ЭП с ДПТ ПВ (посл).ppt
- Количество слайдов: 34



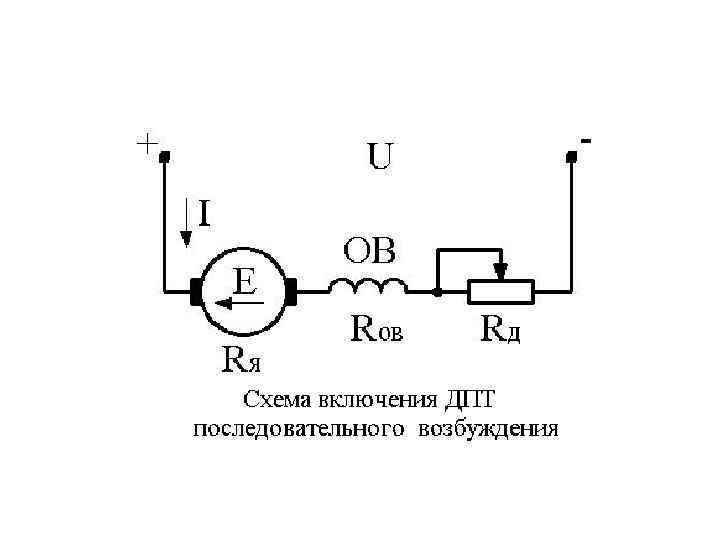
ЭП на базе двигателей с последовательным возбуждением. Двигатели с последовательным возбуждением находят широкое применение для ЭП в транспортных и подъемно-транспортных механизмах. Достоинство: высокая перегрузочная способность на низких скоростях. Пример: при перегрузке по току в 2 -2, 5 раза (пусковой ток) момент составляет (3 -3, 5)Мmax. Особенностью двигателей является то, что ток якоря является одновременно током возбуждения.

Магнитный поток двигателя.

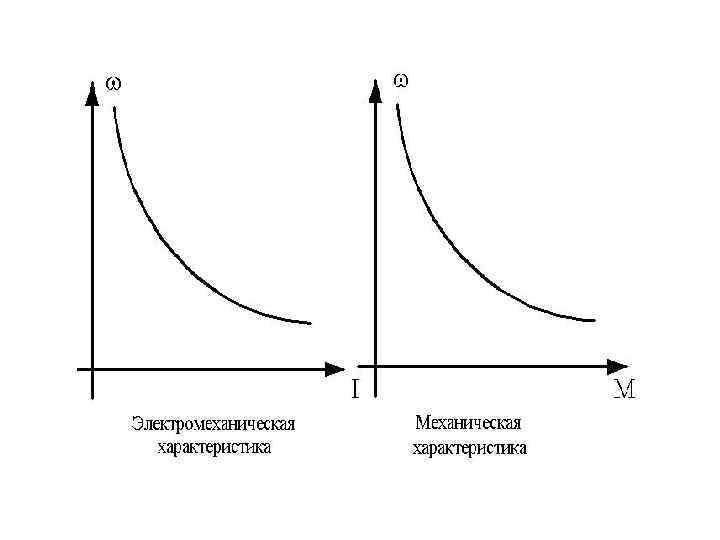
Характеристики двигателя описываются выражениями: – электромеханическая характеристика – механическая характеристика

Очень часто считают магнитный поток линейно зависимым от тока. При линейной аппроксимации потока Ф = α·I, α = tgφ, получим следующие характеристики: электромеханическая характеристика - -

Проведем анализ характеристик по этим выражениям: Найдем асимптоты: Исходя из этих выражений можем нарисовать характеристики:

