Л14. Цифровая обработка сигналов.ppt
- Количество слайдов: 27



Цифровая обработка сигналов

Основные компоненты микропроцессорной системы управления

Цели обработки сигналов 1. Извлечение информации о сигнале (амплитуда, фаза, частота, спектральные составляющие, временные соотношения) 2. Преобразование формата сигнала (телефония с разделением каналов FDMA, TDMA, CDMA) 3. Сжатие данных (модемы, сотовые телефоны, телевидение HDTV, сжатие MPEG) 4. Формирование сигналов обратной связи (управление промышленными процессами) 5. Выделение сигнала из шума (фильтрация, автокорреляция, свертка) 6. Выделение и сохранение сигнала в цифровом виде для последующей обработки (например, БПФ)

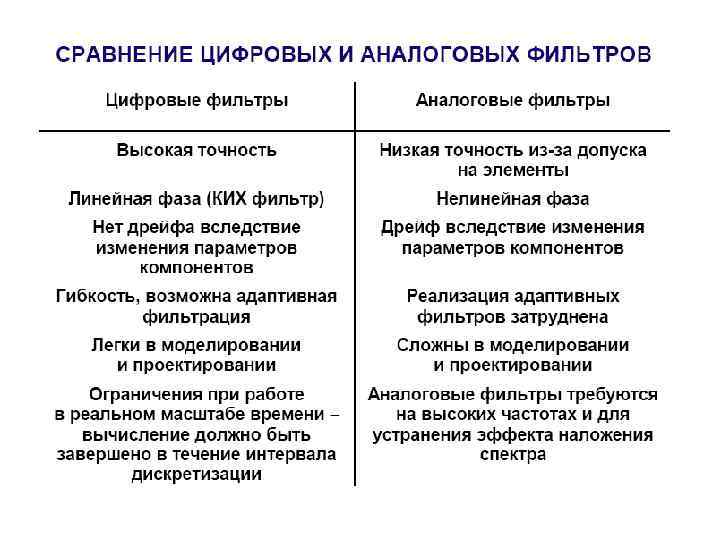
Сравнение аналоговой и цифровой обработки сигналов Решение задачи обработки сигналов состоит в выборе надлежащей комбинации аналоговых и цифровых методов. Невозможно обработать физические аналоговые сигналы, используя только цифровые методы, так как большинство датчиков являются аналоговыми устройствами. Некоторые виды сигналов требуют наличия цепей нормализации для дальнейшей обработки сигналов как аналоговым так и цифровым методом. Цепи нормализации сигнала – это аналоговые процессоры, выполняющие такие функции как: 1. усиление, накопление (в измерительных и предварительных (буферных) усилителях), 2. обнаружение сигнала на фоне шума (высокоточными усилителями синфазного сигнала, эквалайзерами и линейными приемниками), 3. динамическое сжатие диапазона (логарифмическими усилителями, логарифмическими ЦАП и усилителями с программируемым коэффициентом усиления), 4. фильтрация (пассивная или активная).

Рис. 2. Виды измерительных сигналов Сигналы – это различные физические величины, различные единицы измерений, различные масштабы переменных

