

для студ презентация инф устр в мехатронике.pptx
- Количество слайдов: 96
 ИНФОРМАЦИОННЫЕ УСТРОЙСТВА И СИСТЕМЫ В МЕХАТРОНИКЕ
ИНФОРМАЦИОННЫЕ УСТРОЙСТВА И СИСТЕМЫ В МЕХАТРОНИКЕ
 ЛИТЕРАТУРА • Маругин А. П. Элементы систем автоматики : Конспект лекций. – Екатеринбург: Изд во УГГУ, 2006. – 219 с. • Воротников С. А. Информационные устройства робототехнических систем: Учеб. пособие. – М. : Изд во МГТУ им. Н. Э. Баумана, 2005. – 384 с. • Системы очувствления и адаптивные промышленные роботы / В. Б. Брагин, Ю. Г. Войлов, Ю. Д. Жаботинский и др. ; Под общ. Ред. Е. П. Попова, В. В. Клюева. – М. : Машиностроение, 1985. – 256 с. • Терехов В. М. Элементы автоматизированного электропривода : Учебник для вузов. – М. : Энергоатомиздат, 1987. 224 с. • Арменский Е. В. , Фалк Г. Б. Электромеханические устройства автоматики. Учебное пособие – Московский государственный институт электроники и математики (МИЭМ) : М. , 2002, 214 с. • Шохин В. В. Элементы систем автоматики: конспект лекций. Магнитогорск: Изд во Магнитогорского гос. ун та, 2012. – 133 с.
ЛИТЕРАТУРА • Маругин А. П. Элементы систем автоматики : Конспект лекций. – Екатеринбург: Изд во УГГУ, 2006. – 219 с. • Воротников С. А. Информационные устройства робототехнических систем: Учеб. пособие. – М. : Изд во МГТУ им. Н. Э. Баумана, 2005. – 384 с. • Системы очувствления и адаптивные промышленные роботы / В. Б. Брагин, Ю. Г. Войлов, Ю. Д. Жаботинский и др. ; Под общ. Ред. Е. П. Попова, В. В. Клюева. – М. : Машиностроение, 1985. – 256 с. • Терехов В. М. Элементы автоматизированного электропривода : Учебник для вузов. – М. : Энергоатомиздат, 1987. 224 с. • Арменский Е. В. , Фалк Г. Б. Электромеханические устройства автоматики. Учебное пособие – Московский государственный институт электроники и математики (МИЭМ) : М. , 2002, 214 с. • Шохин В. В. Элементы систем автоматики: конспект лекций. Магнитогорск: Изд во Магнитогорского гос. ун та, 2012. – 133 с.
 Функциональная схема и условное обозначение операционного усилителя
Функциональная схема и условное обозначение операционного усилителя
 Расчетная схема ОУ
Расчетная схема ОУ
 Основные соотношения для ОУ Приняты допущения Для инвертирующего входа ОУ На основании этих уравнений можно получить
Основные соотношения для ОУ Приняты допущения Для инвертирующего входа ОУ На основании этих уравнений можно получить
 Для прямого входа На основании представленных уравнений можно получить
Для прямого входа На основании представленных уравнений можно получить
 входу") Передаточные функции ОУ По инвертирующему входу По неинвертирующему (прямому) входу
Передаточные функции ОУ По инвертирующему входу По неинвертирующему (прямому) входу
 П-регулятор
П-регулятор
 И -регулятор
И -регулятор
 ПИ -регулятор
ПИ -регулятор
 ПИ регулятор
ПИ регулятор
 Вторая схема ПИ регулятора
Вторая схема ПИ регулятора
 ПД -регулятор
ПД -регулятор
 Вторая схема ПД регулятора
Вторая схема ПД регулятора
