EKATERINA ROBOT.pptx
- Количество слайдов: 24




INFINITE RANGE WIRELESS ROBOT By: - E. SREEKANTH 11013458

CONTENTS: - Ø INTRODUCTION ØWIRELESS ROBOT ØDTMF TECHNOLOGY ØCOMPONENTS & technology ØHOW IT WORKS? ØAPPLICATIONS ØADVANTAGES ØCONCLUSION ØFUTURE OF ROBOT EKATERINA

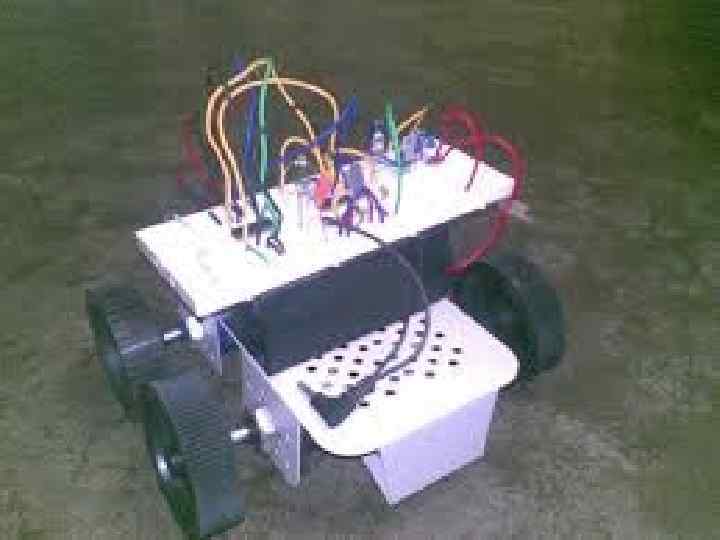
WIRELESS ROBOT: --- “A robot is a reprogrammable, multifunctional manipulator designed to move devices through variable programmed motions for the performance of a variety of tasks. ” The above one standard definition for robot but In My opinion A robot is nothing but a machine which Works under programming

DTMF BASED ROBOT: ANY ROBOT HAS THREE DISTINCT PHASES: PERCEPTION, PROCESSING AND , ACTION GENERALLY PERCEPTORS ARE SENSORS MOUNTED ON ROBOT BUT IN THIS CASE WE USE DTMF TECHNOLOGY AS PERCEPTION……. . PROCESSING IS DONE BY THE ON BOARD MICRO CONTROLLER AND THE TASK OR ACTION IS PERFORMED BY USING MOTOR’S OR WITH SOME OTHER ACTUATORS

Components: ü DTMF IC ü HEX INVERTER ü ATMEGA 16 ü L 293 D ü MOTOR

DUAL TONE MULTIPLE FREQUENCY IC: IT IS BASICALLY A DECODER IS USALLY USED TO DECODE A PARTICULAR FREQUENCIES OR KEY PRESS WHICH MEANS WE BUILT-INLY GIVES SOME ACTION IF PARTICULAR DECODE LOGIC HAPPNES ONE OF THE FINIEST DECODE EVER INVENTED IS DTMF UNLIKE THE REST OF DECODE THIS DECODER DECODES TONE FREQUENCIES GENERATED BY MOBILE PHONE AND WE PROGRAM ACCORDINGLY EXAMPLE: IF 2 IS PRESSED THE ROBOT SHOULD MOVE FORWARD DIRECTION WHICH TECHNICALLY MEANS BOTH THE MOTORS SHOULD ROTATE IN CLOCK WISE DIRECTION

HEX INVERTER: HEX INVERTER IS AN 14 PIN IC WHICH HAS UNIQUE CAPABILITY OF MAKING LOW POWER CONSUMPTION SINE WAVES… WORKING: HEX INVERTER CONSISTS OF 6 NOT GATES WHICH PERFORM LOGIC INVERT ACTION. THE OUTPUT OF INVERTER IS THE COMPLEMENT OF ITS INPUT LOGIC STATE.

