

 EKOHOMI 4 HA KI 6 EPHETUKA
EKOHOMI 4 HA KI 6 EPHETUKA
 Предметом економічної кібернетики є закони, принципи та інформаційні процеси управління соціально-економічними системами. Методи економічної кібернетики • Математичне програмування • Дослідження операцій • Економетрика Об’єкт
Предметом економічної кібернетики є закони, принципи та інформаційні процеси управління соціально-економічними системами. Методи економічної кібернетики • Математичне програмування • Дослідження операцій • Економетрика Об’єкт
 СИСТЕМА
СИСТЕМА
, YВ = g(XВ, h") Зворотній зв’язок YА = f(XА, q 1, q 2, …qn), YВ = g(XВ, h 1, h 2, …hm) Y = f(XА + g(Y, h 1, h 2, …hm), q 1, q 2, …qn),
Зворотній зв’язок YА = f(XА, q 1, q 2, …qn), YВ = g(XВ, h 1, h 2, …hm) Y = f(XА + g(Y, h 1, h 2, …hm), q 1, q 2, …qn),
 ДЛЯ РОЗВ’ЯЗУВАННЯ ДИФЕРЕНЦІАЛЬНИХ РІВНЯНЬ Синтаксис: Приклад : Розв'язати задачу Коші") ВИКОРИСТАННЯ КОМП'ЮТЕРА (ПАКЕТ MAXIMA) ДЛЯ РОЗВ’ЯЗУВАННЯ ДИФЕРЕНЦІАЛЬНИХ РІВНЯНЬ Синтаксис: Приклад : Розв'язати задачу Коші для диференціального рівняння першого порядку . Початкова умова: Для початкової умови призначений оператор ic 1.
ВИКОРИСТАННЯ КОМП'ЮТЕРА (ПАКЕТ MAXIMA) ДЛЯ РОЗВ’ЯЗУВАННЯ ДИФЕРЕНЦІАЛЬНИХ РІВНЯНЬ Синтаксис: Приклад : Розв'язати задачу Коші для диференціального рівняння першого порядку . Початкова умова: Для початкової умови призначений оператор ic 1.
 ДЛЯ ПОБУДОВИ ГРАФІКІВ Побудова функції однієї змінної: (%i 1) plot") ВИКОРИСТАННЯ КОМП'ЮТЕРА (ПАКЕТ MAXIMA) ДЛЯ ПОБУДОВИ ГРАФІКІВ Побудова функції однієї змінної: (%i 1) plot 2 d (sin(x), [x, -%pi, %pi])$ або (%i 1) plot 2 d (sec(x), [x, -2, 2], [y, -20, 20])$ Побудова функції двох змінних (%i 1) contour_plot (x^2 + y^2, [x, -4, 4], [y, -4, 4])$ Побудова тьох вимірного зображення (%i 1) plot 3 d (2^(-u^2 + v^2), [u, -3, 3], [v, -2, 2])$
ВИКОРИСТАННЯ КОМП'ЮТЕРА (ПАКЕТ MAXIMA) ДЛЯ ПОБУДОВИ ГРАФІКІВ Побудова функції однієї змінної: (%i 1) plot 2 d (sin(x), [x, -%pi, %pi])$ або (%i 1) plot 2 d (sec(x), [x, -2, 2], [y, -20, 20])$ Побудова функції двох змінних (%i 1) contour_plot (x^2 + y^2, [x, -4, 4], [y, -4, 4])$ Побудова тьох вимірного зображення (%i 1) plot 3 d (2^(-u^2 + v^2), [u, -3, 3], [v, -2, 2])$
 Інформація ОСНОВНІ ЗАКОНИ ТА ПРИНЦИПИ КІБЕРНЕТИКИ • Закон необхідної різноманітності. • Принцип вибору рішень на підставі відбору і перетворення інформації • Принцип обов'язковості зворотного зв'язку • Принцип зовнішнього доповнення
Інформація ОСНОВНІ ЗАКОНИ ТА ПРИНЦИПИ КІБЕРНЕТИКИ • Закон необхідної різноманітності. • Принцип вибору рішень на підставі відбору і перетворення інформації • Принцип обов'язковості зворотного зв'язку • Принцип зовнішнього доповнення
 Основний порядок побудови системи управління об’єктами та системами 1. 2. 3. 4. 5. 6. 7. 8. Визначити межі об‘єкту та його тип (об‘єкт чи система). У випадку визначення системи, розбити її на об‘єкти і визначити структуру зв’язків поміж ними. Визначити перелік вхідних та вихідних факторів Розкласифікувати вхідні фактори на 3 типи. Зібрати числові дані про діяльність об’єкту чи системи за якомога більший період і розташувати їх у вигляді таблиці , в якій праворуч стоять колонки зі вхідними, а ліворуч – колонки з вихідними факторами. Провести статистичний аналіз даних з визначенням їх достовірності та достатності. Якщо перевірка показала недостатність, провести додаткове спостереження і доповнити таблицю. Визначитися з типом моделі, яка описуватиме дії об‘єкту чи системи Розрахувати числові коефіцієнти моделі та визначити її адекватність та прогнозуючі властивості. Розрахувати такі значення для факторів управління, які б дозволили отримати найкращі значення вихідних факторів.
