

АМ(осн)1.ppt
- Количество слайдов: 76
 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ГЕНЕРАТОРЫ ДВИГАТЕЛИ Машины переменного тока Машины постоянного тока С И Н Х Р О Н Н Ы Е А С И Н Х Р О Н Н Ы Е Н Е З А В И С И М О Е В О З Б У Ж Д Е Н И Е П А Р А Л Л Е Л Ь Н О Е В О З Б У Ж Д Е Н И Е П В О С О Л З Е Д Б О У В А Ж ТЕ Д Л Е Ь Н Н О И Е Е С М Е Ш А Н О Е В О З Б У Ж Д Е Н И Е
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ГЕНЕРАТОРЫ ДВИГАТЕЛИ Машины переменного тока Машины постоянного тока С И Н Х Р О Н Н Ы Е А С И Н Х Р О Н Н Ы Е Н Е З А В И С И М О Е В О З Б У Ж Д Е Н И Е П А Р А Л Л Е Л Ь Н О Е В О З Б У Ж Д Е Н И Е П В О С О Л З Е Д Б О У В А Ж ТЕ Д Л Е Ь Н Н О И Е Е С М Е Ш А Н О Е В О З Б У Ж Д Е Н И Е
 Машины переменного тока Синхронные машины Асинхронные машины С фазным ротором С к. з. ротором
Машины переменного тока Синхронные машины Асинхронные машины С фазным ротором С к. з. ротором
 Асинхронные двигатели Основные законы электромеханики 1821 г. М. Фарадей 1873 г. Д. Максвелл : если магнитный поток, проходящий сквозь поверхность, ограниченную некоторым контуром, изменяется во времени, в контуре индуцируются ЭДС, равная скорости изменения магнитного потока Ампер А. М. (1775, Лион – 1836, Марсель) : На проводник с током в магнитном поле действует сила, модуль которой пропорционален силе протекающего по проводнику тока I, величине магнитной индукции B поля и длине проводника l
Асинхронные двигатели Основные законы электромеханики 1821 г. М. Фарадей 1873 г. Д. Максвелл : если магнитный поток, проходящий сквозь поверхность, ограниченную некоторым контуром, изменяется во времени, в контуре индуцируются ЭДС, равная скорости изменения магнитного потока Ампер А. М. (1775, Лион – 1836, Марсель) : На проводник с током в магнитном поле действует сила, модуль которой пропорционален силе протекающего по проводнику тока I, величине магнитной индукции B поля и длине проводника l
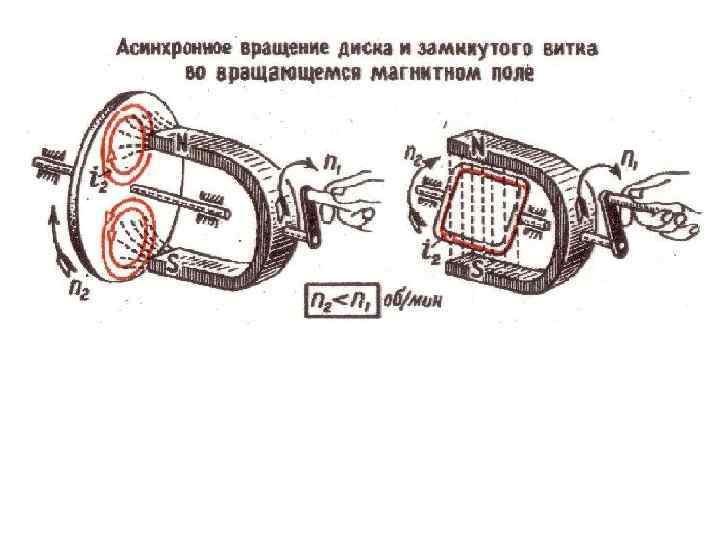
 МАШИНЫ ПЕРЕМЕННОГО ТОКА Принцип действия N S Если магнитное поле перемещать относительно замкнутого электрического контура, то в нем возникает ЭДС, согласно закона электромагнитной индукции. Появление тока в этом контуре, находящемся в магнитном поле (согласно закону Ампера) приводит к возникновению силы. Направление этой силы, согласно правилу Ленца, будет препятствовать относительному перемещению поля и контура. Если внешняя сила обусловливает перемещение магнитного поля относительно контура, то возникающая ЭДС стремится перемещать контур вслед за полем.
МАШИНЫ ПЕРЕМЕННОГО ТОКА Принцип действия N S Если магнитное поле перемещать относительно замкнутого электрического контура, то в нем возникает ЭДС, согласно закона электромагнитной индукции. Появление тока в этом контуре, находящемся в магнитном поле (согласно закону Ампера) приводит к возникновению силы. Направление этой силы, согласно правилу Ленца, будет препятствовать относительному перемещению поля и контура. Если внешняя сила обусловливает перемещение магнитного поля относительно контура, то возникающая ЭДС стремится перемещать контур вслед за полем.
 Вращающееся магнитное поле y y BA C A x x BB BC B Разместим три одинаковые катушки А, В. С так, чтобы плоскости их витков составляли между собой углы 1200 и пропустим через них трехфазный ток. При этом в каждой катушке возникает магнитное поле.
Вращающееся магнитное поле y y BA C A x x BB BC B Разместим три одинаковые катушки А, В. С так, чтобы плоскости их витков составляли между собой углы 1200 и пропустим через них трехфазный ток. При этом в каждой катушке возникает магнитное поле.
 y проекции на ось ОХ BA x BC BB проекции на ось ОУ
y проекции на ось ОХ BA x BC BB проекции на ось ОУ
 y BA x BC BB
y BA x BC BB
 Модуль индукции результирующего поля Эта индукция составит с осью ОУ в произвольный момент или Y BX B α X BY угол , равный
Модуль индукции результирующего поля Эта индукция составит с осью ОУ в произвольный момент или Y BX B α X BY угол , равный
 Таким образом, сложение трех однородных полей, пространственно наклоненных друг к другу на 1200 и сдвинутых во времени на 1/3 периода получается магнитное поле с постоянной индукцией, равномерно вращающееся с угловой скоростью, равной угловой частоте питающего трехфазного напряжения. Частота вращения магнитного поля n 1 зависит от частоты сети f 1 , числа пар полюсов р и не зависит от режима работы асинхронной машины и её нагрузки. где f 1 – частота тока питающей сети [с-1].
Таким образом, сложение трех однородных полей, пространственно наклоненных друг к другу на 1200 и сдвинутых во времени на 1/3 периода получается магнитное поле с постоянной индукцией, равномерно вращающееся с угловой скоростью, равной угловой частоте питающего трехфазного напряжения. Частота вращения магнитного поля n 1 зависит от частоты сети f 1 , числа пар полюсов р и не зависит от режима работы асинхронной машины и её нагрузки. где f 1 – частота тока питающей сети [с-1].
