

1.3.2.ppt
- Количество слайдов: 27
 Кафедра Механики и Инженерной графики Теоретическая механика Тема 1. 3 Динамика Занятие 1. 3. 2. Первая и вторая задачи динамики
Кафедра Механики и Инженерной графики Теоретическая механика Тема 1. 3 Динамика Занятие 1. 3. 2. Первая и вторая задачи динамики
 Кафедра Механики и Инженерной графики Учебные вопросы: 1. Основные законы динамики 2. Дифференциальные уравнения движения материальной точки 3. Две основные задачи динамики
Кафедра Механики и Инженерной графики Учебные вопросы: 1. Основные законы динамики 2. Дифференциальные уравнения движения материальной точки 3. Две основные задачи динамики
. Материальная точка сохраняет состояние") Основные законы динамики v Закон инерции (первый закон динамики Ньютона). Материальная точка сохраняет состояние покоя или равномерного прямолинейного движения (относительно инерциальной системы отсчета) до тех пор, пока действие других тел (то есть приложенные к точке силы) не изменит это состояние. (Свойство сохранения скорости точки при отсутствии воздействия на нее называется инерцией, а движение точки при этих условиях – движением по инерции. )
Основные законы динамики v Закон инерции (первый закон динамики Ньютона). Материальная точка сохраняет состояние покоя или равномерного прямолинейного движения (относительно инерциальной системы отсчета) до тех пор, пока действие других тел (то есть приложенные к точке силы) не изменит это состояние. (Свойство сохранения скорости точки при отсутствии воздействия на нее называется инерцией, а движение точки при этих условиях – движением по инерции. )
 Основные законы динамики v Основной закон динамики (закон пропорциональности силы и ускорения, второй закон динамики Ньютона. ) при движении материальной точки ее ускорение относительно инерциальной системы отсчета пропорционально приложенной к точке силе и направлено по этой силе. v Принцип независимости действия сил. При одновременном действии точку нескольких сил каждая из них сообщает точке такое ускорение, какое она сообщила бы, действуя одна. v Закон взаимодействия (равенства действия и противодействии, третий закон динамики Ньютона). Две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой, соединяющей эти точки, в противоположные стороны.
Основные законы динамики v Основной закон динамики (закон пропорциональности силы и ускорения, второй закон динамики Ньютона. ) при движении материальной точки ее ускорение относительно инерциальной системы отсчета пропорционально приложенной к точке силе и направлено по этой силе. v Принцип независимости действия сил. При одновременном действии точку нескольких сил каждая из них сообщает точке такое ускорение, какое она сообщила бы, действуя одна. v Закон взаимодействия (равенства действия и противодействии, третий закон динамики Ньютона). Две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой, соединяющей эти точки, в противоположные стороны.
 Вопрос 2. Дифференциальные уравнения движения материальной точки Рассмотрим подробнее основной закон динамики (закон пропорциональности силы и ускорения, второй закон Ньютона), а именно, запишем его математически:
Вопрос 2. Дифференциальные уравнения движения материальной точки Рассмотрим подробнее основной закон динамики (закон пропорциональности силы и ускорения, второй закон Ньютона), а именно, запишем его математически:
 Дифференциальные уравнения движения материальной точки z M a z k j 0 i x y x F y
Дифференциальные уравнения движения материальной точки z M a z k j 0 i x y x F y
 Дифференциальные уравнения движения материальной точки
Дифференциальные уравнения движения материальной точки
 Дифференциальные уравнения движения материальной точки
Дифференциальные уравнения движения материальной точки
 Общие указания к решению прямой и обратной задачи. Порядок решения: 1. Составление дифференциального уравнения движения: 1. 1. Выбрать систему координат – прямоугольную (неподвижную) при неизвестной траектории движения, естественную (подвижную) при известной траектории, например, окружность или прямая линия. В последнем случае можно использовать одну прямолинейную координату. Начало отсчета совместить с начальным положением точки (при t = 0) или с равновесным положением точки, если оно существует, например, при колебаниях точки. n 1. 2. Изобразить точку в положении, соответствующем произвольному моменту времени (при t > 0) так, чтобы координаты были положительными (s > 0, x > 0). При этом считаем также, что проекция скорости в этом положении также положительна. В случае колебаний проекция скорости меняет знак, например, при возвращении к положению равновесия. Здесь следует принять, что в рассматриваемый момент времени точка удаляется от положения равновесия. Выполнение этой рекомендации важно в дальнейшем при работе с силами сопротивления, зависящими от скорости. 1. 3. Освободить материальную точку от связей, заменить их действие реакциями, добавить активные силы. 1. 4. Записать основной закон динамики в векторном виде, спроецировать на выбранные оси, выразить задаваемые или реактивные силы через переменные время, координаты или скорости, если они от них зависят.
