

Студентам -2.ppt
- Количество слайдов: 25
 Цикловое управление Исходное положение Целевое положение Pm P 0
Цикловое управление Исходное положение Целевое положение Pm P 0
 Позиционное управление Промежуточные точки Исходное положение P 0 P 1 P 2 P 3 Целевое положение Pm
Позиционное управление Промежуточные точки Исходное положение P 0 P 1 P 2 P 3 Целевое положение Pm
 загрузка технологического оборудования (REIS Robot)") Позиционное управление: роботизированная точечная сварка (COMAU Robot) загрузка технологического оборудования (REIS Robot)
Позиционное управление: роботизированная точечная сварка (COMAU Robot) загрузка технологического оборудования (REIS Robot)
 Контурное управление P 0 P 1 P 2 P 3 Pm - программная траектория V(t) – контурная скорость V P 0 P 1 P 2 P 3 Pm
Контурное управление P 0 P 1 P 2 P 3 Pm - программная траектория V(t) – контурная скорость V P 0 P 1 P 2 P 3 Pm
 лазерная резка (REIS Robot)") Контурное управление : роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)
Контурное управление : роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)
") Адаптивное управление: Робототехнологический комплекс (МГТУ Станкин - Будапештский ТУ)
Адаптивное управление: Робототехнологический комплекс (МГТУ Станкин - Будапештский ТУ)
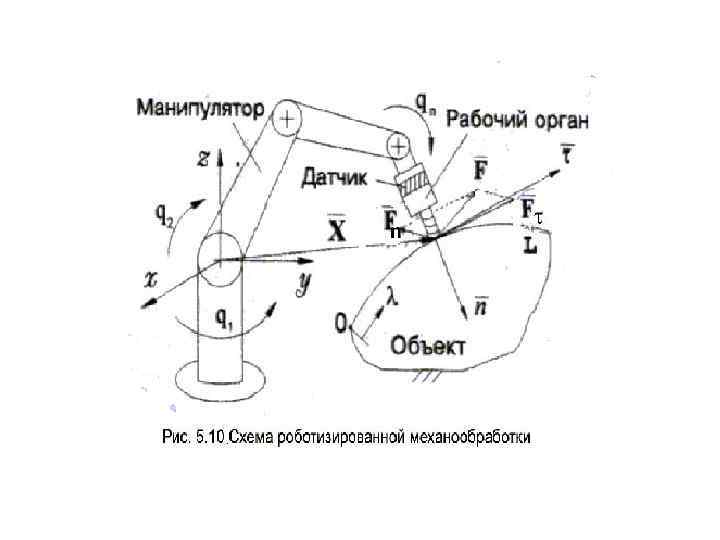
") Адаптивное управление (на основе информации о возмущающем воздействии)
Адаптивное управление (на основе информации о возмущающем воздействии)
 Конструкция силомоментного датчика С. А. Воротников Информационные устройства робототехнических систем, Изд-во МГТУ им. Баумана, 2005
Конструкция силомоментного датчика С. А. Воротников Информационные устройства робототехнических систем, Изд-во МГТУ им. Баумана, 2005
") Основные части нервной клетки (нейрона)
Основные части нервной клетки (нейрона)
 Структура нервной системы
Структура нервной системы
 Структура нейронной сети ANNs are taught by system developer at concrete cases. While teaching the developer gives information on inputs and corresponding desired outputs. Special tuning programme automatically selects weight coefficients the way to get correspondence. The learning is repeated at all known examples accumulating existing experience. This way the tuned net is ready for solution of new tasks for other combinations of inputs. The main specifics of ANN method is in the fact that developer doesn't need to programme clear task solution algorithm. He only needs to dive the input and output data for teaching.
Структура нейронной сети ANNs are taught by system developer at concrete cases. While teaching the developer gives information on inputs and corresponding desired outputs. Special tuning programme automatically selects weight coefficients the way to get correspondence. The learning is repeated at all known examples accumulating existing experience. This way the tuned net is ready for solution of new tasks for other combinations of inputs. The main specifics of ANN method is in the fact that developer doesn't need to programme clear task solution algorithm. He only needs to dive the input and output data for teaching.
 Обучение нейронной сети
Обучение нейронной сети
 Применение нейронной сети
Применение нейронной сети
 РАЗРАБОТКА ЭКСПЕРИМЕНТАЛЬНОГО ОБРАЗЦА МОБИЛЬНОГО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА Видео!
РАЗРАБОТКА ЭКСПЕРИМЕНТАЛЬНОГО ОБРАЗЦА МОБИЛЬНОГО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА Видео!
 Пример y P q 1= r q 2 x
Пример y P q 1= r q 2 x
 Прямая задача о скорости многозвенного механизма z P V Ω x y
Прямая задача о скорости многозвенного механизма z P V Ω x y
 Погрешность позиционирования z P Δ Δmax A y x
Погрешность позиционирования z P Δ Δmax A y x
 Погрешность отработки траектории z δ max G L y x
Погрешность отработки траектории z δ max G L y x
 Прямая задача об усилии многозвенного механизма z P F M x y
Прямая задача об усилии многозвенного механизма z P F M x y
 Командное управление
Командное управление
 Копирующее управление
Копирующее управление
 Копирующее управление
Копирующее управление
 Полуавтоматическое управление
Полуавтоматическое управление
 Полуавтоматическое управление
Полуавтоматическое управление