новая биомеханика.pptx
- Количество слайдов: 31



БИОМЕХАНИКА

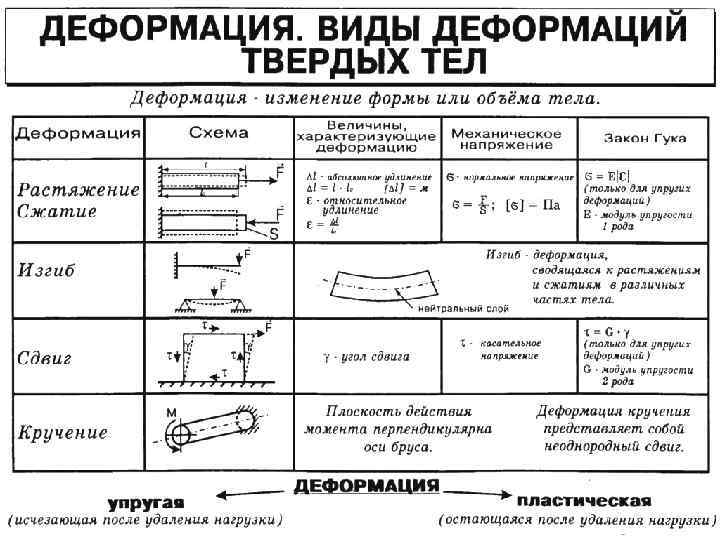
Внешние силы. Деформации. Внешние силы – это силы, действующие на тело со стороны окружающих тел: 1)объемные; 2)Поверхностные (распределенные и сосредоточенные). Нагрузка – это система внешних сил, приложенных к телу, находящемуся в равновесии: 1)статические; 2)Динамические (ударные и периодические). Деформация – это изменение формы и/или размеров тела. Виды деформации: • Линейные и угловые • Абсолютные и относительные • Продольные и поперечные • Упругие и остаточные

Продольная (линейная) деформация – изменение размеров тела вдоль линии действия силы. Угловая деформация –")
1)Продольная (линейная) деформация – изменение размеров тела вдоль линии действия силы. Угловая деформация – изменение угловых размеров тела (сдвиг). 2)Абсолютная деформация – это изменение линейных размеров тела ΔL. Относительная деформация (мера деформации) – это отношение абсолютной деформации к первоначальным размерам тела. ε = ΔL / L⁰. 3)Продольная деформация – изменение размеров тела вдоль линии действия силы. Поперечная деформация – отношение изменения поперечного сечения тела к его первоначальному значению. 4)Упругие деформации – это деформации, исчезающие после снятия нагрузки. Свойство тел принимать после разгрузки свою первоначальную форму (размер) называется упругостью. Если после снятия нагрузки тело не принимает первоначальную форму (объем), то это пластические деформации.

Внутренние силы. Напряжения. Внутренние силы – это силы взаимодействия между частицами материала, т. е. это силы межмолекулярного взаимодействия. Внутренние силы (силы упругости) стремятся вернуть телу первоначальную форму (объем). Если внешние силы не лежат в одной плоскости, то в поперечном сечении, в общем случае, могут возникнуть 6 внутренних усилий: силы Fx , FY , FZ и моменты сил MX , MY , MZ Для нахождения внутренних усилий составляют уравнения равновесия: ∑ Fx = 0 ; ∑ FY = 0 ; ∑ FZ = 0 ∑ MX = 0 ; ∑ MZ = 0
 FZ = const ; FY")
Вид деформации определяется наличием или отсутствием этих факторов: 1) FZ = const ; FY = FX = 0 – одноосное растяжение или сжатие; 2) MZ = const – кручение; 3) MX(MY) = const – изгиб; 4) MX = const MZ = const – поперечный изгиб

Напряжение — это мера внутренних сил, возникающих в деформируемом теле под влиянием различных факторов. [Па] : Нормальное механическое напряжение — приложено на единичную площадку сечения, по нормали к сечению. σ = F/ S (H/M 2 = Па) Касательное механическое напряжение — приложено на единичную площадку сечения, в плоскости сечения по касательной к поверхности. τ = F/ S (H/M 2 = Па) Механическое напряжение численно равно величине внутренней силы, приходящейся на единицу площади. Представление об изменениях, возникающих в теле , дают эпюры – графики, показывающие как меняются в различных сечениях тела силы, моменты сил, напряжения и деформации.