 Асинхронные двигатели Принцип формирования вращающегося магнитного поля е Еm e. A e. B e. C е. А=Еm sin( t), е. B=Еm sin( t – 3/2 ), t, град е. C=Еm sin( t + 3/2 ). C= +1200 B= – 1200 А Т Y Z С С А Y А В Z t 3 : i. B = + max, i. A=i. C < 0; С Х В t 4 : i. A = – max, i. B=i. C > 0 В Y Y В Х в) t = t 2 А Z С В Х г) t = t 3 Z С Х б) t = t 1 А t 1 : i. A = + max, i. B=i. C < 0; t 2 : i. C = – max, i. A=i. B > 0; А Y Z С В Х д) t = t 4
Асинхронные двигатели Принцип формирования вращающегося магнитного поля е Еm e. A e. B e. C е. А=Еm sin( t), е. B=Еm sin( t – 3/2 ), t, град е. C=Еm sin( t + 3/2 ). C= +1200 B= – 1200 А Т Y Z С С А Y А В Z t 3 : i. B = + max, i. A=i. C < 0; С Х В t 4 : i. A = – max, i. B=i. C > 0 В Y Y В Х в) t = t 2 А Z С В Х г) t = t 3 Z С Х б) t = t 1 А t 1 : i. A = + max, i. B=i. C < 0; t 2 : i. C = – max, i. A=i. B > 0; А Y Z С В Х д) t = t 4
 Особенности вращающегося магнитного поля: -вектор максимальной магнитной индукции всегда совпадает с осью той фазы, ток в которой максимален; -магнитное поле поворачивается в сторону оси той фазы, в которой ожидается ближайший максимум тока; - для изменения направления вращения поля необходимо изменить порядок чередования фаз (поменять две фазы).
Особенности вращающегося магнитного поля: -вектор максимальной магнитной индукции всегда совпадает с осью той фазы, ток в которой максимален; -магнитное поле поворачивается в сторону оси той фазы, в которой ожидается ближайший максимум тока; - для изменения направления вращения поля необходимо изменить порядок чередования фаз (поменять две фазы).
 Скольжение Отношение называют скольжением. Если ротор неподвижен n 2 = 0, то S = 1, если ротор вращается со скоростью магнитного поля n 2 = n 1, то S = 0. Скорость вращения магнитного потока относительно ротора
Скольжение Отношение называют скольжением. Если ротор неподвижен n 2 = 0, то S = 1, если ротор вращается со скоростью магнитного поля n 2 = n 1, то S = 0. Скорость вращения магнитного потока относительно ротора
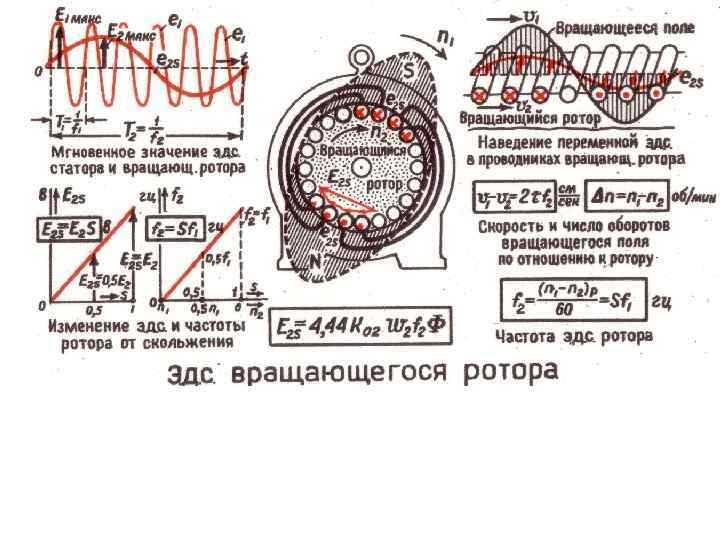
 Наличие скольжения приводит к тому, что частота ЭДС и тока в роторе f 2 будет величиной переменной. Скорость вращения магнитного потока относи. – тельно ротора Частота ЭДС, наводимой в обмотках ротора Учитывая получим Таким образом, чем медленнее вращается ротор (чем больше скольжение), тем выше частота тока в роторе f 2.
Наличие скольжения приводит к тому, что частота ЭДС и тока в роторе f 2 будет величиной переменной. Скорость вращения магнитного потока относи. – тельно ротора Частота ЭДС, наводимой в обмотках ротора Учитывая получим Таким образом, чем медленнее вращается ротор (чем больше скольжение), тем выше частота тока в роторе f 2.
 ЭДС, наводимые в обмотках статора и ротора. Вращающимся магнитным полем в обмотке статора наводится ЭДС где f 1 - частота сети W 1 - число витков ФМ - магнитный поток k 1 - коэффициент, зависящий от конструктивных особенностей обмотки
ЭДС, наводимые в обмотках статора и ротора. Вращающимся магнитным полем в обмотке статора наводится ЭДС где f 1 - частота сети W 1 - число витков ФМ - магнитный поток k 1 - коэффициент, зависящий от конструктивных особенностей обмотки
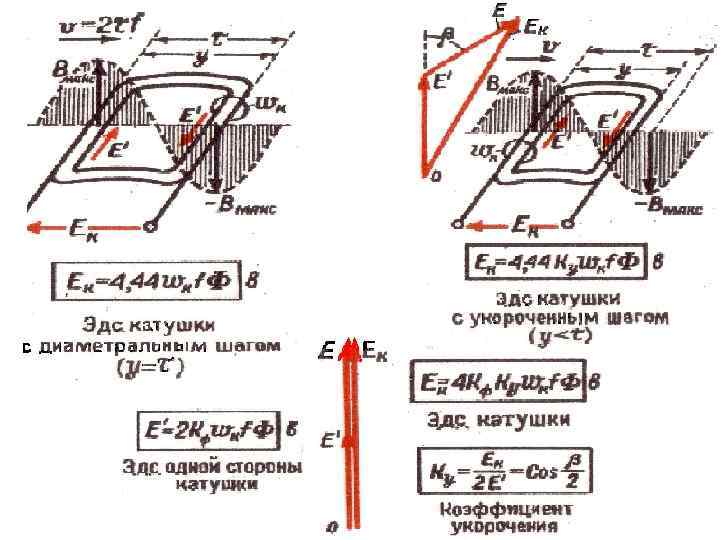
 Кривая изменения ЭДС в проводнике совпадает с кривой распределения магнитной индукции в воздушном зазоре. Действующее значение ЭДС проводника Среднее значение ЭДС проводника Действующее значение ЭДС проводника
Кривая изменения ЭДС в проводнике совпадает с кривой распределения магнитной индукции в воздушном зазоре. Действующее значение ЭДС проводника Среднее значение ЭДС проводника Действующее значение ЭДС проводника
 Если ротор неподвижен, то тем же потоком ФМ в его обмотке наводится ЭДС где W 2 - число витков k 2 - коэффициент обмотки ротора
Если ротор неподвижен, то тем же потоком ФМ в его обмотке наводится ЭДС где W 2 - число витков k 2 - коэффициент обмотки ротора
 Отношение ЭДС статора и ЭДС заторможенного ротора называется коэффициентом трансформации асинхронной машины. При вращении ротора меняется частота и ЭДС будет определяться Отношение Отсюда
Отношение ЭДС статора и ЭДС заторможенного ротора называется коэффициентом трансформации асинхронной машины. При вращении ротора меняется частота и ЭДС будет определяться Отношение Отсюда
 Результирующая ЭДС
Результирующая ЭДС
 Сопротивление ротора. Ток в обмотке ротора Активное сопротивление в цепи ротора при изменении частоты неизменно X 2 - реактивное сопротивление обмотки неподвижного ротора, X 2 S - реактивное сопротивление обмотки вращающегося ротора То есть Следовательно Ток в обмотке ротора определяется формулой
Сопротивление ротора. Ток в обмотке ротора Активное сопротивление в цепи ротора при изменении частоты неизменно X 2 - реактивное сопротивление обмотки неподвижного ротора, X 2 S - реактивное сопротивление обмотки вращающегося ротора То есть Следовательно Ток в обмотке ротора определяется формулой
 Так в обмотке ротора определяется формулой Разделим на S Действующее значение тока
Так в обмотке ротора определяется формулой Разделим на S Действующее значение тока
 Вращающий момент двигателя В создании вращающего момента А. Д. определяющими являются два фактора: магнитное поле статора и ток ротора, точнее его активная составляющая. Учитывая, что получим выражение для момента или
Вращающий момент двигателя В создании вращающего момента А. Д. определяющими являются два фактора: магнитное поле статора и ток ротора, точнее его активная составляющая. Учитывая, что получим выражение для момента или
 При работе двигателя в обычных условиях ЭДС статора Е 1 приблизительно равна напряжению сети U 1. Поэтому можно записать Если ротор неподвижен, то тем же потоком ФМ в его обмотке наводится ЭДС где W 2 - число витков k 2 - коэффициент обмотки ротора
При работе двигателя в обычных условиях ЭДС статора Е 1 приблизительно равна напряжению сети U 1. Поэтому можно записать Если ротор неподвижен, то тем же потоком ФМ в его обмотке наводится ЭДС где W 2 - число витков k 2 - коэффициент обмотки ротора
 Возьмем производную Откуда и Из последней формулы следует, что максимальный момент асинхронного двигателя не меняется при изменении активного сопротивления ротора. Однако, значительно меняется критическое скольжение. Возможность увеличения критического скольжения за счет увеличения активного сопротивления ротора (при неизменности M) широко используется при эксплуатации асинхронных двигателей.
