

история развития автоматических регуляторов.ppt
- Количество слайдов: 23
 История развития автоматических регуляторов
История развития автоматических регуляторов
 Древнегреческое слово «автоматика» обозначает «самодействие» . Такие самодействующие машины в виде ловушек и капканов широко использовались, на охоте. Более сложный механизм приводил в движение двери храма. Двери 1 раздвигаются двумя воротами 2, поворот которых осуществляется грузом 3 и бадьей с водой 4. Наполнение бадьи начинается при разжигании священного огня 5, металлическая чаша которого через стержень нагревает воду в баке 6. При этом образуется пар, вытесняющий воду из бака 6 в бадью 4. После того как огонь гаснет, вода из бадьи всасывается обратно в бак и двери закрываются устройство автомата для продажи святой воды.
Древнегреческое слово «автоматика» обозначает «самодействие» . Такие самодействующие машины в виде ловушек и капканов широко использовались, на охоте. Более сложный механизм приводил в движение двери храма. Двери 1 раздвигаются двумя воротами 2, поворот которых осуществляется грузом 3 и бадьей с водой 4. Наполнение бадьи начинается при разжигании священного огня 5, металлическая чаша которого через стержень нагревает воду в баке 6. При этом образуется пар, вытесняющий воду из бака 6 в бадью 4. После того как огонь гаснет, вода из бадьи всасывается обратно в бак и двери закрываются устройство автомата для продажи святой воды.
 Утка не только крякала, но и ходила, переваливаясь с боку") Автомат Вокансона (1709— 1782) Утка не только крякала, но и ходила, переваливаясь с боку на бок, плавала и плескалась в воде, двигала головой, расправляла крылья и приводила в порядок перья с помощью своего клюва. Утка также пила воду, поднимая голову, чтобы показать шею во время глотков, клевала зерна, "переваривая" их с помощью химических веществ, и выделяла экскременты
Автомат Вокансона (1709— 1782) Утка не только крякала, но и ходила, переваливаясь с боку на бок, плавала и плескалась в воде, двигала головой, расправляла крылья и приводила в порядок перья с помощью своего клюва. Утка также пила воду, поднимая голову, чтобы показать шею во время глотков, клевала зерна, "переваривая" их с помощью химических веществ, и выделяла экскременты
 В ветряке английского кузнеца Эдмунда Ли, первый патент на который был получен в 1745 г. , для разворота крыши использовано дополнительное ветровое колесо 1— основное рабочее ветряное колесо мельницы; 2 — дополнительное ветряное колесо, ось вращения которого перпендикулярна оси рабочего колеса; 3 — неподвижная азимутальная шестерня, установленная на башне; 4 — червячный редуктор привода. Оба ветряных колеса установлены на вращающейся крыше. Когда направление ветра не совпадает с осью вращения рабочего колеса 1, дополнительное ветряное колесо 2 через редуктор 4 поворачивает всю крышу до такого положения, когда плоскость дополнительного колеса будет совпадать с направлением ветра, и поворот крыши прекратится.
В ветряке английского кузнеца Эдмунда Ли, первый патент на который был получен в 1745 г. , для разворота крыши использовано дополнительное ветровое колесо 1— основное рабочее ветряное колесо мельницы; 2 — дополнительное ветряное колесо, ось вращения которого перпендикулярна оси рабочего колеса; 3 — неподвижная азимутальная шестерня, установленная на башне; 4 — червячный редуктор привода. Оба ветряных колеса установлены на вращающейся крыше. Когда направление ветра не совпадает с осью вращения рабочего колеса 1, дополнительное ветряное колесо 2 через редуктор 4 поворачивает всю крышу до такого положения, когда плоскость дополнительного колеса будет совпадать с направлением ветра, и поворот крыши прекратится.
") Регулятор питания котла паровой машины И. И. Ползунова (1765)
Регулятор питания котла паровой машины И. И. Ползунова (1765)
.") Регулятор частоты вращения паровой машины Дж. Уатта (1784).
Регулятор частоты вращения паровой машины Дж. Уатта (1784).
 «О регуляторах» , ставший одной") В 1868 г. появился труд Джеймса Максвелла (1831– 1879) «О регуляторах» , ставший одной из основ современной теории автоматических систем управления.
В 1868 г. появился труд Джеймса Максвелла (1831– 1879) «О регуляторах» , ставший одной из основ современной теории автоматических систем управления.