Эпюры сил, напряжений и деформаций, возникающих в штифте, используемом для протезирования. нормальная сила N

Законы упругой деформации Между деформациями твердого тела и напряжениями, возникающими в материале, существует связь, которая была установлена в 1678 году английским физиком Робертом Гуком. 1) ΔL = (F L 0) / (S E) или σ = E ε Нормальное напряжение прямо пропорционально линейной деформации. E – коэффициент, зависящий от материала; модуль упругости 1 рода; модуль Юнга (Па); (E S) – жесткость, характеризующая способность материала сопротивляться деформированию. Модуль Юнга численно равен напряжению, возникающему в теле при единичной относительной деформации. Eстали =210 ГПа Eкости = 10 ГПа Для материалов, не подчиняющихся закону Гука, соотношение между напряжением и деформацией имеет вид: σm = E ε.
 Чистый сдвиг – это такое напряженное состояние, при котором на гранях выделенного элемента")
2) Чистый сдвиг – это такое напряженное состояние, при котором на гранях выделенного элемента возникают только касательные напряжения. Для упругих деформаций выполняется закон Гука для сдвига: τ = G γ, где G – модуль сдвига, модуль упругости 2 рода. Экспериментально установлено, что при упругих деформациях отношение относительной поперечной деформации к относительной продольной деформации постоянно для данного материала – коэффициент Пуассона μ = εпопер / εпрор характеризует способность материала к поперечным деформациям. Для всех материалов 0<μ>0, 5. G = E / 2( 1+ μ )
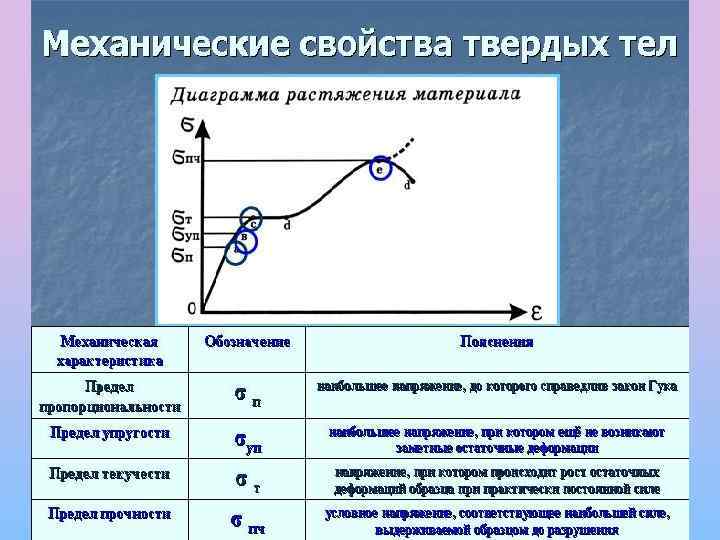

Прочностью стоматологического материала называется способность сопротивляться действию механических нагрузок, постоянно действующих в полости рта и способных вызвать деформацию материала и его разрушение. Напряжения, обеспечивающие безопасную работу, должны быть меньше предельных напряжений, при кот возникают необратимые деформации. Условия прочности: σmax ≤ σдоп , где σдоп = σпред/n τmax ≤ τдоп, где τдоп = τпред/n n – запас прочности n = 2 – 3 ; σпред = σт – для пластических материалов n = 3 – 5 ; σпред = σв – для хрупких материалов В стоматологии рекомендуется при конструировании деталей зубных протезов применять 4 -х кратный запас прочности.