Возьмем производную Откуда и Из последней формулы следует, что максимальный момент асинхронного двигателя не меняется при изменении активного сопротивления ротора. Однако, значительно меняется критическое скольжение. Возможность увеличения критического скольжения за счет увеличения активного сопротивления ротора (при неизменности M) широко используется при эксплуатации асинхронных двигателей.
 M R 2 X 2 0, 125 0, 25 MKP 0, 25 -1, 0 -0, 75 -0, 5 1, 0 0, 5 0, 75 1, 0 S -0, 25 Зависимость вращающего момента асинхронной машины от скольжения при различных значениях активного сопротивления цени ротора при изменении последнего от +∞ до -∞
M R 2 X 2 0, 125 0, 25 MKP 0, 25 -1, 0 -0, 75 -0, 5 1, 0 0, 5 0, 75 1, 0 S -0, 25 Зависимость вращающего момента асинхронной машины от скольжения при различных значениях активного сопротивления цени ротора при изменении последнего от +∞ до -∞
 Режимы работы трёхфазной асинхронной машины Асинхронная машина может работать в режимах двигателя, генератора и электромагнитного тормоза.
Режимы работы трёхфазной асинхронной машины Асинхронная машина может работать в режимах двигателя, генератора и электромагнитного тормоза.
 Режим двигателя Этот режим служит для преобразования потребляемой из сети электрической Энергии в механическую. Рассмотрим часть этой характеристики, соот. S F ветствующая режиму двигателя, т. е. при n 2 E n 1 скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Мпуск. Скольжение, N при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Мкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя Мкр / Mн = λ = 2 ÷ 3
Режим двигателя Этот режим служит для преобразования потребляемой из сети электрической Энергии в механическую. Рассмотрим часть этой характеристики, соот. S F ветствующая режиму двигателя, т. е. при n 2 E n 1 скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Мпуск. Скольжение, N при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Мкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя Мкр / Mн = λ = 2 ÷ 3
 Выше были получены формулы Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U 1 снижается перегрузочная способность асинхронного двигателя. Из выражения разделив М на Мкр, можно получить формулу, известную под названием «формула Клосса» , удобную для построения M = f(S).
Выше были получены формулы Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U 1 снижается перегрузочная способность асинхронного двигателя. Из выражения разделив М на Мкр, можно получить формулу, известную под названием «формула Клосса» , удобную для построения M = f(S).
 Участок характеристики, на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (МН, SН). В пределах изменения скольжения от 0 до SКР изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится. Участок характеристики, на котором скольжение изменяется от SКР до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
Участок характеристики, на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (МН, SН). В пределах изменения скольжения от 0 до SКР изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится. Участок характеристики, на котором скольжение изменяется от SКР до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
 Режим генератора Этот режим служит для преобразования механической энергии в электрическую, т. е. асинхронная машина должна развивать на валу тормозной момент и отдавать в сеть электрическую энергию. Асинхронная машина переходит в режим генератора, если ротор начинает вращаться быстрее магнитного поля (n > n 0). Этот режим может наступить, например, при регулировании частоты вращения ротора. S F n 1 n 2 E N Пусть n > n 0. При этом изменится (по сравнению с режимом двигателя) направление ЭДС и тока ротора, а также изменится направление электромагнитной силы и электромагнитного момента. Машина начинает развивать навалу тормозной момент (потребляет механическую энергию) и возвращает в сеть электрическую энергию (изменилось направление тока ротора, т. е. направление передачи электрической энергии).
Режим генератора Этот режим служит для преобразования механической энергии в электрическую, т. е. асинхронная машина должна развивать на валу тормозной момент и отдавать в сеть электрическую энергию. Асинхронная машина переходит в режим генератора, если ротор начинает вращаться быстрее магнитного поля (n > n 0). Этот режим может наступить, например, при регулировании частоты вращения ротора. S F n 1 n 2 E N Пусть n > n 0. При этом изменится (по сравнению с режимом двигателя) направление ЭДС и тока ротора, а также изменится направление электромагнитной силы и электромагнитного момента. Машина начинает развивать навалу тормозной момент (потребляет механическую энергию) и возвращает в сеть электрическую энергию (изменилось направление тока ротора, т. е. направление передачи электрической энергии).
 Режим электромагнитного тормоза Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т. е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении. Согласно рис. 2. 11 электромагнитная сила будет создавать тормозной электромагнитный момент, под действием которого будет снижаться частота вращения ротора, а затем произойдёт реверс. В режиме электромагнитного тормоза машина потребляет механическую энергию, развивая на валу тормозной момент, и одновременно потребляет из сети электрическую энергию. Вся эта энергия идёт на нагрев машины.
Режим электромагнитного тормоза Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т. е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении. Согласно рис. 2. 11 электромагнитная сила будет создавать тормозной электромагнитный момент, под действием которого будет снижаться частота вращения ротора, а затем произойдёт реверс. В режиме электромагнитного тормоза машина потребляет механическую энергию, развивая на валу тормозной момент, и одновременно потребляет из сети электрическую энергию. Вся эта энергия идёт на нагрев машины.
