
Круг задач , решаемый специализированными ТВ системами очень






















 называют систему обнаружения, измерения координат и параметров")




 излучение на частоте лазерного излучения, либо излучение, частота")














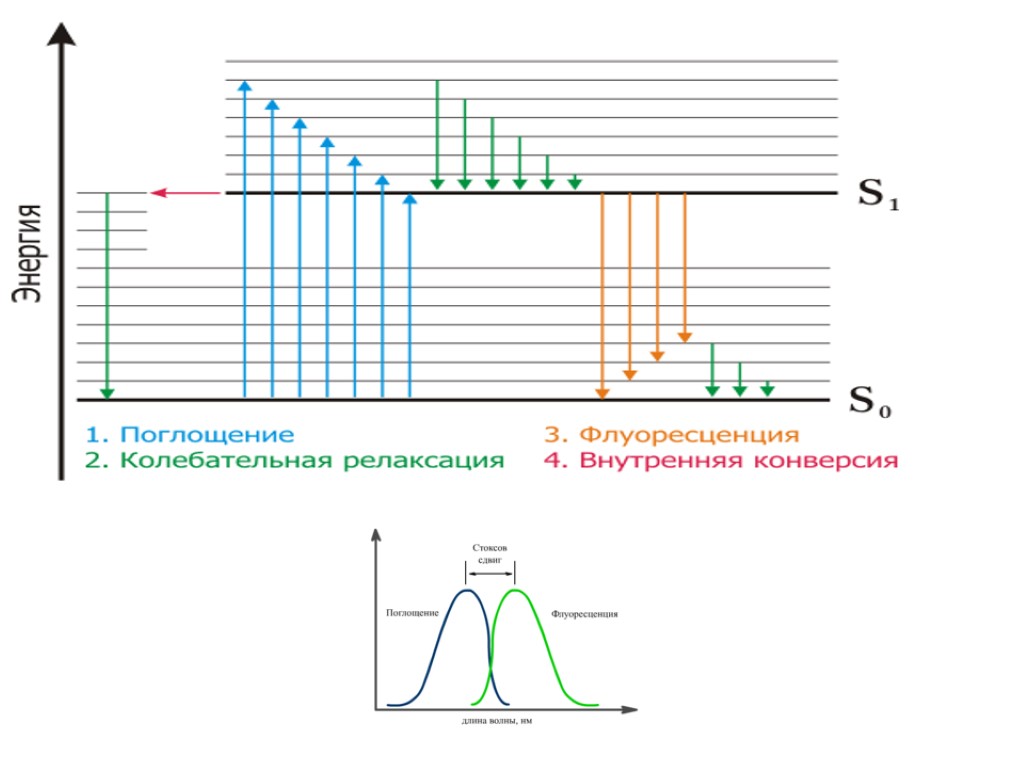
; * вынужденной флуоресценцией. При КР лазерное излучение взаимодействует с молекулой,")

t и ( + 1)t")


- коэффициент спектрального пропускания приемной оптической системы; Т(R) -")





 а) 1-")
 Лимонное дерево б) Огурец (сорт ТСХА 412)")

 и предстательной железы б) крысы 1-")

; F( λ,")


,")

, с каким –")




 с возбужденного уровня r на нижние")



")



,")
 Согласно уравнению (18) принимаемый сигнал КР пропорционален эффективной площади приемного объектива S. Диаметр")







![Литература [1] Жутяева Т.К. //Локационные методы исследования объектов и сред в оптическом и акустическом](https://present5.com/customparser/166861354_443823714 --- present_l12_remote_sensing_110-04-14.ppt/slide_92.jpg "Литература [1] Жутяева Т.К. //Локационные методы исследования объектов и сред в оптическом и акустическом")
![[9] Малашин М.С., Каминский Р.П., Борисов Ю.Б. //Основы проецирования лазерных локационных систем, -Москва, Высшая](https://present5.com/customparser/166861354_443823714 --- present_l12_remote_sensing_110-04-14.ppt/slide_93.jpg "[9] Малашин М.С., Каминский Р.П., Борисов Ю.Б. //Основы проецирования лазерных локационных систем, -Москва, Высшая")
![[18] Measures R.M., Garlic J. //Laser induced spectral signatures of relevance to environmental sensing,](https://present5.com/customparser/166861354_443823714 --- present_l12_remote_sensing_110-04-14.ppt/slide_94.jpg "[18] Measures R.M., Garlic J. //Laser induced spectral signatures of relevance to environmental sensing,")