 Характеристики для второй схемы ПД регулятора
Характеристики для второй схемы ПД регулятора
 ПИД -регулятор
ПИД -регулятор
 Характеристики ПИД регулятора
Характеристики ПИД регулятора
") Апериодическое звено (А-регулятор, фильтр)
Апериодическое звено (А-регулятор, фильтр)
 Характеристики А регулятора
Характеристики А регулятора
 Ограничитель напряжения с использованием стабилитронов
Ограничитель напряжения с использованием стабилитронов
 Транзисторная схема ограничения напряжения
Транзисторная схема ограничения напряжения
 Ограничитель напряжения с использованием двух ОУ
Ограничитель напряжения с использованием двух ОУ
 Компараторы
Компараторы
 Прецизионный выпрямитель
Прецизионный выпрямитель
 Прецизионный выпрямитель При положительной полуволне напряжения При отрицательной полуволне напряжения
Прецизионный выпрямитель При положительной полуволне напряжения При отрицательной полуволне напряжения
 Фазочувствительный выпрямитель
Фазочувствительный выпрямитель
 Точный аналоговый ключ
Точный аналоговый ключ
") Задатчик интенсивности (интегро-задающее устройство)
Задатчик интенсивности (интегро-задающее устройство)
 Диаграммы напряжений для ЗИ
Диаграммы напряжений для ЗИ
") Цифроаналоговый преобразователь (ЦАП)
Цифроаналоговый преобразователь (ЦАП)
 Номер строки Цифровой код Аналоговый выход, В D 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Вес разряда C B A 0 0 0 0 0 1 1 1 1 8 0 0 0 0 1 1 1 1 4 0 0 1 1 2 0 1 0 1 1 0 0, 2 0, 4 0, 6 0, 8 1, 0 1, 2 1, 4 1, 6 1, 8 2, 0 2, 2 2, 4 2, 6 2, 8 3, 0
Номер строки Цифровой код Аналоговый выход, В D 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Вес разряда C B A 0 0 0 0 0 1 1 1 1 8 0 0 0 0 1 1 1 1 4 0 0 1 1 2 0 1 0 1 1 0 0, 2 0, 4 0, 6 0, 8 1, 0 1, 2 1, 4 1, 6 1, 8 2, 0 2, 2 2, 4 2, 6 2, 8 3, 0
 Электрическая схема ЦАП
Электрическая схема ЦАП
 Первая строка: A, B, C и D – замкнуты на общую точку, следовательно. . Вторая строка: B, C и D – замкнуты на общую точку, а А – подключен к источнику опорного напряжения, тогда . Седьмая строка:
Первая строка: A, B, C и D – замкнуты на общую точку, следовательно. . Вторая строка: B, C и D – замкнуты на общую точку, а А – подключен к источнику опорного напряжения, тогда . Седьмая строка:
 ЦАП с матрицей R-2 R
ЦАП с матрицей R-2 R
") Аналого-цифровой преобразователь (АЦП)
Аналого-цифровой преобразователь (АЦП)
") АЦП с динамической компенсацией (АЦП последовательного счета)
АЦП с динамической компенсацией (АЦП последовательного счета)
 АЦП интегрирующего типа
АЦП интегрирующего типа
 Диаграмма преобразования для АЦП интегрирующего типа
Диаграмма преобразования для АЦП интегрирующего типа
 АЦП последовательного приближения
АЦП последовательного приближения
 Фрагмент блок схемы алгоритма
Фрагмент блок схемы алгоритма
 Датчики тока
Датчики тока
 Датчик тока на основе измерительных трансформаторов тока
Датчик тока на основе измерительных трансформаторов тока