 Механическая характеристика асинхронного двигателя Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента n = f(M). Эту характеристику можно получить, используя зависимость M = f(S) и пересчитав частоту вращения ротора при разных значениях скольжения Так как S = (n 0 - n) / n 0, отсюда n = n 0(1 - S). Напомним, что n 0 = (60 f) / p – частота вращения магнитного поля. Участок 1 -3 соответствует устойчивой работе, участок 3 -4 – неустойчивой работе.
Механическая характеристика асинхронного двигателя Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента n = f(M). Эту характеристику можно получить, используя зависимость M = f(S) и пересчитав частоту вращения ротора при разных значениях скольжения Так как S = (n 0 - n) / n 0, отсюда n = n 0(1 - S). Напомним, что n 0 = (60 f) / p – частота вращения магнитного поля. Участок 1 -3 соответствует устойчивой работе, участок 3 -4 – неустойчивой работе.
 Работа асинхронного двигателя с нагрузкой на валу На рис. а рассматривается совместная работа асинхронного двигателя с нагрузкой на валу. Нагрузочный механизм соединяется с валом двигателя и при вращении создает момент сопротивления (момент нагрузки). При изменении нагрузки на валу автоматически изменяется частота вращения ротора, токи в обмотках ротора и статора и потребляемый из сети ток. Пусть двигатель работал с нагрузкой Мнагр 1 в точке 1 (рис. б). Если нагрузка на валу увеличится до значения Мнагр2, рабочая точка переместится в точку 2. При этом частота вращения ротора снизится (n 2
Работа асинхронного двигателя с нагрузкой на валу На рис. а рассматривается совместная работа асинхронного двигателя с нагрузкой на валу. Нагрузочный механизм соединяется с валом двигателя и при вращении создает момент сопротивления (момент нагрузки). При изменении нагрузки на валу автоматически изменяется частота вращения ротора, токи в обмотках ротора и статора и потребляемый из сети ток. Пусть двигатель работал с нагрузкой Мнагр 1 в точке 1 (рис. б). Если нагрузка на валу увеличится до значения Мнагр2, рабочая точка переместится в точку 2. При этом частота вращения ротора снизится (n 2
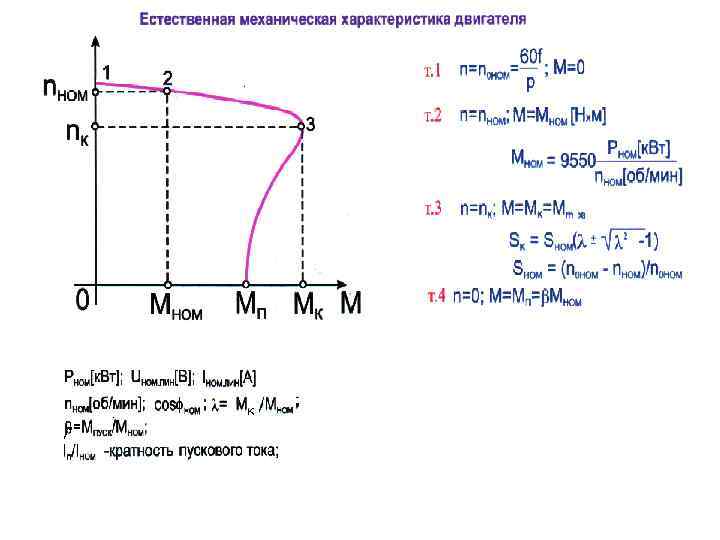
 Точка 1 соответствует идеальному холостому ходу двигателя, когда n = n 0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты Мн и nн. Точка 3 соответствует критическому моменту Мкр и критической частоте вращения nкр. Точка 4 соответствует пусковому моменту двигателя Мпуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1: n 0 = (60 f) /p, где: р – число пар полюсов машины; f – частота сети. Точка 2 с координатами nн и Мн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле здесь: Рн – номинальная мощность (мощность на валу).
Точка 1 соответствует идеальному холостому ходу двигателя, когда n = n 0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты Мн и nн. Точка 3 соответствует критическому моменту Мкр и критической частоте вращения nкр. Точка 4 соответствует пусковому моменту двигателя Мпуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1: n 0 = (60 f) /p, где: р – число пар полюсов машины; f – частота сети. Точка 2 с координатами nн и Мн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле здесь: Рн – номинальная мощность (мощность на валу).
 Точка 3 с координатами Мкр nкр. Критический момент рассчитывается по формуле Мкр = Мн λ. Перегрузочная способность λ задается в паспорте двигателя nкр = n 0 (1 - Sкр), Sн = (n 0 - nн) / n 0 – номинальное скольжение. Точка 4 имеет координаты n=0 и М=Мпуск. Пусковой момент вычисляют по формуле Мпуск = Мн λпуск, где: λпуск – кратность пускового момента задается в паспорте. Асинхронные двигатели имеют жесткую механическую характеристику, т. к. частота вращения ротора (участок 1– 3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей
Точка 3 с координатами Мкр nкр. Критический момент рассчитывается по формуле Мкр = Мн λ. Перегрузочная способность λ задается в паспорте двигателя nкр = n 0 (1 - Sкр), Sн = (n 0 - nн) / n 0 – номинальное скольжение. Точка 4 имеет координаты n=0 и М=Мпуск. Пусковой момент вычисляют по формуле Мпуск = Мн λпуск, где: λпуск – кратность пускового момента задается в паспорте. Асинхронные двигатели имеют жесткую механическую характеристику, т. к. частота вращения ротора (участок 1– 3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей
 Искусственные механические характеристики Построенная по паспортным данным двигателя механическая характеристика называется естественной. Если изменять величину подведенного напряжения, активное сопротивление ротора или другие параметры, то можно получить механические характеристики, отличные от естественной, которые называют искусственными. На рис. приведены механические характеристики двигателя при разной величине подведенного напряжения. Как следует из рисунка при понижении подведенного напряжения частота вращения магнитного поля n 0 остается неизменной, а уменьшается критический Мкр и пусковой Мпуск моменты, т. е. снижается перегру-зочная способность и ухудшаются пус-ковые свойства двигателя. При понижении подведенного напряжения механическая характеристика становится мягче.
Искусственные механические характеристики Построенная по паспортным данным двигателя механическая характеристика называется естественной. Если изменять величину подведенного напряжения, активное сопротивление ротора или другие параметры, то можно получить механические характеристики, отличные от естественной, которые называют искусственными. На рис. приведены механические характеристики двигателя при разной величине подведенного напряжения. Как следует из рисунка при понижении подведенного напряжения частота вращения магнитного поля n 0 остается неизменной, а уменьшается критический Мкр и пусковой Мпуск моменты, т. е. снижается перегру-зочная способность и ухудшаются пус-ковые свойства двигателя. При понижении подведенного напряжения механическая характеристика становится мягче.
 Ниже приведены механические характеристики двигателя при разной величине активного сопротивления ротора. Как следует из рисунка при увеличении активного сопротивления обмотки ротора за счет введения реостата Rдоб в цепь фазного ротора сохраняется неизменным Мкр, т. е. сохраняется перегрузочная способность двигателя, но происходит увеличение пускового момента. Частота вращения в режиме идеального холостого хода остается неизменной, равной n 0. С увеличением активного сопротивления обмотки ротора механические характеристики становятся мягче, т. е. ухудшается устойчивость работы двигателя.
