

Лекция 18 изм перемещ,размеров,уровня.pptx
- Количество слайдов: 51
 Измерение перемещений, размеров, уровней и деформаций Лекции по дисциплине «Измерения электрических, магнитных и неэлектрических величин» Подготовлены доцентом К. В. Сафроновой 2010 год
Измерение перемещений, размеров, уровней и деформаций Лекции по дисциплине «Измерения электрических, магнитных и неэлектрических величин» Подготовлены доцентом К. В. Сафроновой 2010 год
 Измеряют линейные и угловые перемещения. Диапазоны измерений линейных и угловых перемещений: малые перемещения – до 2 -3 мм и 2 -3˚ большие перемещения – до нескольких м для линейных и 25 -40 оборотов для угловых перемещений
Измеряют линейные и угловые перемещения. Диапазоны измерений линейных и угловых перемещений: малые перемещения – до 2 -3 мм и 2 -3˚ большие перемещения – до нескольких м для линейных и 25 -40 оборотов для угловых перемещений
 Преобразование в перемещение осуществляется также при измерении таких величин, как: сила давление момент силы Большинство преобразователей и приборов для измерения перемещений относятся к аналоговым. Однако имеются и цифровые преобразователи – кодирующие линейки и диски
Преобразование в перемещение осуществляется также при измерении таких величин, как: сила давление момент силы Большинство преобразователей и приборов для измерения перемещений относятся к аналоговым. Однако имеются и цифровые преобразователи – кодирующие линейки и диски
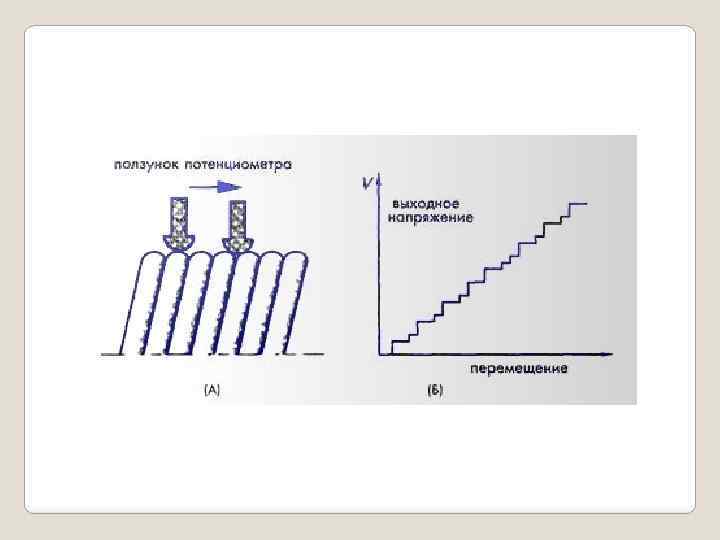
 Эти ИП представляют собой реостат, движок которого перемещается по обмотке") Реостатный преобразователь (потенциометрический датчик) Эти ИП представляют собой реостат, движок которого перемещается по обмотке в соответствии со значением измеряемой неэлектрической величины. Это перемещение может быть угловым α или линейным l. Сопротивление R между движком и одним из концов обмотки может быть распределено линейно или по некоторому другому закону по пути движка. Соответственно реостатные преобразователи разделяются на линейные и функциональные.
Реостатный преобразователь (потенциометрический датчик) Эти ИП представляют собой реостат, движок которого перемещается по обмотке в соответствии со значением измеряемой неэлектрической величины. Это перемещение может быть угловым α или линейным l. Сопротивление R между движком и одним из концов обмотки может быть распределено линейно или по некоторому другому закону по пути движка. Соответственно реостатные преобразователи разделяются на линейные и функциональные.
 У линейных R пропорционально α или l: R = Sα или R = Sl, где S – коэффициент преобразования, а у функциональных R = f(α) или R = f(l), где f(٠) – функция преобразования.
У линейных R пропорционально α или l: R = Sα или R = Sl, где S – коэффициент преобразования, а у функциональных R = f(α) или R = f(l), где f(٠) – функция преобразования.