Основний порядок побудови системи управління об’єктами та системами 1. 2. 3. 4. 5. 6. 7. 8. Визначити межі об‘єкту та його тип (об‘єкт чи система). У випадку визначення системи, розбити її на об‘єкти і визначити структуру зв’язків поміж ними. Визначити перелік вхідних та вихідних факторів Розкласифікувати вхідні фактори на 3 типи. Зібрати числові дані про діяльність об’єкту чи системи за якомога більший період і розташувати їх у вигляді таблиці , в якій праворуч стоять колонки зі вхідними, а ліворуч – колонки з вихідними факторами. Провести статистичний аналіз даних з визначенням їх достовірності та достатності. Якщо перевірка показала недостатність, провести додаткове спостереження і доповнити таблицю. Визначитися з типом моделі, яка описуватиме дії об‘єкту чи системи Розрахувати числові коефіцієнти моделі та визначити її адекватність та прогнозуючі властивості. Розрахувати такі значення для факторів управління, які б дозволили отримати найкращі значення вихідних факторів.
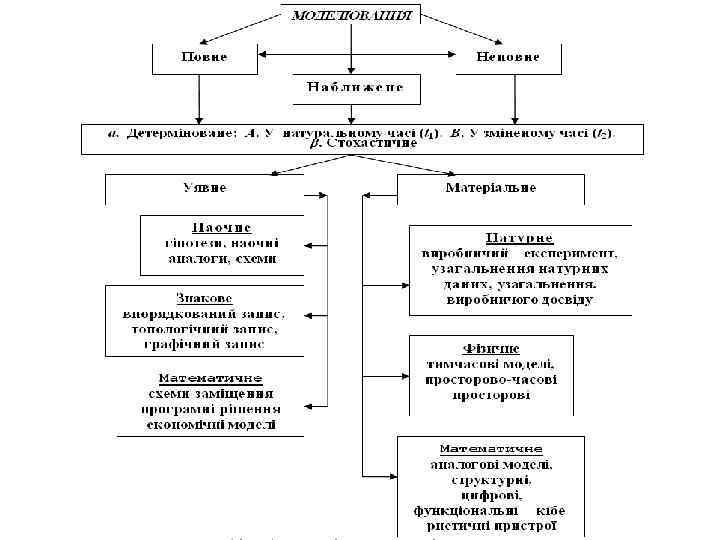
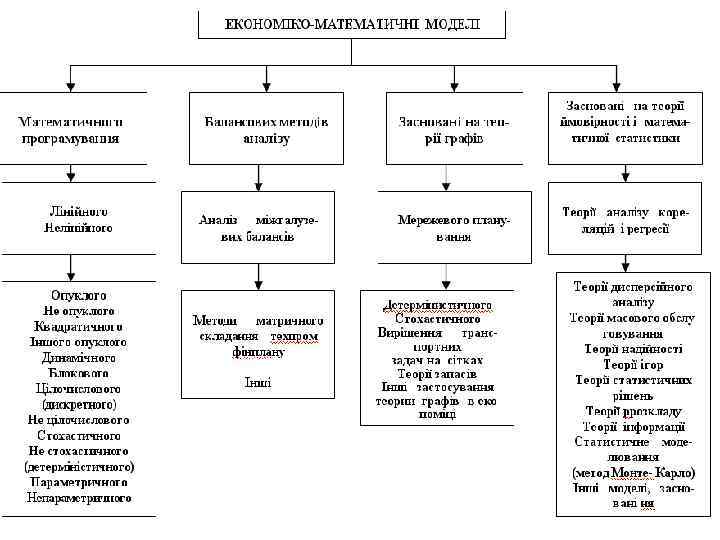
 Приклади кібернетичних моделей соціально-економічних систем Модель нарахування відсотків Моделі фінансових розрахунків Модел Кобба-Дугласа z=b 0 xb 1 yb 2 Динамічні моделі Пістунова-Чухлєбової схильності до банкрутства торгово-транспортних підприємств Дніпропетровської області
Приклади кібернетичних моделей соціально-економічних систем Модель нарахування відсотків Моделі фінансових розрахунків Модел Кобба-Дугласа z=b 0 xb 1 yb 2 Динамічні моделі Пістунова-Чухлєбової схильності до банкрутства торгово-транспортних підприємств Дніпропетровської області
 АНАЛІЗ Статистичний
АНАЛІЗ Статистичний
 Дисперсійний аналіз Аналіз експертних висновків За Спірменом За Кендалом
Дисперсійний аналіз Аналіз експертних висновків За Спірменом За Кендалом
 ε y 0(t) а") Аналіз запізнювання Типи інерційних процесів у соціальноекономічних системах І y(t) ε y 0(t) а б y 1(t) y T 1 T 2 T t
Аналіз запізнювання Типи інерційних процесів у соціальноекономічних системах І y(t) ε y 0(t) а б y 1(t) y T 1 T 2 T t
 Спектральний аналіз Ряд Фур'є — в математиці — спосіб представлення довільної складної функції сумою простіших. В загальному випадку кількість таких функцій може бути нескінченною, при цьому чим більше таких функцій враховується при розрахунку, тим вищою стає кінцева точність представлення даної функції. В більшості випадків в якості найпростіших використовуються тригонометричні функції синуса і косинуса. В цьому випадку ряд Фур'є називаеться тригонометричним, а обчислення такого ряду часто називаютьрозкладом на гармоніки.