Ниже приведены механические характеристики двигателя при разной величине активного сопротивления ротора. Как следует из рисунка при увеличении активного сопротивления обмотки ротора за счет введения реостата Rдоб в цепь фазного ротора сохраняется неизменным Мкр, т. е. сохраняется перегрузочная способность двигателя, но происходит увеличение пускового момента. Частота вращения в режиме идеального холостого хода остается неизменной, равной n 0. С увеличением активного сопротивления обмотки ротора механические характеристики становятся мягче, т. е. ухудшается устойчивость работы двигателя.
 Рабочие характеристики I 1 n; S; I 1 ; cos ; M M cos n 0 n S I 0 M 0 P 2 HOM P 2 Зависимости S, n, M, , I, от мощности P 2, отдаваемой на валу двигателя, принято называть рабочими характеристиками двигателя. Эти характеристики снимаются при постоянной частоте и напряжении на зажимах статора.
Рабочие характеристики I 1 n; S; I 1 ; cos ; M M cos n 0 n S I 0 M 0 P 2 HOM P 2 Зависимости S, n, M, , I, от мощности P 2, отдаваемой на валу двигателя, принято называть рабочими характеристиками двигателя. Эти характеристики снимаются при постоянной частоте и напряжении на зажимах статора.
 Векторные диаграммы асинхронного двигателя Электромагнитная энергия в асинхронном двигателе передается со статора на ротор аналогично тому, как в трансформаторе энергия передается из первичной цепи во вторичную. Действующее значение напряжения сети, в которую включен статор асинхронного двигателя, определяется уравнением Основной трудностью при построении векторной диаграммы работающего двигателя является разность частот статора f 1 и ротора f 2 причем f 2=S f 1. Можно построить две векторные диаграммы: для статора и для ротора. При построении полной векторной диаграммы все величины, относящиеся к ротору берутся приведенными.
Векторные диаграммы асинхронного двигателя Электромагнитная энергия в асинхронном двигателе передается со статора на ротор аналогично тому, как в трансформаторе энергия передается из первичной цепи во вторичную. Действующее значение напряжения сети, в которую включен статор асинхронного двигателя, определяется уравнением Основной трудностью при построении векторной диаграммы работающего двигателя является разность частот статора f 1 и ротора f 2 причем f 2=S f 1. Можно построить две векторные диаграммы: для статора и для ротора. При построении полной векторной диаграммы все величины, относящиеся к ротору берутся приведенными.
 +j j x 1·I 1 +j Ф I 1·r U 1 + I 1 -E 1 r 2 I 2 2 1 Ф + I 2 E 1 Рис. 6. 4. I 2·j 2 L 2 E 2
+j j x 1·I 1 +j Ф I 1·r U 1 + I 1 -E 1 r 2 I 2 2 1 Ф + I 2 E 1 Рис. 6. 4. I 2·j 2 L 2 E 2
 ЭДС ротора равна сумме активного падения напряжения и индуктивного падения напряжения Вектор магнитного потока Ф опережает векторы Е 2 и Е 1 на Ток I 0, который создает магнитный поток, опережает Ф на угол - угол потерь в стали. Ток статора определяется где - приведенный ток ротора
ЭДС ротора равна сумме активного падения напряжения и индуктивного падения напряжения Вектор магнитного потока Ф опережает векторы Е 2 и Е 1 на Ток I 0, который создает магнитный поток, опережает Ф на угол - угол потерь в стали. Ток статора определяется где - приведенный ток ротора
 Приведенный ток ротора создает ту же магнитодвижущую силу, что и истинный ток , но при обмотке ротора подобной во всем обмотке статора (одно число фаз, один обмоточный коэффициент, одно число витков), т. е. здесь - коэффициент приведения по току. m 1 и m 2 - число симметричных обмоток в цепях статора и ротора. ЭДС, наводимая в роторе Учитывая, что , получим
Приведенный ток ротора создает ту же магнитодвижущую силу, что и истинный ток , но при обмотке ротора подобной во всем обмотке статора (одно число фаз, один обмоточный коэффициент, одно число витков), т. е. здесь - коэффициент приведения по току. m 1 и m 2 - число симметричных обмоток в цепях статора и ротора. ЭДС, наводимая в роторе Учитывая, что , получим
 Разделив на S j x 1·I 1 Умножим это уравнение на коэффициент трансформации k, учитывая коэффици- I 1·r 1 U 1 -E 1 I’ 2 1 I 0 α r 2 I’ 2 2 I’ 2 Ф Это будет приведенное уравнение ротора. E 1 E 2 I’ 2·j x’ 2 ент приведения по току ki Векторная диаграмма примет вид.
Разделив на S j x 1·I 1 Умножим это уравнение на коэффициент трансформации k, учитывая коэффици- I 1·r 1 U 1 -E 1 I’ 2 1 I 0 α r 2 I’ 2 2 I’ 2 Ф Это будет приведенное уравнение ротора. E 1 E 2 I’ 2·j x’ 2 ент приведения по току ki Векторная диаграмма примет вид.
 машина: 1 — обмотки статора; 2 — обмотка ротора; 3") Рис. 1. Вращающаяся (цилиндрическая) машина: 1 — обмотки статора; 2 — обмотка ротора; 3 — сердечник статора; 4 — сердечник ротора; 5 — конструктивные детали статора; 6 — вал ротора; 7 — аксиально-радиальные опоры
Рис. 1. Вращающаяся (цилиндрическая) машина: 1 — обмотки статора; 2 — обмотка ротора; 3 — сердечник статора; 4 — сердечник ротора; 5 — конструктивные детали статора; 6 — вал ротора; 7 — аксиально-радиальные опоры
 2. Вращающаяся торцевая машина 1 — обмотки статора; 2 — обмотка ротора; 3 — сердечник статора; 4 — сердечник ротора; 5 — конструктивные детали статора; 6 — вал ротора; 7 — аксиально-радиальные опоры
2. Вращающаяся торцевая машина 1 — обмотки статора; 2 — обмотка ротора; 3 — сердечник статора; 4 — сердечник ротора; 5 — конструктивные детали статора; 6 — вал ротора; 7 — аксиально-радиальные опоры
 Рис. 4. Линейная цилиндрическая машина: 1 — обмотки статора; 2 — обмотки подвижной части; 3 — сердечник статора; 4 —сердечник подвижной части; 5 — конструктивные детали статора; 6 — шток подвижной части; 7 — опоры
Рис. 4. Линейная цилиндрическая машина: 1 — обмотки статора; 2 — обмотки подвижной части; 3 — сердечник статора; 4 —сердечник подвижной части; 5 — конструктивные детали статора; 6 — шток подвижной части; 7 — опоры
 Рис. 3. Линейная плоская машина: 1 — обмотки статора; 2 — обмотки подвижной части; 3 — сердечник статора; 4 —сердечник подвижной части; 5 — конструктивные детали статора; 6 — шток подвижной части; 7 — опоры
Рис. 3. Линейная плоская машина: 1 — обмотки статора; 2 — обмотки подвижной части; 3 — сердечник статора; 4 —сердечник подвижной части; 5 — конструктивные детали статора; 6 — шток подвижной части; 7 — опоры
 Рис. 5. Вращающаяся электрическая машина со встроенным редуктором: 1 — станина; 2 — сердечник статора; 3 — обмотка статора; 4 — ротор; 5 — вал ротора; 6 — шариковый подшипник; 7 — редуктор; 8 — вал редуктора
Рис. 5. Вращающаяся электрическая машина со встроенным редуктором: 1 — станина; 2 — сердечник статора; 3 — обмотка статора; 4 — ротор; 5 — вал ротора; 6 — шариковый подшипник; 7 — редуктор; 8 — вал редуктора
 Конструкция В 1889 г. М. О. Доливо-Добровольским был предложен и сконструирован трехфазный асинхронный двигатель. Асинхронная машина с короткозамкнутым ротором в разрезе: 1 – станина, 2 – сердечник статора, 3 – обмотка статора, 4 – сердечник ротора с короткозамкнутой обмоткой, 5 – вал.