Рис. 3. Способы обработки сигналов Два варианта обработки сигналов: 1. Чисто аналоговый подход. 2. Реализация цифровой обработки сигналов (ЦОС). Как только выбрана ЦОС технология, следующим решением должно быть определение местоположения АЦП в тракте обработки сигнала.
, независимо от архитектуры, проходит при")
Дискретизация сигнала в АЦП (с интегрированным устройством выборкихранения УВХ), независимо от архитектуры, проходит при наличии шумов и искажений сигнала Широкополосному аналоговому входному буферу присущи шум, нелинейность и конечная (ограниченная) ширина полосы пропускания. 1. УВХ вносит дальнейшую нелинейность, ограничение полосы и дрожание апертуры. 2. Квантующая часть АЦП вносит шум квантования, интегральную и дифференциальную нелинейности. Предполагается, что сигналы с последовательных выходов АЦП загружаются в буферную память длиной М. 3. Допускается, что арифметические операции БПФ не вносят никаких существенных погрешностей в АЦП.
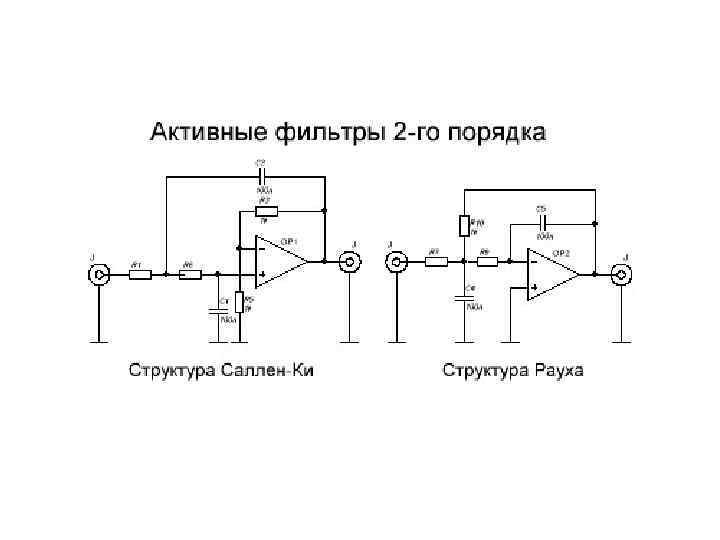

Частота среза обоих фильтров равна 1 к. Гц. Пример. Аналоговый фильтр реализованный в виде фильтра Чебышева первого рода 6 -го порядка (характеризуется неравномерностью коэффициента передачи в полосе пропускания и равномерностью коэффициента передачи вне полосы пропускания) имеет частотную характеристику представленную на рисунке. На практике этот фильтр может быть собран на трех фильтрах второго порядка. Проектирование фильтра 6 порядка является непростой задачей, а удовлетворение техническим требованиям по неравномерности характеристики в 0. 5 д. Б требует точного подбора компонентов.

Рис. 4. Структурная схема цифрового фильтра В дискретных системах, даже с высокой степенью избыточной дискретизации, требуется наличие аналоговых ФНЧ перед АЦП и после ЦАП для устранения эффекта наложения спектра. С ростом частоты, сигналы выходят за рамки возможностей доступных АЦП. и цифровая фильтрация становится невозможной. Но на крайне высоких частотах активная аналоговая фильтрация тоже невозможна из-за ограничений, связанных с полосой пропускания и искажениями ОУ. и в этих случаях требования фильтрации удовлетворяются пассивными элементами.

Цифровая фильтрация Рис. 5. Модель цифровой системы для обработки аналоговой информации

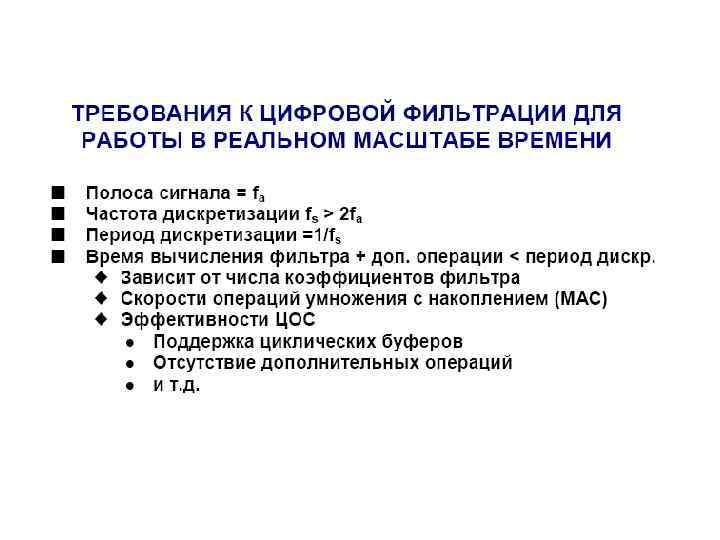
ДИСКРЕТИЗАЦИЯ АНАЛОГОВЫХ СИГНАЛОВ ПО ВРЕМЕНИ Выборка непрерывных аналоговых данных должна осуществляться через интервал дискретизации ts = l / fs. который необходимо тщательно выбирать для точного представления первоначального аналогового сигнала. Чем больше число отсчетов (более высокие частоты дискретизации), тем более точным будет представление сигнала в цифровом виде, тогда как в случае малого числа отсчетов (низкие частоты дискретизации) может быть достигнуто критическое значение частоты дискретизации, при котором теряется информация о сигнале.