Т. к. характеристики не пересекают ось ординат, то для этих двигателей отсутствует режим холостого хода (недопустим) и отсутствует генераторный режим (рекуперативное торможение). Основные режимы работы: 1). Двигательный режим 0 < ω < ∞; 2). Пусковой режим (режим короткого замыкания) ω = 0; 3). Тормозной режим (динамическое торможение и торможение противовключением). Простейшая аппроксимация зависимости магнитного потока от тока приводит к большим погрешностям, поэтому на практике пользуются универсальными характеристиками.
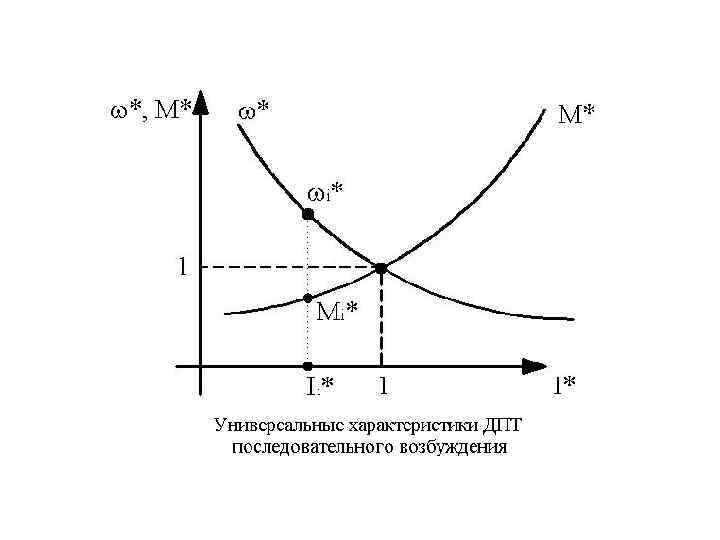

Универсальные характеристики представляют зависимости относительных скорости и момента от относительного тока: Где – паспортные данные.

Регулирование координат электропривода двигателя последовательного возбуждения. Из формул характеристик двигателя вытекают три способа регулирования скорости: 1). Изменение добавочного сопротивления в цепи якоря; 2). Изменение магнитного потока; 3). Изменение подводимого напряжения.
. Регулирование с помощью добавочного сопротивления. В цепь якоря включаются добавочные сопротивления, способ отличается")
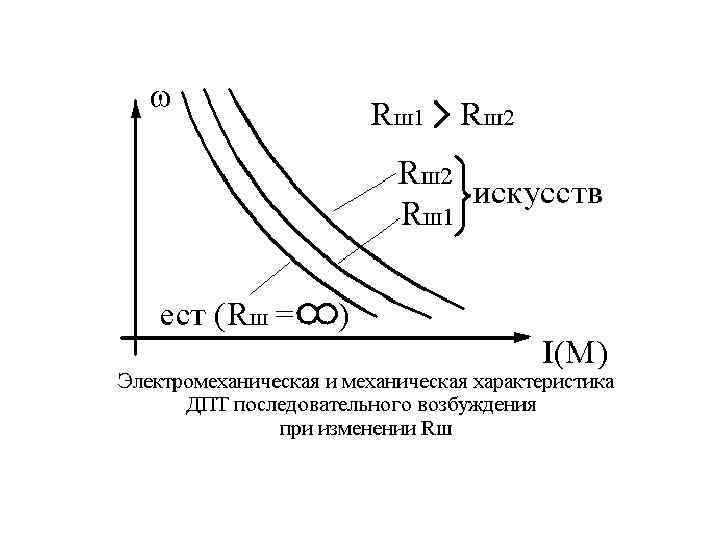
1). Регулирование с помощью добавочного сопротивления. В цепь якоря включаются добавочные сопротивления, способ отличается простотой реализации. Анализ зависимостей ω(I) и М(I) показывает, что с ростом сопротивления искусственные характеристики располагаются ниже естественной.
: 1. Плавность регулирования зависит от плавности")
Показатели регулирования: Диапазон регулирования D = (2÷ 3): 1. Плавность регулирования зависит от плавности изменения добавочных сопротивлений, как правило регулирование ступенчатое. Направленность регулирования вниз от естественной характеристики. - Стабильность скорости снижается с ростом сопротивления, одновременно снижается жесткость характеристик.

