РТС_1-7_2011+.ppt
- Количество слайдов: 90



К лекции № 1 Радиотехнические системы Общесистемные понятия и определения Система – объект любой природы, обладающий выраженным «системным» свойством, которого не имеет ни одна из частей системы при любом способе ее разбиения и не выводимом из свойств ее частей. «Системное» свойство отличатся от свойств отдельных элементов и характеризуется связями соединяющими в целое все ее элементы. Системные свойства: уникальность, слабопредсказуемость, негэнтропийность (целенаправленность). Части системы, имеющие «системные» свойства называют подсистемами. Объединение нескольких систем – комплекс (надсистема). Элемент системы – это ее часть с известными свойствами. Связи между элементами системы служат для обмена информации, энергией, веществом и т. п. Большая система состоит из однотипных элементов и связей. Сложная – из разнотипных. Открытая система связана со средой, закрытая – не связана со средой. Радиотехнические системы (РТС) – сложные системы, представляющие собой совокупность устройств, предназначенных для передачи, извлечения, обработки и накопления информации с использованием радиоволн. Основные показатели РТС: Назначение, точность, разрешающая способность, дальность действия, помехоустойчивость, диапазон частот, ЭМС, скрытность, устойчивость к внешним воздействиям, стоимость, Г/М/В, функциональная надежность, перспективность.
, навигации (РНС) и радиоэлектронной борьбы (РЭБ) относятся к радиотехническим системам извлечения")
РТС локации (РЛС), навигации (РНС) и радиоэлектронной борьбы (РЭБ) относятся к радиотехническим системам извлечения и преобразования информации с использование методов местоопределения положения объектов в пространстве. РЛС и их классификация По способу локации различают РЛС активные (с пассивным или активным ответом), полуактивные и пассивные. АКТИВНАЯ РЛС. Принцип ее действия основан на излучении в направлении на объект прямого (первичного) радиолокационного сигнала и приеме возникающего вследствие этого обратного (вторичного) сигнала от объекта. По способу получения обратного сигнала активные РЛС подразделяются на: РЛС С ПАССИВНЫМ ОТВЕТОМ, в которых обратный сигнал образуется вследствие отражения электромагнитной энергии от объекта; РЛС С АКТИВНЫМ ОТВЕТОМ, в которых обратный сигнал образуется в результате ретрансляции (переизлучения) прямого сигнала на объекте. ПОЛУАКТИВНАЯ РЛС. Принцип ее действия основан на излучении зондирующих сигналов из одной точки пространства, а приеме отраженных сигналов в другой точке пространства. ПАССИВНАЯ РЛС не имеет передающего устройства и в качестве информационного сигнала использует естественное излучение объектов. РЛС также классифицируются диапазону волн, виду сигналов, числу каналов обработки информации, количеству измеряемых координат, способу измерения и отображения координат, функциональному назначению и другим характеристикам.
 радиоэлектронной техники, принятые в США, состоят из букв и цифр, например: AN/FPC-3.")
Обозначения (военной) радиоэлектронной техники, принятые в США, состоят из букв и цифр, например: AN/FPC-3. Буква А означает принадлежность к армии или авиации, а буква N - к флоту. Буквы, следующие за косой чертой, означают: 1 -я - место установки аппаратуры, 2 -я - вид аппаратуры, 3 -я - назначение аппаратуры. Число, стоящее после тире, означает номер разработки аппаратуры. Место установки аппаратуры: А - на самолетах; B - на подводных лодках; C - транспортируемая на самолетах (редко используется); D - на беспилотных объектах; F - наземная (стационарная); G - на земле общего пользования (состоит из двух и более независимых частей); K - на амфибиях; M - на наземных подвижных объектах, предназначенных для транспортирования только данной аппаратуры; P - переносная (человеком или вьючная); S - на кораблях; T - на земле (транспортабельная); U - общего применения (состоит из двух или более самолетных, корабельных или наземных независимых частей); V - на наземных подвижных объектах (боевых машинах: танках, самоходных установках, бронетранспортерах и т. п. ); W - на водной поверхности или под водой.
; D -")
Вид аппаратуры: A - инфракрасная; B - голубиная; C - высокочастотная (проводная); D - дозиметрическая; E - ядерная; F - фотографическая; G - телеграфная; I - переговорная, вещательная; J - электромеханическая (не входящая в другие разделы); K - телеметрическая; L - разведки и РЭП; M - метеорологическая; N - звуковая; P - радиолокационная; Q - гидроакустическая; R - радиосвязная; S - специальная (например, магнитная) или комбинация различных типов; T - телефонная проводная; V - визуальная и использующая видимый участок спектра; X - факсимильная или телевизионная (фотокопировальная); W - военная (специфические военные системы, не входящие в другие разделы); Y - обработки данных. Назначение аппаратуры: A - вспомогательная деталь установок; B - бомбардировочная;
; D - пеленгаторная и (или) разведывательная; E -")
C - связная (приемная и передающая); D - пеленгаторная и (или) разведывательная; E - для выбрасывания или сбрасывания на парашюте; G - наведение орудий или прожекторов; H - записывающая и/или воспроизводящая (фотографическая, метеорологическая, звуковая); M - эксплуатационная, испытательная, инструментальная; N – навигационная (радиомаяки, радиовысотомеры, радиокомпасы, системы посадки); P - для воспроизведения звука и изображения; Q - специальная или комбинированного назначения; R - приемная, пассивное обнаружение; S - обнаружение целей и (или) определение дальности и азимута; T - передающая; W - для телеуправления; X - для опознавания и идентификации. Радионавигационные системы также классифицируются по способу определения (собственного) местоположения на: позиционные (угломерные, дальномерные, разностно-дальномерные и комбинированные), системы счисления пути, обзорносравнительные системы. По виду несущего информацию сигнала: амплитудные, временные, частотные, фазовые. По диапазону волн (аналогично РЛС). По дальности действия - на системы ближней, дальней и глобальной навигации.

К лекции № 1 Радиотехнические системы Методы определения координат в РТС Системы координат. Местоположение объекта определяется положением центра масс в некоторой системе координат. Местная система координат с началом в т. расположения антенны РЛС. Применяется при расстояниях R несколько сотен км. Глобальные системы координат (широта и долгота, высота) применяют в глобальных РТС (СРНС), т. е. при большой дальности. Y Y Север Цель R α β H H β α Восток Z Наземная РЛС Цель R Бортовая РЛС H H X
 будут: D –")
Система координат, принятая в радиолокации. Сферическими координатами объекта наблюдения (точка М) будут: D – радиус – вектор (дальность), φаз – долгота (азимут), φум – угол места, дополняющий полярное расстояние q до 90° (jум = 90° - q). В цилиндрической системе положение объекта определяется аппликатой z (высота Н) и полярными координатами φаз и ρ (горизонтальная дальность Dг) проекции точки М на плоскость х. Оy.