Спектральний аналіз Ряд Фур'є — в математиці — спосіб представлення довільної складної функції сумою простіших. В загальному випадку кількість таких функцій може бути нескінченною, при цьому чим більше таких функцій враховується при розрахунку, тим вищою стає кінцева точність представлення даної функції. В більшості випадків в якості найпростіших використовуються тригонометричні функції синуса і косинуса. В цьому випадку ряд Фур'є називаеться тригонометричним, а обчислення такого ряду часто називаютьрозкладом на гармоніки.
 Тригонометричним рядом Фур'є називають ряд виду y = Сталі числа називаються коефіцієнтами тригонометричного ряду і знаходяться як Збіжність ряду Фур’є y y x
Тригонометричним рядом Фур'є називають ряд виду y = Сталі числа називаються коефіцієнтами тригонометричного ряду і знаходяться як Збіжність ряду Фур’є y y x
 ПОБУДОВА АМПЛІТУДНО-ЧАСТОТНОЇ ХАРАКТЕРИСТИКИ ПРОЦЕСУ ПАКЕТОМ STATISTICA
ПОБУДОВА АМПЛІТУДНО-ЧАСТОТНОЇ ХАРАКТЕРИСТИКИ ПРОЦЕСУ ПАКЕТОМ STATISTICA
 Кластерний аналіз Відстані між двома об'єктами Представлення трьох об’єктів, як точок на площині
Кластерний аналіз Відстані між двома об'єктами Представлення трьох об’єктів, як точок на площині
 Кластеризація повним перебором об'єктів Об'єкти 1 2 3 4 5 1 0 0 0 1 2 1 0 0 1 3 0 0 0 1 1 2 4 0 0 1 5 0 0 0 Сума по стов пцям 1 1 1 5 1 2 3 4 1 0 2 0, 89 3 0, 41 0, 86 4 0, 74 0, 87 0, 96 5 0, 46 0, 61 0, 66 0, 62 5 0, 89 0, 41 0, 74 0, 46 0 0, 86 0, 87 0, 61 0 0, 96 0, 66 0 0, 62 0 Сума по клас тера м Кла с т е р и
Кластеризація повним перебором об'єктів Об'єкти 1 2 3 4 5 1 0 0 0 1 2 1 0 0 1 3 0 0 0 1 1 2 4 0 0 1 5 0 0 0 Сума по стов пцям 1 1 1 5 1 2 3 4 1 0 2 0, 89 3 0, 41 0, 86 4 0, 74 0, 87 0, 96 5 0, 46 0, 61 0, 66 0, 62 5 0, 89 0, 41 0, 74 0, 46 0 0, 86 0, 87 0, 61 0 0, 96 0, 66 0 0, 62 0 Сума по клас тера м Кла с т е р и
 Синтез статистичних лінійних та квазілінійних моделей Можливі перетворення х1 х2, х1/ х2, х1 -х2, log х1 х2, Приклад нормування-денормування у = а 0 + а 1 x + а 2 x 2 Lnу = а 0 + а 1*Lnx 1 + а 2*Lnx 2
Синтез статистичних лінійних та квазілінійних моделей Можливі перетворення х1 х2, х1/ х2, х1 -х2, log х1 х2, Приклад нормування-денормування у = а 0 + а 1 x + а 2 x 2 Lnу = а 0 + а 1*Lnx 1 + а 2*Lnx 2
 Синтез авторегресійних моделей Синтез періодичних моделей
Синтез авторегресійних моделей Синтез періодичних моделей
 Приклад періодичної моделі
Приклад періодичної моделі
 Нейронні сітки Модель граничного нейрона Мак. Каллоха. Піттса Вид логістичної функції
Нейронні сітки Модель граничного нейрона Мак. Каллоха. Піттса Вид логістичної функції