present_l12_remote_sensing_110-04-14.ppt
- Количество слайдов: 96
Круг задач , решаемый специализированными ТВ системами очень широк. В него входят : -видионаблюдение; -техническое зрение -телевизионный канал в локации; -задачи позиционирования; - задачи обнаружения и распознавания Задачи, решаемые специализированными ТВ системами
Позиционирование в задачах калибровки, юстировки, коррекции
Возникают такие задачи достаточно часто, когда имеется необходимость обеспечения высокой точности пространственной ориентации одного объекта относительно другого, либо контроля девиации координат КТ объекта, например, отклонения от вертикали телевизионных опор, дымовых труб, упругих колебаний мостовых опор и пролетов. Это может быть и обеспечение «слепой» посадки вертолета на нестандартную неподготовленную площадку или автоматическая стыковка сложных габаритных узлов (не обязательно в космосе); скажем, при установке на посадочное место буровых вышек с помощью вертолета. Оптическая привязка позволяет решить проблему высокоточного отслеживания смещения КТ на удаленном (до 8 м) объекте (с точностью до 20 мкм), применяя ПЗС - матрицы со сравнительно низким разрешением (640х480 пкс). О П – способ состоит в передаче по оптическому каналу изображения контрольной светящейся точки подвижной системы и слежение за смещением этой точки в подвижной системе координат по перемещению ее изображения на ПЗС – матрице неподвижной системы координат,
Смещение, скручивание и изгиб
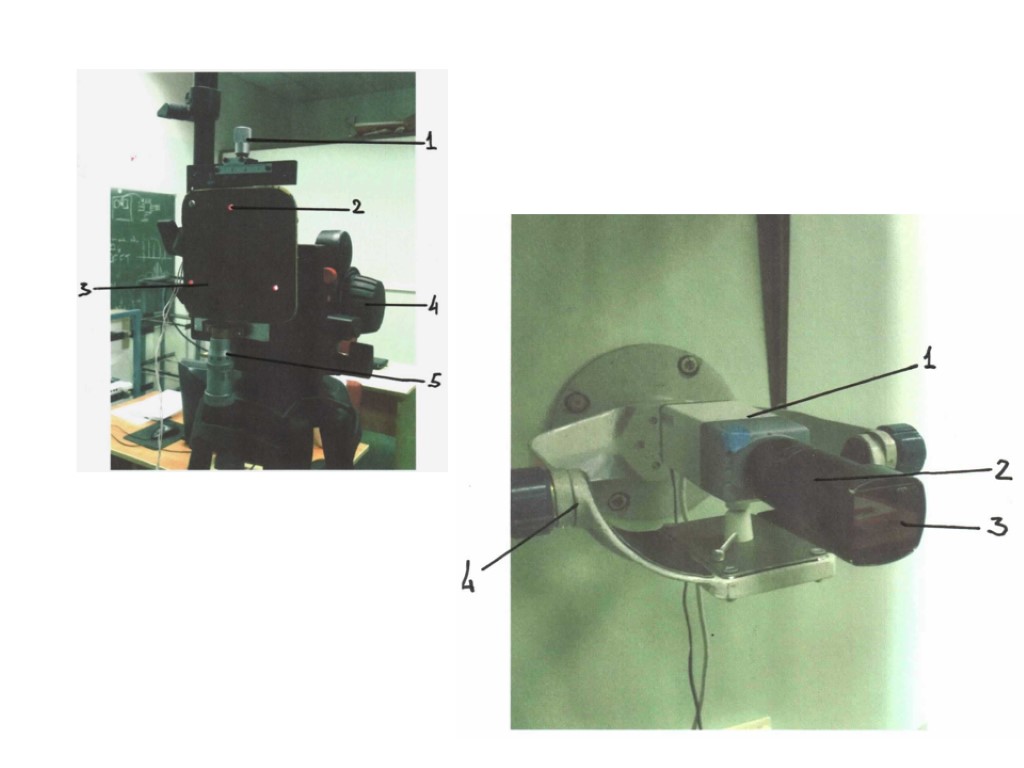
Позиционирование в задачах калибровки, юстировки, коррекции Корректировка возможна с помощью оптической системы привязки Блок – схема оптической системы привязки (ОСП) Схема оптического контрольно- измерительного устройствав
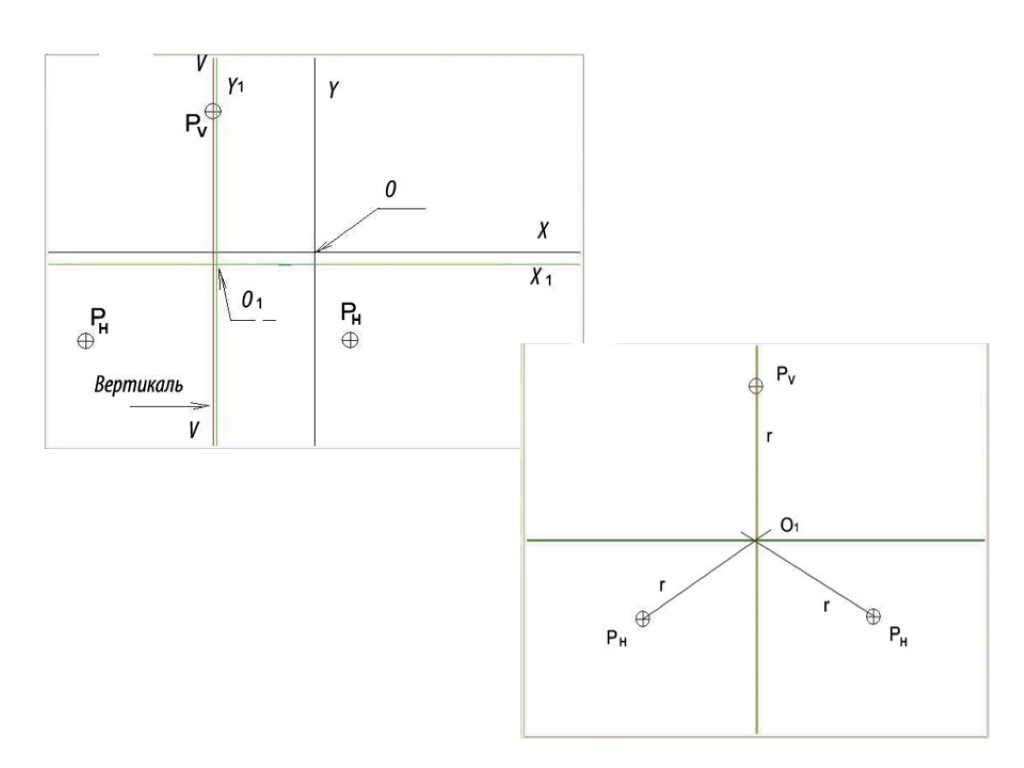
Смещение изображения контрольных источников на ТВ матрицах O O’ X1
Л 11 - 26 Координаты центра тяжести пятна засветки ∑j Nj - суммарное количество засвеченных элементов при построчном подсчете; ∑iNi. -суммарное количество засвеченных элементов при подсчете по столбцам смещение – 0,5, Гистограмма распределения засветки (единиц) по строкам- Сj= Гистограмма распределения засветки (единиц) по столбцам где nj - номер столбца, она характеризует распределение « единиц» (засветки) по оси X фотоприемной матрицы. ,
Преобразование систем координат X = x0 + x * cos Θ - y* sin Θ Y = y0 + x * sin Θ- y* cos Θ, где x0, y0 Θ= arccos Θ ± πk, где к = 0,1,2 А – база _
Блок-схема алгоритма нахождения координат центра тяжести пятна проекции контрольного элемента.
Структурная схема системы оптической привязки
Cубпиксельная точность определения координат Накладывая матрицу-маску на области исходной матрицы, проводя поэлементное вычитание и последовательно перемещая её по элементам матрицы А., мы получаем разностную двумерную функцию D Изображение распределения яркости матрицы-маски
Принцип субпиксельного измерения Oбработка информации о засветке ПЗС – матрицы от ТИС удаленного объекта в ПК проводится в два этапа – на первом этапе нахождения координат центра тяжести выполняется поиск области изображения, в которой находится пятно засветки, на втором – для найденного пятка засветки определяются с высокой точностью координаты центра тяжести этого пятна и вычисляется смещение в плоскости контрольной точки объекта слежения.
Изображение при отсутствии боковой засветки.
Локационная интерферометрия
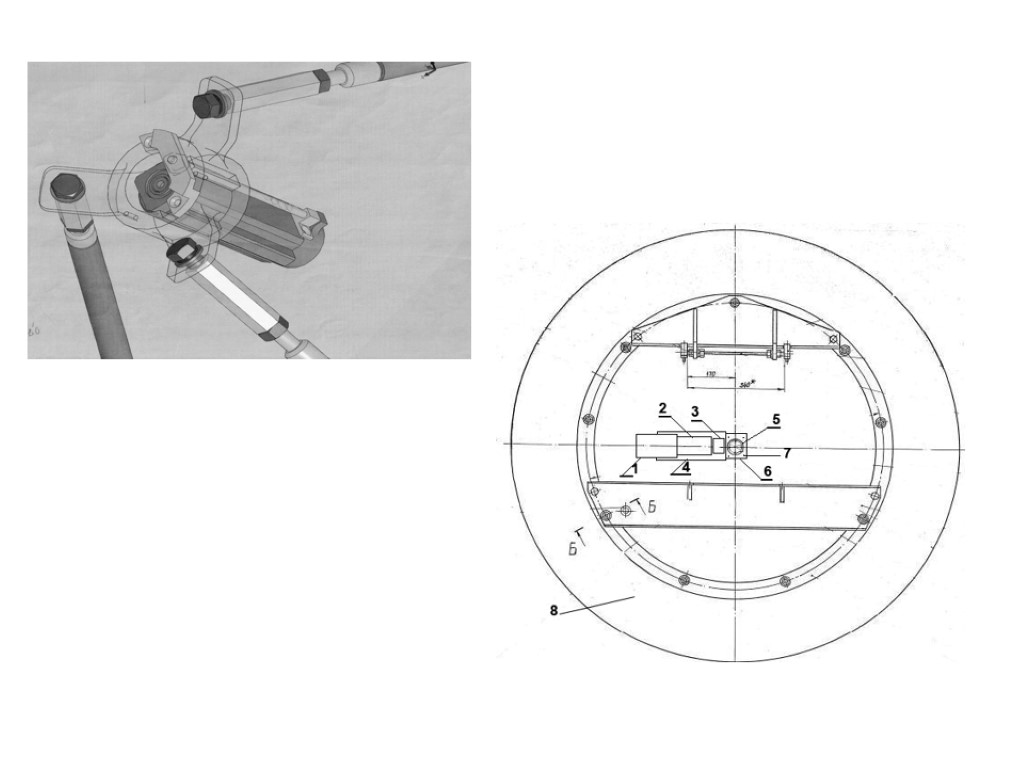
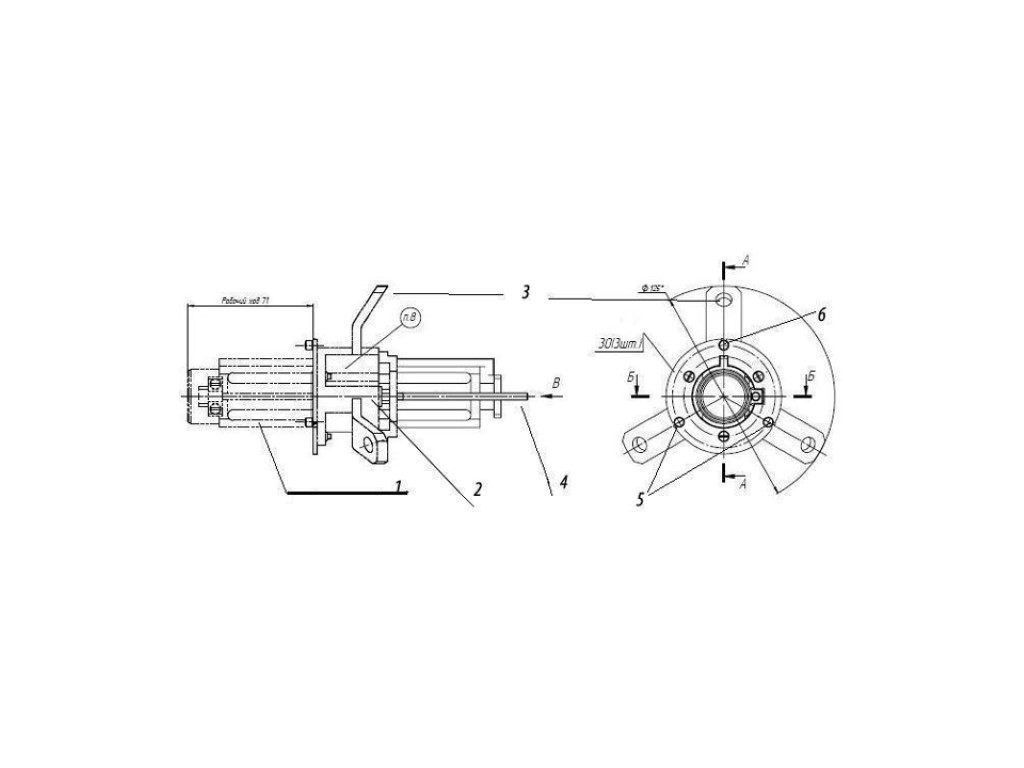
Задачи осевого центрирования объекта
Разработка подвижного узла облучателя Разработка принципа проведения юстировочных работ для выставления облучателя в фокусе и на оси антенны. Разработка узла юстировки антенны юстировочного оборудования и ПО по совмещению облучателя с осью антенны.
Принцип выставления облучателя в фокусе и на оси антенны.
ЛАЗЕРНАЯ ДИСТАНЦИОННАЯ ДИАГНОСТИКА
Оптические системы исследования получили бурное развитие с появлением лазеров – принципиально новых когерентных источников оптического диапазона. Определяющим в лазере является не спонтанное излучение, характерное для тепловых источников света, а вынужденное излучение возбужденных активных атомов или молекул рабочего вещества с помощью устройства накачки. Суммарное вынужденное излучение от активных центров оказывается жестко связанным по фазе как во времени, так и в пространстве, что и обусловливает его высокую временную и пространственную когерентность. Эта высокая когерентность вызвана двумя основными причинами: природой вынужденного излучения и влиянием оптического резонатора.
Оптические системы исследования Оптической локационной системой (ОЛС) называют систему обнаружения, измерения координат и параметров движения обнаруженных объектов, излучающих или рассеивающих электромагнитные волны с частотами 3·1011 … 3·1016 Гц. Оптические системы для дистанционного исследования окружающей среды. - диагностики объектов органического происхождения, - для решения задач контроля окружающей среды, --- - для распознавания и идентификации различных объектов.
Структурная схема оптической локационной системы
Обработка информации проводится в соответствии с выбранным методом дистанционной диагностики. Структурная схема лидаров практически совпадает со схемой оптической локационной системы (ОЛС) . В ее состав также входят лазерный источник, оптическая система (ОС), формирующая излучаемый в направлении объекта световой пучок и собирающая отраженное и преобразованное объектом излучение, приемник излучения, узлы обработки информации и узлы наведение луча на объект. Основное отличие от ОЛС состоит, в узле приемника, обеспечивающего спектральное разложение принимаемого излучения, регистрацию компонентов и последующую обработку информации.
