БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО.ppt
- Количество слайдов: 24



БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА • К основному недостатку коллекторного двигателя постоянного тока следует отнести наличие скользящих контактов в щеточно-коллекторном узле. Подвижный контакт между щетками и коллектором снижает надежность работы и создает электромагнитные помехи в широком диапазоне частот. В агрессивных средах, а также при высоком вакууме работа таких двигателей практически невозможна. Все это обусловило разработку двигателя без щеточно-коллекторного узла, но с сохранением основных достоинств коллекторного двигателя. • В бесконтактном двигателе постоянного тока (БДПТ) на роторе устанавливают постоянные магниты, создающие поток возбуждения. Обмотка якоря располагается в пазах статора. Коммутация секций якорной обмотки осуществляется полупроводниковым коммутатором, управляемым датчиком положения ротора (ДПР). В качестве ключевых элементов используются транзисторы или тиристоры. Коммутатор выполняет функции коллектора обычной машины постоянного тока.

С датчика положения ротора снимаются периодические сигналы, по которым электронный коммутатор поочередно подключает секции якорной обмотки к источнику питания. Это приводит к возникновению вращающего магнитного поля статора и, как следствие этого, вращение ротора. Таким образом, частота переключений секций якорной обмотки определяется угловой скоростью ротора, т. е. , как и в случае коллекторного двигателя, регулируется самой машиной. Реверс БДПТ производится путем изменения последовательности подключения силовых обмоток статора к источнику питания. Такое изменение производится переключением в электронном коммутаторе либо использованием двух комплектов датчиков положения ротора (ДПР).

Рис. 1 Схема соединения обмоток БДПТ Статор двигателя выполнен в виде неявнополюсной конструкции с 4 полюсами и статорной обмоткой возбуждения состоящей из четырех секций Н 1, К 1; К 2, Н 2; Н 3, К 3 и К 4, Н 4, а также тахогенераторной обмотки Н 5, К 5. Рис. 2 Размещение секций обмотки на полюсных наконечниках статора. На полюсных наконечниках 1 и 2 размещены секции Н 1, К 1 и К 2, Н 2, а на полюсах 3 и 4 секции Н 3, К 3 и К 4, Н 4. Соединения секций выполнено в соответствии со схемой на Рис. 1.

В двигателе БК-1424 в качестве датчиков положения ротора применены два датчика Холла. Каждый датчик выполнен в виде прямоугольной пластины из полупроводникового материала (кремния), рис. 3. К металлизированным граням 1 -1 припаяны выводы, называемые токовыми, через которые датчик подключается к источнику питания и через пластину начинает протекать ток. Если при этом поместить пластину в постоянное магнитное поле Н, перпендикулярное плоскости датчика, то между выводами 2 -2 (холловские выводы) возникает разность потенциалов U, определяемая выражением: Рис. 3. , где I ток, текущий через пластину; Н – напряженность магнитного поля; h – толщина пластины; R – коэффициент Холла. При изменении направления поля Н или тока I меняется знак, возникающей разности потенциалов U.

Рис. 4 В кчестве датчиков положения ротора относительно статора могут использоваться индукционные датчики (Рис. 4). Датчик состоит из закрепленного на статоре двигателя шихтованного Ш-образного сердечника 1 с первичной 2 и вторичной 3 обмотками. На роторе размещаются магнитомягкие накладки 4, которые при определенном угле поворота ротора перекрывают зазор между средним и одним из крайних выступов сердечника 1. Обмотка 2 на среднем выступе питается от генератора высокой частоты (1, 5 -2 к. Гц). Когда под сердечником накладки 4 нет, сигнал в выходной обмотке 3 отсутствует, так как магнитная система симметрична. Если накладка перекрывает зазор сердечника 1, то симметрия магнитной системы нарушается и в обмотке 3 появляется высокочастотный сигнал, из которого формируются прямоугольные импульсы, подаваемые на управляющие электроды электронного блока.