 Датчик напряжения
Датчик напряжения
 Датчик ЭДС
Датчик ЭДС
 Инерционный датчик ЭДС
Инерционный датчик ЭДС
 Схема инерционного датчика ЭДС
Схема инерционного датчика ЭДС
 Схема датчика ЭДС с уменьшенной инерционностью
Схема датчика ЭДС с уменьшенной инерционностью
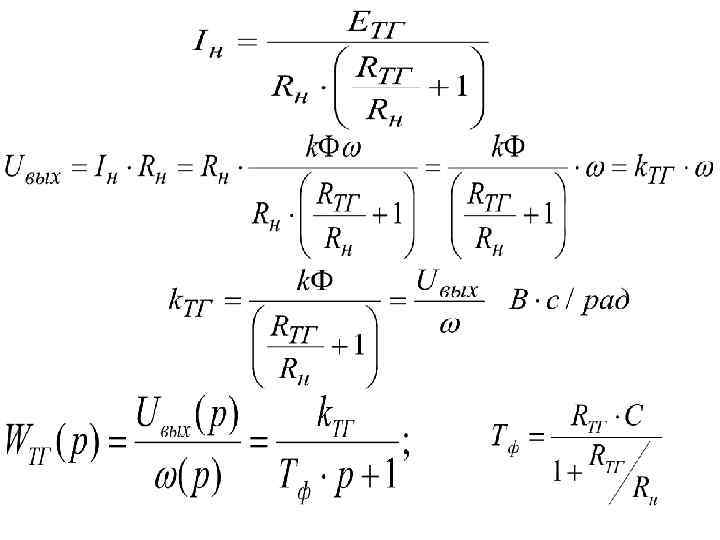
 Тахогенератор постоянного тока
Тахогенератор постоянного тока
 Тахогенератор переменного тока
Тахогенератор переменного тока
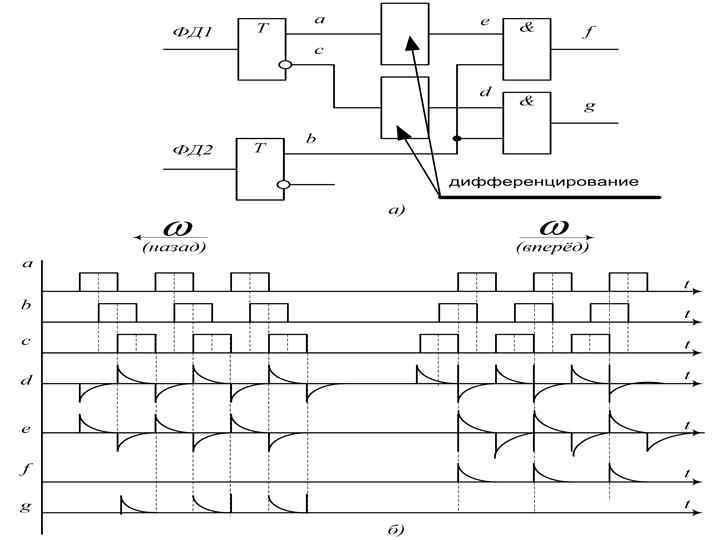
") Цифровые датчики скорости (энкодеры)
Цифровые датчики скорости (энкодеры)
 Цифровые датчики скорости
Цифровые датчики скорости
 Конструкция сельсина
Конструкция сельсина
 Функциональная и электрическая схемы сельсина
Функциональная и электрическая схемы сельсина
 Амплитудный режим сельсина Относительно угла
Амплитудный режим сельсина Относительно угла
 Характеристика управления сельсина
Характеристика управления сельсина
 Режим фазовращателя для сельсина
Режим фазовращателя для сельсина
 Схема включения двух сельсинов в индикаторном режиме
Схема включения двух сельсинов в индикаторном режиме
") Схема включения двух сельсинов для измерения рассогласования углов (трансформаторный режим)
Схема включения двух сельсинов для измерения рассогласования углов (трансформаторный режим)
 Схема дистанционной передачи угла
Схема дистанционной передачи угла
 Дифференциальный сельсин
Дифференциальный сельсин
 Конструкция вращающегося трансформатора
Конструкция вращающегося трансформатора
 Схема включения СКВТ для измерения разности углов поворота двух осей
Схема включения СКВТ для измерения разности углов поворота двух осей
 Схема компенсации реакции ротора
Схема компенсации реакции ротора
 Конструкция редуктосина
Конструкция редуктосина
 Поворотный редуктосин
Поворотный редуктосин
") Цифровой датчик угла (абсолютный энкодер)
Цифровой датчик угла (абсолютный энкодер)
 Тензорезисторы
Тензорезисторы
 Индуктивные измерительные преобразователи
Индуктивные измерительные преобразователи
 Индукционные измерительные преобразователи
Индукционные измерительные преобразователи
 Емкостные измерительные преобразователи Емкость С между двумя параллельными проводящими плоскостями площадью s, разделенными малым зазором δ, без учета краевого эффекта определяется выражением
Емкостные измерительные преобразователи Емкость С между двумя параллельными проводящими плоскостями площадью s, разделенными малым зазором δ, без учета краевого эффекта определяется выражением
 Проводниковые терморезисторы Медные терморезисторы. где α температурный коэффициент электрического сопротивления, равный 4, 25 х 10 3 1/°С; T температура, °С; R 0 сопротивление при 0 °С. Платиновые терморезисторы. Зависимость сопротивления платины от температуры нелинейная и имеет вид: в интервале температур T от 0 до +660°С в интервале температур от 0 до 180°С где R 0 сопротивление при 0°С; А, В, С- постоянные.