-Регулирование осуществляется при постоянном моменте. -Регулирование сопровождается потерями мощности в сопротивлениях, поэтому способ экономически целесообразен только при небольшом диапазоне регулирования или кратковременной работе на пониженной скорости.

Характеристики при регулировании.

Расчет сопротивлений производится при известной естественной характеристике. Пусть требуется рассчитать сопротивление для получения режима с параметрами ωи, Ми, Iи, для этого записывают выражения скоростных характеристик для скорости:

Значения Rя и RОВ находят по паспортным данным или приближенно по формуле : Если задан момент Ми (т. е. механическая характеристика), то первоначально используя универсальные характеристики определяют Iи, а затем это выражение подставляют в (*).
. Регулирование путем изменения магнитного потока. Может осуществляться двумя способами: 1). Шунтированием обмотки возбуждения.")
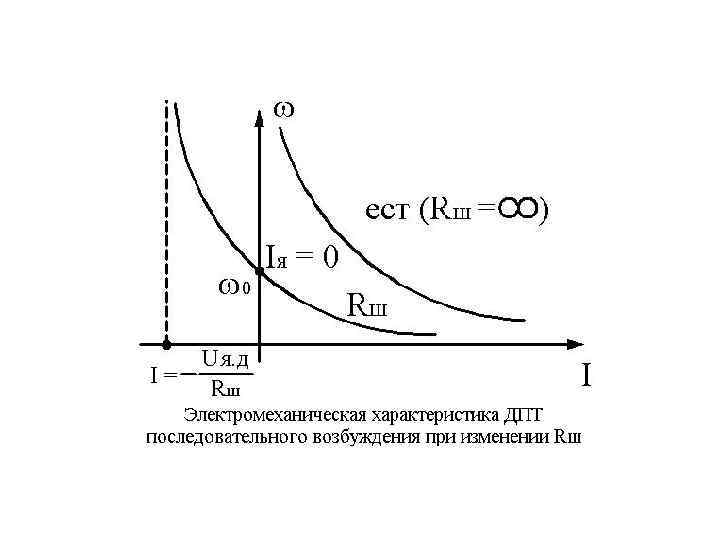
2). Регулирование путем изменения магнитного потока. Может осуществляться двумя способами: 1). Шунтированием обмотки возбуждения. 2). Шунтированием обмотки якоря.
. RШ = ∞ (нет цепи шунтирования) – получаем естественную характеристику. б). RШ ≠")
а). RШ = ∞ (нет цепи шунтирования) – получаем естественную характеристику. б). RШ ≠ ∞ - включен при неизменном токе якоря, ток возбуждения уменьшается, следовательно уменьшается магнитный поток и искусственные характеристики располагаются выше естественной. Показатели регулирования совпадают с показателями для двигателя с независимым возбуждением.

2.