LOTIS Tii Лазер light amplification by stimulated emission of radiation оптический квантовый генератор - это устройство, преобразующее энергию накачки (световую, электрическую, тепловую, химическуюи др.) в энергию когерентного, монохроматического, поляризованного и и узконаправленного потока излучения. Физической основой работы лазера служит квантомеханическое явление вынужденного (индуцированного излучения. Излучение лазера может быть непрерывным, с постоянной мощностью, или импульсным, достигающим предельно больших пиковых мощностей
Особенности дистанционной диангостики Применение лазерного излучения для решения проблем состояния окружающей среды имеет ряд несомненных преимуществ перед любыми контактными методами анализа - как при изучении газового состава среды, метеорологических параметров атмосферы, исследовании загрязненности воздушной среды, так и для раннего обнаружения опасных, представляющих угрозу безопасности, веществ. -возможность получения информации об объекте исследования бесконтактным способом; -получение данных с высокой оперативностью и в значительных пространственных масштабах; -возможность проведения тотального контроля.
Объекты исследования Это либо рассеянное (поглощенное) излучение на частоте лазерного излучения, либо излучение, частота которого определяется колебательно - вращательной структурой зондируемого объекта. Оптическая система, предназначенная для бесконтактного измерения параметров удаленной мишени, использующая лазер в качестве источника возбуждения удаленного объекта и проводящая в приемном тракте анализ отклика объекта на лазерное возбуждение, сокращенно называется лидаром.
Периодическая таблица Менделеева Д.И.
Вращательно-колебательная структура
Схема проведения лазерного дистанционного зондирования Схема проведения лазерного дистанционного зондирования
Лидарное уравнение - энергия регистрируемого излучения на длине волны λ, объект находится на расстоянии R от излучателя и приемника; ΕL - выходная энергия лазера (на длине волны λ); Т(R) - общий коэффициент пропускания атмосферы (для длин волн λ… λ1); ξ ® - основанная на геометрическом рассмотрении вероятность того, что излучение объекта достигнет детектора, находящегося на расстоянии R (коэффициент перекрытия - геометрический форм-фактор); (А0/R2) - телесный угол, в котором осуществляется прием сигналов;- функция пропускания приемной оптической системы в диапазоне ( λ, λ+ Δ λ); ; λ - длина волны излучения лазера, ; К1 - сложная функция концентрации центров переизлучения; F( λ, λL ) - эффективность переизлучающих центров.
Типы взаимодействия лазерного излучения с веществом Различают типы взаимодействия, связаные с: * рассеянием Релея; * рассеянием Ми; * комбинационным рассеянием (Рамана); * поглощением; * вынужденной флуоресценцией.
Дифференциальное сечение процесса и при классическом, и при квантовом описании является количественной характеристикой рассеяния (преобразования) света, определяется как отношение потока излучения dI , рассеянного в малый элемент телесного угла dΩ к величине падающего потока I0 Параметр F ( λ, λL ) в уравнении является функцией дифференциального сечения процесса – d / d эффективность процесса) в результате которого появляются вторичные излучающие центры. Этот параметр определяет основные различия, возможности и области применения методов дистанционного зондирования.
Методы лазерной дистанционной диагностики Релеевское рассеяние Лазерное излучение упруго рассеянное атомами или молекулами наблюдается на частоте возбуждения. d / dΩ 10-12 cм2 ср-1 d= 0 Рассеяние Ми Лазерное излучение упруго рассеянное малыми частицами (размер частиц соизмерим с длиной волны излучения) наблюдается на исходной частоте. d / dΩ 10-10 cм2 ср-1 d= 0 Резонансное рассеяние Лазерное возбуждение на частоте определенного электронного перехода в атоме или молекуле ι, рассеивается с большим сечение на частоте ι d / dΩ 10-26 cм2 ср-1 0= ι
Комбинационное рассеяние Лазерное излучение взаимодействует с молекулой, отклик наблюдается с характеристическим частотным сдвигом, d= j =0-1 d / dΩ 10-29 cм2 ср-1 Лазерно- индуцированная флуоресценция Лазерное возбуждение на частоте определенного электронного перехода в атоме или молекуле претерпевает поглощение с последующим излучением на более низкой частоте, в молекулах наблюдается широкополосное излучение d / dΩ 10-22 cм2 ср-1 d - широкая полоса Поглощение Наблюдается ослабление лазерного пучка, если частота излучения попадает в полосу поглощения данной молекулы. d / dΩ 10-19 cм2 ср-1 0= ι Дифференциальное поглощение и рассеяние Дифференциальное ослабление двух лазерных пучков определяется по их сигналам обратного рассеяния. Один на резонансной частоте перехода (0), другой на частоте сдвинутой на крыло () d / dΩ 10-20 cм2 ср-1 d1= 0 d 2=
Релеевское рассеяние , , Ринд.=α Е, Ринд = =2c/ n N Конфигурация рассеяния эл.-маг. Излучения электроном
Ми -рассеяние Ми - рассеяние – это рассеяние на аэрозольных частицах, ядрах Айткена, частицах пыли, облаков, тумана, дымки, кристалликов льда. где bч - характерный размер частицы Характерные размеры частиц атмосферы
Параметры -фактор эффективности обратного рассеяния Ми - Q; --объемный коэффициент обратного рассеяния ; -полный объемный коэффициент рассеяния S. Зависимость фактора эффективности обратного рассеяния Q(R,n) от параметра αR Высотный профиль коэффициентов обратного рассеяния (, z) на частоте основной и второй гармоник лазера на рубине. объемный коэффициент обратного рассеяния .