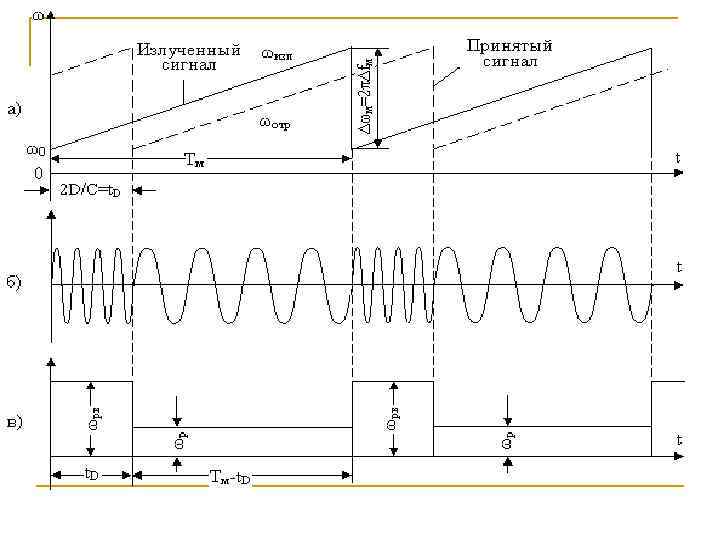
РАДИОЛОКАЦИОННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ Решают часть задачи местоопределения объектов. Вводятся условия прямолинейности и постоянства скорости распространения радиоволн. Радиодальнометрия основана на явлении запаздывания электромагнитных волн при их распространении в пространстве и измерении параметра, зависящего от запаздывания. В зависимости от измеряемого параметра основными являются импульсный, частотный и фазовый методы дальнометрии. Импульсный (амплитудный) метод измерения дальности. Различие терминов энергетическая и однозначно определяемая дальность. При амплитудном методе измерения определяется время запаздывания характерного изменения амплитуды принимаемого радиолокационного сигнала. Из различных видов модуляции излучаемых колебаний наиболее употребительной является импульсная. Передатчик станции генерирует радиоимпульсы длительностью τи с периодом повторения ТП. Антенный переключатель (АП) подсоединяет антенну к передатчику на время генерации импульса и к приёмнику на всё остальное время. Отражённые импульсные сигналы запаздывают на время t 3; на вход приёмника поступают и колебания передатчика и отражённые сигналы.

Функциональная схема импульсного измерителя дальности

- длительность зондирующего импульса, - период повторения зондирующих импульсов, - скважность последовательности зондирующих импульсов.
")
Кристиан Доплер (1803 – 1853)

Достоинства импульсных дальномеров: 1. возможность построения РЛС с одной антенной; 2. простота отсчета дальности; 3. возможность одновременного измерения дальности многих целей (многоканальность по дальности); Недостатки импульсного метода: 1. необходимость использования передатчиков с большой импульсной мощностью; 2. наличие «слепой» зоны по дальности (невозможность измерения малых дальностей, связанной с длительностью излучаемых импульсов и временем протекания переходных процессов в антенном переключателе); 3. Неоднозначность измерения дальностей, превышающих критической значение, связанное с периодом повторения радиоимпульсов.

ФАЗОВЫЕ МЕТОДЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ Фазовые методы основаны на измерении разности фаз излучённых и принятых синусоидальных радиосигналов, вызванной задержкой распространения радиоволн. Объект локации φ1 Передатчик Измеритель разности фаз ψ φ2 Измеренная дальность Приемник Пусть фаза при отражении не меняется, тогда
. Недостатки")
Достоинство фазового метода состоит в простоте структуры измерительного устройства (но при двух антеннах). Недостатки фазового метода: 1 - отсутствует разрешение по дальности, так как одновременно сигналы двух целей раздельно не наблюдаются, т. к. измерения фазовых сдвигов в фазометрическом устройстве возможно только в пределах 2π, в результате диапазон однозначно измеряемой дальности не превышает единиц метров; 2 - необходимы две антенны; 3 - чувствительность приёмника снижается вследствие просачивания излучения передатчика. Известен вариант двухчастотного фазового дальномера, решающий задачу неопределенности фазы сигнала при отражении). Для этого в РЛС включает два генератора высокочастотных колебаний и два приёмника, работающих соответственно на частотах f 1 и f 2. Колебания этих генераторов подводятся к передающей антенне, а также к первому смесителю; с выхода приёмников два сигнала воздействуют на второй смеситель.

Частотный метод измерения дальности. Основан на измерении разности частот излучённых и принятых синусоидальных радиосигналов, вызванной задержкой распространения радиоволн. Объект локации ЧМГ Пр-к ИЧБ Смеситель АД
 Δf/2 f 0 fб(t) t 0 +t 3 t 0+T+t 3 t t")
f(t) Δf/2 f 0 fб(t) t 0 +t 3 t 0+T+t 3 t t

Мгновенное значение частоты биений непостоянно, т. к. период модуляции Т < ∞. Поэтому измеряется средняя частота биений, что неизбежно вносит методическую ошибку в измерения.

Измерение частоты биений. Необходимо подсчитать число биений за период модуляции. Один из способов основан на счете импульсов, число которых за период Т должно быть пропорционально дальности: -дискретность отсчета Дальности. модуляционная длина волны. Другим вариантом измерения является использование анализатора спектра частоты биений. Спектроанализатор параллельного типа эквивалентен гребенке из m узкополосных фильтров, перекрывающих диапазон изменения частоты биений (диапазон дальностей).

Спектр частоты биений дискретный, т. к. изменение частоты биений носит дискретный характер. Поэтому и отсчеты частоты носят дискретный характер. Частотный метод обладает разрешением по дальности, которое определяется девиацией частоты, т. е. шириной спектра излучаемого сигнала. Более сложной является задача измерения дальности до движущихся целей, т. к. при этом к частоте биений добавляется дополнительное смещение частоты Доплера. Эти частоты необходимо разделить. Совместное измерение дальности и скорости частотным методом Обозначим составляющие измеряемой частоты

Время распространения радиоволн от РЛС до цели и обратно .