Проводниковые терморезисторы Медные терморезисторы. где α температурный коэффициент электрического сопротивления, равный 4, 25 х 10 3 1/°С; T температура, °С; R 0 сопротивление при 0 °С. Платиновые терморезисторы. Зависимость сопротивления платины от температуры нелинейная и имеет вид: в интервале температур T от 0 до +660°С в интервале температур от 0 до 180°С где R 0 сопротивление при 0°С; А, В, С- постоянные.
 где RT - сопротивление термистора; А и В коэффициенты; Tk абсолютная") Полупроводниковые терморезисторы (термисторы) где RT - сопротивление термистора; А и В коэффициенты; Tk абсолютная температура.
Полупроводниковые терморезисторы (термисторы) где RT - сопротивление термистора; А и В коэффициенты; Tk абсолютная температура.
 Термоэлектрические измерительные преобразователи
Термоэлектрические измерительные преобразователи
 Фотодатчики
Фотодатчики
 где IФ фототок; с постоянная, определяемая свойствами материала; U— напряжение, приложенное к фоторезистору (напряжение на фотодиоде); Ф поток излучения, падающий на светочувствительную поверхность фоторезистора; γ, α коэффициенты нелинейности; IS — обратный ток через р- п переход; D - коэффициент; S интегральная токовая чувствительность фотодиода.
где IФ фототок; с постоянная, определяемая свойствами материала; U— напряжение, приложенное к фоторезистору (напряжение на фотодиоде); Ф поток излучения, падающий на светочувствительную поверхность фоторезистора; γ, α коэффициенты нелинейности; IS — обратный ток через р- п переход; D - коэффициент; S интегральная токовая чувствительность фотодиода.
