числу колебаний в секунду. При отсутствии вязких сил, то есть когда n=0 (осциллятор линейноупругий), формулы (8), (11) упрощаются: Иногда частоту p линейно-упругого осциллятора связывают со статической деформацией fст упругого элемента силой, равной весу тела

Свободные колебания системы имеют место формулы: Легко видеть, что линейной Найдем постоянные интегрирования c 1 и c 2 в уравнении (7). Продифференцируем (7):
, а также используя (1′), получаем Пологая t=0 в")
Свободные колебания линейной системы и (15), а также используя (1′), получаем Пологая t=0 в (7) Из (16) следует или Для линейно-упругого осциллятора n=0, вместо (18) получаем
 и (19′)")
Свободные системы колебания линейной или где Отметим, что аргумент «pt+φ» в (8) и (19′) называется фазой, а величина φ – начальной фазой. Отношение двух последовательных максимальных отклонений осциллятора при свободных колебаниях в соответствии с формулой (8) равно

Свободные системы колебания линейной где Ak, Ak+1 – см. рис. 6. Таким образом, последовательные максимальные отклонения осциллятора от равновесного положения представляют собой члены геометрической прогрессии со знаменателем e=-nτ. При n=0 знаменатель прогрессии e 0=1, то есть все амплитуды равны, и колебания происходят по синусоидальному закону. Чаще рассматривают не отношение двух последовательных отклонений, а логарифм этого отношения, который называют логарифмическим декрементом колебания: 1
 существует критическое значение параметра α, превышение которого")
Свободные системы колебания линейной Для модели (1) существует критическое значение параметра α, превышение которого приводит к исчезновению колебательных процессов в модели и к появлению затухающих апериодических процессов. Это критическое значение находится из равенства: Действительно, решение уравнения (3) имеет вид (7) лишь при p>n. При p<n общее решение (3) запишется в виде где s 1, s 2 – вещественные числа:
, неколебательное (рис. ). В случае, когда")
Свободные системы колебания линейной Движение, описываемое выражением (25), неколебательное (рис. ). В случае, когда p=n, решение уравнение (3) имеет вид Это решение по характеру не отличается от показанного на рис. . Считая n в (24) критическим значением затухания, получаем Модель (1) позволяет определить усилия, возникающие при ударе тела о препятствие. Действительно, будем полагать, что m – масса ударяющегося о препятствие тела, c – суммарная контактная жесткость тела и препятствия. Тогда процесс соударения (до отскока тела) описывается линейной моделью (1) при начальных условиях:

Свободные колебания линейной системы Рис. 7 Апериодическое движение осциллятора

Свободные системы колебания линейной где v – скорость наталкивающегося на препятствие тела. При начальных условиях (29) решение (18) имеет вид Определим максимум усилия соударения Q:

Свободные системы колебания линейной Так как потери механической энергии при ударе невелики e-πε/2 ≈1, то можно считать, что соответствует максимальной силе удара в консервативной системе (α=0).

• Вынужденные колебания линейной системы Рассмотрим решение задач о вынужденных колебаниях линейного осциллятора. Уравнение вынужденных колебаний линейного осциллятора имеет вид ( ). После деления на m с учетом (2) получаем: Как известно, общее решение неоднородного линейного дифференциального уравнения равно сумме какого-либо его частного решения x*(t) и общего решения однородного уравнения. Таким образом, решение (33) имеет вид

• Вынужденные колебания линейной системы Частное решение неоднородного линейного дифференциального уравнения можно записать в виде где - правая часть дифференциального уравнения; - реакция динамической системы, описываемой данным уравнением, на единичный импульс (G(t) называется функцией Грина). Таким образом, для уравнения (33) G(t) находится по формуле (18) при начальных условиях

Вынужденные колебания линейной системы Рис. 8 Схема разложения силы на сумму импульсов
")
• Вынужденные колебания линейной системы Так как в рассматриваемом случае с учетом (38) получаем , то из (36) Интеграл (39) называется интегралом Дюамеля Так как , то постоянные c 1 и c 2 в (35) определяются по формулам (17). В результате получаем