Можно измерить две составляющие частоты, из них при введенном условии: большая – дальностная, а меньшая – скоростная. При критической скорости Vкр Если , то Поэтому для одновременно однозначных измерений дальности и скорости необходимо правильно выбрать частоту f 0 и Δf (первое определяет скоростную, а второе - дальностную составляющие). Нужно соблюдать условия: (Условие R)
. Погрешность измерения дальности - суммарная погрешность. Проблемы, возникающие при использовании частотного метода:")
(Условие V). Погрешность измерения дальности - суммарная погрешность. Проблемы, возникающие при использовании частотного метода: обеспечение линейности характеристики ЧМ-дальномера; обеспечение работы дальномера в условиях помех. Применяется двойная ЧМ и методы программно-управляемого уменьшения методической погрешности измерения дальности. В режиме автоматического сопровождения по дальности (АСД) применяются следящие измерители дальности, основанные на АПЧ.

Смеситель ЧМГ Генератор БС Фильтр ЧД Следящий частотный измеритель дальности

МЕТОДЫ ОБЗОРА ПРОСТРАНСТВА ПРИ ПОИСКЕ СИГНАЛОВ В РТС Важными параметрами являются время обзора, точность и разрешающая способность. • Последовательный метод. Используется одна антенна, а измерение осуществляется в процессе обзора ( «на проходе» ). Время обзора связано с дальность действия, точностью и р. с. Пусть Тогда Антенная система и опорно-поворотное устройство РЛС П-90 "Памир" При накоплении N импульсов (пачки) время обзора увеличивается в N раз. Применяют следующие типы обзора пространства: Круговой, секторный, винтовой, спиральный, растровый и конический. При круговом по азимуту. При секторном Период обзора связан с круговой скоростью вращения антенны.

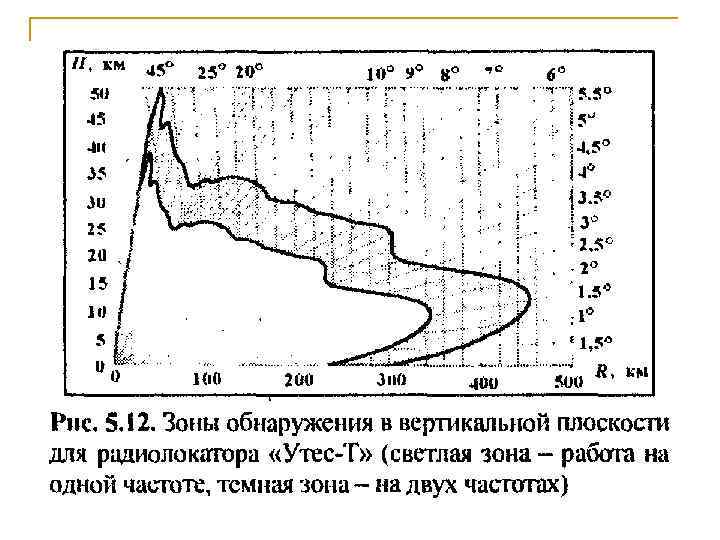
Для обзора пространства в РЛС используется оригинальный метод, сочетающий в себе электронное сканирование по углу места многолучевой диаграммой направленности антенны на разных несущих частотах и одновременное вращение по азимуту. Сканирование по углу места осуществляется фазовым способом в пределах от -3 град до 60 град. При этом в азимутальной плоскости за счет углочастотной зависимости излучателей на Шобразных волноводах одновременно формируется три прилегающих друг к другу луча. Вращение антенного устройства по азимуту осуществляется электромеханическим либо гидравлическим комбинированным приводом. С помощью электромеханического привода осуществляется вращение с постоянной скоростью 10 об/мин или 5 об/мин. Комбинированный привод обеспечивает переменную скорость вращения. Этот метод обзора пространства, совместно с набором сложнокодированных зондирующих сигналов, позволяет обеспечить одновременное обнаружение целей, летящих на больших и средних высотах, и маловысотных целей на фоне сильных отражений от подстилающей поверхности, в том числе в условиях воздействия пассивных и активных помех.

При секторном обзоре часть времени используется для обратного хода луча, поэтому Что нужно для уменьшения времени обзора? ……? Круговой метод обзора применяется обычно в двухкоординатных (дальность, азимут) РЛС.

Для измерения угла места применяют другие из перечисленных методов обзора пространства. Винтовой метод обзора - время на один оборот антенны.

Спиральный метод обзора пространства. Одновременно меняется угол между осью вращения и осью диаграммы направленности антенны. Используя двойноем перекрытии ДНА получим:

Растровый метод обзора пространства. Увеличить скорость обзора позволяют: применение ФАР, многоканальных методов обзора (многолучевые системы), методы адаптивного и программированного обзора, сочетание электронного и механического сканирования.

Конический обзор пространства. Является частным случаем спирального обзора при следующих условиях Применяется при автосопровождении целей в РЛ, а также источников излучения по угловым координатам.

Требования к методам обзора пространства : 1. Время обзора должно быть минимальным при заданных ширине ДНА и дальности действия станции и при обеспечении условия наблюдаемости отметки цели (отметок целей) на экранах индикаторов станции. 2. Обеспечение возможности быстрого перехода от поиска цели к сопровождению одной выбранной цели. Время перевода от поиска к сопровождению цели и наоборот должно быть минимальным (не превышать нескольких секунд). 3. Определение угловых координат цели с требуемой точностью. 4. Обеспечение возможности автоматизации процессов поиска и сопровождения цели. 5. При обзоре должно обеспечиваться требуемое отношение сигнал-шум, т. е. не должно быть потери дальности действия РЛС. Методы обзора пространства тесно связаны с методами определения угловых координат цели. В РЛС обнаружения целей в режиме поиска чаще всего используются винтовой, спиральный, растровый (телевизионный) методы обзора пространства. Растровый метод обзора пространства характеризуется быстрым перемещением луча антенны по углу места и медленным перемещением по азимуту. Время обзора при растровом методе составляет величину порядка 10 -20 с. Винтовой метод обзора пространства характеризуется относительно быстрым перемещением луча антенны по азимуту и медленным перемещением по углу места. Достоинствами винтового метода являются способность станции вести поиск без целеуказания, удобство наблюдения воздушной обстановки, простота технической реализации. Недостатками - большое время обзора зоны обнаружения. Время обзора может достигать 1 -3 мин. Спиральный метод обзора пространства характеризуется перемещением луча антенны по спирали вокруг оси антенны. Достоинством спирального метода является равномерное расширение зоны поиска во все стороны, что ведет к сокращению времени обзора. Время обзора при спиральном методе составляет 5 - 10 с. Спиральному методу присущи недостатки: необходимость предварительного целеуказания при поиске, изменение условий наблюдаемости отметок целей в процессе обзора (на внешних витках спирали количество импульсов, облучающих цель, будет меньше), сложность устройства перехода с поиска на автосопровождение.

