

f24bb715f4fa491b06df7bd7728c56f3.ppt
- Количество слайдов: 37
 INC 551 Artificial Intelligence Lecture 8 Models of Uncertainty
INC 551 Artificial Intelligence Lecture 8 Models of Uncertainty
 Inference by Enumeration
Inference by Enumeration
 Bayesian Belief Network Model Causes -> Effect Graph Structure shows dependency
Bayesian Belief Network Model Causes -> Effect Graph Structure shows dependency
 Burglar Alarm Example My house has a burglar alarm but sometimes it rings because of an earthquake. My neighbors, John and Mary promise me to call if they hear the alarm. However, their ears are not perfect.
Burglar Alarm Example My house has a burglar alarm but sometimes it rings because of an earthquake. My neighbors, John and Mary promise me to call if they hear the alarm. However, their ears are not perfect.
 One Way to Create BBN
One Way to Create BBN
 Computing Probability = 0. 90 x 0. 70 x 0. 001 x 0. 999 x 0. 998 = 0. 00062
Computing Probability = 0. 90 x 0. 70 x 0. 001 x 0. 999 x 0. 998 = 0. 00062
 BBN Construction There are many ways to construct BBN of a problem because the events depend on each other (related). Therefore, it depends on the order of events that you consider. The most simple is the most compact.
BBN Construction There are many ways to construct BBN of a problem because the events depend on each other (related). Therefore, it depends on the order of events that you consider. The most simple is the most compact.
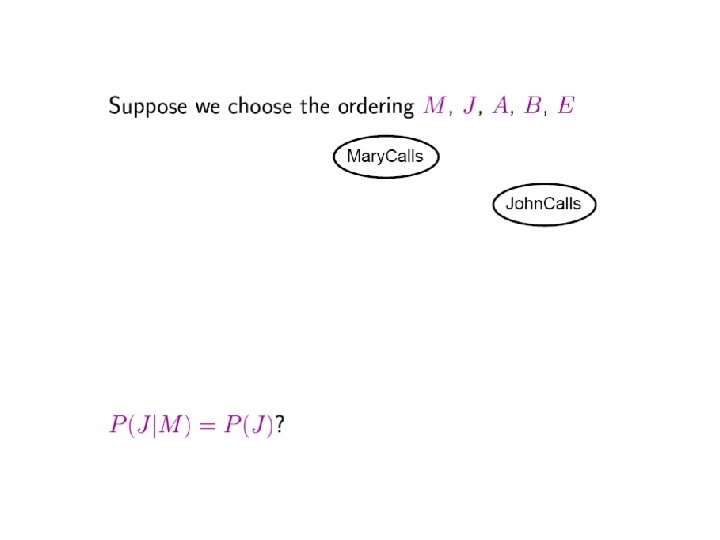
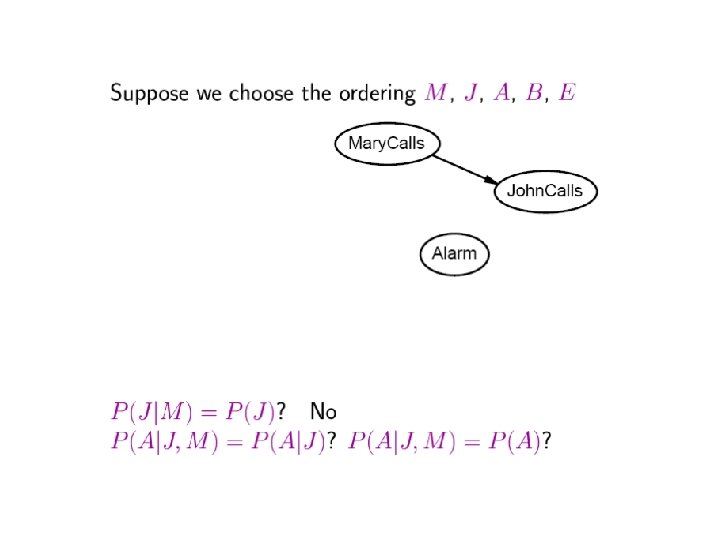
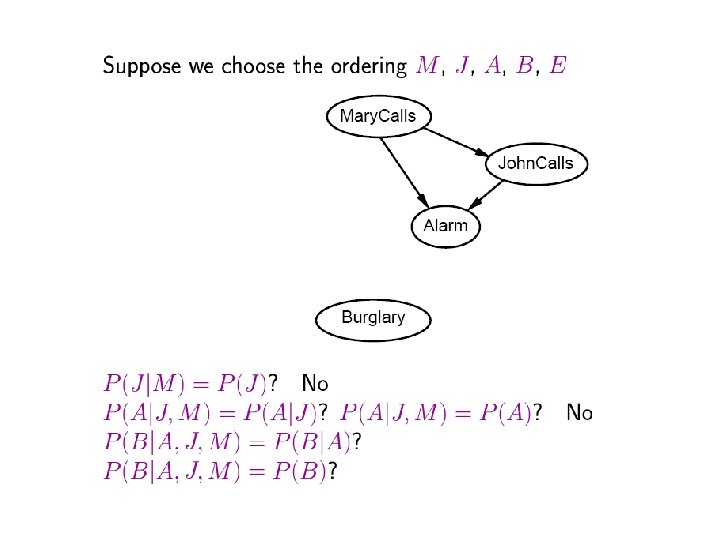
 Not compact
Not compact
 Inference Problem Find For example, find
Inference Problem Find For example, find
 Inference by Enumeration Note: let α is called “Normalized Constant” y are other events
Inference by Enumeration Note: let α is called “Normalized Constant” y are other events
") (summation of all events)
(summation of all events)
P(m|a) for every value of e") Calculation Tree Inefficient, Compute P(j|a)P(m|a) for every value of e
Calculation Tree Inefficient, Compute P(j|a)P(m|a) for every value of e
 and find α = 1/P(j, m)") Next, we have to find P(~b|j, m) and find α = 1/P(j, m)