 На каркас 1 из изоляционного материала намотана проволока 2. Изоляция проволоки на верхней грани каркаса зачищена и по металлу проволоки скользит движок-щётка 3. Вторая щётка 4 скользит по токосъёмному кольцу 5. Обе щётки изолированы от приводного валика 6. Каркас делают из текстолита или пластмассы, а также из алюминия. Формы каркасов разнообразны: плоская или цилиндрическая пластина, кольцо, сегмент и др. Проволока обмотки чаще всего бывает манганиновая или константановая, мало применяют также сплав платины с иридием. Провод должен быть покрыт эмалью, чтобы соседние витки не замкнулись. Щётка выполняется из двух-трёх проволочек из фосфористой бронзы, серебра или сплава платины с иридием. Функциональный реостатный ИП
На каркас 1 из изоляционного материала намотана проволока 2. Изоляция проволоки на верхней грани каркаса зачищена и по металлу проволоки скользит движок-щётка 3. Вторая щётка 4 скользит по токосъёмному кольцу 5. Обе щётки изолированы от приводного валика 6. Каркас делают из текстолита или пластмассы, а также из алюминия. Формы каркасов разнообразны: плоская или цилиндрическая пластина, кольцо, сегмент и др. Проволока обмотки чаще всего бывает манганиновая или константановая, мало применяют также сплав платины с иридием. Провод должен быть покрыт эмалью, чтобы соседние витки не замкнулись. Щётка выполняется из двух-трёх проволочек из фосфористой бронзы, серебра или сплава платины с иридием. Функциональный реостатный ИП
 Реальная статическая характеристика реостатных преобразователей имеет ступенчатый характер Погрешность квантования, уменьшается при увеличении числа витков W преобразователя (при уменьшении диаметра обмотки d).
Реальная статическая характеристика реостатных преобразователей имеет ступенчатый характер Погрешность квантования, уменьшается при увеличении числа витков W преобразователя (при уменьшении диаметра обмотки d).
 Реостатный датчик представляет собой переменное сопротивление, подвижный контакт которого перемещается вместе с перемещением контролируемого объекта. В результате пропорционально измеряемому перемещению изменяется сопротивление между точками а и б R 2 Е R а R 1 U б V |δmax| ≤ 0, 001 =0, 1%, то RV ≥ 250 R.
Реостатный датчик представляет собой переменное сопротивление, подвижный контакт которого перемещается вместе с перемещением контролируемого объекта. В результате пропорционально измеряемому перемещению изменяется сопротивление между точками а и б R 2 Е R а R 1 U б V |δmax| ≤ 0, 001 =0, 1%, то RV ≥ 250 R.
 на") Ранее реостатные датчики выполнялись исключительно намоткой провода с высоким удельным сопротивлением (нихром, константан) на каркас. Однако такое исполнение датчика приводит к наличию на его выходе зоны нечувствительности при перемещении ползунка в пределах диаметра провода. Поэтому последние реостатные датчики выполняются намазными из проводящих паст на подложке. Реостатный датчик может быть выполнен не обязательно с изменением выходного сопротивления по линейному закону, нелинейность обеспечивается созданием соответствующего профиля проводящей дорожки.
Ранее реостатные датчики выполнялись исключительно намоткой провода с высоким удельным сопротивлением (нихром, константан) на каркас. Однако такое исполнение датчика приводит к наличию на его выходе зоны нечувствительности при перемещении ползунка в пределах диаметра провода. Поэтому последние реостатные датчики выполняются намазными из проводящих паст на подложке. Реостатный датчик может быть выполнен не обязательно с изменением выходного сопротивления по линейному закону, нелинейность обеспечивается созданием соответствующего профиля проводящей дорожки.
 Потенциометрические датчики угла поворота
Потенциометрические датчики угла поворота
 2. Температурная погрешность При изменении температуры преобразователя") Погрешности реостатных преобразователей 1. Погрешность дискретности (квантования) 2. Температурная погрешность При изменении температуры преобразователя изменяется его сопротивление. Температурной погрешности определяется, прежде всего, температурным коэффициентом сопротивления материала чувствительного элемента. Обычно ТКС материалов провода реостатного ИП не превышает 0, 1 % на 10 ОС.
Погрешности реостатных преобразователей 1. Погрешность дискретности (квантования) 2. Температурная погрешность При изменении температуры преобразователя изменяется его сопротивление. Температурной погрешности определяется, прежде всего, температурным коэффициентом сопротивления материала чувствительного элемента. Обычно ТКС материалов провода реостатного ИП не превышает 0, 1 % на 10 ОС.
 Достоинства реостатных преобразователей перемещения: • высокая чувствительность; • компактность; • возможность применения на постоянном и переменном токе; • удобство эксплуатации. Недостатки реостатных преобразователей перемещения: • засорение контактной дорожки; • недостаточно высокая надежность из-за наличия скользящих контактов; • пожароопасность.
Достоинства реостатных преобразователей перемещения: • высокая чувствительность; • компактность; • возможность применения на постоянном и переменном токе; • удобство эксплуатации. Недостатки реостатных преобразователей перемещения: • засорение контактной дорожки; • недостаточно высокая надежность из-за наличия скользящих контактов; • пожароопасность.