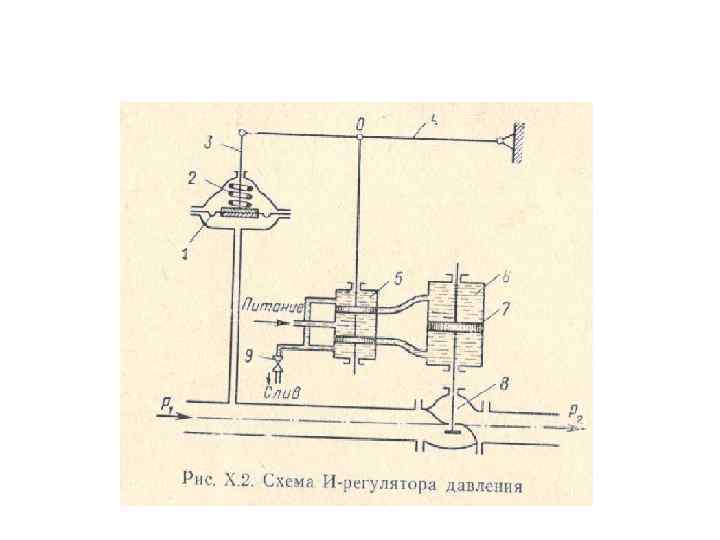
впервые осуществил непрямое автоматическое регулирование, введя в цепь") В 1873 Ж. Фарко (1825— 1893)впервые осуществил непрямое автоматическое регулирование, введя в цепь регулирования усилитель - гидравлический сервомотор Регулятор непрямого действия без обратной связи
В 1873 Ж. Фарко (1825— 1893)впервые осуществил непрямое автоматическое регулирование, введя в цепь регулирования усилитель - гидравлический сервомотор Регулятор непрямого действия без обратной связи
 Передаточные функции
Передаточные функции
 Регулятор непрямого действия с жесткой отрицательной обратной связью
Регулятор непрямого действия с жесткой отрицательной обратной связью
 • П-регулятор
• П-регулятор
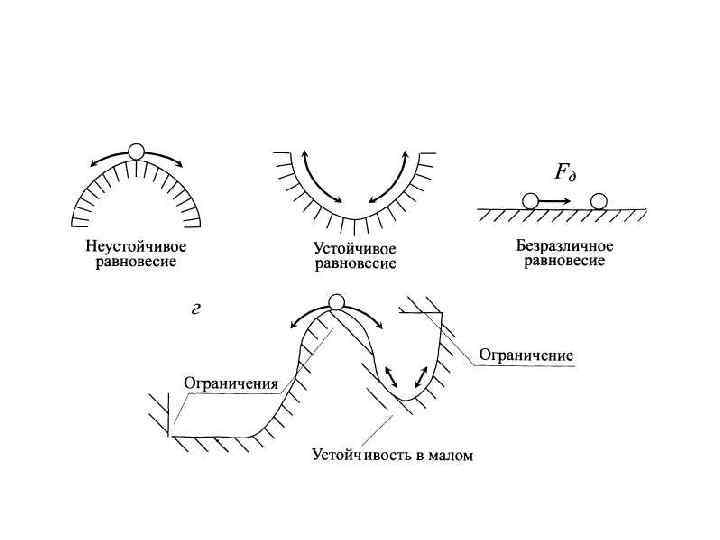
 Техническую теорию автоматического регулирования создал в 1878 году российский математик И. А. Вышнеградский (1831– 1895). Для системы третьего порядка дополненная диаграмма Вышнеградского имеет вид где Условия устойчивости следующие: A > 0, B > 0 и A*B > 1, Область ЕСF апериодический Область ECD монотонный Область FDB колебательный Иная область - расходящийся
Техническую теорию автоматического регулирования создал в 1878 году российский математик И. А. Вышнеградский (1831– 1895). Для системы третьего порядка дополненная диаграмма Вышнеградского имеет вид где Условия устойчивости следующие: A > 0, B > 0 и A*B > 1, Область ЕСF апериодический Область ECD монотонный Область FDB колебательный Иная область - расходящийся
 В 1884 г появился регулятор непрямого действия с дополнительной обратной связью, получившей название изодромной.
В 1884 г появился регулятор непрямого действия с дополнительной обратной связью, получившей название изодромной.
 Новый этап в развитии автоматического регулирования наступил с применением в регуляторах электронных элементов, в частности вычислительных устройств, что существенно расширило возможность усовершенствования алгоритмов регулирования введением воздействий по высшим производным, интегралам и более сложным функциям. Преимущества электронных регуляторов особенно проявились в самонастраивающихся системах, первыми из которых были экстремальные регуляторы: регулятор топки парового котла по минимуму потерь в дымовой трубе (1926), электрический регулятор КПД (1940), авиационные регуляторы (1944). В последнем случае регулируемым объектом является двигатель, регулируемой величиной может быть его коэффициент полезного действия или расход горючего. Устройство автоматического поиска долото найти скорость, при которой двигатель будет иметь максимальный коэффициент полезного действия или минимальный расход горючего.