Конструкция В 1889 г. М. О. Доливо-Добровольским был предложен и сконструирован трехфазный асинхронный двигатель. Асинхронная машина с короткозамкнутым ротором в разрезе: 1 – станина, 2 – сердечник статора, 3 – обмотка статора, 4 – сердечник ротора с короткозамкнутой обмоткой, 5 – вал.
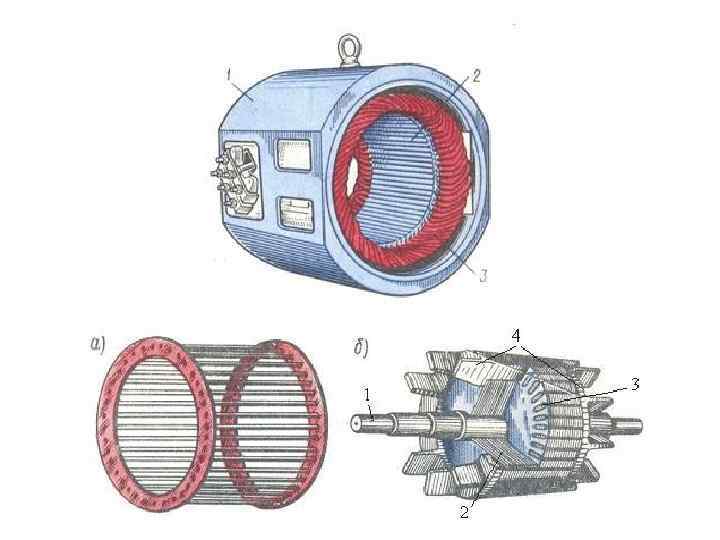
, закреплённый на станине. Обмотка") Начала и концы фаз выведены на клеммник (рис. 1 а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 1 б) или треугольник (рис. 1 в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл = 660 В по схеме звезда или в сеть с Uл =380 В – по схеме треугольник Рис. 1
Начала и концы фаз выведены на клеммник (рис. 1 а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 1 б) или треугольник (рис. 1 в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл = 660 В по схеме звезда или в сеть с Uл =380 В – по схеме треугольник Рис. 1
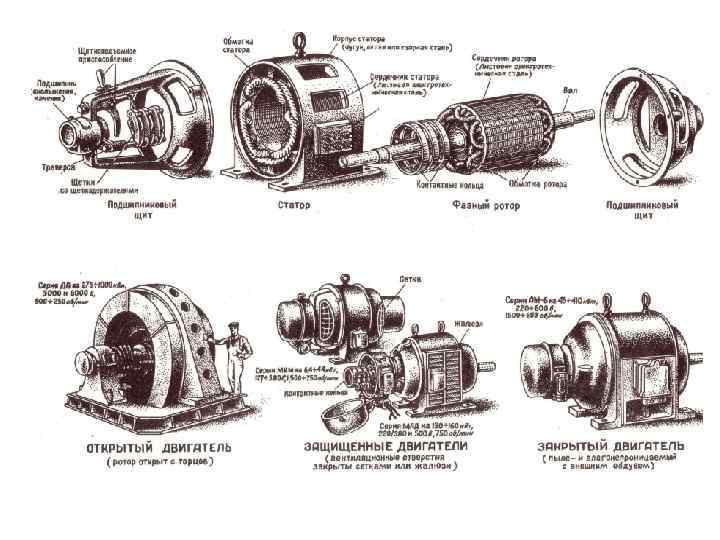
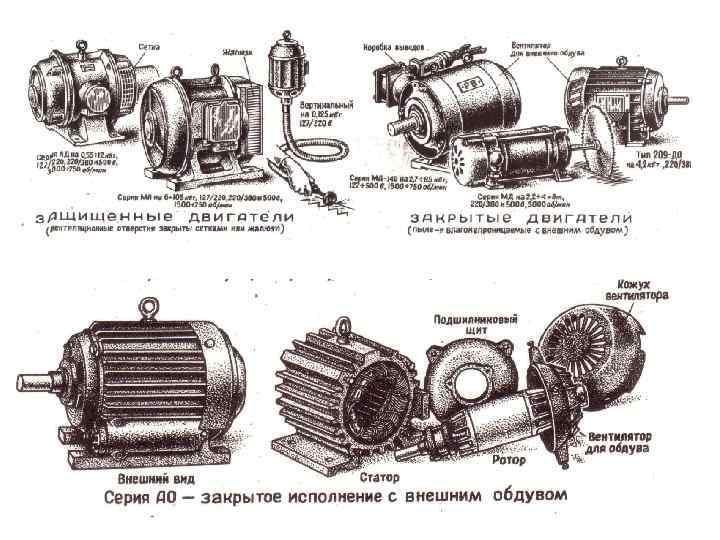
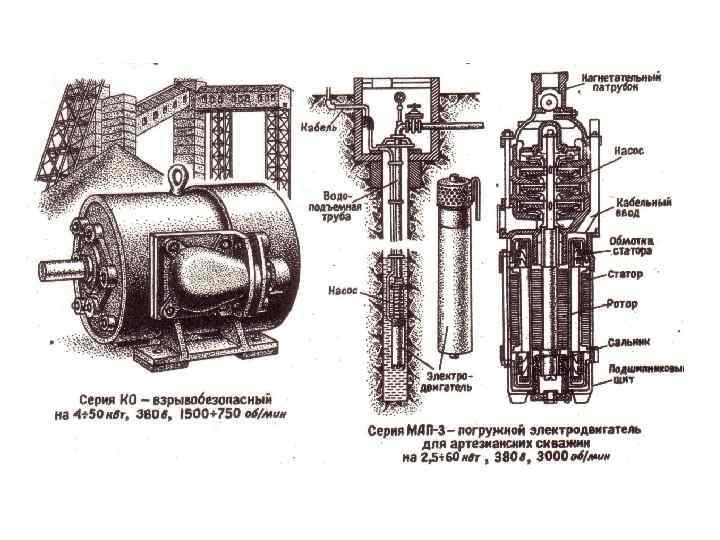
 На щитке машины, закреплённом на станине, приводятся данные: Рн, Uн, Iн, nн, а также тип машины. Рн – это номинальная полезная мощность (на валу) Uн и Iн – номинальные значения линейного напряжения и тока nн – номинальная частота вращения в об/мин. для указанной схемы соединения. Например, 380/220, Y/∆, Iн. Y/Iн∆. Тип машины, например, задан в виде 4 AH 315 S 8. Это асинхронный двигатель (А) четвёртой серии защищённого исполнения. Если буква Н отсутствует, то двигатель закрытого исполнения. 315 – высота оси вращения в мм; S – установочные размеры (они задаются в справочнике); 8 – число полюсов машины.