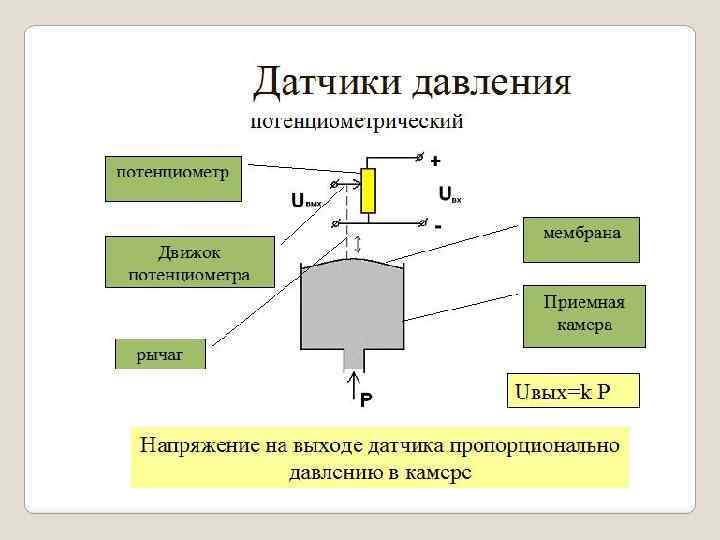
 Применение Реостатные преобразователи перемещения широко используются в датчиках давления, силы, ускорения, расхода, уровня и т. п. , в частности они применяются в уровнемерах для измерения уровня масла или топлива в автомобилях и самолетах.
Применение Реостатные преобразователи перемещения широко используются в датчиках давления, силы, ускорения, расхода, уровня и т. п. , в частности они применяются в уровнемерах для измерения уровня масла или топлива в автомобилях и самолетах.
 Индуктивные преобразователи
Индуктивные преобразователи
 Индуктивный датчик - это преобразователь параметрического типа, принцип действия которого основан на изменении индуктивности L обмотки с сердечником, вследствие изменения магнитного сопротивления RМ магнитной цепи датчика , в которую входит сердечник.
Индуктивный датчик - это преобразователь параметрического типа, принцип действия которого основан на изменении индуктивности L обмотки с сердечником, вследствие изменения магнитного сопротивления RМ магнитной цепи датчика , в которую входит сердечник.
 Индуктивный преобразователь якорь 3 l = lф + 2δ I X 1 катушка 2 магнитопровод неподвижный δ -воздушный зазор . Изменение магнитного сопротивления происходит в результате изменения параметров воздушного зазора под действием входного сигнала .
Индуктивный преобразователь якорь 3 l = lф + 2δ I X 1 катушка 2 магнитопровод неподвижный δ -воздушный зазор . Изменение магнитного сопротивления происходит в результате изменения параметров воздушного зазора под действием входного сигнала .
 Индуктивный преобразователь Индуктивность катушки L = Ψ / I = Φw / I, где Ψ – потокосцепление; Φ – магнитный поток; w – число витков катушки. Магнитный поток в магнитных цепях аналогичен току в электрических цепях. По этой аналогии между магнитными и электрическими цепями вводится понятие магнитного сопротивления Rм с размерностью Гн– 1. Аналогом ЭДС в электрической цепи является произведение Iw – т. н. «намагничивающая сила» или «ампер-витки» – в магнитной цепи: Φ = Iw / Rм,
Индуктивный преобразователь Индуктивность катушки L = Ψ / I = Φw / I, где Ψ – потокосцепление; Φ – магнитный поток; w – число витков катушки. Магнитный поток в магнитных цепях аналогичен току в электрических цепях. По этой аналогии между магнитными и электрическими цепями вводится понятие магнитного сопротивления Rм с размерностью Гн– 1. Аналогом ЭДС в электрической цепи является произведение Iw – т. н. «намагничивающая сила» или «ампер-витки» – в магнитной цепи: Φ = Iw / Rм,
 Индуктивный преобразователь Rм можно представить состоящим из двух последовательно соединённых частей: соответствующих прохождению магнитного потока по ферромагнетику и по воздуху: Rм = Rф + Rв. Из предыдущих уравнений следует, что Пренебрегая краевыми эффектами можно считать, что где μф и μв относительные магнитные проницаемости ферромагнетика и воздуха; μ 0 = 4π× 10– 7 Гн / м –магнитная проницаемость вакуума; S – площадь поперечного сечения магнитопровода.
Индуктивный преобразователь Rм можно представить состоящим из двух последовательно соединённых частей: соответствующих прохождению магнитного потока по ферромагнетику и по воздуху: Rм = Rф + Rв. Из предыдущих уравнений следует, что Пренебрегая краевыми эффектами можно считать, что где μф и μв относительные магнитные проницаемости ферромагнетика и воздуха; μ 0 = 4π× 10– 7 Гн / м –магнитная проницаемость вакуума; S – площадь поперечного сечения магнитопровода.
