

7dffaa75f2e36ddea8befdcaddd7eb2b.ppt
- Количество слайдов: 19
 Computer Vision and Data Mining Research Projects Longin Jan Latecki Computer and Information Sciences Dept. Temple University latecki@temple. edu
Computer Vision and Data Mining Research Projects Longin Jan Latecki Computer and Information Sciences Dept. Temple University latecki@temple. edu
 Research Projects • Object detection and recognition in images • Improving ranking of search queries • Motion and activity detection in videos • Merging laser range maps of multiple robots
Research Projects • Object detection and recognition in images • Improving ranking of search queries • Motion and activity detection in videos • Merging laser range maps of multiple robots
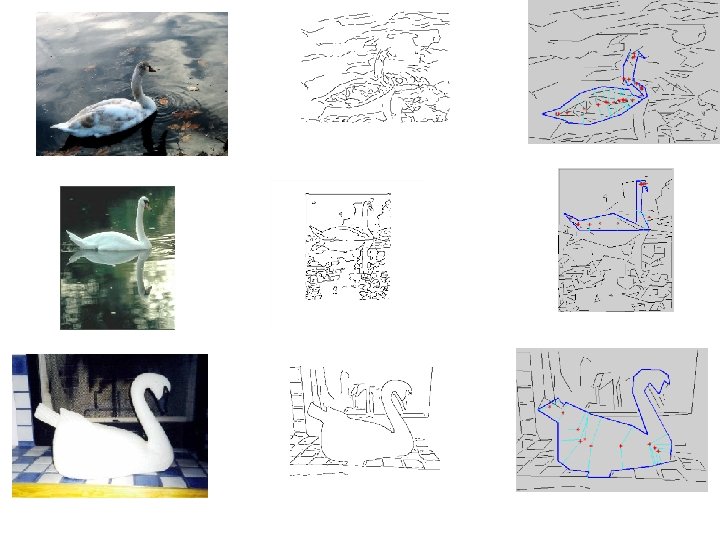
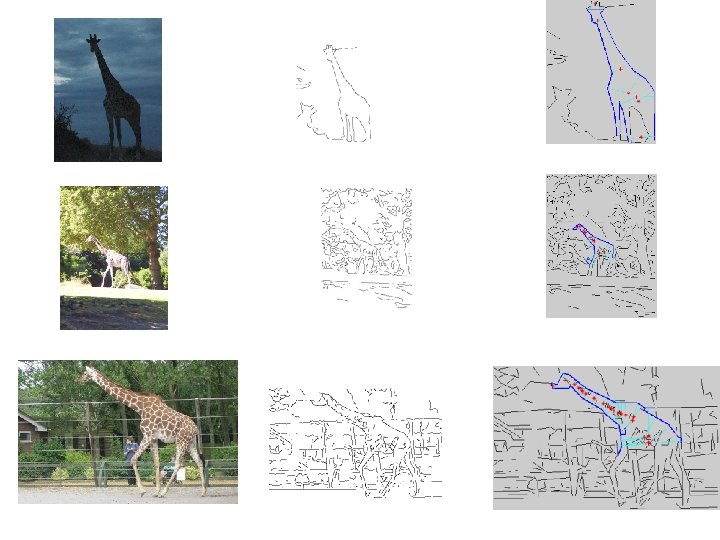
 Object detection and recognition based on contour parts • Often only parts of objects are visible in images • We can detect and recognize such objects in edge images by performing contour grouping with shape similarity Edge image Detected object
Object detection and recognition based on contour parts • Often only parts of objects are visible in images • We can detect and recognize such objects in edge images by performing contour grouping with shape similarity Edge image Detected object
 Algorithmic overview
Algorithmic overview
 Methodology • Probabilistic approaches are needed to address noisy sensor information in robot perception. • We use Rao-Blackwellized particle filtering that has been successfully applied to solve the robot mapping problem (SLAM). • We use medial axis (skeleton) as our shape representation. • Supported by DOE, NNSA, NA-22 • NSF, Computer Vision Program
Methodology • Probabilistic approaches are needed to address noisy sensor information in robot perception. • We use Rao-Blackwellized particle filtering that has been successfully applied to solve the robot mapping problem (SLAM). • We use medial axis (skeleton) as our shape representation. • Supported by DOE, NNSA, NA-22 • NSF, Computer Vision Program
 Sample evolution of particles Iteration 2 Iteration 14 Iteration 10 Iteration 18
Sample evolution of particles Iteration 2 Iteration 14 Iteration 10 Iteration 18
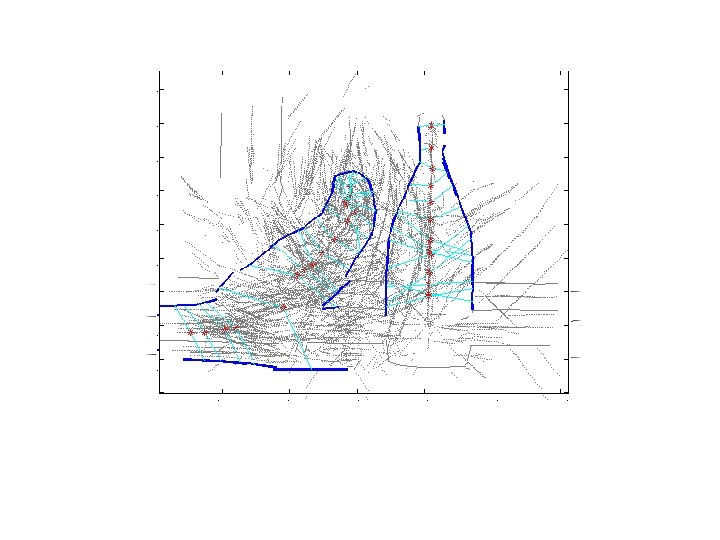
 Experimental results Bottle model Swan model Reference models Bird model
Experimental results Bottle model Swan model Reference models Bird model

 Applications: Analysis of aerial and satellite images, in particular object and change detection Supported by LANL, RADIUS: Rapid Automated Decomposition of Images for Ubiquitous Sensing, PI: Lakshman Prasad, LANL
Applications: Analysis of aerial and satellite images, in particular object and change detection Supported by LANL, RADIUS: Rapid Automated Decomposition of Images for Ubiquitous Sensing, PI: Lakshman Prasad, LANL