На щитке машины, закреплённом на станине, приводятся данные: Рн, Uн, Iн, nн, а также тип машины. Рн – это номинальная полезная мощность (на валу) Uн и Iн – номинальные значения линейного напряжения и тока nн – номинальная частота вращения в об/мин. для указанной схемы соединения. Например, 380/220, Y/∆, Iн. Y/Iн∆. Тип машины, например, задан в виде 4 AH 315 S 8. Это асинхронный двигатель (А) четвёртой серии защищённого исполнения. Если буква Н отсутствует, то двигатель закрытого исполнения. 315 – высота оси вращения в мм; S – установочные размеры (они задаются в справочнике); 8 – число полюсов машины.
 Асинхронные двигатели Основные параметры асинхронных двигателей Основные параметры Ток, А Частота вращен ия, об/мин КПД, % Cos φ Ммах —— Мн Мп — Мн Iп — Iн Масса, кг 220 380 0, 96 0, 55 2700 62 0. 8 2. 2 5. 5 4. 9 220 380 0, 94 0, 54 1300 53 0. 63 2. 2 2. 1 4. 4 4. 7 Модель Мощнос ть, к. Вт Напряжение, В 5 АИ 56 A 2 0. 18 5 АИ 56 A 4 0. 12
Асинхронные двигатели Основные параметры асинхронных двигателей Основные параметры Ток, А Частота вращен ия, об/мин КПД, % Cos φ Ммах —— Мн Мп — Мн Iп — Iн Масса, кг 220 380 0, 96 0, 55 2700 62 0. 8 2. 2 5. 5 4. 9 220 380 0, 94 0, 54 1300 53 0. 63 2. 2 2. 1 4. 4 4. 7 Модель Мощнос ть, к. Вт Напряжение, В 5 АИ 56 A 2 0. 18 5 АИ 56 A 4 0. 12
 Согласно ГОСТ 183 -74 устанавливаются следующие режимы работы двигателей: S 1 – продолжительный режим работы. Работа двигателя с постоянной нагрузкой достаточно продолжительное время для достижения установившегося режима; S 2 – кратковременный режим работы. Работа двигателя с постоянной нагрузкой в течении времени недостаточного для достижения установившегося режима, после чего следует остановка двигателя на время, достаточное для охлаждения машины до температуры, не более чем на 2 ОС превышающий температуру окружающей среды; S 3 – повторно кратковременный режим работы. Последовательность одинаковых циклов работы, двигателя при которой каждый цикл состоит из периода работы с постоянной нагрузкой и выключенного состояния. Тепловой режим двигателя в периоде работы с постоянной нагрузкой не достает установившегося значения, а в периоде включенного состояния двигатель не охлаждается до температуры окружающей среды; S 4 – повторно-кратковременный режим работы с частыми пусками. Режим работы аналогичен режиму S 3, только при этом количество пусков двигателя в час может достигать 240;
Согласно ГОСТ 183 -74 устанавливаются следующие режимы работы двигателей: S 1 – продолжительный режим работы. Работа двигателя с постоянной нагрузкой достаточно продолжительное время для достижения установившегося режима; S 2 – кратковременный режим работы. Работа двигателя с постоянной нагрузкой в течении времени недостаточного для достижения установившегося режима, после чего следует остановка двигателя на время, достаточное для охлаждения машины до температуры, не более чем на 2 ОС превышающий температуру окружающей среды; S 3 – повторно кратковременный режим работы. Последовательность одинаковых циклов работы, двигателя при которой каждый цикл состоит из периода работы с постоянной нагрузкой и выключенного состояния. Тепловой режим двигателя в периоде работы с постоянной нагрузкой не достает установившегося значения, а в периоде включенного состояния двигатель не охлаждается до температуры окружающей среды; S 4 – повторно-кратковременный режим работы с частыми пусками. Режим работы аналогичен режиму S 3, только при этом количество пусков двигателя в час может достигать 240;
 S 5 – повторно-кратковременный режим работы с частыми пусками и электрическим торможением. Режим работы аналогичен режиму S 4, только при этом для ускорения остановки двигателя используется электрическое торможение; S 6 – перемежающиеся режим работы. Последовательность одинаковых циклов работы двигателя, при которой каждый цикл состоит из периода работы с постоянной нагрузкой и периода холостого хода. Тепловой режим двигателя в периоде работы с постоянной нагрузкой не достигает установившегося значения; S 7 – перемежающейся режим работы с частыми пусками и электрическим торможением. Режим работы аналогичен S 6, только при этом для ускорения остановки двигателя используется электрическое торможение и количество пусков двигателя в час может достигать 240; S 8 – перемежающейся режим работы с двумя или более частотными вращения. Режим работы аналогичен , при этом двигатель будет работать на нескольких частотных вращения.
S 5 – повторно-кратковременный режим работы с частыми пусками и электрическим торможением. Режим работы аналогичен режиму S 4, только при этом для ускорения остановки двигателя используется электрическое торможение; S 6 – перемежающиеся режим работы. Последовательность одинаковых циклов работы двигателя, при которой каждый цикл состоит из периода работы с постоянной нагрузкой и периода холостого хода. Тепловой режим двигателя в периоде работы с постоянной нагрузкой не достигает установившегося значения; S 7 – перемежающейся режим работы с частыми пусками и электрическим торможением. Режим работы аналогичен S 6, только при этом для ускорения остановки двигателя используется электрическое торможение и количество пусков двигателя в час может достигать 240; S 8 – перемежающейся режим работы с двумя или более частотными вращения. Режим работы аналогичен , при этом двигатель будет работать на нескольких частотных вращения.