• Вынужденные колебания линейной системы
 можно интерпретировать как соотношение,")
• Вынужденные колебания линейной системы Отметим, что формулу (36) можно интерпретировать как соотношение, выражающее принцип наложения (суперпозиции). Произвольная нагрузка P(t) разлагается на бесконечное множество бесконечно малых импульсивных нагрузок d. J=P(ξ)dξ (рис. ). Каждая из таких нагрузок вызывает в момент t > ξ смещение где G – реакция системы на единичный импульс. Если в начальный момент система неподвижна, то полное смещение в момент t равно сумме смещений, вызываемых всеми элементарными импульсами, приложенными при t < ξ. Иначе говоря,
. Если начальные условия ненулевые,")
• Вынужденные колебания линейной системы что совпадает с (36). Если начальные условия ненулевые, то решение состоит из двух слагаемых, то есть производится суперпозиция результатов действия нагрузки и результатов действия начальных возмущений. Формула (40) полностью решает вопрос об аналитическом описании решения задачи вынужденных колебаний линейного осциллятора. Конечно, при сравнительно простых типах P(t) аналитическое решение (33) может быть получено и другими методами. Однако общим методом отыскания таких решений является соотношение (40).
 на простом примере. Пусть")
• Вынужденные колебания линейной системы Рассмотрим применение формулы (40) на простом примере. Пусть на систему внезапно подействовала постоянная сила (рис. , ): В этом случае, применяя (40), получаем Интеграл (41) удобно вычислить, перейдя к показательной форме записи тригонометрической функции. Как известно,
 при вычислении интеграла (41), имеем Учитывая,")
• Вынужденные колебания линейной системы Используя (42) при вычислении интеграла (41), имеем Учитывая, что m(n 2+p 12)=mp 2=c, а P 0/c=xст представляет собой статическую деформацию системы силой P 0, из (43) получаем

Вынужденные колебания линейной системы Рис. 9

Вынужденные колебания линейной системы

Вынужденные периодические колебания линейной системы Рис. 10

Вынужденные колебания линейной системы Рис. 11

Вынужденные колебания линейной системы Рис. 12
 в (48) получаем")
Вынужденные периодические колебания линейной системы Подставляя (49) в (48) получаем

Вынужденные периодические колебания линейной системы

Вынужденные периодические колебания линейной системы

Вынужденные периодические колебания линейной системы

Вынужденные периодические колебания линейной системы Рис. 13 Коэффициент динамичности нагрузки на основания осциллятора

Вынужденные периодические колебания линейной системы Рис. 14 Коэффициент динамичности перемещений осциллятора

Вынужденные периодические колебания линейной системы

Вынужденные периодические колебания линейной системы

Вынужденные периодические колебания линейной системы

Вынужденные периодические колебания линейной системы Рис. 15

Вынужденные периодические колебания линейной системы Рис. 16

Вынужденные периодические колебания линейной системы Рис. 17

Вынужденные периодические колебания линейной системы Рис. 18

Вынужденные периодические колебания линейной системы Рис. 18

Колебания систем с конечным числом степеней свободы

Колебания систем с конечным числом степеней свободы U – потенциал упругих сил, Т – кинетическая энергия

Колебания систем с конечным числом степеней свободы

Колебания систем с конечным числом степеней свободы
 описывают колебания")
Колебания систем с конечным числом степеней свободы Прямая форма уравнений: Уравнения (1) описывают колебания упругой системы с n степенями свободы. Если матрица масс диагональная: , то

Колебания систем с конечным числом степеней свободы Прямая форма уравнений:

Колебания систем с конечным числом степеней свободы

Колебания систем с конечным числом степеней свободы

Колебания систем с конечным числом степеней свободы

Колебания систем с конечным числом степеней свободы

Определение частот и форм свободных колебания

Определение частот и форм свободных колебания

Определение частот и форм свободных колебания

Определение частот и форм свободных колебания

Определение частот и форм свободных колебания

Определение частот и форм свободных колебания Первая собственная форма

Сейсмика

Уравнения движения

Вывод формул СНи. Па
 разрушение Билинейная диаграмма с упругой разгрузкой Идеальная упругопластическая диаграмма (диаграмма Прандтля) Рисунок")
Пластическое (вязкое) разрушение Билинейная диаграмма с упругой разгрузкой Идеальная упругопластическая диаграмма (диаграмма Прандтля) Рисунок 1 – Реальная диаграмма и ее аппроксимации Жесткопластическая диаграмма