Общие указания к решению прямой и обратной задачи. Порядок решения: 1. Составление дифференциального уравнения движения: 1. 1. Выбрать систему координат – прямоугольную (неподвижную) при неизвестной траектории движения, естественную (подвижную) при известной траектории, например, окружность или прямая линия. В последнем случае можно использовать одну прямолинейную координату. Начало отсчета совместить с начальным положением точки (при t = 0) или с равновесным положением точки, если оно существует, например, при колебаниях точки. n 1. 2. Изобразить точку в положении, соответствующем произвольному моменту времени (при t > 0) так, чтобы координаты были положительными (s > 0, x > 0). При этом считаем также, что проекция скорости в этом положении также положительна. В случае колебаний проекция скорости меняет знак, например, при возвращении к положению равновесия. Здесь следует принять, что в рассматриваемый момент времени точка удаляется от положения равновесия. Выполнение этой рекомендации важно в дальнейшем при работе с силами сопротивления, зависящими от скорости. 1. 3. Освободить материальную точку от связей, заменить их действие реакциями, добавить активные силы. 1. 4. Записать основной закон динамики в векторном виде, спроецировать на выбранные оси, выразить задаваемые или реактивные силы через переменные время, координаты или скорости, если они от них зависят.
 2. Решение дифференциальных уравнений: 2. 1. Понизить производную, если уравнение не приводится к каноническому (стандартному) виду. например: или 2. 2. Разделить переменные, например: 2. 3. Если в уравнении три переменных, то сделать замену переменных, например: или и затем разделить переменные. 2. 4. Вычислить неопределенные интегралы в левой и правой частях уравнения, например: Используя начальные условия, например, t = 0, vx = vx 0, определить постоянную интегрирования: Замечание. Вместо вычисления неопределенных интегралов можно вычислить определенные интегралы с переменным верхним пределом. Нижние пределы представляют начальные значения переменных (начальные условия). Тогда не требуется отдельного нахождения постоянной, которая автоматически включается в решение, например: 2. 5. Выразить скорость через производную координаты по времени, например, и повторить пункты 2. 2 -2. 4 Замечание. Если уравнение приводится к каноническому виду, имеющему стандартное решение, то это готовое решение и используется. Постоянные интегрирования по прежнему находятся из начальных условий.
2. Решение дифференциальных уравнений: 2. 1. Понизить производную, если уравнение не приводится к каноническому (стандартному) виду. например: или 2. 2. Разделить переменные, например: 2. 3. Если в уравнении три переменных, то сделать замену переменных, например: или и затем разделить переменные. 2. 4. Вычислить неопределенные интегралы в левой и правой частях уравнения, например: Используя начальные условия, например, t = 0, vx = vx 0, определить постоянную интегрирования: Замечание. Вместо вычисления неопределенных интегралов можно вычислить определенные интегралы с переменным верхним пределом. Нижние пределы представляют начальные значения переменных (начальные условия). Тогда не требуется отдельного нахождения постоянной, которая автоматически включается в решение, например: 2. 5. Выразить скорость через производную координаты по времени, например, и повторить пункты 2. 2 -2. 4 Замечание. Если уравнение приводится к каноническому виду, имеющему стандартное решение, то это готовое решение и используется. Постоянные интегрирования по прежнему находятся из начальных условий.