 Алгоритм навчання перцептрону 1. Початкові ваги можуть бути будь-якими. Корекція провадиться пропорційно величині похідної по даній координаті. Похідна береться від функції активації. Підстроювання j ваги для i нейрона здійснюється за формулою , де j=1, 2, . . . , n - коефіцієнт навчання, підбирається евристично 2. Помилка при навчанні на k кроці: де di - очікуваний вихід 3. Загальна помилка при навчанні: де p - число прикладів у навчальній вибірці 4. Похідна від сигмоїди де p - число прикладів у навчальній вибірці. X 1 W 11 W 12 W 13 Θ 11 X 2 OUT 1 W 21 Σ OUT Σ Σ OUT 1 W 22 X 3 W 14 W 15 W 1 Θ 12 Θ 21
Алгоритм навчання перцептрону 1. Початкові ваги можуть бути будь-якими. Корекція провадиться пропорційно величині похідної по даній координаті. Похідна береться від функції активації. Підстроювання j ваги для i нейрона здійснюється за формулою , де j=1, 2, . . . , n - коефіцієнт навчання, підбирається евристично 2. Помилка при навчанні на k кроці: де di - очікуваний вихід 3. Загальна помилка при навчанні: де p - число прикладів у навчальній вибірці 4. Похідна від сигмоїди де p - число прикладів у навчальній вибірці. X 1 W 11 W 12 W 13 Θ 11 X 2 OUT 1 W 21 Σ OUT Σ Σ OUT 1 W 22 X 3 W 14 W 15 W 1 Θ 12 Θ 21
 Приклади нейронних сіток Загальний вигляд схеми перцептрона з одним нейроном та суматором на вході
Приклади нейронних сіток Загальний вигляд схеми перцептрона з одним нейроном та суматором на вході
 Схема двошарового перцептрона з трьома входами на кожному нейроні X 1 W 11 W 12 W 13 X 2 Θ 11 OUT 1 W 21 Σ OUT Σ Σ OUT 1 W 22 X 3 W 14 W 15 W 1 Θ 12 Θ 21
Схема двошарового перцептрона з трьома входами на кожному нейроні X 1 W 11 W 12 W 13 X 2 Θ 11 OUT 1 W 21 Σ OUT Σ Σ OUT 1 W 22 X 3 W 14 W 15 W 1 Θ 12 Θ 21
 ОЦІНКА ЯКОСТІ АПРОКСИМАЦІЇ ТА ПРОГНОЗУВАННЯ
ОЦІНКА ЯКОСТІ АПРОКСИМАЦІЇ ТА ПРОГНОЗУВАННЯ
 Оцінка адекватності апроксимації та якості прогнозування 1. Для перевірки адекватності апроксимації проводиться розрахунок вихідних значень математичної моделі, підставляючи в неї реальні вхідні значення, за якими ця модель була побудована. Для визначення якості прогнозування в модель підставляються ті значення вхідних факторів, які не було використано при розрахунках коефіцієнтів моделі. 2. Для кожної пари розрахованих у. Пі та реальних у. Рі значень розраховується критерій «хі-квадрат» за формулою 3. Визначається число ступенів свободи як r = n - 2. 4. Знаходиться теоретичне значення «хі-квадрат» за наперед визначеною довірчою ймовірністю. Ця довірча ймовірність має бути достатньо високою, щоб дослідник міг довіряти отриманим результатам (0, 8 -0, 99). Якщо це значення більше розрахованого, модель вважається адекватною з визначеною довірчою ймовірністю. В іншому випадку – модель не адекватна, тобто, погано описує процес. Якість прогнозування теж розуміється з цією довірчою ймовірністю.