Нормальное распределение частиц для некоторых типов облаков. 1 газ; 2- кучевые облака при ясной погоде; 3- туман; 4 - скопление кучевых облаков. Eизл – энергия излучения лазера, Дж, Sэфф – эффективная площадь приемного телескопа, σR() – полное эффективное сечение рассеяния объекта на длине волны ,; τпрд – коэффициент пропускания передающей оптики; τпрм – коэффициент пропускания приемной оптики; τа – коэффициент пропускания атмосферы при распространении излучения до объекта и обратно, Епри мин –минимально обнаруживаемая энергия сигнала, отраженного от цели, Дж; G0 – коэффициент усиления выходной оптики, θпрд – полная ширина луча на выходе коллиматора, рад. Для расчета дальности лидаров, использующих МИ и релеевское рассеяние
Метод дистанционной диагностики, основанный на поглощении лазерного излучения Поглощение с резонансным изменением дипольного момента разрешенного оптического перехода g – r (из состояния g в состояние r ). h - постоянная Планка; - круговая частота перехода; Bgr- коэффициент Эйнштейна для поглощения I = I0 exp(-kx), Рис. а - лидарный сигнал поглощения на линии Р2(3) молекулы HCl (облучение DUE- лазером); б - профиль концентраций молекул HCl Bgr= на переходе g – r; dgr - дипольный момент перехода; L() - форма линии поглощения,= Г –время жизни состояния r ; с – скорость света.
Дифференциальное поглощение Χ = σ0N0ΔR Рис. Метод ДПР, определение содержания NO2 в шлейфе дымовой трубы: а, б – лидарные сигналы - (а – 448,1нм; б-– 446,5нм); в – отношение этих сигналов; г- концентрация молекул NO2, проинтегрированная по сечению шлейфа. ДП – коэффициент (Χ) σ0 – сечение резонансного поглощения; N0 –концентрация частиц (атомов ,молекул); ΔR –толщина поглощающего слоя.
* комбинационным рассеянием (Рамана); * вынужденной флуоресценцией. При КР лазерное излучение взаимодействует с молекулой, отклик наблюдается с характеристическим частотным сдвигом, d= j =0-1 d / dΩ 10-29 cм2 ср-1 при известном значении сечения резонансного поглощения σ0 зависимость Χ от N0 позволяет достаточно эффективно определять концентрации загрязняющих веществ в атмосфере. ДП используется: для измерения концентраций; для картирования рассеивания (перемешивания) молекул загрязняющих веществ в дневное и в ночное время ; для изучения проблемы кислотных дождей.
Ринд.=α Е, Ринд = Конфигурация рассеяния эл.-маг. Излучения электроном 0 Осциллирующие компоненты КОМБИНАЦИОННОЕ РАССЕЯНИЕ
Метод дистанционной диагностики, основанный на кобинационном рассеянии ( - 1)t и ( + 1)t v= 0, 1 J = 0, 2; [ см -1 ] ; λ - длина волны Схематичное представление переходов при комбинационном рассеянии: Спектр комбинационного рассеяния CCl4
Спектр КР задымленной атмосферы. Основные компоненты воздушной среды
Лидарное уравнение - энергия регистрируемого излучения на длине волны λ, объект находится на расстоянии R от излучателя и приемника; EL - выходная энергия лазера (на длине волны λ); Т(R) - общий коэффициент пропускания атмосферы (для длин волн λ… λ1); ξ( R ) - основанная на геометрическом рассмотрении вероятность того, что излучение объекта достигнет детектора, находящегося на расстоянии R (коэффициент перекрытия - геометрический форм-фактор); (А0/R2) - телесный угол, в котором осуществляется прием сигналов; k( λ)- функция пропускания приемной оптической системы в диапазоне ( λ, λ+ Δ λ); ; λ - длина волны излучения лазера, ; К1 - сложная функция концентрации центров переизлучения; F( λ, λL ) - эффективность переизлучающих центров.
Лидарное уравнение для метода КР ()- коэффициент спектрального пропускания приемной оптической системы; Т(R) - общий коэффициент пропускания атмосферы (для длин волн λ… λ1) ; λ - длина волны излучения лазера; N(R) - концентрация центров рассеяния; 5(L,) - общее поперечное сечение рассеяния на длине волны наблюдения и падающего излучения с длиной волны λL — из спектра комбинационного рассеяния, можно извлечь информацию о вращательно- колебательной структуре молекулы, которая индивидуальна для каждой молекулы. А именно об Q –ветви, определяемой электронным переходом (10) и колебательно – вращательным переходом (J=0; v=0). Это позволяет раздельно обнаруживать присутствие молекул различных загрязняющих веществ, практически без каких - либо помех, связанных с присутствием других молекул; — интенсивность линий в спектре КР всегда пропорциональна числу молекул в единице объема (плотности), независимо от температуры вещества. Это свойство позволяет определять концентрацию компонентов; — источник света, возбуждающий спектр КР, в частности лазер, может работать на фиксированной частоте; Особенности метода КР
Особенности метода КР — практическая безынерционность процессов КР (переизлучение происходит уже через время порядка (10-14 -10-15) с. с момента взаимодействия молекулы с лазерным излучением); ‑ молекулы азота, содержащиеся в атмосфере в известной концентрации, могут использоваться в качестве репера или элемента сравнения при определении абсолютной концентрации загрязняющих веществ (постоянная Лошмидта 2,68*1019 см-3; приземная концентрация азота -78,1%, следовательно, концентрация азота – 2,09 *1019 см-3); - количество одновременно и независимо измеряемых загрязнителей, определяется лишь возможностями установки; дальность обнаружения в пределах - 100 м; - предельная дальность достигается при использовании методик накопления сигнала; Разновидность КР -- РКР резонансное комбинационное рассеяние 0 Частота сдвига d / dΩ 10-19 cм2 ср-1
ΔN2 Δ νs ν0 ναs
Вращательно-колебательная структура