 Энергетическая диаграмма двигателя
Энергетическая диаграмма двигателя
 P 1 PВМП PС 1 Р 1=3 U 1 I 1 - подводимая к двигателю мощность; РМ 1 - мощность, затрачиваемая на нагрев про водников статора; РВМП - мощность вращающегося магнитного поля; PM 1 РС 1 - потери в стали в сердечнике статора; PЭМ PМЕХ PM 2 РЭМ - мощность электромагнитная; РМ 2 - мощность, затрачиваемая на нагрев проводников в роторе; РМЕХ - механическая мощность; РМП - механические потери; РД - дополнительные потери; Pд P 2 PMП Р 2 - полезная механическая мощность. РМЕХ=Р 1 -РМ 1 -РС-РМ 2 Р 2=РМЕХ-РМП-РД
P 1 PВМП PС 1 Р 1=3 U 1 I 1 - подводимая к двигателю мощность; РМ 1 - мощность, затрачиваемая на нагрев про водников статора; РВМП - мощность вращающегося магнитного поля; PM 1 РС 1 - потери в стали в сердечнике статора; PЭМ PМЕХ PM 2 РЭМ - мощность электромагнитная; РМ 2 - мощность, затрачиваемая на нагрев проводников в роторе; РМЕХ - механическая мощность; РМП - механические потери; РД - дополнительные потери; Pд P 2 PMП Р 2 - полезная механическая мощность. РМЕХ=Р 1 -РМ 1 -РС-РМ 2 Р 2=РМЕХ-РМП-РД
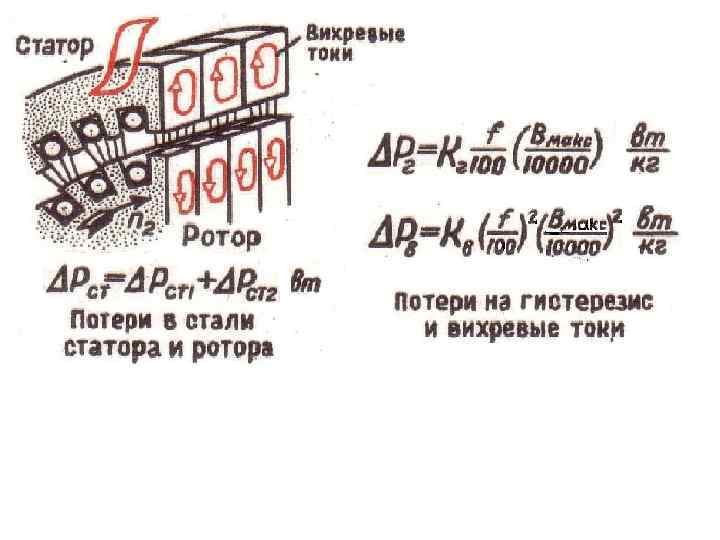

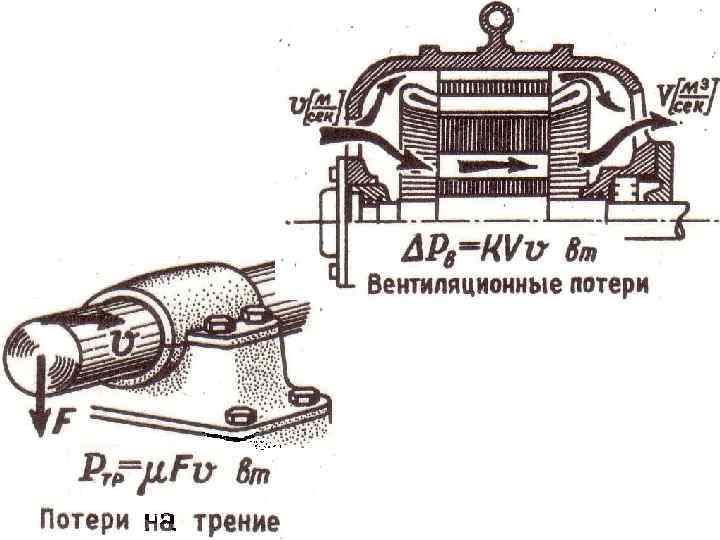
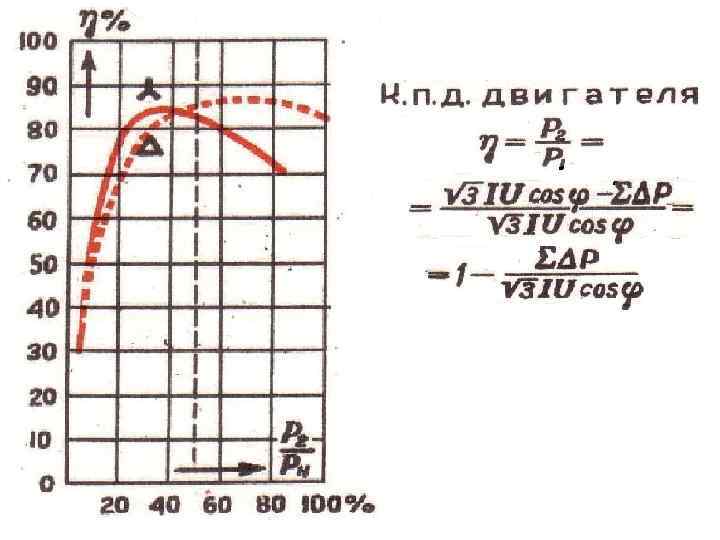

 Диаграмма реактивных мощностей двигателя изображена на рис, 24 -10, Основную часть реактивной мощности составляет мощность QM, которая из-за наличия воздушного зазора и большого, намагничивающего тока I 0 значительно больше, чем в трансформаторах. Большие величины QM и Iн существенно влияют на коэффициент мощности двигателя и снижают его . величину. Обычно у асинхронных двигателей cos φ„ = 0, 70 - 0, 95. Большие значения относятся к мощным двигателям с 2 р — 2 и 4. При уменьшении нагрузки cos φ двигателя значительно уменьшается, до значения cos φ = 0, 10 0, 15 при холостом ходе. На создание полей рассеяния первичной цепи расходуется реактивная мощность
Диаграмма реактивных мощностей двигателя изображена на рис, 24 -10, Основную часть реактивной мощности составляет мощность QM, которая из-за наличия воздушного зазора и большого, намагничивающего тока I 0 значительно больше, чем в трансформаторах. Большие величины QM и Iн существенно влияют на коэффициент мощности двигателя и снижают его . величину. Обычно у асинхронных двигателей cos φ„ = 0, 70 - 0, 95. Большие значения относятся к мощным двигателям с 2 р — 2 и 4. При уменьшении нагрузки cos φ двигателя значительно уменьшается, до значения cos φ = 0, 10 0, 15 при холостом ходе. На создание полей рассеяния первичной цепи расходуется реактивная мощность
 Реактивная мощность, расходуемая на создание Q 1 основного магнитного поля машины Реактивная мощность, расходуемая на создание q 1 вторичных полей рассеяния QМ При этом q 2
Реактивная мощность, расходуемая на создание Q 1 основного магнитного поля машины Реактивная мощность, расходуемая на создание q 1 вторичных полей рассеяния QМ При этом q 2
 Основную часть реактивной мощности составляет мощность QM, которая из-за наличия воздушного зазора и большого, намагничивающего тока I 0 значительно больше, чем в трансформаторах. Большие величины QM и Iн существенно влияют на коэффициент мощности двигателя и снижают его. величину. Обычно у асинхронных двигателей cos φ„ = 0, 70 - 0, 95. Большие значения относятся к мощным двигателям с 2 р — 2 и 4. При уменьшении нагрузки cos φ двигателя значительно уменьшается, до значения cos φ = 0, 10 -0, 15 при холостом ходе. На создание полей рассеяния первичной цепи расходуется реактивная мощность Реактивная мощность, расходуемая на создание основного магнитного поля машины Реактивная мощность, расходуемая на создание вторичных полей рассеяния При этом
Основную часть реактивной мощности составляет мощность QM, которая из-за наличия воздушного зазора и большого, намагничивающего тока I 0 значительно больше, чем в трансформаторах. Большие величины QM и Iн существенно влияют на коэффициент мощности двигателя и снижают его. величину. Обычно у асинхронных двигателей cos φ„ = 0, 70 - 0, 95. Большие значения относятся к мощным двигателям с 2 р — 2 и 4. При уменьшении нагрузки cos φ двигателя значительно уменьшается, до значения cos φ = 0, 10 -0, 15 при холостом ходе. На создание полей рассеяния первичной цепи расходуется реактивная мощность Реактивная мощность, расходуемая на создание основного магнитного поля машины Реактивная мощность, расходуемая на создание вторичных полей рассеяния При этом