 нелинейна.") Индуктивный преобразователь Считая μв = 1, получим Как видим, зависимость L(δ) нелинейна.
Индуктивный преобразователь Считая μв = 1, получим Как видим, зависимость L(δ) нелинейна.
 Индуктивный преобразователь Переходя к сопротивлению катушки индуктивности и пренебрегая активным сопротивлением катушки, получим Z( ) = j L = j 0 S w 2/(lф/ ф + 2 ). Учитывая, что 2 >> lф/ ф (так как ф - велико), получим L 0 S w 2/(2 ); Z j 0 Sw 2/(2 ).
Индуктивный преобразователь Переходя к сопротивлению катушки индуктивности и пренебрегая активным сопротивлением катушки, получим Z( ) = j L = j 0 S w 2/(lф/ ф + 2 ). Учитывая, что 2 >> lф/ ф (так как ф - велико), получим L 0 S w 2/(2 ); Z j 0 Sw 2/(2 ).
 Конструкции индуктивных преобразователей при сравнительно больших перемещениях сердечника. Р – измеряемая величина (линейное перемещение, сосредоточенная сила, давление)
Конструкции индуктивных преобразователей при сравнительно больших перемещениях сердечника. Р – измеряемая величина (линейное перемещение, сосредоточенная сила, давление)
 подвижная часть магнитопровода подвешена на пружинах и перемещается под воздействием") В конструкции рис. а) подвижная часть магнитопровода подвешена на пружинах и перемещается под воздействием измеряемой величины Р – сосредоточенной силы, давления, линейного перемещения. В конструкции рис. б при перемещении подвижной части магнитопровода изменяется площадь поперечного сечения воздушного зазора. В конструкции рис. в с разомкнутой магнитной цепью принцип действия основан на изменении индуктивности катушки 1 при большем или меньшем внедрении в неё ферромагнитного сердечника 2 под воздействием измеряемой величины Р. Этот вариант применяется при сравнительно больших перемещениях сердечника.
В конструкции рис. а) подвижная часть магнитопровода подвешена на пружинах и перемещается под воздействием измеряемой величины Р – сосредоточенной силы, давления, линейного перемещения. В конструкции рис. б при перемещении подвижной части магнитопровода изменяется площадь поперечного сечения воздушного зазора. В конструкции рис. в с разомкнутой магнитной цепью принцип действия основан на изменении индуктивности катушки 1 при большем или меньшем внедрении в неё ферромагнитного сердечника 2 под воздействием измеряемой величины Р. Этот вариант применяется при сравнительно больших перемещениях сердечника.
 температурную погрешность, обусловленную") Погрешности индуктивных ИП Среди погрешностей индуктивных ИП можно выделить следующие: 1) температурную погрешность, обусловленную температурным изменением активного сопротивления катушки, магнитной проницаемости материала магнитопровода и якоря и размеров магнитной цепи; 2) погрешность, возникающую из-за действия силы притяжения якоря; 3) погрешность нелинейности функции преобразования; 4) при работе преобразователей в мостовых схемах возникает погрешность из-за нестабильности напряжения и частоты питания моста, а также формы кривой питающего напряжения.
Погрешности индуктивных ИП Среди погрешностей индуктивных ИП можно выделить следующие: 1) температурную погрешность, обусловленную температурным изменением активного сопротивления катушки, магнитной проницаемости материала магнитопровода и якоря и размеров магнитной цепи; 2) погрешность, возникающую из-за действия силы притяжения якоря; 3) погрешность нелинейности функции преобразования; 4) при работе преобразователей в мостовых схемах возникает погрешность из-за нестабильности напряжения и частоты питания моста, а также формы кривой питающего напряжения.
 Конструкции дифференциальных ИП Для улучшения свойств индуктивных ИП используются дифференциальные преобразователи
Конструкции дифференциальных ИП Для улучшения свойств индуктивных ИП используются дифференциальные преобразователи
 В дифференциальном ИП две катушки, каждая из которых создаёт магнитный поток: катушка 1 – поток Ф 1, катушка 2 – поток Ф 2. Потоки направлены так, что, замыкаясь через подвижную часть магнитопровода, подвешенную на пружинах, они в ней вычитаются. При исходном симметричном положении подвижной части и одинаковых токах в катушках Ф 1 – Ф 2 = 0. При перемещении якоря в одну сторону на Δδ индуктивность L 1 катушки 1 , например, уменьшается, а индуктивность L 2 катушки 2 увеличивается, при перемещении якоря в другую сторону – наоборот.