Метод дистанционной диагностики, основанный на лазерно - индуцированной флуоресценции Схемы переходов в молекуле при вынужденной флуоресценции I(t) = I0 exp(-t/τj) I0 – первоначальная интенсивность излучения, t- текущее время , τj- характеристическое время, обратная ему величина является суммой констант скорости кj всех излучательных и безызлучательных процессов гибели данного возбужденного состояния. S0 S1- основной и первый возбужденный синглетные уровни, Т1 -первый триплетный уровень, h0 - возбуждение на частоте 0; hфлуор. – флуоресценция, 0 > флуор ; hфосфор. – фосфоресценция - безызлучательные ( тепловые) переходы (Т1- S0) Лазерное возбуждение на частоте определенного электронного перехода в атоме или молекуле претерпевает поглощение с последующим излучением на более низкой частоте, в молекулах наблюдается широкополосное излучение d / dΩ 10-22 cм2 ср-1
. Спектры флуоресценции чистых растительных пигментов + - флавопротеина, ▄ - хлорофилла, - витамина К1, - пиридин нуклеотидов, ▫ -транс - - каротина
Спектры флуоресценции древестной растительности Спектры ЛИФ листьев (при облучении Ar+ - лазером) а) 1- томат (сорт - «Сибиряк»), 2- томат (сорт- «Боречь»); б) перец (сорт - «Прима»); в) цветная капуста (сорт –«Солокрол»); г) салат (сорт-«Рига»)
Зависимость спектров ЛИФ от режима полива а) Лимонное дерево б) Огурец (сорт ТСХА 412) в) Помидор (сорт «Сибиряк») а) б) в)
Зависимость спектров ЛИФ бобовых от воздействия гербицидов Зависимость спектров ЛИФ зеленых растений от режима питания
ЛИФ в медицине Спектр ЛИФ от почки а) и предстательной железы б) крысы 1- здоровый орган, 2- опухолевый Спектр ЛИФ крови
Регистрация спец. веществ методом ЛИФ Корректировочные спектры ЛИФ экстрактов НВ , λ0 =290нм мкм I,отн.ед Корректировочные спектры ЛИФ ВВ, λ0 =0,3371мкм
Лидарное уравнение для ЛИФ оптической системы в диапазоне λ, λ+ Δ λ); F( λ, λL ) - эффективность флуоресценции исследуемого объекта, F( λ, λL ) =Q F LF ( λ ) ; Q F - эффективное сечение флуоресценции ; LF(λ)- профиль излучения каждой компоненты в спектре флуоресценции представляет функцию пропускания приемной Спектр ЛИФ нефти и пяти нефтепродуктов: 1. Солярное масло, 2. Дизельное топливо, 3. Керосин, 4. Бензин А-72, 5. Бензин А-95, 6. Сырая нефть.
При этом «распознавание» понимается как задача преобразования входной информации, в качестве которой уместно рассматривать некоторые параметры, признаки распознаваемых образов в выходную информацию, представляющую собой заключение о том, к какому классу относится распознаваемый образ Дисциплина «распознавание образов» трактуется как область науки, связанная с машинным распознаванием тех или иных закономерностей при наличии шума или сложных условий. Дистанционное зондирование как задача распознавания образов
РАСПОЗНАВАНИЕ Рис 12.11 Представление чисел в формате 3х5 0 = 1,1,1 1= 0,0,1 1,0,1 0,1,1 1,0,1 0,0,1 1,0,1 0,0,1 1,1,1 0,0,1 aij bij В матричном виде 0 1 2 3 4 5 6 7 8 9
Л12 - 17 Основные принципы распознавания образов Распознавание – это отнесение конкретного объекта (реализации), представленного значениями его свойств (признаков), к одному из фиксированного перечня образов (классов) по определённому решающему правилу в соответствии с поставленной целью Построение алгоритма распознавания предусматривает -Изучение объектов, выявление отличительных и сходственных характеристик; -Классификация распознаваемых объектов; -Составление словаря признаков, а) логических (признаки, представляющие собой суждения качественного характера – наличие или отсутствие некоторых свойств, требующих ответов «да» «нет», или «правда», «ложь») б) вероятностных- имеющих случайные конкретные численные значения, количество обуславливается информативными параметрами - априорными) -Описание классов объектов на языке признаков -Собственно разработка алгоритмов распознавания в признаковом пространстве -Разработка механизмов и алгоритмов управления системой распознавания для достижения в соответствии с выбранным критерием качества максимального значения правдоподобия . -Выбор показателей эффективности (вероятность правильных решений, среднее время решения задачи распознавания, величина расходов)
Дистанционное зондирование как задача распознавания образов Ω j , Ωj Ω j= 1, …,m xi , (i=1,..., N) . вектора x = {x1,…, xN} , образуют пространство признаков системы распознавания, Di., i=1, ……. , m; N- размерность пространства x = {x1,…, xN} Распознавание – это построение разделительных функций Fi(x1, x2 …..xN ), i = 1, ……. , m в признаковом пространстве со свойствами : если объект, имеющий признаки относится к классу j , то величина Fi(x10, x2 0………..xN0) должна быть наибольшей и для всех других признаков объектов относящихся к классу j , Разбиение пространства признаков для двух классов Fq(x) - Fg(x) =0 q,g = 1, …..m, q g
Распознавание В случае, если выбранная величина L данного объекта (допустим ), с каким – либо классом g , g = 1,…, m . превышает аналогичную меру близости с другими классами, то принимается заключение о принадлежности объекта к классу , g т.е. g при L(, g) = extrj L(, j), j = 1,…, m 1. Cреднеквадратичное расстояние d между признаками xie данного объекта е Wi (i=1,..., N). L(, g) = L(, g) е е g , g 2. Риск R, Решение о принадлежности g принимается в случае R( g /aN) = mini R(i/ aN ) Алгоритмы распознавания основываются на сравнении той или другой меры близости L (или меры сходства) распознаваемого объекта с каждым классом