 Вопрос 3. Две основные задачи динамики Первая задача динамики: зная массу точки m и уравнения ее движения найти модуль и направление равнодействующей сил, приложенных к точке. x=f 1(t), y=f 2(t), z=f 3(t),
Вопрос 3. Две основные задачи динамики Первая задача динамики: зная массу точки m и уравнения ее движения найти модуль и направление равнодействующей сил, приложенных к точке. x=f 1(t), y=f 2(t), z=f 3(t),
 Две основные задачи динамики 1. Определяют проекции ускорения на координатные оси, то есть вторые производные от соответствующих координат x, y, z 2. Подставляют полученные производные в дифференциальные уравнения движения материальной точки и находят проекции на оси координат равнодействующей сил 3. Модуль равнодействующей следующим образом вычисляют
Две основные задачи динамики 1. Определяют проекции ускорения на координатные оси, то есть вторые производные от соответствующих координат x, y, z 2. Подставляют полученные производные в дифференциальные уравнения движения материальной точки и находят проекции на оси координат равнодействующей сил 3. Модуль равнодействующей следующим образом вычисляют
 Две основные задачи динамики
Две основные задачи динамики
 Две основные задачи динамики
Две основные задачи динамики
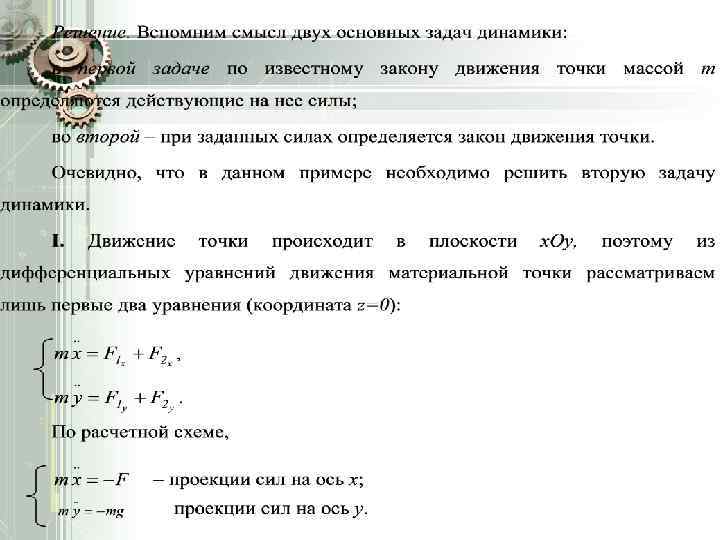
: зная силы, действующие на материальную точку,") Две основные задачи динамики Вторая задача динамики (основная): зная силы, действующие на материальную точку, её массу m, а так же начальное положение точки и её начальную скорость, получить уравнения движения точки.
Две основные задачи динамики Вторая задача динамики (основная): зная силы, действующие на материальную точку, её массу m, а так же начальное положение точки и её начальную скорость, получить уравнения движения точки.