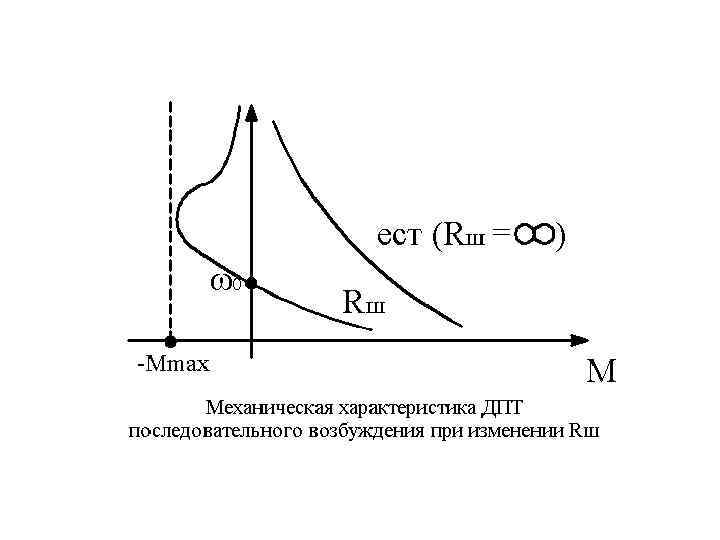
Ток возбуждения при наличии шунта увеличивается, магнитный поток увеличивается и искусственные характеристики располагаются ниже естественной, в токе возбуждения появляется составляющая, независящая от тока якоря (нагрузки), т. е. двигатель приобретает свойства двигателя со смешанным возбуждением. Это позволяет получить устойчивую, пониженную скорость ω0 при I, M = 0. Характеристики получаются жестче.
")
При скорости, большей ω > 0, ток якоря меняет свое направление (ЭДСдв > U) и это приводит к размагничиванию машины. Наличие устойчивой ω0 при шунтировании якоря позволяет осуществить рекуперативное торможение с отдачей энергии в сеть.
. Регулирование изменением подводимого напряжения. В качестве источника регулируемого напряжения может быть использован какой-либо")
3). Регулирование изменением подводимого напряжения. В качестве источника регулируемого напряжения может быть использован какой-либо преобразователь напряжения с управлением по типу СИФУ (система импульсно-фазового управления) или по типу ШИР (широтноимпульсное регулирование). Изменять напряжение можно только в сторону уменьшения, поэтому искусственные характеристики располагаются ниже естественной.

Показатели регулирования аналогичны приводу с двигателем независимого возбуждения за исключением жесткости характеристик и стабильности скорости.
. Динамическое торможение может")
30. Тормозные режимы двигателя. Для торможения привода используются два способа: 1). Динамическое торможение может применяться в двух случаях: а). Динамическое торможение по схеме с независимым возбуждением, для этого обмотка возбуждения подключается на независимый источник, а обмотка якоря отключается от сети и замыкается на гасящее сопротивление (см. схему двигателя с независимым возбуждением). Характеристики получаются те же, что и в схеме с независимым возбуждением.
. Динамическое торможение с самовозбуждением, для его осуществления необходимо выполнить следующие условия: -наличие остаточного")
б). Динамическое торможение с самовозбуждением, для его осуществления необходимо выполнить следующие условия: -наличие остаточного магнитного потока; -совпадение остаточного магнитного потока с основным магнитным потоком; - полное сопротивление в цепи якоря должно быть меньше критического.
 и осуществляют подключение")
Контакторы КМ используются для работы в нормальном режиме (в режиме двигателя) и осуществляют подключение двигателя к сети. КТ – контакторы торможения. При размыкании контактов КМ цепь якоря разрывается и ток возбуждения (ток якоря) становится равным нулю. Затем замыкаются контакты КТ, под действием остаточного магнитного поля в якоре будет наводиться ЭДС и в замкнутой цепи «якорь-обмотка возбуждения-Rд» появится ток. Ток возбуждения при этом сохранит свое первоначальное направление, обеспечив режим самовозбуждения. Машина превращается в генератор и тормозится.

ωгр – минимальная скорость, при которой возможен процесс самовозбуждения.
. Торможение противовключением осуществляется путем изменения полярности на обмотке якоря при сохранении направления тока")
2). Торможение противовключением осуществляется путем изменения полярности на обмотке якоря при сохранении направления тока в обмотке возбуждения или наоборот.

При таком включении ЭДС якоря и U действуют согласно, поэтому для ограничения тока включают добавочное сопротивление. Процесс торможения идет по линии A` - C, в точке С двигатель отключается.
.")
Торможение противовключением может быть использован как рабочий режим для опускания груза (режим протягивающего груза). В этом случае двигатель включен на подъем груза, для торможения вводится большое добавочное сопротивление, при котором Мкз < Мc (_ _ _). Процесс торможения идет по A - B` - B. Рабочий режим в IV квадранте: опускание груза со скоростью –ω.
ЭП с ДПТ ПВ (посл).ppt