Л12 - 18 Системы распознавания могут быть: -простые; -сложные одноуровневые; -сложные многоуровневые; -обучающиеся системы Алгоритмы распознавания основываются на сравнении меры сходства той или другой меры близости с каждым классом Мера близости L классом g g=1, …..m, объекта с L(,g) = extr L(,g) i=1……,m 2. на оценке риска, связанного с решением о принадлежности распознаваемого объекта к классу по платежной ведомости Это может быть ср.квадр. ошибка
Л12 - 19 Тогда величина условного риска R, связанная с решением вида при условии, что имеет место событие будет: и решение вида принимается в случае, если риск ошибок основан на оценке вероятностей ошибок распознавания и их стоимости. Отбор информативных признаков
ИСПОЛЬЗОВАНИЕ МЕТОДОВ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ Привлекая дистанционные ЛИФ и КР методы для решения конкретных задач, следует принять во внимание ряд обстоятельств а) объектами исследования могут быть - объекты природного происхождения, объекты, являющиеся продуктами жизнедеятельности человека, а также сам человек. Отсюда следует ожидать очень широкий диапазон разброса интенсивностей наблюдаемого сигнала; б) следует также учитывать засветку, фон от окружающих предметов, присутствие макро и микро частиц, дающих свой вклад в наблюдаемый сигнал; в) учитывая возможность использования методов исследования в местах скопления людей, немаловажное значение имеет оптимизация используемого для возбуждения лазерного излучения. И, в первую очередь стоит вопрос о безопасности излучения для глаз. г) технические решения, воплощающие методику дистанционного обнаружения и распознавания, должны реализовываться с учетом требования - получения оперативных результатов (желательно в режиме реального времени).
Выбранные и измеренные параметры спектра КР и ЛИФ, и спектр затухания флуоресценции образуют «визитную карточку» исследуемого вещества, которая составляет т. н. частотно - временной портрет объекта наблюдения, который формируется в памяти в виде цифрового вектора. Спектр ЛИФ нефти и пяти нефтепродуктов: 1. Солярное масло, 2. Дизельное топливо, 3. Керосин, 4. Бензин А-72, 5. Бензин А-95, 6. Сырая нефть.
РАСПОЗНАВАНИЕ ОБРАЗОВ В СЛУЧАЕ ЛИФ LF(λ) с возбужденного уровня r на нижние уровни g - средняя интенсивность в каждой полосе; - положение максимального значения интенсивности в полосе ; - отношение максимумов интенсивностей для различных полос; - скорости нарастания интенсивности в полосах; Рис. Спектры времен затухания флуоресцентного излучения нефтепродуктов 1. Солярное масло; 2. Дизельное топливо; 3.Керосин; 4. Бензин А-72 Полный вектор, задающий исследуемый объект в пространстве признаков, должен содержать члены, определяемые условиями проведения зондирования; профиль излучения каждой компоненты в спектре флуоресценции
Фоны и шумы Представление объекта в виде вектора характеристических параметров позволяет использовать математические методы распознавания для проведения фильтрации шумов и фона, которые тоже могут быть представлены соответствующими векторами (полями признаков, определяющих классы фонов и шумов). На языке «распознавания образов» фоны и шумы являются сценами В дальнейшем, разработанные критерии правдоподобия, позволяют сформировать заключение об идентификации объекта и о рисках ошибочных решений. Риски ошибочных решений определяются рядом обстоятельств – использованием неоптимального словаря признаков, применением алгоритмов распознавания основанных на той или иной «мере близости», а также проведением распознавания в условиях противодействия.
ФОНЫ
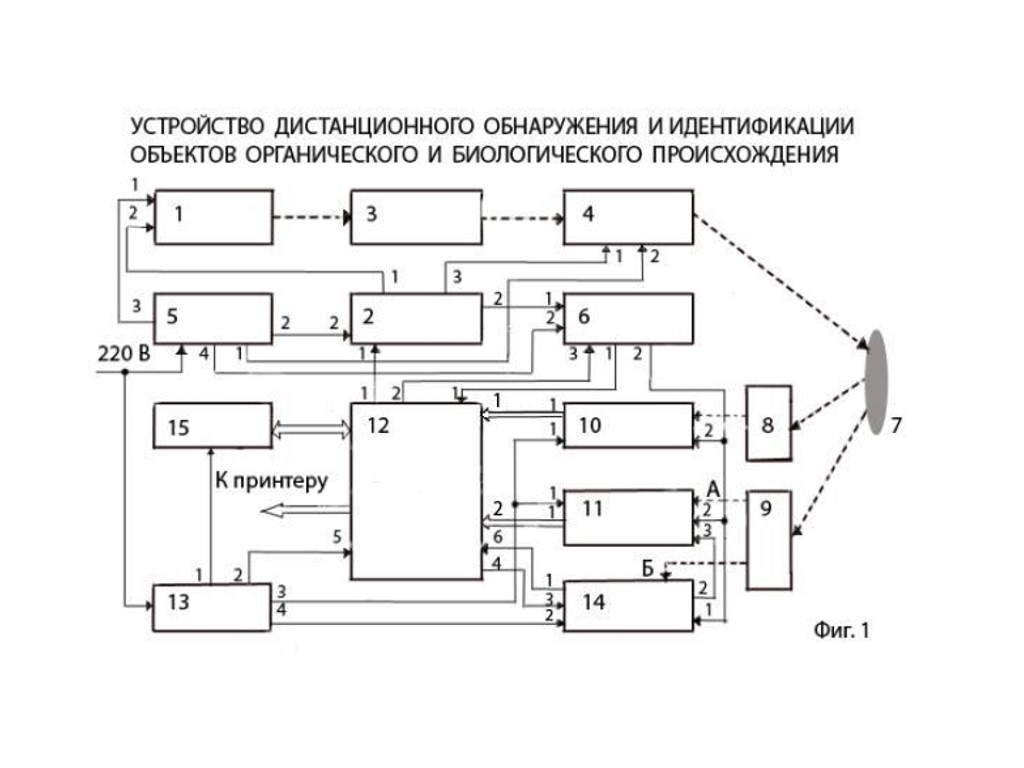
Техническое решение лидарного комплекса Предлагаемый подход к идентификации объектов решает вопросы автоматизации процесса распознавания, позволяет сформировать базы данных по фонам, шумам и веществам, представляющим интерес, значительно ускоряет сам процесс распознавания. По мере накопления баз данных и оптимизации алгоритмов распознавания появляется возможность введения самообучающейся системы распознавания.
Реализация Обработка спектров Смысл алгоритма обработки заключается в следующем : Устройство (будет описано ниже) анализирует спектры по нескольким параметрам таким как: Амплитуда спектра Первая производная на участке Отношение амплитуд Ширина пика Время затухания флюоресценции Спектры ЛИФ нефтепродуктов 1 --- солярное масло 2 --- дизельное топливо 3 --- керосин 4 --- бензин фирмы ESSO
Экспериментально наблюдаемый сигнал КР определяется числом зарегистрированных фотоэлектронов на выходе фотоприемника Nе N0 – число фотонов в лазерном импульсе п —количество импульсов, а(λ0), а(λ)—коэффициенты поглощения атмосферы на длине волны лазера λ0 и смещенного излучения λ ; κ1(λ)—коэффициент, учитывающий потери на поглощение и отражение в приемной оптике; η1(λ)—квантовая эффективность фотоприемника (с учетом сбора электронов с фотокатода); S— действующая площадь приемного зеркала; dσ /dΩ —дифференциальное сечение рассеяния исследуемого газа; κ®- геометрический фактор лидара; ρ®— концентрация исследуемого вещества (число молекул в единице объема); R1 и R2 — границы исследуемой атмосферы.
Минимально обнаруживаемая концентрация где N Ф; Nт — шумовой сигнал в фотоэлектронах, вызванный фоном неба и темновым током ФЭУ за время измерения сигнала КР Т=nt , t = 2(R2—R1)с — время измерения сигнала, приходящееся на один лазерный импульс, с — скорость света. Число фотоэлектронов, вызванных излучением фона неба, находится из соотношения: где κ(λ) — коэффициент, учитывающий суммарные потери фонового излучения в оптической части измерительного устройства; Δλ — ширина регистрируемого участка спектра; Ω — телесный угол сбора свечения неба; В(λ.)—спектральная плотность энергетической яркости фона неба; hν — энергия фотона в регистрируемом участке спектра.