ATMEGA 16: -ATMEGA 16 IS AN 8 BIT HIGH PERFORMANCE UC OF ATMEL’S MEGA AVR FAMILY WITH LOW POER CONSUMPTION. ATMEGA 16 IS BASED ON RISC ARCHITECTURE WITH 131 POWERFUL INSTRUCTIONS MOST OF THE INSTRUCTIONS EXECUTE IN ONE CYCLE ATMEGA 16 RECEIVES THE LOGIC FROM HEX INVERTER AND ACCORDINGLY GIVES LOGIC TO L 293 D UNLIKE 8051 ATMEGA 16 CAN USE ALL PORTA EITHER AS INPUT OR OUTPUT TO MAKE INPUT PORTD=0 x 00; //MAKING INPUT PORTD=0 x. FF; //MAKING OUTPUT PORT
: ----L 293 D IS A MOTOR DRIVER CIRCUIT. L 293")
L 293 D(MOTOR DRIVER): ----L 293 D IS A MOTOR DRIVER CIRCUIT. L 293 D is a dual H-bridge motor driver integrated circuit (IC). Motor drivers act as current amplifiers since they take a lowcurrent control signal and provide a higher-current signal. This higher current signal is used to drive the motors. L 293 D contains two inbuilt H-bridge driver circuits. In its common mode of operation, two DC motors can be driven simultaneously, both in forward and reverse direction. The motor operations of two motors can be controlled by input logic at pins 2 & 7 and 10 & 15. Input logic 00 or 11 will stop the corresponding motor. Logic 01 and 10 will rotate it in clockwise and anti clock-wise directions, respectively.

How it work’s? LOW POWER CONSUMPTION SINE WAVES SEND LOGIC TO MICROCONTROLLER ASSIGN DIRECTION TO MOTOR PERCEPTION KEY PRESS IN MOBILE PHONE GIVE DIRECTIONS HURRAY TO MOTORS ROBOT IS MOVING……. HAHA

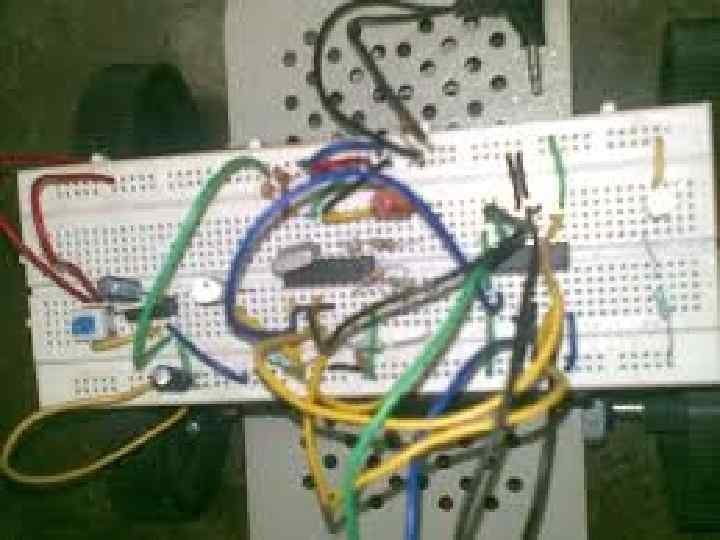
Circuit diagram of dtmf based robot: ---


AUTOMATED HOME: we can control our home appliances with dtmf by using relay and uln 2003 Temperature control: We can connect ATMEGA 16 pin to emergency fan and we can on it in case of big fire or the temperature is more that 65 degrees

scientific: Remote control vehicles have various scientific uses including hazardous environments, working in the deep ocean , and space exploration. The majority of the probes to the other planets in our solar system have been remote control vehicles, although some of the more recent ones were partially autonomous Military usage as remote vehicles: Dtmf based robots or remote controlled robtos are extensively used in military especially to send where normally solider wouldn’t be able to go

Advantages of DTMF BASED ROBOT: ØPortable ØSupports multi-touch and multi user interaction ØConnects between DIGITAL world and PHYSICAL world ØInfinite range is possible ØCost effective ØRobot cum appliances control ØIt’s an open source
: CONFERENCE AND MEETING TEMPERATURE MEASURMENT HUMIDITY MEASURMEN T CLEANI NG")
Future of my project(EKATERINA): CONFERENCE AND MEETING TEMPERATURE MEASURMENT HUMIDITY MEASURMEN T CLEANI NG THE ROOM PRESSUR E SENSOR




Conclusion of seminar: - In single sentence we can define this device as “just buy a mobile and make the entire world at your disposal”

Tha nks for pay atte ing ntio n
EKATERINA ROBOT.pptx