Оцінка адекватності апроксимації та якості прогнозування 1. Для перевірки адекватності апроксимації проводиться розрахунок вихідних значень математичної моделі, підставляючи в неї реальні вхідні значення, за якими ця модель була побудована. Для визначення якості прогнозування в модель підставляються ті значення вхідних факторів, які не було використано при розрахунках коефіцієнтів моделі. 2. Для кожної пари розрахованих у. Пі та реальних у. Рі значень розраховується критерій «хі-квадрат» за формулою 3. Визначається число ступенів свободи як r = n - 2. 4. Знаходиться теоретичне значення «хі-квадрат» за наперед визначеною довірчою ймовірністю. Ця довірча ймовірність має бути достатньо високою, щоб дослідник міг довіряти отриманим результатам (0, 8 -0, 99). Якщо це значення більше розрахованого, модель вважається адекватною з визначеною довірчою ймовірністю. В іншому випадку – модель не адекватна, тобто, погано описує процес. Якість прогнозування теж розуміється з цією довірчою ймовірністю.
 Синтез динамічних моделей Просте запізнювання Часто вживана модель Дискретні моделі запізнювання
Синтез динамічних моделей Просте запізнювання Часто вживана модель Дискретні моделі запізнювання
>0}. Типи функцій приналежності Трикутна Трапецевидна в") Нечіткі моделі Функція приналежності A = {x/m. A(x)>0}. Типи функцій приналежності Трикутна Трапецевидна в інших випадках Гаусіана Кругова
Нечіткі моделі Функція приналежності A = {x/m. A(x)>0}. Типи функцій приналежності Трикутна Трапецевидна в інших випадках Гаусіана Кругова
 Приклад вигляду функцій приналежності Трикутна Трапецевидна Гаусіана Структура нечіткої системи управління ЯКЩО x 1 це A 1. І. x 2 це A 2, ТО у це B.
Приклад вигляду функцій приналежності Трикутна Трапецевидна Гаусіана Структура нечіткої системи управління ЯКЩО x 1 це A 1. І. x 2 це A 2, ТО у це B.
 ТЕОРІЯ ОПТИМАЛЬНИХ СИСТЕМ ТА ЇЇ ЗАСТОСУВАННЯ В ОПТИМІЗАЦІЇ ПРОЦЕСІВ УПРАВЛІННЯ В ЕКОНОМІЦІ
ТЕОРІЯ ОПТИМАЛЬНИХ СИСТЕМ ТА ЇЇ ЗАСТОСУВАННЯ В ОПТИМІЗАЦІЇ ПРОЦЕСІВ УПРАВЛІННЯ В ЕКОНОМІЦІ
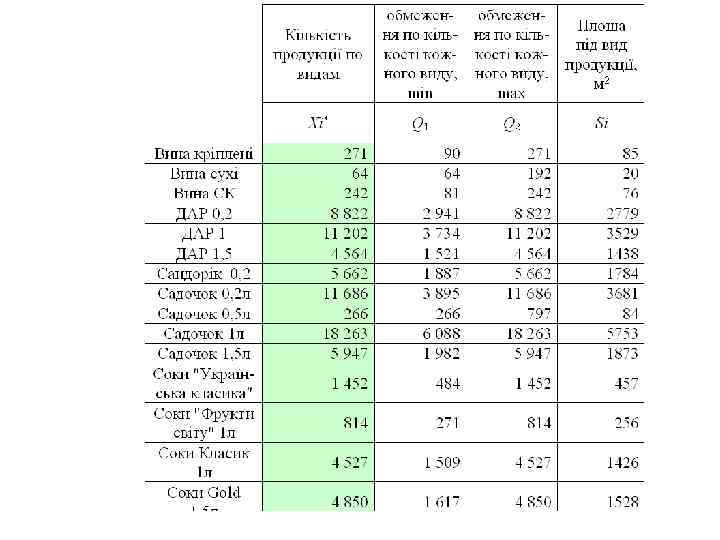
 ПРИКЛАД ПОБУДОВИ ОПТИМІЗАЦІЙНОЇ ЗАДАЧІ Ціна товарної продукції: телевізор – 180 у. о. , відеомагнітофон – 260 у. о. , музичний центр - 420 у. о. Собівартість складається з витрат на оренду площі – 4000 у. о. , витрат на комплектуючі – 100, 170, 315 відповідно на випуск одного телевізора, відеомагнітофона та музичного центру; інших витрат – 4500 у. о. Необхідна зарплата інженерів складає 400, директора - 600, робітників на конвеєрі - 350. Для підприємства нашого масштабу необхідно 3 директори незалежно від випуску і 1 на кожні 150 одиниць продукції. Необхідно 1 -2 інженери на кожні 150 одиниць випуску продукції. Фонд заробітної платні, обмежений через податкові проблеми у 260, 5 млн. у. о. Всього в наявності є 230 місць, кожне з яких займає 7, 4 квадратних метрів, враховуючи проходи до них. Необхідно також розвернути мінімум 10 робочих місць для інженерів, кожне з яких займає 8, 5 квадратних метрів. Загальна площа виробничих приміщень становить 2000 квадратних метрів. Площа, необхідна для розміщення готової продукції кожного виду становить: 0, 3 - для телевізорів, що випускаються за місяць; 0, 35 - для відеомагнітофонів, що випускаються за місяць; 0, 4 – для музичних центрів, що випускаються за місяць.