Eсли концентрация ρ в пределах зондируемого участка R2-R1 постоянна, то Для определения МОК измеряемого загрязнителя необходимо задаться требуемым отношением с/ш (или требуемой точностью измерения). Из выражения определяется необходимое минимальное число фотоэлектронов Nе мин Чувствительность и радиус действия дистанционного анализатора на базе метода КР определяются в основном оптимальным выбором рабочих параметров всех его узлов. Рассмотрим пути получения чувствительности уровня ПДК, при этом для оценки принимаем требования проведения измерений в дневное время на расстоянии не превышающем 50 м. Для оценки примем отношение с/ш равным 3
От длины волны в сильной степени зависят такие величины, как квантовая эффективность фотоприемника η1(λ), сечение рассеяния молекул dσ /dΩ и величина фона свечения дневного неба. во всех отношениях, предпочтительнее: - ближний ультрафиолет - область минимального поглощения излучения атмосферой (в диапазоне длин волн короче 300 нм спектральная плотность яркости фона неба B(λ) практически равна нулю из-за поглощения озоном в верхней атмосфере, а в области короче 250 нм начинает сказываться сильное поглощение атмосферным кислородом); - максимум квантового выхода для фотокатодов лежит в ближней УФ- и видимой областях спектра; зависимость дифференциального сечения КР для Q -ветви сероводорода (сдвиг -2611см -1) от длины волны λ0 возбуждающего лазерного излучения. Величина dσ /dΩ почти на порядок больше для λ0 =266 нм, чем для λ0=694 нм.
б) Согласно уравнению (18) принимаемый сигнал КР пропорционален эффективной площади приемного объектива S. Диаметр приемного объектива порядка 60 см, по предварительным оценкам, является оптимальным для получения необходимого сигнала с учетом стоимости оптики. Основными требованиями, предъявляемыми к устройству селекции спектральных линий, является большая светосила, 59,0 49,0 45,4 35,1 27,2 5,4 3,1 2,2 Дифференциалное сечение dσ /dΩ 10 30 , см2ср-1 273,2 285,2 291,6 312,6 334,9 391,3 617,8 680,7 Наблюдение (при отстройке -2611см -1) λ, нм 255 266 271 289 308 355 532 578 Возбуждение, λ0 , нм
Лидар должен обладать следующими тактико-техническими характеристиками: - лазерный передатчик в этом КР- лидаре должен излучать в ближней УФ области спектра, например, на 4- гармонике лазера на YAG: Nd, λ = 266 нм [5] (или другого лазера с генерацией в ближней УФ области спектра, допустимой является также 3-я гармоника YAG: Nd лазера, λ1=347,1 нм ), с пиковой мощностью до 500 кВт при длительности импульсов порядка 10 нс, ; - диаметр приемной оптики в этом КР- лидаре должен быть порядка 60 см; - в приемнике излучения КР сигнал должен накапливаться по 100- 200 импульсам лазерного передатчика; - подавление рассеянного света на несмещенной частоте должна быть порядка 106 - для расстояния до 50-100 м можно ожидать измерения концентраций на уровне ПДК, с отношением С/Ш =3.
Л12 - 15 - в геологоразведке, в медицине Возможные области применения комплекса лидара Комплекс предназначен для дистанционного исследования и идентификации в реальное время малых количеств веществ, органического происхождения, вплоть до уровня следов, в негерметичной упаковке при одновременной идентификации конечного числа объектов без разрушения последних. и кроме того , после доработки может найти применение: - для поиска утечек и источников токсичных веществ органического происхождения, а также веществ, имеющих летучие компоненты. - для поисковых и контролирующих служб по чрезвычайным ситуациям, - на таможне для контроля за контрабандными перемещениями таких объектов, в том числе животных и людей; для обнаружения многих взрывчатых веществ - для контроля состояния безопасности в местах скопления людей, причем, контроль может быть не выборочный а тотальный, в том числе и при перемещениях объекта в контролируемой зоне со скоростью пешехода.
Сфера применимости такого лидарного комплекса - исследование и контроль загрязняющих веществ в атмосфере; - непрерывный контроль состояния воздушной среды производственных помещений; - исследование по рассеиванию загрязняющих веществ, мониторинг загрязнения водоёмов и суши; - обнаружение нефтяных разливов, идентификация нефтепродуктов - дистанционный мониторинг состояния нефтепроводов - изучение перемещения водных масс с помощью красителей; - измерение температуры и солености воды; - исследовательские, поисковые и спасательные работы на море с борта летательных аппаратов и судов в любое время суток; - диагностика сточных и отстойных вод на содержание органических примесей и тяжелых металлов; - фоновые исследования углеводородов в море. - обнаружение косяков рыб. - исследование и идентификация в реальное время малых количеств веществ, органического происхождения, вплоть до уровня следов, в негерметичной упаковке при одновременной идентификации конечного числа объектов без разрушения последних в том числе: - для поиска утечек и источников токсичных веществ органического происхождения, а также веществ, имеющих летучие компоненты о -
для поисковых и контролирующих служб по чрезвычайным ситуациям, - на таможне для контроля за контрабандными перемещениями таких объектов, в том числе животных и людей; - для обнаружения многих взрывчатых веществ [5 ,11 ] - для контроля состояния безопасности в местах скопления людей, причем, контроль может быть не выборочный, а тотальный, в том числе и при перемещениях объекта в контролируемой зоне со скоростью пешехода, Сельскохозяйственное применение - диагностика недостаточности элементов минерального питания; - диагностика состояния растений после обработки гербицидами; - диагностика водного стресса; - определение фазы развития растений; - идентификация типов растительности; - изучение архитектоники растительности. - оперативное исследование состояния почв (степени засолённости, кислотности); - составление карт текущего состояния почв и растительности.