В дифференциальном ИП две катушки, каждая из которых создаёт магнитный поток: катушка 1 – поток Ф 1, катушка 2 – поток Ф 2. Потоки направлены так, что, замыкаясь через подвижную часть магнитопровода, подвешенную на пружинах, они в ней вычитаются. При исходном симметричном положении подвижной части и одинаковых токах в катушках Ф 1 – Ф 2 = 0. При перемещении якоря в одну сторону на Δδ индуктивность L 1 катушки 1 , например, уменьшается, а индуктивность L 2 катушки 2 увеличивается, при перемещении якоря в другую сторону – наоборот.
 Поскольку индуктивный датчик является параметрическим, то для преобразования изменения L в изменение тока используют различные измерительные цепи. Наиболее простыми являются схемы, в которых изменение L проявляется в изменении индуктивного сопротивления ωL, поэтому питание измерительных цепей с индуктивными датчиками обычно осуществляют переменным напряжением.
Поскольку индуктивный датчик является параметрическим, то для преобразования изменения L в изменение тока используют различные измерительные цепи. Наиболее простыми являются схемы, в которых изменение L проявляется в изменении индуктивного сопротивления ωL, поэтому питание измерительных цепей с индуктивными датчиками обычно осуществляют переменным напряжением.
 Зависимости модулей комплексных сопротивлений Z 1 и Z 2 катушек 1 и 2 дифференциального индуктивного преобразователя и разности этих сопротивлений (Z 1 – Z 2) от воздушных зазоров между подвижной и неподвижными частями магнитопровода. δ 0 – воздушные зазоры при симметричном положении подвижной части; Δδ – отклонения в ту и другую стороны от этого положения; Δδ = (0, 3 ÷ 0, 4) δ 0 – рабочая область значений Δδ.
Зависимости модулей комплексных сопротивлений Z 1 и Z 2 катушек 1 и 2 дифференциального индуктивного преобразователя и разности этих сопротивлений (Z 1 – Z 2) от воздушных зазоров между подвижной и неподвижными частями магнитопровода. δ 0 – воздушные зазоры при симметричном положении подвижной части; Δδ – отклонения в ту и другую стороны от этого положения; Δδ = (0, 3 ÷ 0, 4) δ 0 – рабочая область значений Δδ.
 Дифференциальная конструкция обеспечивает ряд существенных преимуществ: 1. Позволяет сделать тонкой, а следовательно и лёгкой подвижную часть магнитопровода. Поперечное сечение магнитопровода делают таким, чтобы не было насыщения ферромагнетика, а разность (Ф 1 – Ф 2) при малых Δδ существенно меньше Ф 1 и Ф 2. 2. В дифференциальной конструкции сила притяжения к верхней и нижней неподвижным частям магнитопровода компенсируются. 3. Катушки 1 и 2 обычно включают в мостовые измерительные цепи , реагирующие на разность их сопротивлений Z 1 и Z 2. Зависимость этой разности от Δδ более линейна, чем Z 1(δ) и Z 2(δ). 4. В мостовых измерительных цепях с дифференциальными индуктивными преобразователями компенсируется влияние температуры и других внешних факторов на Z 1 и Z 2.
Дифференциальная конструкция обеспечивает ряд существенных преимуществ: 1. Позволяет сделать тонкой, а следовательно и лёгкой подвижную часть магнитопровода. Поперечное сечение магнитопровода делают таким, чтобы не было насыщения ферромагнетика, а разность (Ф 1 – Ф 2) при малых Δδ существенно меньше Ф 1 и Ф 2. 2. В дифференциальной конструкции сила притяжения к верхней и нижней неподвижным частям магнитопровода компенсируются. 3. Катушки 1 и 2 обычно включают в мостовые измерительные цепи , реагирующие на разность их сопротивлений Z 1 и Z 2. Зависимость этой разности от Δδ более линейна, чем Z 1(δ) и Z 2(δ). 4. В мостовых измерительных цепях с дифференциальными индуктивными преобразователями компенсируется влияние температуры и других внешних факторов на Z 1 и Z 2.