 Элементы Холла
Элементы Холла
 Интегральные полупроводниковые датчики
Интегральные полупроводниковые датчики
 ДАТЧИКИ СИЛОМОМЕНТНОГО И ТАКТИЛЬНОГО ОЧУВСТВЛЕНИЯ Сборочный робот с силомоментным датчиком, устанавливаемым в основании координатного стола: 1— робот; 2 — питатели; 3 — датчик
ДАТЧИКИ СИЛОМОМЕНТНОГО И ТАКТИЛЬНОГО ОЧУВСТВЛЕНИЯ Сборочный робот с силомоментным датчиком, устанавливаемым в основании координатного стола: 1— робот; 2 — питатели; 3 — датчик
 Кварцевый датчик силы: 1 — силораспределителный элемент; 2 —корпус в виде упругой гильзы; 3 — кварцевые шайбы
Кварцевый датчик силы: 1 — силораспределителный элемент; 2 —корпус в виде упругой гильзы; 3 — кварцевые шайбы
 Пьезоэлектрический трансформаторный датчик: а — схема; б — вариант конструктивного оформления; 1, 3 — демпфирующие прокладки; 2 — пьезоэлектрический трансформатор; 4 — силовводящнй элемент в виде стального ша ика; 5 — снлораспределители; 6 — корпус р
Пьезоэлектрический трансформаторный датчик: а — схема; б — вариант конструктивного оформления; 1, 3 — демпфирующие прокладки; 2 — пьезоэлектрический трансформатор; 4 — силовводящнй элемент в виде стального ша ика; 5 — снлораспределители; 6 — корпус р
 Схема составного пьезоэлектрического трансформаторного датчика
Схема составного пьезоэлектрического трансформаторного датчика
 Магнитоупругий датчик со скрещенными обмотками: 1 чувствительный элемент; 2 — катушка возбуждения; 3 — измерительная катушка
Магнитоупругий датчик со скрещенными обмотками: 1 чувствительный элемент; 2 — катушка возбуждения; 3 — измерительная катушка
 Шестикомпонентный датчик сил и моментов; 1—присоединительные фланцы; 2—упругие элементы с фольговыми тензорезисторами; 3 — тензорезистор для измерения деформации сдвига; 4— тензорезистор, регистрирующий изгибные деформации и деформации растяжения сжатия
Шестикомпонентный датчик сил и моментов; 1—присоединительные фланцы; 2—упругие элементы с фольговыми тензорезисторами; 3 — тензорезистор для измерения деформации сдвига; 4— тензорезистор, регистрирующий изгибные деформации и деформации растяжения сжатия
 Модульный шестикомпонентный датчик сил и моментов
Модульный шестикомпонентный датчик сил и моментов
 Датчик касания Матрица датчиков касания: 1— стальная пластина; 2 — упругое покрытие; 3 — электрический контакт; 4 — диэлектрическая подложка
Датчик касания Матрица датчиков касания: 1— стальная пластина; 2 — упругое покрытие; 3 — электрический контакт; 4 — диэлектрическая подложка
 Тактильный датчик из эластомера: 1 — металлический электрод; 2 — шнур из силиконового проводящего каучука
Тактильный датчик из эластомера: 1 — металлический электрод; 2 — шнур из силиконового проводящего каучука
 Датчики проскальзывания: а — кристаллический; 1 — кристалл рошелевой соли; 2 — резиновый демпфер; 3 — выход датчика; 4 — сапфировая игла; 5 — металлическая мембрана; 6 — корпус; б — электромагнитный; 1 — масляный демпфер; 2 — катушка индуктивности; 3 — магнит; 4 — выход датчика; 5 — стальной шарик; 6 — резиновый демпфер; 7 — подвижный магнитопровод; в — магнитный; 1 — палец захвата; 2 — резиновый ролик; 3 — магнит; 4 — магнитная головка
Датчики проскальзывания: а — кристаллический; 1 — кристалл рошелевой соли; 2 — резиновый демпфер; 3 — выход датчика; 4 — сапфировая игла; 5 — металлическая мембрана; 6 — корпус; б — электромагнитный; 1 — масляный демпфер; 2 — катушка индуктивности; 3 — магнит; 4 — выход датчика; 5 — стальной шарик; 6 — резиновый демпфер; 7 — подвижный магнитопровод; в — магнитный; 1 — палец захвата; 2 — резиновый ролик; 3 — магнит; 4 — магнитная головка
 ЛОКАЦИОННЫЕ ДАТЧИКИ АДАПТИВНЫХ РОБОТОВ Расположение акустических датчиков на захвате манипулятора с локальным наведением