Отражающие свойства целей Цель – рассеивающий объект или источник вторичного излучения. Причина рассеяния – резкое изменение электропроводности, диэлектрической и магнитной проницаемости среды распространения электромагнитных волн. Основные характеристики объектов, рассматриваемых в качестве радиолокационных целей: - отражающая способность, определяющая свойство цели переизлучать часть падающей на неё электромагнитной энергии; - закон распределения и спектр флуктуаций амплитуды (мощности) отражённого сигнала; - закон распределения и спектр флуктуаций фазового фронта отражённого сигнала (Фазовым фронтом называется поверхность, в любой точке которой отражённый сигнал имеет одну и ту же фазу). ; - траектория движения объекта. Эффективная отражающая площадь цели – это такая фиксированная поверхность, являющаяся изотропным и не поглощающим энергию переизлучателем, которая, будучи помещена в точку цели, создаёт у антенны РЛС такую же плотность потока мощности отражённого сигнала, как и реальная цель.

R
 возможен")
Все цели можно разделить на элементарные и сложные. Расчёт эффективной отражающей площади (ЭОП) возможен для ограниченного числа объектов простейшей формы, выполненных из однородного идеально отражающего материала: металлические шар, лист, диполь, уголковые отражатели. ЭОП сложных целей может быть определена экспериментальным путём или описана статистически вследствие сложности их конфигурации и случайных перемещений относительно РЛС. К сложным целям относится подавляющее большинство реальных целей. Сложные цели могут быть разделены на точечные и распределённые. Точечные цели – это цели, линейные и угловые размеры которых значительно меньше элементов разрешения РЛС по дальности и угловым координатам, а разность радиальных скоростей их крайних точек много меньше элемента разрешения по скорости. Примерами точечной цели могут служить самолёты корабли на больших удалениях от РЛС, искусственные спутники. Распределёнными целями называют такие цели, для которых указанные выше соотношения не выполняются. Распределённые цели могут быть поверхностными (земная поверхность) и объёмными (облако пассивных отражателей, гидрометеоры).

Наиболее простой является модель сферы рассеивания. Отражающая способность зависит от соотношения геометрических размеров радиуса сферы и длины волны r/λ. Характерно наличие 3 -х зон отражения: 1. зона рефракции (зона Френеля) r/λ<<1. 2. зона резонансного рассеяния r≈λ. 3. зона отражения r/λ>>1. Является основной в радиолокации. Плотность потока мощности определяется выражением Отражающие свойства целей определяется ЭПР S 0

- полная площадь рассеяния цели. - мощность отраженного сигнала На сфере радиуса R около приемной антенны S 2 - эффективная поверхность приемной антенны: Тогда на входе приемника присутствует сигнал, мощность которого

Выражение справедливо при обнаружении. При распознавании оно усложняется, т. к. для распознавания целей требуется большая мощность сигнала. Сложные точечные цели отражают совокупность парциальных сигналов, отраженных от локальных центров отражения. При зеркальном отражении наблюдается эффект блестящей точки (преобладающего отражателя). ЭПР реальной цели может быть определен: 1. экспериментально ; 2. на основе феноменологической модели. Рассматривается две модели – при отсутствии и наличии блестящей точки.

При наличии блестящей точки При m=0 распределение экспоненциальное, При m=1 приблизительно экспоненциальное, А при m>>1 - гауссовское с максимумом S 0/S 0 Отраженный от целей сигналы характеризуются временными и спектральными статистическими характеристиками: корреляционной функцией, спектральной плотностью мощности и др. характеристиками. Эти характеристики используются при синтезе и анализе систем обработки сигналов на фоне шумов и помех.

Тип отражателя Полуволновой отражатель длиной l=l/2=а Металлический лист площадью S=а 2, где а – сторона квадрата Расчётная формула Значение Sэфф, м 2 3, 44 а 2 14× 103 а 4 Металлический шар диаметром dш=а (причём а>4 l) 0, 78 а 2 Уголковый отражатель с треугольными гранями и длиной ребра lр=а 4, 7× 103 а 4 Уголковый отражатель с квадратными гранями и длиной ребра lр=а 42× 103 а 4

Цель , м 2 Истребитель 1… 5 Катер 100 Рубка подводной лодки 1 Малый корабль (до 200 т) 50… 200 Дальний бомбардировщик 15… 20 Средний корабль (до 3000 т) 3000… … 10000 Транспортный самолёт 50… 150 Большой корабль (свыше 10000 т) >20000 Головная часть баллистической ракеты 0, 2 Подводная лодка в надводном положении 140 Ракета 10… 15 Морской буй 1 Крылатая ракета 0, 1 Бомбардировщик 7… 10 Человек 0, 8… 1 Автомобиль, танк Артиллерийский снаряд 1 7… 30

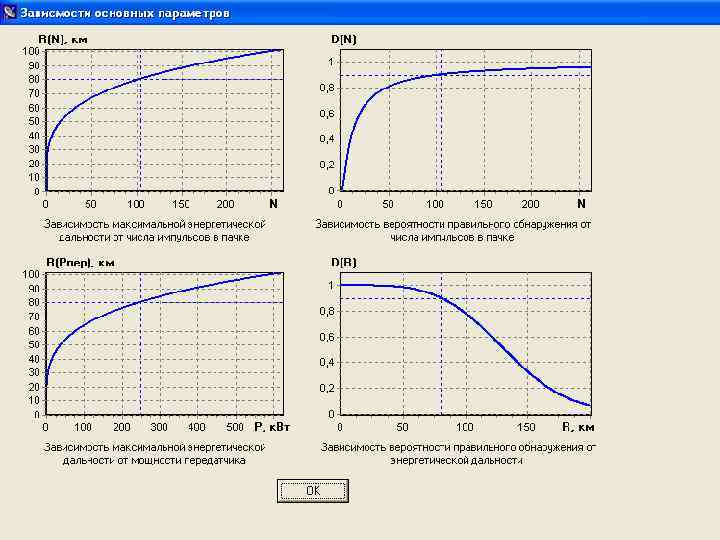
УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ Дальность действия РЛС в свободном пространстве Дальностью действия радиолокационной станции называется наибольшее расстояние между РЛС и целью, на котором ее обнаружение производится с заданными вероятностями правильного обнаружения и ложной тревоги. Дальность действия зависит от различных факторов: технических параметров станции, характеристик цели, условий распространения радиоволн, наличия и уровня различного рода помех и ряда других факторов, большинство из которых изменяется во времени случайным образом. График иллюстрирует характер зависимости относительного изменения дальности обнаружения от значения вероятности правильного обнаружения D при заданной ложной тревоге F. Вначале рассмотрим дальность действия РЛС без учёта влияния земной поверхности и атмосферы на распространение радиоволн, т. е. РЛС и цель находятся в «свободном» пространстве.

