c771683c69e7da14cf616ffbf1b9524b.ppt
- Количество слайдов: 25



GMDH Application for autonomous mobile robot’s control system construction A. V. Tyryshkin, A. A. Andrakhanov, A. A. Orlov Tomsk State University of Control Systems and Radioelectronics E-mail: rim 1282@mail. ru

Classification of existing autonomous robots

Nearest analog – agricultural AMR “Lukas”
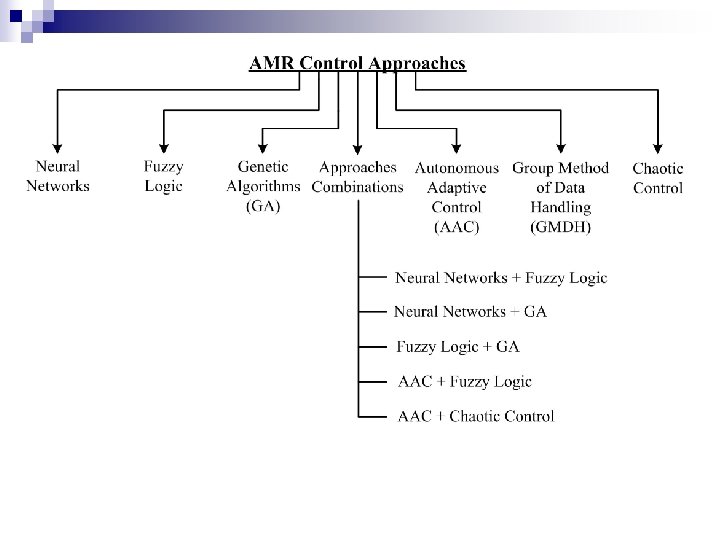

Basic works on GMDH application to AMR control n C. L. Philip Chen, A. D. Mc. Aulay Robot Kinematics Learning Computations Using Polynomial Neural Networks, 1991; n C. L. Philip Chen, A. D. Mc. Aulay Robot Kinematics Computations Using GMDH Learning Strategy, 1991; n F. Ahmed, C. L. Philip Chen An Efficient Obstacle Avoidance Scheme in Mobile Robot Path Planning using Polynomial Neural Networks, 1993; n C. L. Philip Chen, F. Ahmed Polynomial Neural Networks Based Mobile Robot Path Planning, 1993; n A. F. Foka, P. E. Trahanias Predictive Autonomous Robot Navigation, 2002; n T. Kobayashi, K. Onji, J. Imae, G. Zhai Nonliner Control for Autonomous Underwater Vehicles Using Group Method of Data Handling, 2007;

Part I Inductive approach to construction of AMR control systems

Problems of AMR design n n n Navigation Obstacle Recognition Autonomous Energy Supply Optimal Final Elements Control Technical State Diagnostics Objectives Execution Knowledge Gathering and Adaptation

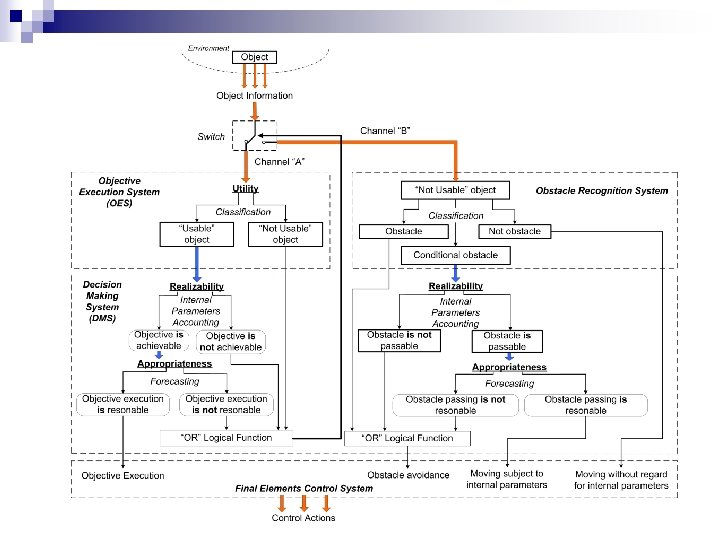
Generalized structure of AMR

Objective aspects of AMR control system construction n Utility n Classification n Realizability n Taking into account Internal system parameters n Appropriateness n Forecasting

Features of AMR obstacle recognition n Lack of objects’ a priori information Objects to recognize are complex ill-conditioned systems with fuzzy characteristics Objects are characterized by high amount of difficultlymeasurable parameters n It is necessary to take into account internal systems parameters for objects’ classification according to “obstacle/not obstacle” property, i. e. it isn’t possible to find out is this object obstacle or not without regard for system state. n There is no necessity to perform full object identification, i. e. it isn’t necessary to answer a question “What object is this? ”

Part II Autonomous Cranberry Harvester

Expected Engineering-and-economical Performance n Nominal Average AMR speed: n Cranberry harvesting coverage: n Relative density of harvested cranberry: n Total weight of harvested cranberry per season: n Season income: $

Automated cranberry harvester

Part III Simulation Results

Object Recognition Data Sample Learning samples – 92; Training samples – 50. Values’ Ranges: Object Length L Є [0; 20] м; Object Width w Є [0; 20] м; Object Height h Є [0; 20] м;

Recognizing Modified Polynomial Neural Network

Objective Functions’ Data Sample Learning samples – 140; Training samples – 140. Values’ Ranges: Surface density of cranberry distribution ρcranberry Є [0; 1] kg/m 2; Cranberry harvesting efficiency η Є [20; 75] %; Average AMR speed Vaverage Є [0; 7] km/h; Nominal average AMR speed Vnomaverage Є [2; 4] km/h; AMR engine fuel consumption per 100 km Pfuel Є [150; 600] liters/100 km. Values’ laws of variation:

Objective Functions Function of maximal cranberry harvest in preset time: Function of maximal cranberry harvest in minimal time: Function of maximal cranberry harvest with minimal fuel consumption:
 Obstacle recognition criterion values CR Percentage of Errors")
Main Indices of Simulation Data 1) Obstacle recognition criterion values CR Percentage of Errors 0. 055 12% 2) Objective Functions criterion values F(mcranberry, Δt) F(mcranberry, mfuel) CR BS 3. 8 e-4 9. 8 e-3 8. 6 e-3 0. 9 1. 8 e-3 1. 6

“Man should grant a maximal freedom to the computing machinery. Like a horseman having lost a way leave it to a discretion of his horse. . . ” A. G. Ivakhnenko. “Long-term forecasting and complex system control”, Publ. “Технiка”, Kiev, 1975. – p. 8.


Нахождение разделяющих областей в пространстве параметров распознавания

Современные состояние разработок в области АПК

Итерационный алгоритм МГУА с разделением обучения
c771683c69e7da14cf616ffbf1b9524b.ppt