Предельное равновесие при изгибе

Предельное равновесие при изгибе

Предельные моменты при изгибе для различных сечений

Методика анализа Нелинейная модель с одной степенью свободы • Нелинейная модель с одной степенью свободы начала применятся в работах Ньюмарка Н. , Розенблюэта Э. , Ивена В. , Велетсос А. и др. и применяется до сих пор в исследованиях Датта Т. К. и Чопры А. К. Рис. 1. Билинейная диаграмма с упругой разгрузкой
. Петлю гистерезиса и циклическую")
Модель, представленная на рис. 1 а, описывается дифференциальным уравнением (1). Петлю гистерезиса и циклическую диаграмму деформирования на рис. 1 б характеризуют следующие параметры: где FТ – предельная нагрузка системы с одной степенью свободы. Для решения задачи о предельном равновесии жесткопластических конструкций предлагается применить метод псевдожесткостей.

Движение системы с n степенями свободы описывается n дифференциальными уравнениями второго порядка. – вектор относительных перемещений (в системе координат, связанной с основанием); – матрицы масс и диссипации системы (n x n); – нелинейная гистерезисная функция (нелинейная зависимость сила – перемещение); – вектор, компонентами которого являются косинусы углов между направлениями перемещений по степеням свободы и вектором ускорения основания; – компонента сейсмического ускорения основания

Анализ адекватности модели с одной степенью свободы n 1. 2. n Сравнение моделей проводится по следующим параметрам: Перемещения, скорости и относительные ускорения центра тяжести здания (в случае систем с конечным числом степеней свободы) Перемещения, скорости и относительные ускорения массы одностепенной системы В качестве систем со многими степенями свободы в данной работе применялись многоэтажная рамная конструкция и здание с нижним гибким этажом. Динамические характеристики исследуемых объектов приведены в табл. 1. Таблица 1 Тип сооружения Круговая Период Частота частота ω, Т, с f, Гц рад/с Здание с нижним гибким этажом 0. 8585 7. 319 Многоэтажное каркасное здание 1. 612 3. 897 ω2 ω0 2 f. Т, м/с2 1. 165 53. 57 1. 0714÷ 2. 679 1. 07 0. 6202 15. 19 0. 30374÷ 0. 7594 2. 4

Исходное сейсмическое воздействие было задано в виде пяти акселерограмм землетрясений. Основные характеристики данных землетрясений приведены в табл. 2. Таблица 2 Запись землетрясения Максимальное ускорение, м/с2 Продолжительност ь воздействия t, с Преобладающий период воздействия Т, с Bucharest (BU x) RO 1. 901 21. 950 1. 440 Corralitos (CO x) USA 7. 830 16. 890 0. 560 Kobe (KO x) JP 8. 179 40. 020 0. 360 Northridge (NR x) USA 5. 566 24. 580 0. 260 San Fernado (SF x) 11. 480 20. 460 0. 380

Сравнение результатов расчетов Многоэтажное каркасное здание Рис. 2. Сравнение полученных результатов по одностепенной модели а), с результатами, полученными по модели со многими степенями свободы б), для случая многоэтажного каркасного здания на воздействие BU x.

Сравнение результатов расчетов Здание с нижним гибким этажом Рис. 3. Сравнение полученных результатов по одностепенной модели а), с результатами, полученными по модели со многими степенями свободы б), для случая здания с нижним гибким этажом на воздействие KO x.

Сравнение результатов расчетов Многоэтажное каркасное здание Таблица 3 Многоэтажное каркасное здание BU x Перемещения, м Скорости, м/с Отн. ускорения, м/с2 CO x Перемещения, м Скорости, м/с Отн. ускорения, м/с2 KO x Перемещения, м Скорости, м/с Отн. ускорения, м/с2 NR x Перемещения, м Скорости, м/с Отн. ускорения, м/с2 SF x Перемещения, м Система с одной степенью свободы max 0. 243 0. 720 3. 558 max 0. 153 0. 680 5. 833 max 0. 175 1. 415 10. 715 max 0. 347 1. 371 8. 317 max 0. 243 min -0. 339 -0. 999 -4. 018 min -0. 222 -1. 017 -8. 732 min -0. 355 -1. 284 -8. 295 min -0. 317 -1. 022 -9. 375 min -0. 158 Система со многими степенями свободы (центр масс здания) max min 0. 224 -0. 308 0. 803 -0. 949 4. 110 -4. 351 max min 0. 098 -0. 206 0. 839 -0. 809 9. 230 -9. 043 max min 0. 191 -0. 249 1. 333 -1. 280 12. 739 -11. 850 max min 0. 314 -0. 319 1. 458 -0. 948 10. 326 -9. 220 max min 0. 140 -0. 089