D F=const R 1/R 2 На входе приемника активной РЛС пороговая мощность сигнала при обнаружении: >qckp, Sa =S 2 – активная площадь антенны, Sс =S 0 – ЭПР цели.

Для РЛС с пассивным ответом Для РЛС с активным ответом Если РЛС использует импульсный сигнал и имеет одну антенну (на передачу –прием), то УДРО упрощается:

Дальность действия запросчика и ответчика активной РЛС должны быть эквивалентными. При прямолинейном распространении радиоволн дальность действия ограничивается зоной прямой видимости. Зона прямой видимости и учет сферичности земли для вычисления высоты цели: HГ – высота цели над горизонтальной поверхностью, ΔH – поправка на сферичность, R 3 – радиус Земли. Форма ДНА влияет на наблюдаемость целей на экране индикатора и поэтому в РЛС УВД и РЛС обзора земной поверхности используют ДН типа «cosec» . Влияние атмосферы и подстилающей поверхности на дальность действия РЛС Причина затухание и рефракция (отрицательная или положительная, а также сверхрефрация – явление атмосферного волновода). Градиент коэффициента преломления радиоволн для стандартной атмосферы: Эффективный радиус Земли, при котором высота траектории РРВ не меняется за счет рефракции, а сигнал распространяется прямолинейно. Радиус кривизны траектории в атмосфере RT :

На предельной дальности Или Более подробно влияние атмосферы и подстилающей поверхности Бакулев П. А. Радиолокационные системы, изд. 2007 г. , стр. 128 -133. (Изд. 2005 г. , стр. 122 -127).

Влияние подстилающей поверхности на дальность обнаружения низколетящих целей Т. к. , Тогда с учетом атмосферы и при малой высоте цели Зона обнаружения (зона видимости) строится в координатах «высота-дальность» С учетом влияния рефракции и подстилающей поверхности.

Пассивные помехи в РЭС 1. Пассивные помехи проявляются только при работе радиопередающих устройств. Пассивные помехи формируются за счет отражения зондирующих сигналов подавляемых РЛС от искусственно создаваемых отражателей (облаков дипольных отражателей, аэрозолей). 2. Источник пассивных помех пространственно расположен в непосредственной близости от обнаруживаемого объекта. 3. Мощность пассивных помех, как правило, значительно больше мощности шума на входе приемника РЛС. 4. Источник пассивной помехи, как правило, значительно медленнее перемещается в пространстве по сравнению с целью. 5. Пассивную помеху от белого гауссовского шума отличает узкополосность спектра. Эти отличия во временной области проявляются в структуре и параметрах корреляционной функции. Таким образом отражения типа пассивной помехи – узкополосный случайный процесс, центральная частота спектра которого незначительно смещена относительно частоты зондирующего сигнала (доплеровская составляющая спектра мала).

Дальность действия РЛС в условиях пассивных помех пространстве Pс=KSс, Pп=KSп , где Sс, Sп – эффективные площади рассеяния цели и помехи, > qckp - условие обнаружения цели, - потери приеме и обработке сигнала Т. к. , Pо – минимальная мощность сигнала на входе приемного устройства, необходимая для обнаружения цели с ЭПР Sс при заданных вероятностях правильного обнаружения D и ложной тревоги F (пороговая мощность).

kс, kп – коэффициенты передачи сигнала и помехи по мощности. μ= Kс max = N; kп=Pш/Pп, где N – число импульсов в пачке. . соответствует минимальной чувствительности приемника РЛС. Формулы для PР и R отражают взаимозависимость энергетических и вероятностных параметров РЛС в условиях помех.

Rmax 0 1 2 Sп Зависимость изменения ДРЛО от ЭПР источника пассивной помехи 1 – при действии пассивных помех; 2 - применении методов режекции пассивных помех (РФ).

Пассивные помехи «Виндоу» — средство создания пассивных радиолокационных помех, разработанное английскими специалистами во время Второй мировой войны для защиты бомбардировочной авиации. В техническом исполнении это были просто полоски металлизированной бумаги (станиоль), размер которых был подобран таким образом, чтобы они были видны в диапазоне частот от 3 до 6 ГГц. Именно в этом диапазоне работали немецкие локаторы. Весившие всего несколько килограмм эти полоски сбрасывались с бомбардировщиков при подлёте к цели. Полоски рассеивались в виде облака, которое на экране локатора выглядело подобием самолёта, что вводило операторов в заблуждение и мешало точному наведению на цель ночных истребителей, прожекторов и зенитных орудий. Первое испытание «Виндоу» было осуществлено королевскими ВВС во время ночного налёта на Гамбург 24 июля 1943 года. Результаты превзошли все ожидания. Возникла путаница между наземными системами наведения и истребителями в воздухе, которые не находили указанных им целей. В течение нескольких месяцев потери английских бомбардировщиков сократились наполовину и до конца войны, хотя число немецких истребителей возросло в четыре раза, потери не достигали такого уровня, как до применения «Виндоу» . Немцы были в недоумении, пока какой-то фермер не принёс в комендатуру странные полоски фольги, которые он собрал на своём участке.
 С помощью специальных отражающих объектов можно замаскировать реальные цели, изменить")
Противорадиолокационная маскировка (дезинформирующие помехи) С помощью специальных отражающих объектов можно замаскировать реальные цели, изменить радиолокационную карту отражения от местности, т. е. создать дезинформирующие помехи. Применяются уголковые отражатели, линзы Люнеберга и др. активные отражатели, являющиеся фактически ретрансляторами локационного излучения. Таким образом создают искусственные объекты в стороне от маскируемого объекта. Маскировка естественными пассивными помехами. Поперечный размер элемента разрешения зависит от дальности до РЛС и потому при маскировке цели пассивной помехой радиолокационный контраст снижается с увеличением дальности. Маскировка искусственными пассивными помехами. Основным средством создания искусственных пассивных помех, начиная с 30 -х г. является облако пассивных полуволновых отражателей. Расчет плотности облака пассивных помех. Наибольшее распространение получило использование дипольных противорадиолокационных отражателей – полуволновых отражателей (металлизированные бумажные ленты, фольга, синтетическое волокно). Характеристики: ЭПР, диапазонность, время развертывания, параметры спектра отражений).