ПРИКЛАД ПОБУДОВИ ОПТИМІЗАЦІЙНОЇ ЗАДАЧІ Ціна товарної продукції: телевізор – 180 у. о. , відеомагнітофон – 260 у. о. , музичний центр - 420 у. о. Собівартість складається з витрат на оренду площі – 4000 у. о. , витрат на комплектуючі – 100, 170, 315 відповідно на випуск одного телевізора, відеомагнітофона та музичного центру; інших витрат – 4500 у. о. Необхідна зарплата інженерів складає 400, директора - 600, робітників на конвеєрі - 350. Для підприємства нашого масштабу необхідно 3 директори незалежно від випуску і 1 на кожні 150 одиниць продукції. Необхідно 1 -2 інженери на кожні 150 одиниць випуску продукції. Фонд заробітної платні, обмежений через податкові проблеми у 260, 5 млн. у. о. Всього в наявності є 230 місць, кожне з яких займає 7, 4 квадратних метрів, враховуючи проходи до них. Необхідно також розвернути мінімум 10 робочих місць для інженерів, кожне з яких займає 8, 5 квадратних метрів. Загальна площа виробничих приміщень становить 2000 квадратних метрів. Площа, необхідна для розміщення готової продукції кожного виду становить: 0, 3 - для телевізорів, що випускаються за місяць; 0, 35 - для відеомагнітофонів, що випускаються за місяць; 0, 4 – для музичних центрів, що випускаються за місяць.
 Оптимізація типова постановка задачі
Оптимізація типова постановка задачі
 ПРИКЛАД ВИРІШЕННЯ НЕЛІНІЙНОЇ ЗАДАЧІ МАТЕМАТИЧНОГО ПРОГРАМУВАННЯ ФУНКЦІОНАЛ Обмеження - по площі складу і висоті стосу ящиків - на верхні та нижні межі товарообігу - на тип змінних
ПРИКЛАД ВИРІШЕННЯ НЕЛІНІЙНОЇ ЗАДАЧІ МАТЕМАТИЧНОГО ПРОГРАМУВАННЯ ФУНКЦІОНАЛ Обмеження - по площі складу і висоті стосу ящиків - на верхні та нижні межі товарообігу - на тип змінних
 Частотний аналіз споживання продукції Коефіціенти експоненційного сгладжування функцій розподілу попиту на окремі види товару. А № в хі мин хі макс Теорети чна кількіст ь діапазон і Кро к Розрахунок правої межі інтервалів 1 Вина кріплені 0, 25 -0, 74 7 328 29 40 47 88 128 168 208 248 288 2 Вина сухі 0, 38 -1, 27 29 406 34 47 76 124 171 218 265 312 359 3 Вина СК 0, 08 -0, 012 0 656 60 82 82 164 246 328 410 492 574 4 ДАР 0, 2 0, 83 -6, 6 2520 10642 740 1015 3535 4550 5566 6581 7596 8611 9626 5 ДАР 1 1, 24 -10, 57 4820 11337 593 815 5635 6449 7264 8079 8893 9708 1052 3 6 ДАР 1, 5 1 -7, 55 1809 5028 293 402 2211 2613 3016 3418 3821 4223 4626 7 Сандорік 0, 2 0, 83 -6, 29 1471 5044 325 447 1918 2364 2811 3257 3704 4151 4597 8 Садочок 0, 2 л 0, 58 -4, 7 3415 11575 743 1020 4435 5455 6475 7495 8515 9535 1055 5 9 Садочок 0, 5 л 2, 38 -16, 9 0 1812 165 226 453 679 906 1132 1359 1585 10 Садочок 1 л 0, 93 -8, 21 9507 31597 2012 2761 12268 15029 17790 20552 23313 26074 