 Мост с дифференциальным индуктивным преобразователем + Z ΔZ Z – ΔZ U R R ~ Uп Z = R + jωL – комплексное сопротивление катушки (каждой из двух); R – её активное сопротивление; ω = 2πf – круговая частота и f – частота напряжений и . Реактивное сопротивление катушки jωL зависит от частоты, и уже при нескольких килогерцах для конструкций с замкнутым магнитопроводом ωL >> R, так что можно считать, что ΔZ / Z ≈ ΔL / L, а значит
Мост с дифференциальным индуктивным преобразователем + Z ΔZ Z – ΔZ U R R ~ Uп Z = R + jωL – комплексное сопротивление катушки (каждой из двух); R – её активное сопротивление; ω = 2πf – круговая частота и f – частота напряжений и . Реактивное сопротивление катушки jωL зависит от частоты, и уже при нескольких килогерцах для конструкций с замкнутым магнитопроводом ωL >> R, так что можно считать, что ΔZ / Z ≈ ΔL / L, а значит
 Дифференциальные преобразователи позволяют существенно уменьшить погрешности, повысить чувствительность и увеличить линейный участок характеристики. На практике индуктивные измерительные преобразователи всегда выполняются дифференциальными.
Дифференциальные преобразователи позволяют существенно уменьшить погрешности, повысить чувствительность и увеличить линейный участок характеристики. На практике индуктивные измерительные преобразователи всегда выполняются дифференциальными.
 Пример измерения давления жидкости, пара, газа P δ Давление Р жидкости, пара или газа прогибает перегородку магнитопровода и, следовательно, индуктивность катушки изменяется.
Пример измерения давления жидкости, пара, газа P δ Давление Р жидкости, пара или газа прогибает перегородку магнитопровода и, следовательно, индуктивность катушки изменяется.
 Измерение расхода Q жидкости, пара или газа Сужающее устройство Q Р 1 Р 2 Δδ в трубопроводе создаёт перепад давления: Р 1 > Р 2. Разность давлений связана с объёмным (м 3 / час) или массовым (кг / час) расходом соотношением P 1 – P 2 = k Q 2. С помощью мембраны разность (P 1 – P 2) преобразуется в малое перемещение штока Δδ, воспринимаемое индуктивным преобразователем. Если далее применена измерительная цепь с неравновесным мостом , то получается такая цепочка преобразований: Q → (P 1 – P 2) → Δδ → (L 1 – L 2) → U → Iср.
Измерение расхода Q жидкости, пара или газа Сужающее устройство Q Р 1 Р 2 Δδ в трубопроводе создаёт перепад давления: Р 1 > Р 2. Разность давлений связана с объёмным (м 3 / час) или массовым (кг / час) расходом соотношением P 1 – P 2 = k Q 2. С помощью мембраны разность (P 1 – P 2) преобразуется в малое перемещение штока Δδ, воспринимаемое индуктивным преобразователем. Если далее применена измерительная цепь с неравновесным мостом , то получается такая цепочка преобразований: Q → (P 1 – P 2) → Δδ → (L 1 – L 2) → U → Iср.
 Прибор для контроля линейных размеров деталей Якорь Показания миллиамперметра определяются положением якоря индуктивного преобразователя. Прибор предназначен для контроля линейных размеров деталей в процессе обработки. Предел измерений 0, 020, 12 мм. Статическая характеристика в диапазоне измерений линейна. Чувствительность – 5 мка/мкм
Прибор для контроля линейных размеров деталей Якорь Показания миллиамперметра определяются положением якоря индуктивного преобразователя. Прибор предназначен для контроля линейных размеров деталей в процессе обработки. Предел измерений 0, 020, 12 мм. Статическая характеристика в диапазоне измерений линейна. Чувствительность – 5 мка/мкм
 Достоинство индуктивных датчиков - простота и прочность конструкции, отсутствие скользящих контактов; - возможность подключения к источникам промышленной частоты; - относительно большая выходная мощность (до десятков Ватт); - значительная чувствительность. Недостатки: -узкий диапазон измерений; -зависимость индуктивного сопротивления от частоты питающего напряжения, - значительное обратное воздействие датчика на измеряемую величину (за счет притяжения якоря к сердечнику).
Достоинство индуктивных датчиков - простота и прочность конструкции, отсутствие скользящих контактов; - возможность подключения к источникам промышленной частоты; - относительно большая выходная мощность (до десятков Ватт); - значительная чувствительность. Недостатки: -узкий диапазон измерений; -зависимость индуктивного сопротивления от частоты питающего напряжения, - значительное обратное воздействие датчика на измеряемую величину (за счет притяжения якоря к сердечнику).
 Области применения индуктивных датчиков чрезвычайно разнообразны, можно выделить лишь отдельные сферы: промышленная техника измерения и регулирования, робототехника, автомобилестроение, бытовая техника, медицинская техника.
Области применения индуктивных датчиков чрезвычайно разнообразны, можно выделить лишь отдельные сферы: промышленная техника измерения и регулирования, робототехника, автомобилестроение, бытовая техника, медицинская техника.