Оптико-механический пост станции «ОКА»
Некоторые характеристики объектов исследования Название Природа Действующее Элюент для ТСХН Ввещество Опий и Опий - свернувшийся сок Морфин, Смесь бензол-экстрактопийного или масличного кодеин,этанол-триэтнламинмаковоймака; тебаин(9:1:1) ;соломы экстракт маковой соломы - смесь этанол-средство, получаемое из диэтиловый эфир-маковой соломы путемаммиак (3:6:1) .экстракции наркотически активных алкалоидов водой или органическими растворителями Гашиш Средства,Тетрагидро-Бензол; толуол; приготавливаемые из каннабинол смесь гексан-конопли: диэтиловый эфир смесь смолы и пыльцы;(4:1). смесь верхушек конопли с наполнителями Героин Сиитетическое средство, Морфин Смесь бензол-производное морфинаэтанол-триэтиламин(9:1:1);смесь этанол-диэтиловый эфир-аммиак (3:6:1) Кокаин Порошок или паста, лсдСмесь этанол-получаемые из листьев аммиак (100:1.5); растения кока,смесь этилацетат-произрастающего в Южной -Америке пропиловый спиртаммиак (40:30:3);смесь ацетон-хлороформ-этанол(4:3:2); ацетон Вещество Морфин, кодеин,тебаин Тетрагидро-каннабинол Морфин лсд
Литература [1] Жутяева Т.К. //Локационные методы исследования объектов и сред в оптическом и акустическом диапазонах [2] Межерис З.//Лазерное дистанционное зондирование – Москва, Мир,1987, 550 с. [3] Романовский О.А., Лидарное зондирование метеопараметров атмосферы - тез. конф. «Лазеры измерения информация, .Петербург, 2006, 32 .с [4] Шандра Э., // Физические основы дистанционного зондирования,- Москва, Недра,1990, 208 с. [5] Брюховецкий А.П., Суетенко А.В.// Способ дистанционного обнаружения и идентификация объектов органического происхождения,- патент на изобретение № 2233438 / 2003125948, ,-26.08.2003 г. Россия [6] Зуев В.В., Романовский О.А., Харченко О.В. // Лидарные измерения молекулярной атмосферы и растительности, - труды 15 Межд. научн. конф. «Высокие технологии в биологии, медицине и геологии» - Новороссийск , 2007, 4-7 с [7] Брюховецкий А.П., .Бугаев Ю.Н., Суетенко А.В. //Распознавание образов и сцен при лазерном дистанционном зондировании объектов органического и биологического происхождения ,- труды 16 Межд. научн. конф. «Лазерно - информационные технологии в биологии, медицине и геологии» - Новороссийск , 2008, 118-119 с. [8] Меркурьев С.В., Привалов В.Е., Шеманин В.Г. – Лидар комбинационного рассеяния для зонди-рования молекул серосодержащих углеводородов в атмосфере/ Письма в ЖЕТФ 2000, т 26, вып.1, с. 45 – 49 [
[9] Малашин М.С., Каминский Р.П., Борисов Ю.Б. //Основы проецирования лазерных локационных систем, -Москва, Высшая школа 1983, 207 с. [10] Bryuhoveckij A., Bugaev J.,. Suetenko A, // Image and stage identification during laser remote sounding objects of an organic origin, Proc. SPIE, Vol. 7027, 702714 (2008); DOI:10.1117/12.822516 , p. 141-155 [11] Щербаков Г.Н. //Обнаружени скрытых объектов, - Москва, Арбат- Информ, 2004, 136 с. [12] Захаров В.П., Макурина О.М.., Тимченко Е.В.//Экологический мониторинг города на основе метода дифференциального обратного рассеяния излучения древесной культурой,- труды 16 Межд. научн. конф. «Лазерно - информационные технологии в биологии, медицине и геологии» - Новороссийск , 2008, 87 с. [13] Приезжев А.В., Тучин В.В.,. Шубочкин Л.П. // Лазерная диагностика в биологии и медицине- Москва,- Наука,- 1989, 238 с. [14] Воробьев В.И. // Оптическая локация для радиоинженеров,- Москва, Радио и связь,1983, 176 с. [15] Зуев В.Е. // Распространение лазерного излучения в атмосфере,- Москва, Радио и связь,1981, 288 с. [16] Горелик А.А., Скрыткин В.А. // Методы распознавания, - Москва, Высшая школа 1977, 222 с. [17] Measures R.M. //Lidar equation analysis? Appl. Optics, 16, 1072-1103 p., 1977 [
[18] Measures R.M., Garlic J. //Laser induced spectral signatures of relevance to environmental sensing, Can. J. Remote Sensing, 1, 95-102 p., 1975 [19] Ельяшевич М.А. //Атомная и молекулярная спектроскопия, - Москва, Физ-мат. лит.,1962, 889 с. [20] Брюховецкий А.П. // Проблемы использования лазерно индуцированной флуоресценции для дистанционной диагностики растительности и почв, - Петрозаводск, сб. «Экология и спектроскопия», 1992, с 43-52 [21] Зуев В.Е. //Лазер –метеоролог, Л. , Гидроиздат, 1974, 719 с [22] Ulaby FT., Moore RK// Microwave remote sensing, 1982, Addison Wesley reading Mass, v.1,2 [23] Горелик А.Л., Скрипник В.А.,// Методы распознавания, М.,Высшая школа, 1977, 222 с. [24] Вентцель Е.С. //Теория вероятностей, М., Физматгиз, 1964, 342 с. [25] Bryuhoveckij A., Bugaev J.,. Suetenko A, // Lidar complex for remote parameter measurement of soiling an organic origin and their identifications (SHERNA-LIDAR), Proc. SPIE, Vol. 6594, 65940I (2007); DOI:10.1117/12.725599. [26] Воронина Э.И., Привалов В.Е., Фотиади А.Э., Шеманин В.Г.//Лазерные приборы контроля радиоактивного загрязнения воздуха, Новороссийск Куб. ГТУ, 2009,Уч., пос.,60 с. [27] Брюховецкий А.П., .Бугаев Ю.Н., Суетенко А.В. //Формирование пространства признаков для решения задачи дистанционного распознавания образов молекулярных объектов, - труды 17 Межд. научн. конф. «Лазерно - информационные технологии в биологии, медицине и геоэкологии». Новороссийск , 2009, 112-113 с.