 Две основные задачи динамики
Две основные задачи динамики
 Две основные задачи динамики
Две основные задачи динамики
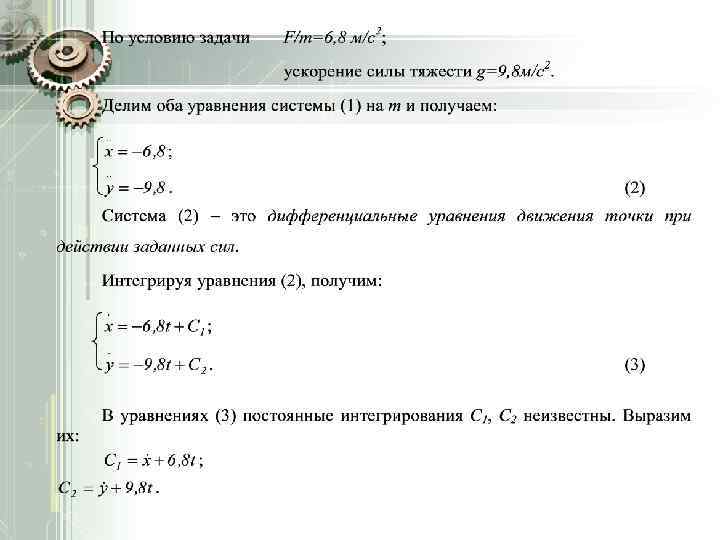
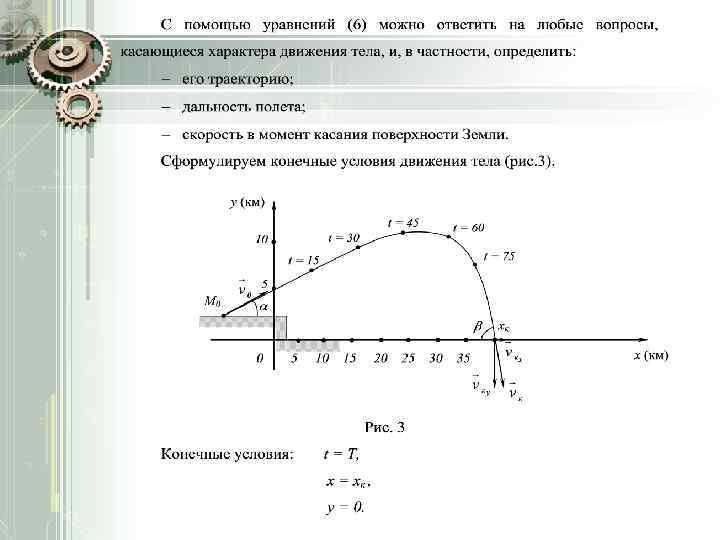
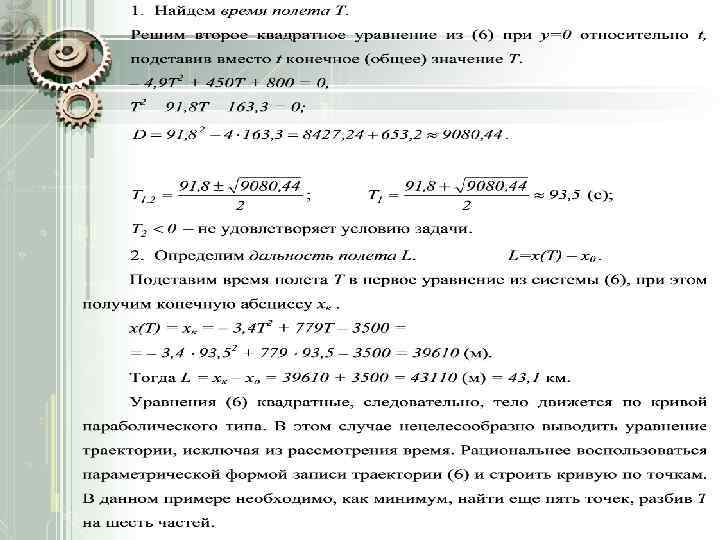
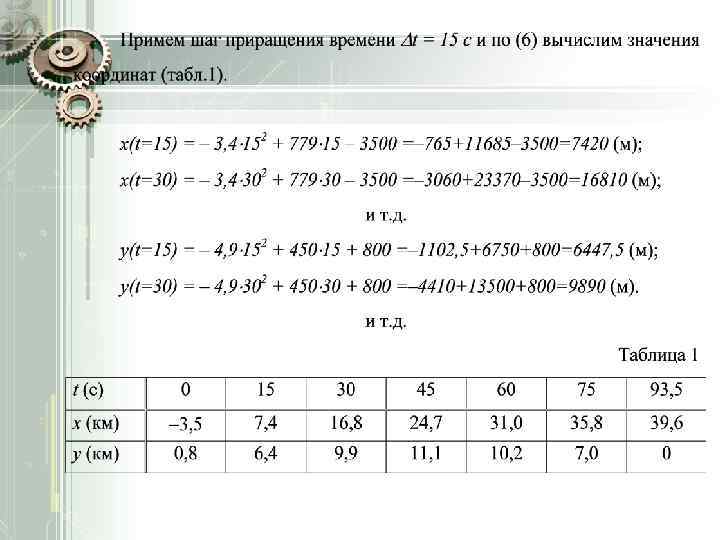
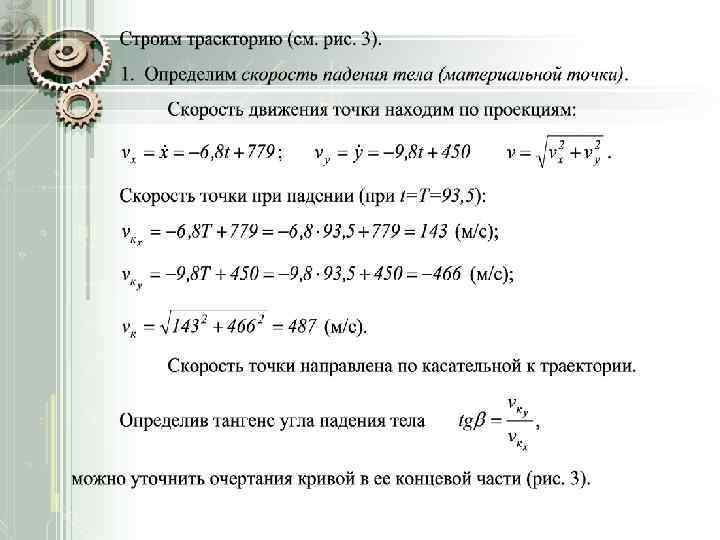
 Пример 1 Материальная точка М запущена с высоты 2 h под углом к горизонту со скоростью. Определить уравнения движения, траекторию, дальность полета и скорость точки при падении. y Дано: M b =3500 м; h =400 м; Q =30 ; v 0 =900 м/c; M 0 2 h O b x 6, 8 м/c 2
Пример 1 Материальная точка М запущена с высоты 2 h под углом к горизонту со скоростью. Определить уравнения движения, траекторию, дальность полета и скорость точки при падении. y Дано: M b =3500 м; h =400 м; Q =30 ; v 0 =900 м/c; M 0 2 h O b x 6, 8 м/c 2

 Задание на самоподготовку 1. Изучить материал конспекта. 2. Проработать методику решения первой и второй основных задач динамики.
Задание на самоподготовку 1. Изучить материал конспекта. 2. Проработать методику решения первой и второй основных задач динамики.
 Литература 1. Яблонский А. А. , Никифорова В. М. Курс теоретической механики. СПб. : Лань, 2004 – 768 с. 2. Куприянов Д. Ф. , Метальников Г. Ф. Техническая механика. М. , 1995 г. 3. Цывильский В. Л. Теоретическая механика. М. : Высш. шк. , 2004. – 343 с.
Литература 1. Яблонский А. А. , Никифорова В. М. Курс теоретической механики. СПб. : Лань, 2004 – 768 с. 2. Куприянов Д. Ф. , Метальников Г. Ф. Техническая механика. М. , 1995 г. 3. Цывильский В. Л. Теоретическая механика. М. : Высш. шк. , 2004. – 343 с.