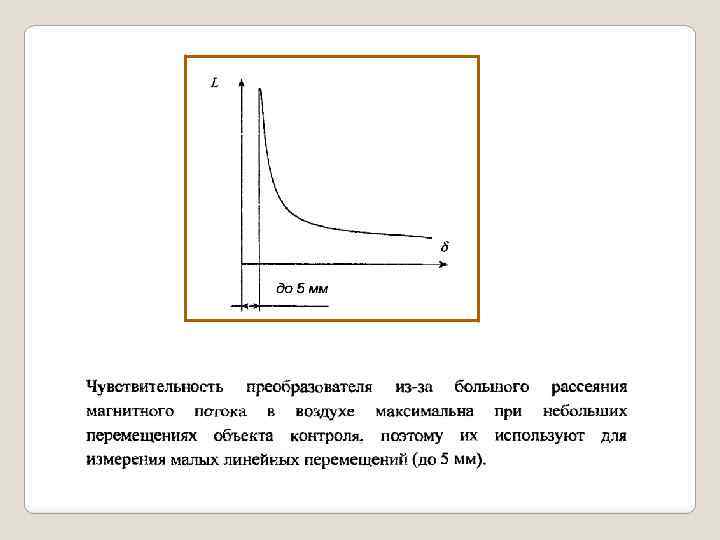
 Существуют индуктивные микрометры, толщиномеры для измерения толщины гальванических покрытий в диапазоне 2 -60 мкм, уровнемеры виброметры акселерометры и др. приборы
Существуют индуктивные микрометры, толщиномеры для измерения толщины гальванических покрытий в диапазоне 2 -60 мкм, уровнемеры виброметры акселерометры и др. приборы
 Трансформаторные преобразователи
Трансформаторные преобразователи
 ИП основан на изменении взаимной индуктивности между") Трансформаторные ИП Принцип действия трансформаторных (взаимоиндуктивных) ИП основан на изменении взаимной индуктивности между двумя обмотками под действием входного сигнала. Одна из обмоток является намагничивающей, а с другой снимается напряжение. Такие измерительные преобразователи допускают измерение перемещений до нескольких десятков сантиметров. Включение их может производиться как по мостовой, так и по дифференциальной схемам
Трансформаторные ИП Принцип действия трансформаторных (взаимоиндуктивных) ИП основан на изменении взаимной индуктивности между двумя обмотками под действием входного сигнала. Одна из обмоток является намагничивающей, а с другой снимается напряжение. Такие измерительные преобразователи допускают измерение перемещений до нескольких десятков сантиметров. Включение их может производиться как по мостовой, так и по дифференциальной схемам
 Трансформаторные ИП Обмотка возбуждения Вторичная обмотка Трансформаторные ИП с изменяющимся воздушным зазором состоят из магнитопровода 1, на который намотаны две обмотки: 2 (обмотка возбуждения) и 3 (вторичная обмотка), и подвижного якоря 4 из ферромагнитного материала. При якорь перемещении подвижного якоря изменяется магнитное сопротивление Магнито. RМ и взаимная провод индуктивность М между обмотками.
Трансформаторные ИП Обмотка возбуждения Вторичная обмотка Трансформаторные ИП с изменяющимся воздушным зазором состоят из магнитопровода 1, на который намотаны две обмотки: 2 (обмотка возбуждения) и 3 (вторичная обмотка), и подвижного якоря 4 из ферромагнитного материала. При якорь перемещении подвижного якоря изменяется магнитное сопротивление Магнито. RМ и взаимная провод индуктивность М между обмотками.
 ЭДС, индуцированная во вторичной обмотке , будет определяться как Е 2 = jωМI 1 Е 2 = j w 1 w 2 I 1/ RМ, (1) где I 1 - ток в первичной обмотке w 1 и w 2 - число витков обмотки возбуждения и вторичной обмотки; - частота.
ЭДС, индуцированная во вторичной обмотке , будет определяться как Е 2 = jωМI 1 Е 2 = j w 1 w 2 I 1/ RМ, (1) где I 1 - ток в первичной обмотке w 1 и w 2 - число витков обмотки возбуждения и вторичной обмотки; - частота.
 выражение для магнитного сопротивления , получим уравнение преобразования ТП с переменным") Подставив в (1) выражение для магнитного сопротивления , получим уравнение преобразования ТП с переменным воздушным зазором Е 2 = j 0 S w 1 w 2 I 1/ (2 + lф/ ф) Е 2 j 0 S w 1 w 2 I 1/ 2.
Подставив в (1) выражение для магнитного сопротивления , получим уравнение преобразования ТП с переменным воздушным зазором Е 2 = j 0 S w 1 w 2 I 1/ (2 + lф/ ф) Е 2 j 0 S w 1 w 2 I 1/ 2.