ЭПР одиночного диполя определяется как . Θ –угол между осью диполя и направлением излучения. Т. к. ориентация диполей произвольна, то среднее значение ЭПР одного диполя равно Для облака из N диполей с коэффициентом разлета η<1 ЭПР имеет вид: Поперечный размер диполя влияет на коэффициент d формы. Для цилиндрических диполей А=L/d W Для прямоугольных диполей А=4 L/W , где W – ширина диполя. L Резонансная частота диполя должна совпадать с несущей частотой РЛС или быть ей кратной. При этом ЭПР – MAX. S/Sp При увеличении коэф-та формы зависимость более резкая. Недостаток – узкий частотный диапазон. 1 f/fp

Используют диполи разной длины. Обычно длина диполя выбирается несколько меньшей, чем λ/2 и степень укорочения также зависит от поперечных размеров d. Если концентрация диполей в единице объема V , то ЭПР одного элемента разрешения Среднее число диполей на длину элемента разрешения где nn– число одновременно сбрасываемых пачек диполей, ΔRn – расстояние между соседними пачками диполей (произведение скорости ПП на интервал сбрасывания). Автомат сбрасывания электромеханического, пневматического или пиротехнического типа. Диспенсеры нарезают диполи на основе данных радиолокационной разведки.
 на тросе L< 10 km. УО")
Наиболее просты буксируемые ловушки (линзы Люнеберга, уголковые отражатели) на тросе L< 10 km. УО бывают круглые, с прямоугольными и угловыми гранями. - треугольный уголковый отражатель

Линзы Люнеберга представляют собой диэлектрические шары с переменным коэффициентом преломления и внутренней кольцевой металлизацией, от которой сфокусированная волна отражается. Конструкция линзы предложена американским учёным Р. К. Люнебергом (Luneberg) в 1944. Они применяются в радиолокационных устройствах сантиметрового диапазона волн. Имеют сферическую или цилиндрическую форму. Коэффициент преломления материала линзы не остаётся постоянным по всей линзе, а зависит от расстояния до её центра (сферическая Л. л. ) или оси (цилиндрическая Л. л. ). Эта зависимость подбирается так, что после прохождения через линзу фронт волны получается плоским. Перемещением облучателя по поверхности линзы можно практически изменять направление максимального излучения в телесном угле до 2π при неизменной форме диаграммы направленности. Ширина луча зависит от ширины полосы металлизации. Для увеличения ЭПР используют несколько линз или уголковых отражателей. Для дальнейшего увеличения ЭПР применяют активные ловушки (ретрансляторы).

УВ-30 МК, устройство выброса пассивных помех Предназначено для защиты самолетов и вертолетов от управляемых ракет путем постановки помех их системам наведения и исполнительным механизмам в оптическом и радиодиапазонах электромагнитных волн. Технические особенности Режимы работы и управления: ручной, полуавтоматический, дежурный, ускоренный, встроенный контроль, тренаж. Типовое количество блоков выброса на носителе: от 2 до 8. Устройство выброса работоспособно во всем диапазоне воздействия динамических нагрузок и климатических факторов, соответствующих условиям полета носителей. Применение снаряженного устройства выброса обеспечивается в течение 30 суток без снятия и проведения дополнительных проверок и регулировок. Обеспечивается встроенный контроль работоспособности с идентификацией неисправности до сменного субблока, индикация фактического наличия (остатка) патронов и состояния устройства, полная ускоренная разгрузка снаряжения. Основные характеристики • Количество предварительно программируемых и оперативно выбираемых в полете программ отстрела - до 99 • Количество типов одновременно снаряженных патронов - 3 • Количество каналов отстрела - 3 • Общее количество патронов в устройстве (калибра 50 мм), шт при 2 -х блоках выброса - 28 при 8 -и блоках выброса - 112 • Общая масса устройства (неснаряженного), кг при 2 -х блоках выброса - 30 при 8 -и блоках выброса - 96


82 -мм корабельный комплекс выстреливаемых помех ПК-16 Предназначен для постановки радиолокационных и оптико-электронных отвлекающих ложных целей для противодействия управляемому оружию с радиолокационными и оптико-электронными системами наведения. В состав комплекса входят: - две 82 -мм пакетные пусковые установки (ПУ) ПК-16; - пульт управления; выпрямительное устройство. Комплекс размещается на надводных кораблях малого и среднего водоизмещения проектов 206 МР, 1135 М, 61 М, 1241, 1124 и др. Основные характеристики: Калибр ПУ, мм 82 Количество направляющих ПУ, шт. 16 Режимы стрельбы: ручной одиночными выстрелами автоматический: одиночными выстрелами с интервалом, с от 20 до 100 дискретно через 10 с очередями с темпом, выстр. /с 1 -2 интервал между очередями, с от 20 до 100 Количество снарядов в очереди, шт. 2 -3 Заряжание ручное Дальность постановки ложных целей, м от 200 до 1800

 значительно превышает мощность сигналов")
Методы защиты РЛС от пассивных помех Мощность пассивных помех (ПП) значительно превышает мощность сигналов целей и шумов. В результате перегружается приемник РЛС, маскируются сигналы целей, повышается вероятность ЛТ. Защита от ПП осуществляется в антенном тракте, тракте ВЧ, ПЧ (внутриимпульсная обработка), видеочастоты (межпериодная обработка). Создаются ДНА с «подрезанной» нижней кромкой, двухлучевые антенны с компенсацией, используется ВАРУ, МАРУ и БАРУ. Для защиты РЛС от пассивных помех в такте видеочастоты используются свойства, отличающие их от сигнала цели: 1. узкополосный характер спектра ПП; 2. центральная частота спектра ПП незначительно смещена относительно несущей частоты зондирующего сигнала. S(f) ц1 П АЧХ РФ ц3 ц2 Уровень шума f 0 --FД 1 f 0+FД 2 f f 0+FД 3 Рис. Спектры сигналов цели, пассивной помехи и шума, АЧХ режекторного фильтра

Спектрально-временные характеристики пассивных помех Корреляционная функция, спектральная плотность мощности, плотность распределения вероятностей. H 0 H 1