ЛОКАЦИОННЫЕ ДАТЧИКИ АДАПТИВНЫХ РОБОТОВ Расположение акустических датчиков на захвате манипулятора с локальным наведением
") Функциональная схема акустического датчика локального наведения манипулятора (штриховой линией показаны элементы, встроенные в захват)
Функциональная схема акустического датчика локального наведения манипулятора (штриховой линией показаны элементы, встроенные в захват)
 Принципиальная схема определения расстояния с помощью луча света
Принципиальная схема определения расстояния с помощью луча света
 Захват с оптическими Схема компоновки оптических локационными датчиками преобразователей: 1 — лампа накаливания; 2 — фотодиод; 3 — корпус
Захват с оптическими Схема компоновки оптических локационными датчиками преобразователей: 1 — лампа накаливания; 2 — фотодиод; 3 — корпус
 Схема сканирования объекта Принципиальная схема лазерного дальномера, работающего в режимах: а — импульсном; б — непрерывней; 1— электронный счетчик; 2 -видеоусилитель; 3 — фотоэлемент; 4 — врашаюшнйся зеркальный отражатель (модулятор); 5 — рубиновый стер жень; — зеркало; 7 — фотоумножитель; 8 в — фильтр; 9 — диафрагма; 10 — фазометр; 11 — фотодиод; 12 — полупроводниковый лазер
Схема сканирования объекта Принципиальная схема лазерного дальномера, работающего в режимах: а — импульсном; б — непрерывней; 1— электронный счетчик; 2 -видеоусилитель; 3 — фотоэлемент; 4 — врашаюшнйся зеркальный отражатель (модулятор); 5 — рубиновый стер жень; — зеркало; 7 — фотоумножитель; 8 в — фильтр; 9 — диафрагма; 10 — фазометр; 11 — фотодиод; 12 — полупроводниковый лазер
 Страна Функциональное назначение Тип преобразователя Быстродей Габаритные ствие, с размеры, мм Япония Датчик в захвате, пальцевый захват с равно ерным м давле ием н Очувствленный пневмозахват Струйный эластичный надувной 0, 1— 0, 5 Япония Швеция Пневмозахват ФРГ СССР США Вакуумный силь 0, 02 фонный датчик силы Пневмомеханичес 0, 1 кий Датчик наличия Струйный 0, 1 0, 05 объекта переключатель; пневмомеханичес кий Датчик наличия Струйный 0, 1— 0, 4 объекта турбулентный Датчик наличия Вакуумный 0, 09— 0, 1 объекта струйный Адаптивный за Вакуумный пнев 0, 1— 0, 05 хват момеханический самоориентирую щ ийся 3 X 4 Размер захвата 30 X 80 5 X 8 — — Матрица 4 X 5, оперирует с объектами, имеющими в плане размер до 70 мм
Страна Функциональное назначение Тип преобразователя Быстродей Габаритные ствие, с размеры, мм Япония Датчик в захвате, пальцевый захват с равно ерным м давле ием н Очувствленный пневмозахват Струйный эластичный надувной 0, 1— 0, 5 Япония Швеция Пневмозахват ФРГ СССР США Вакуумный силь 0, 02 фонный датчик силы Пневмомеханичес 0, 1 кий Датчик наличия Струйный 0, 1 0, 05 объекта переключатель; пневмомеханичес кий Датчик наличия Струйный 0, 1— 0, 4 объекта турбулентный Датчик наличия Вакуумный 0, 09— 0, 1 объекта струйный Адаптивный за Вакуумный пнев 0, 1— 0, 05 хват момеханический самоориентирую щ ийся 3 X 4 Размер захвата 30 X 80 5 X 8 — — Матрица 4 X 5, оперирует с объектами, имеющими в плане размер до 70 мм
 СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ Обобщенная структурная схема СТЗ: 1 — оптическая система и преобразователь свет —сигнал; 2 — блок АЦП и предварительной обработки видеосигнала; 3 — блок БЗУ и связи с ЭВМ; 4 — видеоконтрольное устройство; 5 — дисплей; 6 — ЭВМ; 7—блок синхронизации: 8 — осветительное устройство
СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ Обобщенная структурная схема СТЗ: 1 — оптическая система и преобразователь свет —сигнал; 2 — блок АЦП и предварительной обработки видеосигнала; 3 — блок БЗУ и связи с ЭВМ; 4 — видеоконтрольное устройство; 5 — дисплей; 6 — ЭВМ; 7—блок синхронизации: 8 — осветительное устройство