 Погрешности трансформаторных ИП обусловлены теми же причинами, что и в индуктивных ИП. Кроме этих погрешностей трансформаторные преобразователи имеют погрешности: 1) обусловленные протеканием тока во вторичной обмотке и изменением ее сопротивления; 2) изменением тока в первичной цепи при перемещении якоря.
Погрешности трансформаторных ИП обусловлены теми же причинами, что и в индуктивных ИП. Кроме этих погрешностей трансформаторные преобразователи имеют погрешности: 1) обусловленные протеканием тока во вторичной обмотке и изменением ее сопротивления; 2) изменением тока в первичной цепи при перемещении якоря.
 Для уменьшения погрешности, вызванной изменением тока в первичной цепи, необходимо включить в цепь высокоомный добавочный резистор. Уменьшение погрешности из-за тока во вторичной цепи достигается использованием измерительного прибора или вторичного преобразователя с большим входным сопротивлением. Регулировка чувствительности производится за счет тока возбуждения и добавочного сопротивления. Чувствительность отдельных преобразователей достигает 100 В/см.
Для уменьшения погрешности, вызванной изменением тока в первичной цепи, необходимо включить в цепь высокоомный добавочный резистор. Уменьшение погрешности из-за тока во вторичной цепи достигается использованием измерительного прибора или вторичного преобразователя с большим входным сопротивлением. Регулировка чувствительности производится за счет тока возбуждения и добавочного сопротивления. Чувствительность отдельных преобразователей достигает 100 В/см.
 Достоинства трансформаторных ИП Достоинства отсутствие гальванической связи между цепями питания и выхода; возможность их использования без измерительных схем высокая надежность, вследствие отсутствия подвижных обмоток и контактов, высокая чувствительность, высокая точность, высокая перегрузочная способность. К недостаткам относятся: влияние перемещения подвижного якоря на ток в первичной цепи. ограничение повторяемости характеристик от образца к образцу, вследствие трудности одинакового выполнения распределенных обмоток в ряде преобразователей, высокая стоимость.
Достоинства трансформаторных ИП Достоинства отсутствие гальванической связи между цепями питания и выхода; возможность их использования без измерительных схем высокая надежность, вследствие отсутствия подвижных обмоток и контактов, высокая чувствительность, высокая точность, высокая перегрузочная способность. К недостаткам относятся: влияние перемещения подвижного якоря на ток в первичной цепи. ограничение повторяемости характеристик от образца к образцу, вследствие трудности одинакового выполнения распределенных обмоток в ряде преобразователей, высокая стоимость.
 Дифференциальные трансформаторные ИП Первичные обмотки включены между собой последовательно, а вторичные включены встречно. Последовательное соединение первичных обмоток позволяет существенно уменьшить погрешность, обусловленную изменением тока в первичной цепи. При таком включении сопротивление одной первичной обмотки возрастает, а второй уменьшается примерно на ту же величину, и в целом сопротивление остается неизменным, т. е. ток в первичной цепи остается постоянным. При 2 O 2 функция преобразования дифференциальных ИП практически линейна
Дифференциальные трансформаторные ИП Первичные обмотки включены между собой последовательно, а вторичные включены встречно. Последовательное соединение первичных обмоток позволяет существенно уменьшить погрешность, обусловленную изменением тока в первичной цепи. При таком включении сопротивление одной первичной обмотки возрастает, а второй уменьшается примерно на ту же величину, и в целом сопротивление остается неизменным, т. е. ток в первичной цепи остается постоянным. При 2 O 2 функция преобразования дифференциальных ИП практически линейна
 Свойства дифференциальных трансформаторных ИП аналогичны свойствам дифференциальных индуктивных ИП.
Свойства дифференциальных трансформаторных ИП аналогичны свойствам дифференциальных индуктивных ИП.
 Прибор для измерения толщины стального листа Образцовый стальной лист Полюса одного трансформаторного преобразователя прижимают к стальному листу , толщина δ которого измеряется, полюса другого – к образцовому, имеющему номинальную толщину δ 0. При таком включении измеряется отклонение толщины листа от номинального размера
Прибор для измерения толщины стального листа Образцовый стальной лист Полюса одного трансформаторного преобразователя прижимают к стальному листу , толщина δ которого измеряется, полюса другого – к образцовому, имеющему номинальную толщину δ 0. При таком включении измеряется отклонение толщины листа от номинального размера
 Основным достоинством трансформаторных преобразователей является отсутствие гальванической связи между цепями питания и выхода, а также возможность получения выходного сигнала большей величины, чем питающее напряжение
Основным достоинством трансформаторных преобразователей является отсутствие гальванической связи между цепями питания и выхода, а также возможность получения выходного сигнала большей величины, чем питающее напряжение