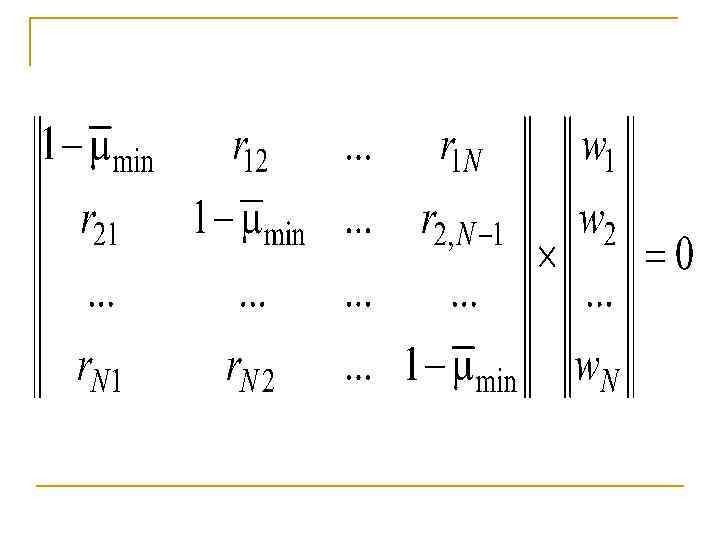
Q – матрица обработки обеляющего фильтра.

Об. Ф СФ Структура алгоритма оптимальной обработки сигнала на фоне ПП Если представить матрицу РФ СФ Структура алгоритма квазиоптимальной обработки сигнала на фоне ПП Оптимизация параметров РФ и анализ эффективности подавления ПП Критерии эффективности обработки сигнала на фоне аддитивной смеси белого шума и ПП.
 отношения сигнал-(помеха+шум) Критерий max КУ Коэффициент подавления помехи – усредненный по")
Коэффициент улучшения (КУ) отношения сигнал-(помеха+шум) Критерий max КУ Коэффициент подавления помехи – усредненный по доплеровской фазе сигнала КУ
 функция фильтра при k≤M, при k>M. Частотная характеристика фильтра связана с передаточной")
Передаточная (системная) функция фильтра при k≤M, при k>M. Частотная характеристика фильтра связана с передаточной функцией H(z) Импульсная характеристика фильтров ЧПК , m=0…M,

Реализация устройств подавления помех 1. Структурные схемы РФ 1. 1. Каноническая схема 1. 1. 2. Нерекурсивная (трансверсальная) структура 1. 1. 3. Рекурсивная структура 1. 2. Каскадная структура 1. 3. Параллельная структура 1. 4. Решетчатая структура 1. 5. Многоканальная структура 2. Адаптивные структуры РФ 3. Ошибки квантования при цифровой реализации РФ. 3. 1. Шумы квантования АЦП 3. 2. Шумы квантования коэффициентов ЦФ 3. 3. Шумы квантования произведений в узлах ЦФ
 несущей частоты сигнала или частоты")
Эффект слепых скоростей и методы его устранения Вобуляция (перестройка) несущей частоты сигнала или частоты повторения импульсов Первый вариант соответствует многочастотному сигналу. Второй – вобуляции периода повторения, который осуществляется технически более просто. В простейшем случае используют 2 периода повторения импульсов. K(f) FП 1 FП 2 2 FП 1 3 FП 1=Fп 2 3 Fп 2 f Неравномерность АЧХ зависит от коэффициента вобуляции kв=Тп 1/Тп 2.

Классификация активных помех По виду спектра Заградительные Прицельные Ответные По воздействию Подавляющие Маскирующие Имитирующие По виду сигнала Импульсные Непрерывные АМ, ЧМ, АЧМ АШМ, ЧШМ Синхр. И несинхр. Шумомодулирован. Прямошумовые Кратные ответные
. По")
Частотные диапазоны АП Генерацию и излучение помех осуществляют специализированные станции активных помех (САП). По принципу формирования несущей частоты помехи САП делятся на САП ретрансляционного типа и САП генераторного типа. САП размещают на защищаемых объектах или вне их. Современные самолётные станции помех имеют мощность ~(10… 103)вт в непрерывном режиме и примерно на порядок выше — в импульсном; максимальное усиление антенны обычно 10— 20 д. Б. Мощности наземных и корабельных станций помех, как правило, выше. В передающей части станций помех применяются широкополосные усилители на лампах бегущей волны и усилители с распределёнными постоянными, генераторы на лампах обратной волны, магнетронах и др. приборах СВЧ, перестраиваемых в широком диапазоне частот. Наиболее эффективны станции помех с фазированными антенными решётками, в которых используются усилители и генераторы на полупроводниковых приборах и миниатюрных лампах бегущей волны. С развитием полупроводниковой электроники и микроминиатюризацией радиоэлектронных элементов пассивные отражатели (для создания пассивных помех) начинают строить с использованием

миниатюрных электронных усилителей и генераторами и они превращаются в активные средства радиопротиводействия — миниатюрные передатчики помех. Для обнаружения необходимо превышение сигналом шума на ~q>5 д. Б, поэтому целью создания помех является снижение этого показателя. Активность РЭС по частотному диапазону АП 0, 1 1, 0 10, 0 100, 0 F, ГГц Обозначение L S C X Ku K Ka ММ Диапазон 2, 0 4, 0 8, 0 12, 5 18, 0 26, 5 40, 0 >40

Дальность действия РЛС в условиях активных помех Типы активных помех: заградительные, прицельные (импульсные или непрерывные; по частоте и направлению), маскирующие, уводящие, мерцательные, имитирующие, ответные (однократные или многократные). По характеру перекрытия частотного диапазона активные помехи разделяют на заградительные и прицельные. Заградительные помехи имеют широкий спектр частот, значительно превышающий полосу пропускания приемника подавляемой РЛС: ΔFпп >> Δ fпр , где Δ Fпп – диапазон спектра частот помехи, Δ fпр – полоса пропускания приемника. Заградительной помехой (ЗП) можно подавить несколько РЛС, работающих на близких частотах. Для создания ЗП достаточно приближенно знать рабочие частоты РЛС, поэтому разведывательная аппаратура ПП является относительно простой. Недостаток: малая эффективность использования энергии передатчика помех, т. к. мощность помехи на входе приемника пропорциональна Δ fпр/ Δ Fпп. Прицельные помехи имеют спектр частот, соизмеримый с полосой пропускания подавляемой РЛС: ΔFпп ≈ Δfпр. Центральная частота спектра прицельной помехи должна соответствовать несущей частоте РЛС. Мощность передатчика прицельных помех используется эффективнее, чем у ЗП. Однако необходимо точнее знать несущую частоту РЛС и требуются высокочастотные генераторы помех с быстрой перестройкой частоты. Поскольку при одинаковой мощности помехи массогабаритные характеристики аппаратуры генерации прицельных помех меньше, чем для заградительных, то такие помехи обычно используются для индивидуального подавления РЭС.