Критерий Найквиста требует, чтобы частота дискретизации была по крайней мере вдвое больше полосы сигнала, в противном случае информация о сигнале будет потеряна. Если частота дискретизации меньше удвоенной полосы аналогового сигнала, возникает эффект, известный как наложение спектров (появление ложных частот).
, e(k")
Цифровая фильтрация сигналов сводится к обработке полученной извне последовательности выборок входной переменной e(k), e(k − 1), …, e(k − n) так, что рассчитанная при этом цифровая последовательность будет обладать заданными свойствами. Для фильтра n-го порядка дискретная модель представляет собой линейное разностное уравнение n-го порядка: u(k) + a 1 u(k − 1) + a 2 u(k − 2) +…+ anu(k − n) = = b 0 e(k) + b 1 e(k − 1) +…+ bne(k − n), где a 1, a 2, …, an, b 1, b 2, …, bn константы со знаком, e(k), e(k − 1), …, e(k − n) – последовательный ряд выборок входной переменной на текущем, предыдущем и т. д. интервале дискретизации; u(k), u(k − 1), …, u(k − n) – последовательный ряд выходных значений, т. е. выходных отсчётов рассчитанных, соответственно, предыдущем и т. д. интервалах дискретизации на текущем,

Основные типы цифровых фильтров 1. Нерекурсивный фильтр. Если все коэффициенты ai = 0, то цифровой фильтр называется нерекурсивным или фильтром скользящего среднего с конечной импульсной характеристикой (КИХ). Это означает, что если в течение некоторого времени все последовательные значения uj кроме одного, равны нулю, то на выходе фильтра сигнал будет отличен от нуля только на т временных интервалах. 2. Рекурсивный фильтр. Если некоторые либо все коэффициенты аj не равны нулю, то такой фильтр называется рекурсивным авторегрессивным и имеет бесконечную импульсную характеристику (БИХ). У БИХ фильтра входной сигнал, отличающийся от нуля только на одном временном интервале, вызовет появление на выходе сигнал отличного от нуля в течение бесконечно долгого времени.

Фильтры могут быть "причинными" и "непричинными". Причинный фильтр вычисляет выходное значение на основании ранее введенных данных (в любой момент t 0 учитываются входные значения только для t < t 0 ). Поэтому все фильтры реального времени (on-line) являются причинными. Последовательность отфильтрованных значений на выходе будет отставать на некоторое время по сравнению последовательностью на входе. Непричинный фильтр. Если данные обрабатываются в автономном режиме (off-line), например при анализе серии значений уже собранных ранее измерении, можно использовать непричинный фильтр. В этом случае расчет для моментов времени t 0 можно производить на основе как предыдущих (t < t 0), так следующих (t > t 0) значений.
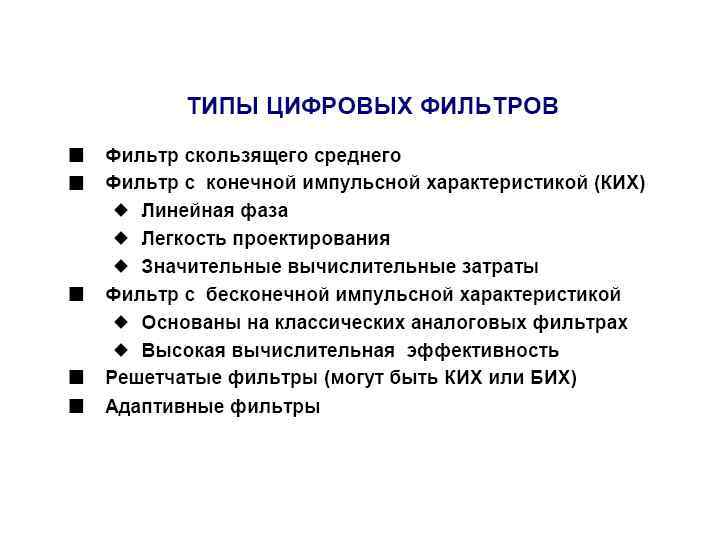