2883 5 11 Садочок 1, 5 л 0, 65 -4, 81 1031 5200 380 521 1552 2074 2595 3116 3637 4158 4679 12 Соки "Українська класика"1 л -0, 73 -4, 89 0 3231 294 404 808 1212 1615 2019 2423 2827 13 Соки "Фрукти світу" 1 л 0, 19 -6, 79 0 994 91 124 248 373 497 621 745 870 14 Соки Класик 1 л 1, 35 -10, 31 3066 6415 305 419 3485 3903 4322 4740 5159 5578 5996 1000 3981 271 373 1745 2118 2490 2863 3236 3608 15 Соки Gold 1, 5 л 0, 77 -5, 72 16 Соки Gold 1 л 1, 12 -10, 07 5418 13778 761 1045 6463 7508 8553 9598 10643 11688 1273 3 17 Соки Gold 0, 25 л 1, 02 -7, 88 2904 8517 511 702 3606 4308 5009 5711 6412 7114 7816 18 Напої 0, 22 -0, 49 0 747 68 93 93 187 280 373 467 560 653 0 157 14 20 20 39 59 79 98 118 138 19 Напої 1 0, 24 -0, 61
Частотний аналіз споживання продукції Коефіціенти експоненційного сгладжування функцій розподілу попиту на окремі види товару. А № в хі мин хі макс Теорети чна кількіст ь діапазон і Кро к Розрахунок правої межі інтервалів 1 Вина кріплені 0, 25 -0, 74 7 328 29 40 47 88 128 168 208 248 288 2 Вина сухі 0, 38 -1, 27 29 406 34 47 76 124 171 218 265 312 359 3 Вина СК 0, 08 -0, 012 0 656 60 82 82 164 246 328 410 492 574 4 ДАР 0, 2 0, 83 -6, 6 2520 10642 740 1015 3535 4550 5566 6581 7596 8611 9626 5 ДАР 1 1, 24 -10, 57 4820 11337 593 815 5635 6449 7264 8079 8893 9708 1052 3 6 ДАР 1, 5 1 -7, 55 1809 5028 293 402 2211 2613 3016 3418 3821 4223 4626 7 Сандорік 0, 2 0, 83 -6, 29 1471 5044 325 447 1918 2364 2811 3257 3704 4151 4597 8 Садочок 0, 2 л 0, 58 -4, 7 3415 11575 743 1020 4435 5455 6475 7495 8515 9535 1055 5 9 Садочок 0, 5 л 2, 38 -16, 9 0 1812 165 226 453 679 906 1132 1359 1585 10 Садочок 1 л 0, 93 -8, 21 9507 31597 2012 2761 12268 15029 17790 20552 23313 26074 2883 5 11 Садочок 1, 5 л 0, 65 -4, 81 1031 5200 380 521 1552 2074 2595 3116 3637 4158 4679 12 Соки "Українська класика"1 л -0, 73 -4, 89 0 3231 294 404 808 1212 1615 2019 2423 2827 13 Соки "Фрукти світу" 1 л 0, 19 -6, 79 0 994 91 124 248 373 497 621 745 870 14 Соки Класик 1 л 1, 35 -10, 31 3066 6415 305 419 3485 3903 4322 4740 5159 5578 5996 1000 3981 271 373 1745 2118 2490 2863 3236 3608 15 Соки Gold 1, 5 л 0, 77 -5, 72 16 Соки Gold 1 л 1, 12 -10, 07 5418 13778 761 1045 6463 7508 8553 9598 10643 11688 1273 3 17 Соки Gold 0, 25 л 1, 02 -7, 88 2904 8517 511 702 3606 4308 5009 5711 6412 7114 7816 18 Напої 0, 22 -0, 49 0 747 68 93 93 187 280 373 467 560 653 0 157 14 20 20 39 59 79 98 118 138 19 Напої 1 0, 24 -0, 61
 Числові методи знайдення оптимального рішення статистичних моделей Метод Ньютона Геометрична інтерпретація метода Ньютона
Числові методи знайдення оптимального рішення статистичних моделей Метод Ньютона Геометрична інтерпретація метода Ньютона
 Метод зв'язаних градієнтів Формально порядок розрахунку наступний: 1. Задаються початковим наближенням і погрішністю: 2. Розраховують початковий напрям: 3. Якщо або то , то розрахунок закінчено, потрібна точність досягнута. 4. Інакше якщо то і перехід до п. 3; 5. інакше і перехід до п. 2.
