л.р. 1 движения.pptx
- Количество слайдов: 14



Департамент образования города Москвы Государственное образовательное учреждение Среднего профессионального образования Полиграфический колледж № 56 Тема: «Оптимизация рабочих движений и органов управления» Исполнитель: Конычева Адель Студент (ка) 2 курса 2 Дн группы

Система «человек - машина» Система «человек – машина» – одно из основных понятий эргономики и инженерной психологии. Система «человек – машина» – это система, включающая в себя человека – оператора СЧМ, машину, посредством которой он осуществляет трудовую деятельность, и среду на рабочем месте.
; • подсистемы, которая представлена человекомоператором СЧМ.")
Две подсистемы: • подсистемы, включающей технические звенья (машина); • подсистемы, которая представлена человекомоператором СЧМ.

Человек, выполняющий функции управления в системе «человек-машина» , называется оператором. В эргономике под человекомоператором понимается человек, осуществляющий трудовую деятельность, основу которой составляет взаимодействие с объектом воздействия, машиной и средой на рабочем месте при использовании информационной модели и органов управления.
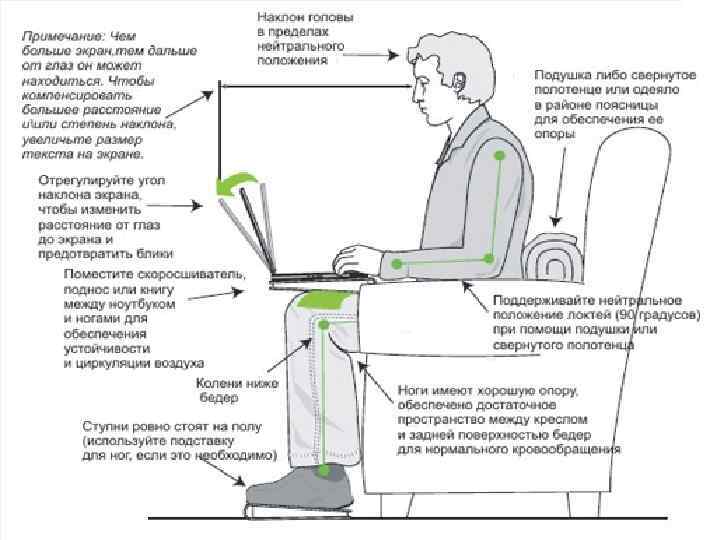

Оптимизация рабочих движений На человека следует возлагать выполнение функций по: • распознаванию ситуации в целом по ее многим сложно связанным характеристикам, а также при неполной информации о ней; • осуществлению функций индуктивного вывода, т. е. обобщению отдельных фактов в единую систему; • решению задач, в которых отсутствует единый алгоритм или нет четко определенных правил обработки информации; • решению задач, в которых требуется гибкость и приспособляемость к изменяющимся условиям, особенно задач, появление которых заранее трудно предвидеть; • решению задач с высокой ответственностью в случае возникновения ошибки.

Машине следует поручать: • выполнение всех видов математических расчетов; • выполнение однообразных, постоянно повторяющихся операций, реализуемых по заданному алгоритму; • хранение и динамическое представление больших объемов однородной информации; • решение задач, требующих дедуктивного вывода; • выполнение действий, требующих высокой скорости реакции на команду.

В зависимости от технического назначения «человек-машина» системы различают: • системы управления движущимися объектами с управлением как с объекта, так и извне; • системы управления энергетическими установками; • системы управления технологическими процессами циклического типа; • системы наблюдения за обстановкой и обнаружения объектов; • системы диспетчерского типа, управляющие транспортными средствами, распределением энергии и т. п.

Рабочие движения оператора Любая профессиональная деятельность осуществляется в форме моторных действий руками. Дистальные части руки не ограничены в формировании различных траекторий перемещений в пространстве. Кисть по отношению к плечевому поясу имеет семь степеней свободы, по отношению к грудной клетке - 16 степеней свободы, а по отношению к опоре (стопам) около 30. Это обеспечивает «безграничную» свободу перемещений дистальных частей руки.

Любое управляющее действие человека состоит из «микродвижений» , корректируемых и осуществляемых под контролем центральных механизмов регуляции мозга. Действие не воспроизводится, а строится в процессе своего выполнения, поэтому его нельзя повторить в пространстве, а можно лишь создать новое действие, близкое по целям и структуре ранее выполненному.

Движения, возникающие при решении двигательной задачи, разделяют на три группы: • рабочие или исполнительные, с помощью которых осуществляется воздействие на орган управления; • гностические, направленные на познание объекта. К ним относятся осязательные, ощупывающие, измерительные и другие движения; • приспособительные, состоящие из установочных, уравновешивающих и других движений.

Различают органы управления: • по назначению: для ввода информации, для установки режимов; • по характеру движений: не требующие движений включения, требующие повторяющихся, дозированных движений; • по характеру использования оперативные, используемые периодически или эпизодически; • по конструктивному исполнению: кнопки, тумблеры, переключатели, штурвалы, манипуляторы; • по значению: главные, вспомогательные.

Используемый материал: 1. Климов Е. А. Введение в психологию труда / Е. А. Климов. - М. : 1998 2. Сергеев С. Ф. Инженерная психология и эргономика: Учебное пособие. М. : НИИ школьных технологий, 2008. - 176 с. 3. Толочек В. А. Современная психология труда: Учебное пособие. / В. А. Толочек. - СПб. : Питер, 2005 4. http: //www. myword. ru

Спасибо за внимание!
л.р. 1 движения.pptx