Next, we have to find P(~b|j, m) and find α = 1/P(j, m)
 Approximate Inference Idea: Count from real examples We call this procedure “Sampling” Sampling = get real examples from the world model
Approximate Inference Idea: Count from real examples We call this procedure “Sampling” Sampling = get real examples from the world model
 Sampling Example Cloudy = มเมฆ Sprinkler = ละอองนำ
Sampling Example Cloudy = มเมฆ Sprinkler = ละอองนำ
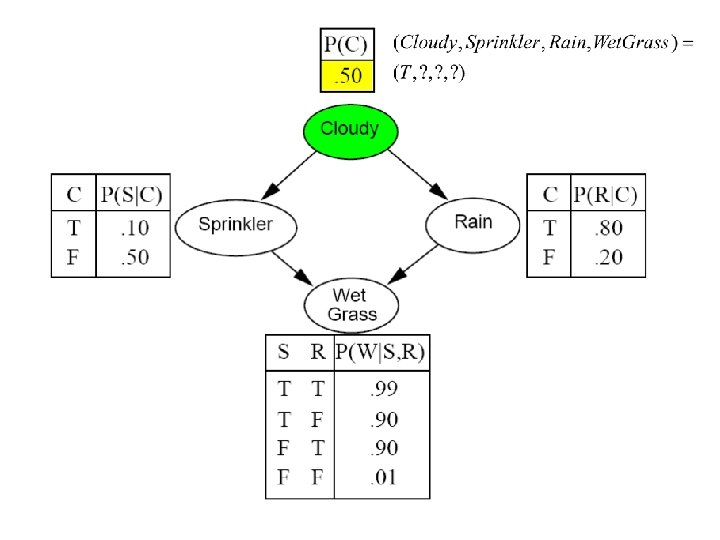
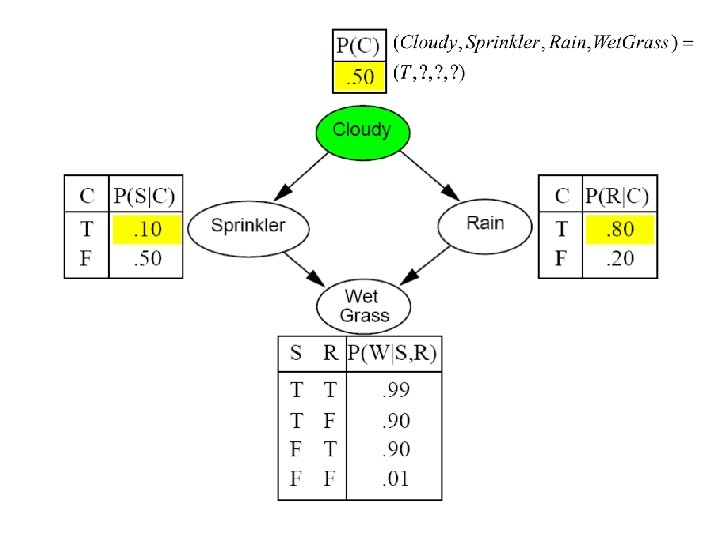
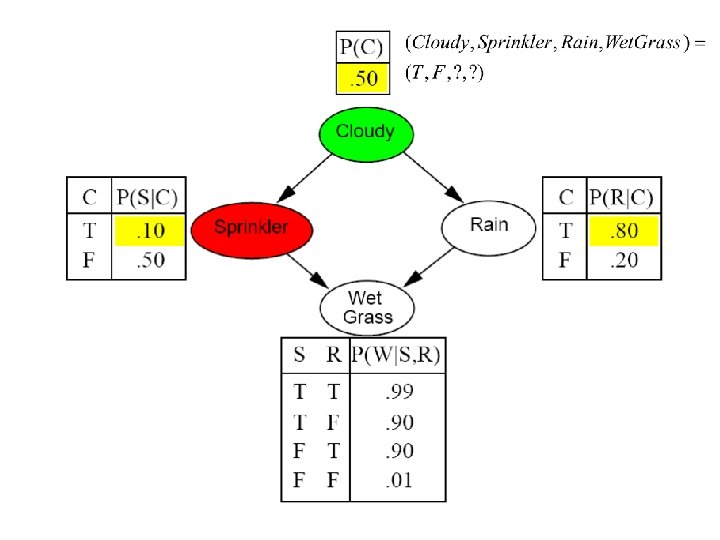
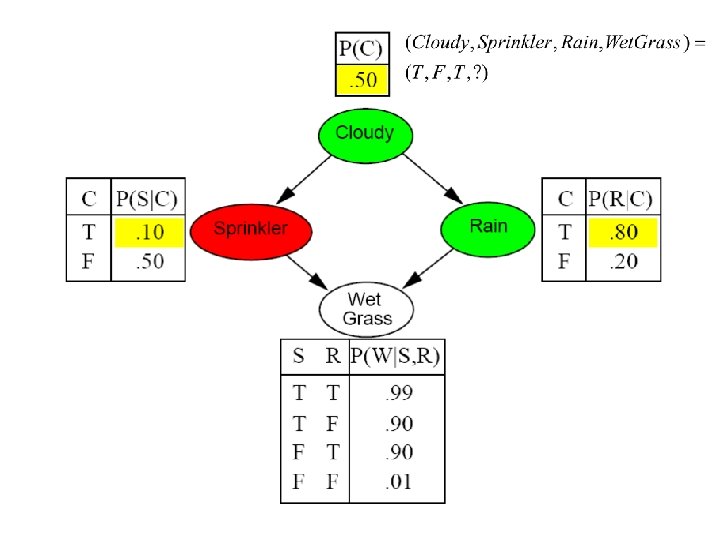
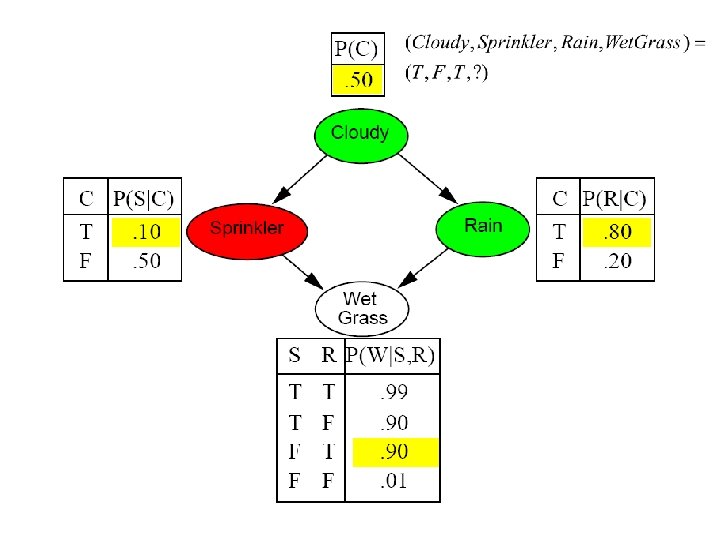
 1 Sample
1 Sample
 Rejection Sampling To find Idea: Count only the sample that agree with e
Rejection Sampling To find Idea: Count only the sample that agree with e
 Rejection Sampling Drawback: There are not many samples that agree with e From the example above, from 100 samples, only 27 are Usable.
Rejection Sampling Drawback: There are not many samples that agree with e From the example above, from 100 samples, only 27 are Usable.