Метод зв'язаних градієнтів Формально порядок розрахунку наступний: 1. Задаються початковим наближенням і погрішністю: 2. Розраховують початковий напрям: 3. Якщо або то , то розрахунок закінчено, потрібна точність досягнута. 4. Інакше якщо то і перехід до п. 3; 5. інакше і перехід до п. 2.
 ТРАНСПОРТНА ЗАДАЧА
ТРАНСПОРТНА ЗАДАЧА
,") Транспортна задача Σ Хij = Bi , (j=1, 2, … n – кількість постачальників), Σ Хij = Ai , (i= 1, 2, … m – кількість споживачів);
Транспортна задача Σ Хij = Bi , (j=1, 2, … n – кількість постачальників), Σ Хij = Ai , (i= 1, 2, … m – кількість споживачів);
 Критерій оптимізації матричної задачі Σ Σ Сij Хij → min, Мережна транспортна задача Σ Σ Сrs Хrs → min Σ Xks – Σ Xkr = Rk; Хrs < drs Інші критерії оптимізації Езав + Епер + Еn + (Кпс + Cгр), Езав + Епер + Енез + Еn + (Кпс + Кпост + Cгр)
Критерій оптимізації матричної задачі Σ Σ Сij Хij → min, Мережна транспортна задача Σ Σ Сrs Хrs → min Σ Xks – Σ Xkr = Rk; Хrs < drs Інші критерії оптимізації Езав + Епер + Еn + (Кпс + Cгр), Езав + Епер + Енез + Еn + (Кпс + Кпост + Cгр)
 ОПТИМАЛЬНИЙ ПЕРЕРОЗПОДІЛ ВИРОБНИЧИХ ОБОВ’ЯЗКІВ СПІВРОБІТНИКІВ ОБСЛУГОВУЮЧОГО ПІДПРИЄМСТВА
ОПТИМАЛЬНИЙ ПЕРЕРОЗПОДІЛ ВИРОБНИЧИХ ОБОВ’ЯЗКІВ СПІВРОБІТНИКІВ ОБСЛУГОВУЮЧОГО ПІДПРИЄМСТВА
 Багатокритеріальні задачі Формальне визначення -оптимальності рішення х, записується як вимога про відсутність такого рішення х Dx, при якому б були виконані умови і хоча б одне з них – строго (зі знаком >).
Багатокритеріальні задачі Формальне визначення -оптимальності рішення х, записується як вимога про відсутність такого рішення х Dx, при якому б були виконані умови і хоча б одне з них – строго (зі знаком >).
 Зведення до задачі математичного програмування Метод гарантованого результату
Зведення до задачі математичного програмування Метод гарантованого результату
 Метод згортки часткових критеріїв
Метод згортки часткових критеріїв
 ТЕОРІЯ ІГОР Антагоністична гра
ТЕОРІЯ ІГОР Антагоністична гра
 гра") Кооперативна (біматрична) гра
Кооперативна (біматрична) гра
 Ігри з природою Прийняття рішень при відомих ймовірностях стану природи
Ігри з природою Прийняття рішень при відомих ймовірностях стану природи
 Ігри з природою в умовах повної невизначеності Критерії максимакса Максимінний критерій Вальда Критерій мінімаксного ризику Севіджа Критерій песимізму-onmимізму Гурвіца
Ігри з природою в умовах повної невизначеності Критерії максимакса Максимінний критерій Вальда Критерій мінімаксного ризику Севіджа Критерій песимізму-onmимізму Гурвіца
 Оптимізація управління соціальноекономічної системи, заданої нечіткою моделлю
Оптимізація управління соціальноекономічної системи, заданої нечіткою моделлю
 Нечіткий вивід за Мамдані
Нечіткий вивід за Мамдані