Пластичность, твердость, хрупкость Пластичность – это способность материала изменять свою форму под действием нагрузки и не возвращаться в первоначальное состояние после снятия этой нагрузки. Пластичность материала характеризуется двумя величинами: 1. Относительным остаточным удлинением εr=(L – L 0)/ L 0 2. Относительным остаточным сужением ψr = (S 0 – S)/ S 0 Хрупкость – свойство, противоположное пластичности, разрушение материала при незначительных деформациях. Твердость – это способность поверхностного слоя материала противостоять деформациям от статических или динамических сжимающих усилий. Способы определения твердости: 1. вдавливание различных наконечников (методы Бринелля, Роквелла, Виккерса); 2. царапание поверхности; 3. ударом, по отскоку Упругость – это свойство материала принимать первоначальную

Экстракция зубов и простейшие механизмы История удаления зубов относится ко временам Аристотеля (384 – 322 до н. э. ), когда он описал механику щипцов для удаления: преимущество « 2 -х рычагов, действующих в противоположных направлениях и имеющих одну точку опоры» . Простейший механизм – устройство, дающее выигрыш в силе: клин, рычаг, колесо, винт, шкив. Эти устройства передают или изменяют силу или вращающий момент. Наиболее простые инструменты, используемые для извлечения зубов, - клин и рычаг. Клин – простой механизм в виде призмы, рабочие поверхности которого сходятся под острым углом, используется для раздвижения, разделения на части обрабатываемого предмета. Идеальный выигрыш в силе, даваемый клином, равен отношения его длины к толщине на тупом конце. Клин изменяет направление действия силы.

Рычаг –твердое тело, которое может вращаться вокруг неподвижной опоры. Кратчайшее расстояние между точкой опоры и прямой, вдоль которой действует на рычаг сила, называется плечом силы d. Условие равновесия: ∑ Mi = 0 , где M = Fd – момент силы F 1 d 1 = F 2 d 2 Рычаг используется для получения большего усилия на коротком плече с помощью меньшего усилия на длинном плече.

Рычаг первого рода d 1 плечи сил d 2 А В Ось вращения Точки приложения сил

Рычаг второго рода d 2 - плечо силы F 2 А Точки приложения сил d 1 -плечо силы F 1 Ось вращения В
 зубов в стоматологии используются следующие инструменты: элеваторы, периотомы, щипцы и")
Для экстракции (удаления) зубов в стоматологии используются следующие инструменты: элеваторы, периотомы, щипцы и физиологические щипцы. Дентальные элеваторы и периотомы используют механическое преимущество клина, чтобы начать люксацию зуба для его удаления, когда они вдавливаются вдоль корня зуба. Элеватор может действовать как рычаг, чтобы поднять зуб из лунки, когда край кости используется как точка опоры. Дентальные щипцы фактически являются двумя рычагами 1 -го рода, соединенными в основании стержнем. Сила прикладывается на ручки (длинные стороны рычага), клювы накладываются на зуб – короткая сторона рычага, стержень действует как точка опоры.





Физиологические щипцы Physics Forceps – это зубные экстракторы, которые используют механику рычага 1 -ого рода. Одна ручка устройства связана с «бампером» , который действует как точка опоры при извлечении зуба. Клюв экстрактора помещается с лингвальной поверхности корня зуба и в десневой бороздке. Бампер помещается в фасциальную область альвеолы в области переходной складки. Никакого давления, сжатия не применяется. Вместо этого ручки инструмента вращаются как единое целое на несколько градусов и затем останавливаются приблизительно на 1 минуту. Постоянное, устойчивое давление вызывает деформацию, которая, в свою очередь, приводит к расширению кости и ослаблению периодантальных связок. Последующее медленное вращение ручек инструмента еще на несколько градусов в течении 10 – 30 секунд приводит к разрыву связок и зуб поднимается на несколько миллиметров из лунки. Таким образом, зуб полностью освобожден и готов к удалению из лунки.




) Упругое тело:")
Реология. Реологические модели. (Ремизов А. Н. § 8. 3(стр. 139 – 145)) Упругое тело: Вязкоупругие тела: • Модель Максвелла • Модель Кельвина - Фойхта
 F =const 2 случай (деформация постоянна) =")
Модель Максвелла 1 случай (сила действует постоянно) F =const 2 случай (деформация постоянна) = const

Модель Кельвина –Фойхта
новая биомеханика.pptx