Новый этап в развитии автоматического регулирования наступил с применением в регуляторах электронных элементов, в частности вычислительных устройств, что существенно расширило возможность усовершенствования алгоритмов регулирования введением воздействий по высшим производным, интегралам и более сложным функциям. Преимущества электронных регуляторов особенно проявились в самонастраивающихся системах, первыми из которых были экстремальные регуляторы: регулятор топки парового котла по минимуму потерь в дымовой трубе (1926), электрический регулятор КПД (1940), авиационные регуляторы (1944). В последнем случае регулируемым объектом является двигатель, регулируемой величиной может быть его коэффициент полезного действия или расход горючего. Устройство автоматического поиска долото найти скорость, при которой двигатель будет иметь максимальный коэффициент полезного действия или минимальный расход горючего.
 Градиентные методы Их используют в редких случаях, а именно, когда известна функция, описывающая график зависимости выхода требуемого продукта от всех переменных оказывающих влияние на протекание процесса.
Градиентные методы Их используют в редких случаях, а именно, когда известна функция, описывающая график зависимости выхода требуемого продукта от всех переменных оказывающих влияние на протекание процесса.
 Сетчатая оптимизация Принцип заключается в изменении одной из переменных с заданным шагом, при отслеживании изменения качества регулирования. Когда установлено оптимальное значение одной из переменных начинается изменение второй. Минус метода в том, что вторая переменная принимает оптимальное значение относительно оптимального значения первой, а трития относительно оптимального значения второй при заданной первой. Это приводит к отклонению от абсолютного экстремума.
Сетчатая оптимизация Принцип заключается в изменении одной из переменных с заданным шагом, при отслеживании изменения качества регулирования. Когда установлено оптимальное значение одной из переменных начинается изменение второй. Минус метода в том, что вторая переменная принимает оптимальное значение относительно оптимального значения первой, а трития относительно оптимального значения второй при заданной первой. Это приводит к отклонению от абсолютного экстремума.
 Симплекс метод Выделяем, скажем, три точки и оцениваем их близости к экстремуму. В классическом случае проводится прямая, берущая свое начало в наихудшей точке и проходящая через середину противолежащей стороны. Математическим анализом находится новая оптимальная точка на этой прямой и относительно ее достраивается треугольник. Затем методика повторяется, пока экстремум не будет определен с заданной точностью.
Симплекс метод Выделяем, скажем, три точки и оцениваем их близости к экстремуму. В классическом случае проводится прямая, берущая свое начало в наихудшей точке и проходящая через середину противолежащей стороны. Математическим анализом находится новая оптимальная точка на этой прямой и относительно ее достраивается треугольник. Затем методика повторяется, пока экстремум не будет определен с заданной точностью.
 Группа методов Монте-Карла Суть заключается в выборе случайной точки входа и изменении этой точки со случайным шагом в случайном направлении! В случае отдаления от экстремума происходит возврат к предыдущему значению и изменяется другая переменная.
Группа методов Монте-Карла Суть заключается в выборе случайной точки входа и изменении этой точки со случайным шагом в случайном направлении! В случае отдаления от экстремума происходит возврат к предыдущему значению и изменяется другая переменная.
 Одноконтурная схема автоматизации управления давлением в трубопроводе с постоянными настройками регулятора
Одноконтурная схема автоматизации управления давлением в трубопроводе с постоянными настройками регулятора
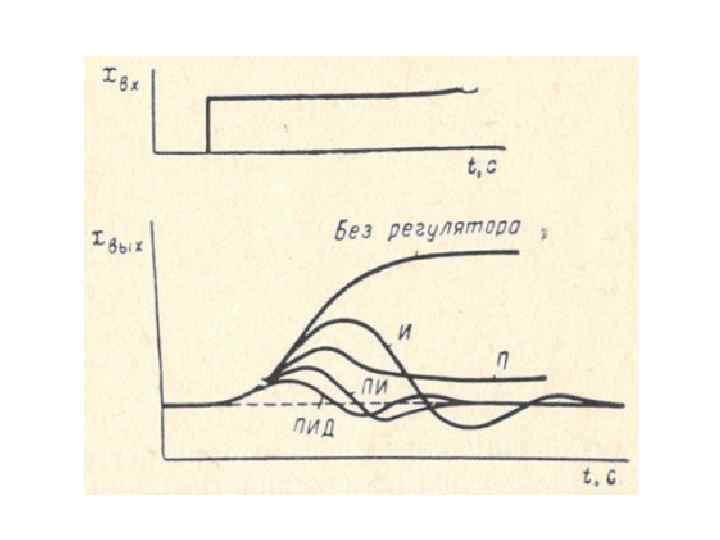
 Современные ПИД регуляторы самонастраиваемые. Методы их настройки основаны на отыскании трех экстремумов при трех переменных. Эти экстремумы – минимальное квадратичное отклонение переходного процесса, минимальное его время и минимальная величина перерегулирования.
Современные ПИД регуляторы самонастраиваемые. Методы их настройки основаны на отыскании трех экстремумов при трех переменных. Эти экстремумы – минимальное квадратичное отклонение переходного процесса, минимальное его время и минимальная величина перерегулирования.