Рассмотрим работу бесконтактного двигателя с помощью рис. 2 и приведенной на рис. 5 упрощенной принципиальной схемы электронного коммутатора. Четыре силовых транзистора VT 3, VT 4 и VT 9, VT 10, в коллекторные цепи которых включены обмотки статора, по сигналам с датчиков Холла Х 1 и Х 2 подключают их к источнику питания двигателя. При этом датчик Х 2 управляет работой транзисторов VT 3 и VT 4, а датчик Х 2 работой транзисторов VT 9 и VT 10. Транзистор VT 3 коммутирует секцию К 4, Н 4, VT 4 – секцию Н 3, К 3, VT 9 – секцию Н 1, К 1 и VT 10 – секцию К 2, Н 2. В отсутствие сигналов с датчиков Холла Х 1 и Х 2 все четыре транзистора заперты и двигатель обесточен. Каждая секция, например Н 1, К 1, состоит из двух катушек, соединенных последовательно и размещенных на статорных полюсных наконечниках 1 и 2. На тех же полюсных наконечниках находятся катушки секции К 2, Н 2. Аналогично на полюсных наконечниках 3 и 4 размещены катушки секций Н 3, К 3 и К 4, Н 2. Такое размещение двух секций на каждой паре полюсных наконечников позволяет менять направление магнитного потока статора. Изменение магнитного потока достигается тем, что у первой и третьей статорных секций с источником питания через силовые транзисторы соединяется начало обмоток Н 1 и Н 3, а у второй и четвертой секции конец обмоток К 2 и К 4.

Пусть на тактовые выводы датчиков Холла Х 1 и Х 2 подано напряжение и через датчики протекает ток, а южный полюс ротора (Рис. 5) находится под датчиком Х 2. В этом случае условия возникновения эффекта Холла выполнены и между холловскими выводами датчика Х 2 возникает разность потенциалов. Пусть положительный потенциал с датчика Х 2 подан на базу транзистора VT 3 – транзистор открывается и подключает секцию Н 3, К 3, размещенную на полюсах 3 и 4, к источнику питания двигателя. При этом на полюсном наконечнике 3 образуется северный полюс, а на полюсном наконечнике 4 – южный, и ротор поворачивается на 90 по часовой стрелке.

Теперь южный полюс ротора находится под датчиком Х 1 и положительный потенциал с датчика Х 1 открывает транзистор VT 10 и подключает к источнику питания секцию К 2, Н 2. На полюсном наконечнике 1 образуется южный полюс, а на полюсном наконечнике 2 – северный, и ротор поворачивается еще на 90 по часовой стрелке. Чтобы из этого положения ротор повернулся еще на 90 необходимо, чтобы на полюсном наконечнике 3 возник южный полюс, а на полюсном наконечнике 4 – северный. Это достигается изменением направлением магнитного потока путем подключения к источнику питания секции К 4, Н 4. Далее процесс повторяется.

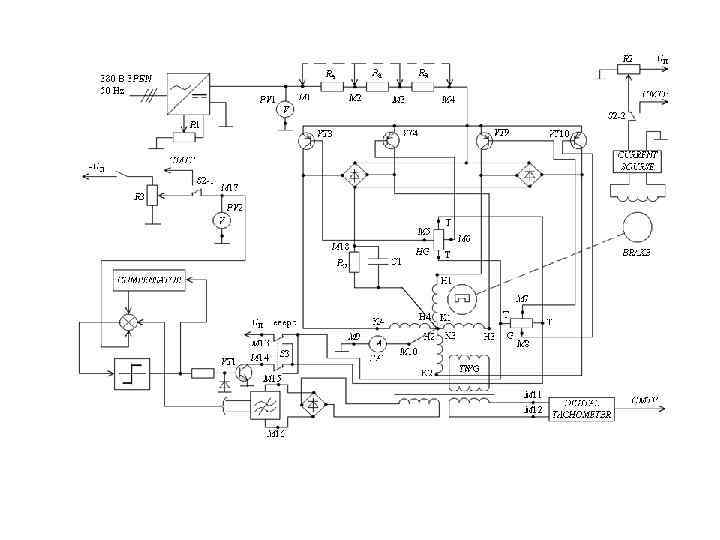
В лабораторном стенде для стабилизации скорости вращения, схема которого показана на рис. 7, введена отрицательная обратная связь по скорости. В качестве датчика скорости используется тахообмотка TGW. При вращении ротора в обмотке наводится переменная ЭДС, величина которой пропорциональна скорости. Переменное напряжение с тахообмотки подается на первичную обмотку трансформатора Т 1. выпрямленное напряжение сравнивается с управляющим напряжением, величина которого может плавно регулироваться потенциометром R 3. При превышении величины управляющего напряжения над выпрямленным напряжением с тахообмотки открывается транзистор VT 1 и на токовые выводы датчиков Холла поступает напряжение. Это приводит к появлению ЭДС на холловских выводах датчиков, включению двигателя и увеличению его угловой скорости.