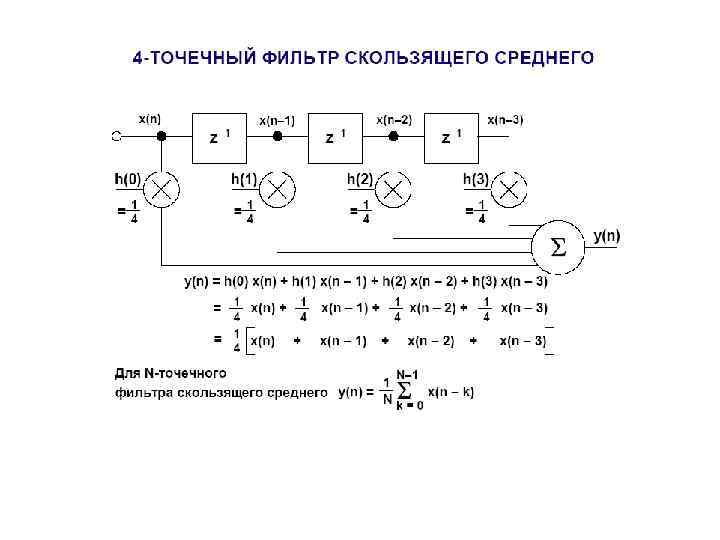
Рис. 7. Обобщенная форма КИХ-фильтра с числом звеньев N КИХ-фильтр должен работать в соответствии с уравнением, задающим свертку: где h(k) − массив коэффициентов фильтра и x(n − k) − входной массив данных фильтра Число N в уравнении представляет собой число звеньев и определяет эффективность фильтра. КИХ-фильтр с числом звеньев N требует N циклов (операций) умножения с накоплением.
, х(1), х(2), х(3) в регистрах. Эти величины суммируются")
Вначале запоминаются первые четыре отсчета х(0), х(1), х(2), х(3) в регистрах. Эти величины суммируются и затем умножаются на коэффициент, например, 0. 25 для получения первого выхода у(3). Заметьте, что начальные значения выходов у(0), у(1) и у(2) некорректны, потому что пока отсчет х(3) не получен, не все регистры заполнены. Когда получен отсчет х(4). он суммируется с результатом, а отсчет х(0) вычитается из результата. Затем новый результат должен быть умножен на 0. 25. Поэтому вычисления, требуемые для получения нового значения на выходе, состоят из одного суммирования, одного вычитания и одного умножения, независимо от длины фильтра скользящего среднего.


Фильтр скользящего среднего не имеет выброса по фронту входного сигнала. Это делает его полезным в приложениях обработки сигналов где требуется фильтрация случайного белого шума при сохранении характера входного импульса. Существенно, что время реакции фильтра на ступенчатое воздействие от 0 % до 100 % равно произведению общего количества точек фильтра на период дискретизации.

Из всех возможных линейных фильтров фильтр скользящего среднего дает самый низкий уровень шума при заданной крутизне фронта импульса. Это видно из рисунка, где уровень шума понижается по мере увеличения числа точек.

Существенно улучшить эффективность простого KИX-фильтра скользящего среднего можно, выбирая разные веса или значения коэффициентов вместо равных значений. Крутизна спада может быть увеличена добавлением большего количества звеньев в фильтр, а характеристики полосы затухания улучшаются выбором надлежащих коэффициентов фильтра. Сущность проектирования КИХ-фильтра сводится к выбору соответствующих коэффициентов и необходимого числа звеньев при формировании желаемой частотной характеристики фильтра H( f ).
Л14. Цифровая обработка сигналов.ppt