Таким образом: заградительные имеют ΔFп>> Δfпр. Отношение Эп/ ΔFпп определяет спектральную плотность помех. Энергетически выгоднее применение прицельных помех. ΔFпп≈ Δfпр. Отсюда следует, что параметр Эп/ ΔFпп для прицельных помех много меньше, чем для заградительных помех. - плотность потока мощности на вх. антенны РЛС - эффективная площадь раскрыва антенны - мощность АП на вх. приемника Обозначим Кбл - уровень БЛ ДНА РЛС, Кп - коэффициент подавления активной помехи в РЛС,

Структурная схема передатчика прямошумовых помех Структурная схема постановщика прицельных помех

Наиболее сложным узлом постановщика прицельных помех является ГВЧ, поскольку именно его характеристики определяют тактико-технические характеристики ПП. К ГВЧ ПП предъявляются следующие требования: работа в широком диапазоне частот; обеспечение требуемой выходной мощности и слабая зависимость последней от частоты; высокая скорость перестройки по частоте; высокий КПД и малые массогабаритные характеристики. В качестве ГВЧ, в зависимости от рабочего диапазона частот, могут использоваться электронно-вакуумные и полупроводниковые приборы. В дециметровом, сантиметровом и миллиметровом диапазонах длин волн преимущественно применяют клистроны, магнетроны, ЛБВ и ЛОВ. Клистроны и магнетроны имеют высокую выходную мощность и большой КПД. В режиме усиления выходные мощности клистронных генераторов могут достигать 1, 0 МВт в дециметровом, 300. . . 500 к. Вт в сантиметровом и 10. . . 20 к. Вт в миллиметровом диапазонах длин волн. Коэффициенты усиления лежат в пределах 20. . . 55 д. Б, КПД – до 50%. В импульсном режиме работы значения выходной мощности клистронных генераторов могут достигать соответственно 100 МВт, 20. . . 30 МВт и 100 к. Вт. Генераторы на пролетных клистронах узкополосны с относительной шириной рабочего диапазона частот 0, 5. . . 1%. Для расширения рабочей полосы частот обычно используется расстройка входного и промежуточных резонаторов, что расширяет ширину рабочей полосы частот до 5%. Значения напряжений питания в клистронах достигают десятков киловольт, что является их существенным недостатком.

Другим недостатком, как клистронов, так и магнетронов, является то, что они содержат резонансные элементы. Поэтому обеспечение высокой скорости перестройки ГВЧ на их основе вызывает серьезные трудности. Генераторы на ЛОВ и ЛБВ являются безрезонаторными, что позволяет осуществлять электронную перестройку частоты передатчика помех со скоростью до 100 МГц/мкс. Они обеспечивают высокую выходную мощность ГВЧ при хорошей равномерности амплитудно-частотной характеристики. Однако КПД таких усилительных приборов меньше, чем КПД ГВЧ клистронного и магнетронного типов. Основным требованием к ГШ является получение широкого по частотному диапазону и равномерного по уровню мощности спектра. С учетом нестабильности ГВЧ, ширину спектра прицельной помехи считают оптимальной, если Fпп 1, 3 fпр. В постановщиках прицельных помех, как правило, в качестве ГШ используют либо шумовой диод, работающий в режиме насыщения, либо тиратрон, помещенный в магнитное поле. Шумовое напряжение диода имеет широкий и достаточно равномерный спектр шириной в десятки и сотни МГц, однако его интенсивность низкая, что заставляет использовать большее количество каскадов ШПУ. Интенсивность шумового напряжения тиратрона значительно выше, однако ширина его спектра составляет единицы МГц. Поэтому выбор источника шума зависит от ширины полосы пропускания приемника подавляемых РЛС.

Методы защиты РЛС от АП Применение АШП, существенный недостаток - их легко обнаружить, что ставит в уязвимое положение ПАП и позволяет применять следующие меры борьбы с АШП: работу РЛС в короткие промежутки времени; смена несущих частот; применение многочастотных РЛС; , пространственную селекцию сигналов целей от АШП; использование длительного когерентного накопления сигналов; использование сложных сигналов. При использовании сложных сигналов значительно снижается импульсная мощность передатчика РЛС, т. е. отношение Ри /Рш небольшое. Приближение ПАП к РЛС позволяет увеличить зону подавления РЛС, однако при этом ПАП попадает в зону поражения РЛС наведения. Увеличение мощности передатчика РЛС, как и повышение чувствительности (потенциала РЛС) «отодвигает» зону подавления РЛС. Частоту излучения ПАП легко измерить и использовать смену частот РЛС для борьбы с АП. Два типа активных шумовых помех: заградительные, прицельные (импульсные или непрерывные; по частоте и направлению), маскирующие, уводящие, мерцательные, имитирующие, ответные (однократные или многократные). Заградительные имеют ΔFп>> Δfпр. . Отношение Эп/ ΔFп – спектральная плотность помех. Прицельные -ΔFп≈ Δfпр. Отсюда следует, что параметр Эп/ ΔFп много меньше, чем для заградительных помех и следовательно энергетически выгоднее применение прицельных помех.

Кп PАП 1 PАП 2 PАП 3 0 Rcmах3 Rcmах2 Rcmах1 Rc

Схема компенсации помехи с использованием дополнительного канала U 0 Основной канал UB У-во вычитания UДОП Дополнит. канал КДОП Сигнал присутствует в основном канале, а активная помеха и в основном и дополнит. Корреляционная ОС обеспечивает эквивалентность АП в каналах, что важно для ее Компенсации.

При В отсутствие помехи дополнительный канал «не работает» , т. к. k. ДОП=0. При равенстве Фаз можно обеспечить компенсацию на ПЧ (когерентно), в противном случае компенсация осуществляется некогерентно. Для компенсации АП от нескольких источников применяются когерентные компенсаторы с несколькими линейными каналами компенсации.

Активные помехи радиолиниям управления и связи ЛС ОУ или РЛС или УУС ПАП
")
РЛУС используются различные виды модуляции: ШИМ, КИМ, ФИМ, сложные сигналы. Опорная и информационная (рабочая) последовательности. Применяются шумовые, импульсные, ретрансляционные помехи, ЗП, Пр. П. Прицельность помехи по коду. Часто важнее перехват информации, чем ее подавление. Используя понятие порогового отношения сигнал-помеха можно определить Дальность радиосвязи и зону подавления ее активной помехой. Один из вариантов реализации ПАП основан на ретрансляции сигнала подавляемого РЭС.
РТС_1-7_2011+.ppt