Сравнение результатов расчетов Здание с нижним гибким этажом Таблица 4 Здание с нижним гибким этажом BU x Перемещения, м Скорости, м/с Отн. ускорения, м/с2 CO x Перемещения, м Скорости, м/с Отн. ускорения, м/с2 KO x Перемещения, м Скорости, м/с Отн. ускорения, м/с2 NR x Перемещения, м max 0. 203 0. 353 min -0. 070 -0. 381 Система со многими степенями свободы (центр масс здания) max min 0. 290 -0. 063 0. 507 -0. 513 1. 889 -2. 686 2. 154 -2. 818 max 0. 132 0. 513 min -0. 152 -0. 696 max 0. 161 0. 482 min -0. 139 -0. 705 5. 601 -9. 173 5. 625 -8. 245 max 0. 140 0. 877 min -0. 123 -0. 925 max 0. 140 0. 845 min -0. 119 -0. 884 9. 584 -7. 101 8. 965 -6. 396 max 0. 167 min -0. 078 max 0. 159 min -0. 079 Система с одной степенью свободы

Расчет на малоцикловую усталость • Доля повреждения усталостного N – число циклов нагружения Nf – число циклов до разрушения (появления трещины) Nfi – число циклов, определяемое при заданной в цикле нагружения деформации n Доля квазистатического повреждения e –односторонне накопленная в процессе статического и циклического нагружения деформация ef – односторонне накопленная деформация к моменту разрушения (появления трещины) εf – располагаемая пластичность (деформационная способность) материала Зависимость долговечности от величины пластической деформации в цикле нагружения определяется формулой Мэнсона-Коффина: где mp – показатель пластичности, принимаемый в пределах 0, 4… 0, 6. Предельное состояние по условиям малоциклового разрушения наступает при:

Пример • • Далее в качестве примера рассмотрим многоэтажное здание с гибким нижним этажом на сейсмическое воздействие по данным NEWHALL, с пиком ускорения грунта 5. 782 м/с2 и продолжительностью 59, 98 с. Исходными данными для анализа являются следующие характеристики:

Анализ системы с гибким нижним этажом • После решения динамической задачи (с помощью программного комплекса Mathcad) было найдено значение максимального перемещения одностепенной модели, равное Рис. 3. Циклическая диаграмма деформирования одностепенной модели • Далее, используя понятие эквивалентной консоли, были определены значения перемещений в колоннах гибкого этажа и найдено D= 0, 156 м. Следовательно, значение коэффициента пластичности рассмотренной системы равно

Расчет на малоцикловую усталость • Уровень деформации, соответствующий коэффициента пластичности, равен • Исходными данными для расчета на малоцикловую усталость являются следующие характеристики: • Используя формулу, установим связь между характеристиками сопротивления малоцикловой усталости и пластичностью материала при статическом нагружения. Таким образом, при • данному значению

Результаты анализа системы с гибким нижним этажом • После отбора и классификации циклов нагружения, по формулам и находим доли усталостного и квазистатического повреждений. Далее с помощью формулы производим линейное суммирование Таблица 1 повреждений. Результаты приведены в таблице 1.

Колебательные процессы, происходящие при обтекании длинных структур ветром. Применение программных комплексов CFD