 Likelihood Weighting Idea: Generate only samples that are relevant with e However, we must use “weighted sampling” e. g. Find
Likelihood Weighting Idea: Generate only samples that are relevant with e However, we must use “weighted sampling” e. g. Find
=0. 5") Weighted Sampling Fix sprinkler = TRUE Wet Grass = TRUE Sample from P(Cloudy)=0. 5 , suppose we get “true”
Weighted Sampling Fix sprinkler = TRUE Wet Grass = TRUE Sample from P(Cloudy)=0. 5 , suppose we get “true”
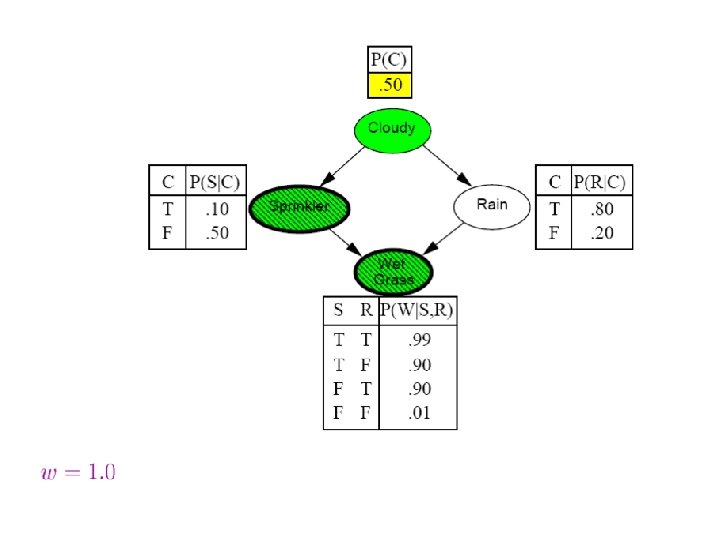
 Sprinkler already has value = true, therefore we multiply with weight = 0. 1
Sprinkler already has value = true, therefore we multiply with weight = 0. 1
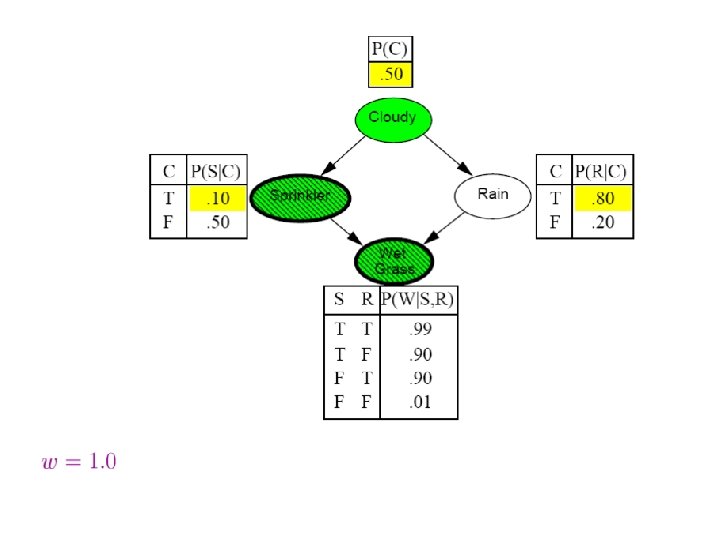
=0. 8 , suppose we get “true”") Sample from P(Rain)=0. 8 , suppose we get “true”
Sample from P(Rain)=0. 8 , suppose we get “true”
 Wet. Grass already has value = true, therefore we multiply with weight = 0. 99
Wet. Grass already has value = true, therefore we multiply with weight = 0. 99
 With weight = 0. 099") Finally, we got a sample (t, t, t, t) With weight = 0. 099
Finally, we got a sample (t, t, t, t) With weight = 0. 099
 When the events are tagged with timestamp Each node is considered") Temporal Model (Time) When the events are tagged with timestamp Each node is considered “state”
Temporal Model (Time) When the events are tagged with timestamp Each node is considered “state”
 Markov Process Let Xt = state For Markov processes, Xt depends only on finite number of previous xt
Markov Process Let Xt = state For Markov processes, Xt depends only on finite number of previous xt
 Each state has observation, Et. We cannot see “state”, but") Hidden Markov Model (HMM) Each state has observation, Et. We cannot see “state”, but we see “observation”.
Hidden Markov Model (HMM) Each state has observation, Et. We cannot see “state”, but we see “observation”.