 the original aerial image detected parts of contours detected structures of interest at three different scales (in maroon).
the original aerial image detected parts of contours detected structures of interest at three different scales (in maroon).
 Motion and activity detection in videos Object and activity detection results Videos are obtained from the Temple University Police video surveillance system. Methodology: We use PCA to learn local background textures, and detect motion by analysis of texture trajectories. Many Video Surveillance Applications, e. g. , : Detection of moving objects and detection of abandon objects, e. g. , around power plants
Motion and activity detection in videos Object and activity detection results Videos are obtained from the Temple University Police video surveillance system. Methodology: We use PCA to learn local background textures, and detect motion by analysis of texture trajectories. Many Video Surveillance Applications, e. g. , : Detection of moving objects and detection of abandon objects, e. g. , around power plants
 Human detection in infrared images and videos
Human detection in infrared images and videos
 Improving ranking for similarity queries original improved query original improved
Improving ranking for similarity queries original improved query original improved
 Improving ranking in face profile retrieval Original retrieval query Improved retrieval Methodology: We use semi-supervised manifold learning to learn new distances in the manifold spanned by the training data set. Further applications: This methods makes it possible to improve ranking of any queries from images through text to concepts.
Improving ranking in face profile retrieval Original retrieval query Improved retrieval Methodology: We use semi-supervised manifold learning to learn new distances in the manifold spanned by the training data set. Further applications: This methods makes it possible to improve ranking of any queries from images through text to concepts.
 Prior maps of multiple robots Mergingbased on motion model • Our motion model is based on structure registration process between local maps which results in multi-modal prior. Prior in odometry based motion model Prior in our structure registration based motion model
Prior maps of multiple robots Mergingbased on motion model • Our motion model is based on structure registration process between local maps which results in multi-modal prior. Prior in odometry based motion model Prior in our structure registration based motion model
 Experimental results Dataset: NIST Maze data set Merged global map Sample individual local maps
Experimental results Dataset: NIST Maze data set Merged global map Sample individual local maps