Физическое моделирование ветрового воздействия на сооружение 1. Получение общей картины обтекания. 2. Определение аэродинамических коэффициентов для сложных форм. Поля значений аэродинамических коэффициентов для фасада здания Наветренная Аэродинамические коэффициенты (СНи. П 2. 01. 07 -85) Плоские сплошные конструкции 0, 8 Подветренные 0, 8 C Наветренные Подветренная -0, 6 Проблемы применения аэродинамических труб 1. Необходимость создания макета сооружения с оснащением его датчиками для статических и динамических измерений. 2. Использование макетов в уменьшенном масштабе, применение закона подобия. 3. Создание крупных макетов и их испытания в трубах большого диаметра является сложной и дорогостоящей работой. -0, 6
 Основные подходы для моделирования течений Турбулентный поток Математическое представление потока 1.")
CFD (Вычислительная гидродинамика) Основные подходы для моделирования течений Турбулентный поток Математическое представление потока 1. Прямое численное моделирование DNS (Direct Numerical Simulation). Решение трехмерных нестационарных уравнений Навье-Стокса без применения замыкающих соотношений (моделей турбулентности). 2. Численное моделирование с использованием моделей турбулентности RANS (Reynolds Averaged Navier-Stokes equations). Решение осредненных по Рейнольдсу (U=Uср+U’) уравнений Навье-Стокса с применением замыкающих соотношений (моделей турбулентности). 3. Прямое численное моделирование крупных вихрей LES (Large Eddy Simulation). Решение нестационарных уравнений Навье-Стокса с использованием модели турбулентности для описания малых вихрей подсеточного масштаба.
 Возникновение классического флаттера обусловлено наличием критической скорости и")
Аэроупругие процессы Изгибно-крутильный флаттер (Классический флаттер) Возникновение классического флаттера обусловлено наличием критической скорости и эксцентриситета между центром жесткости структуры и центром масс. U

Срывной флаттер Динамическая система с 1 -ой степенью свободы Срывной флаттер представлен в виде нестационарного движения твердого тела с одной степенью свободы: U . F Используя эмпирическую модель для определения силы F вышеприведенное уравнение можно записать в виде: , где D – размер проекции цилиндра на плоскость. . CL определяется из уравнения Ван-дер-Поля: , где a 1, …, a 4 – постоянные величины, определяемые экспериментальным путем. U y

Срывной флаттер Частота срыва вихры Ns определяется формулой Струхаля: Ns*D/V=Sh где D – поперечный размер сечения обдуваемой структуры V – скорость ветрового потока Sh – число Струхаля

Галопирование поперек воздушного потока Для оценки сооружения на возникновение галопирования можно применить критерий Глауэрта – Ден-Гартога: Коэффициент конструкционного демпфирования y U Коэффициент аэродинамического сопротивления где CL( ) и CD( ) – функции изменения коэффициентов подъемной силы и силы лобового сопротивления соответственно от угла атаки воздушного потока. Так как то система динамически неустойчива при если Из критерия видно, что галопирование происходит при всех скоростях выше критических, определяемых конструкционным демпфированием. U B Fy( ) Uотн. y y’
 Алгоритм решения 1. Определение спектра собственных колебаний")
Колебания структуры, вызванные турбулентным потоком (Ветровой резонанс) Алгоритм решения 1. Определение спектра собственных колебаний структуры: 2. Решение уравнения движения, в правой части которого спектральная плотность мощности (спектр Давенпорта) и получение спектра ответа (перемещения, скорости, ускорения): Структура Турбулентный поток Собственные формы Спектральная плотность 3. Определение среднеквадратического отклонения структуры из спектра ответа: Смотри рекомендации по уточненному динамическому расчету зданий и сооружений на действие пульсационной составляющей ветровой нагрузки (утверждены Научно-техническим Советом ЦНИИСК 15 декабря 1999 г. )
 в современных программных комплексах")
Методы расчета сооружений на ветровые нагрузки (ветровой резонанс) в современных программных комплексах

u – перемещения точек сооружения

Vср – давление, соответствующее средней скорости ветра Wпульс. – это максимальная пульсационная составляющая давления. Wпульс. находится из (6). Wпульс. 2 Умножая Wпуль. на 3 (правило 3σ), получаем Wрасч. пульс. , ζp 0 - коэффициент пульсации:

Рис. 1 Рис. 2 Рис. 4 Рис. 3 Рис. 5

Рис. 6 Рис. 8 Рис. 7 Рис. 9

Рис. 10 Рис. 11 Рис. 12

Динамический метод

Динамический метод

Энергетический метод

Статический метод
 (12) Рис. 13 (13) (14) (15) (16)")
(11) (12) Рис. 13 (13) (14) (15) (16)
 (18) (19)")
(17) (18) (19)

Рис. 14 Рис. 15

Рис. 16 Рис. 17 Рис. 18

Рис. 19

Рис. 20

Рис. 21 Таблица 1
 (21) (22) (23) (24) (25)")
Рис. 22 (20) (21) (22) (23) (24) (25)
Лекции_по динамике и устойчивости.ppt