Увеличение скорости вращения будет происходить до тех пор, пока величина выпрямленного напряжения с тахообмотки не превысит управляющего напряжения. Это приведет к закрытию транзистора VT 1, прекращению подачи напряжения на токовые выводы датчиков Холла и, как следствие этого, обесточиванию двигателя. Двигатель переходит в режим свободного выбега, и его скорость вращения будет снижаться до тех пор, пока не откроется транзистор VT 1. Далее процесс будет повторяться, и угловая скорость двигателя поддерживаться на уровне, определяемом величиной управляющего напряжения.

У бесколлекторных двигателей постоянного тока коммутируемые секции статорной обмотки имеют большее количество витков, чем в коллекторных машинах. Поэтому при выводе уравнений механических и регулировочных характеристик следовало бы учитывать ЭДС самоиндукции в коммутируемой катушке. Однако большинство бесконтактных микродвигателей выполнены с возбуждением от постоянных магнитов. Постоянный магнит ротора таких двигателей имеет малую магнитную проницаемость, и индуктивность статорной обмотки получается малой. Поэтому механические и регулировочные характеристики у БДПТ сохраняются практически линейными, как у коллекторных двигателей.

Так же, как у коллекторного двигателя постоянного тока, скорость вращения БДПТ может регулироваться изменением напряжения питания и введением добавочного сопротивления в цепь якоря. При изменении напряжения питания регулирование угловой скорости осуществляется вниз от основной, так как напряжение, прикладываемое к якорю, может изменяться только вниз от номинального. При изменении напряжения регулировочные характеристики располагаются параллельно другу, т. е. имеют одинаковую жесткость. Плавность регулирования определяется плавностью изменения напряжения питания. Рис. 6 Семейство механических характеристик БДПТ при различных величинах питающего напряжения Uн U 1 U 2.

Конструктивно тахообмотка размещена непосредственно в пазах статора вместе с обмоткой якоря, и между ними имеется индуктивная связь. Поэтому на тахогенераторной обмотке, кроме ЭДС вращения, наводится ЭДС самоиндукции, возникающая при коммутации секций якорной обмотки силовыми транзисторами VT 3, VT 4 и VT 9, VT 10. Это приводит к некоторому отклонению линейной зависимости скорости вращения двигателя от величины управляющего напряжения.
 изменяется жесткость характеристики, а")
При введении добавочного сопротивления в якорную цепь БДПТ (реостатное регулирование) изменяется жесткость характеристики, а значит, и стабильность угловой скорости. Регулирование скорости таким способом также возможно только вниз от основной, и жесткость характеристик уменьшается с увеличением добавочного сопротивления. На рис. 3 приведены механические характеристики БДПТ при реостатном регулировании скорости вращения (Rд = 0; Rд 2 Rд 1).

Реверс БДПТ производится путем изменения последовательности подключения силовых обмоток статора к источнику питания. Такое изменение производится переключением в электронном коммутаторе либо использованием двух комплектов датчиков положения ротора (ДПР). Характеристики БДПТ тем ближе к характеристикам классического коллекторного двигателя постоянного тока, чем больше число катушек силовой якорной обмотки, размещенной на статоре. Однако пропорционально числу катушек увеличивается число датчиков положения ротора и усложняется конструкция электронного коммутатора. Поэтому в практических конструкциях размещение на статоре более 3 -4 катушек нецелесообразно.

Двигатели серии БК Бесконтактные двигатели постоянного тока серии БК — силовые, реверсивные, с встроенным коммутатором. В качестве датчиков положения ротора использованы датчики Холла. Для контроля частоты вращения предусмотрен встроенный таходатчик. Режим работы — продолжительный. Напряжение питания 27 В. Крепление двигателя — фланцевое с упорным буртиком.
 электродвигатель постоянного тока с датчиком частоты вращения,")
Электродвигатель бесконтактный постоянного тока ДБУ-70 вентильный (бесконтактный) электродвигатель постоянного тока с датчиком частоты вращения, позволяющим осуществлять глубину регулирования частоты вращения до 300.

. При проектировании использованы технические решения и проведена унификация узлов с ранее выпускавшимися электродвигателями серии БК, ДБ, использовавшимися в ракетно-космической технике (КС «Мир» , КА «Салют» , «Буран» , «Союз» и др. ) для систем жизнеобеспечения космонавтов. Технические характеристики на Электродвигатели бесконтактные постоянного тока ДБУ-70 Тип ДБУ-70 Напряжение, В 15 Полезная мощность, Вт 75 Частота вращения, об/мин. Нагрузочный момент, номинальный, Нм 1200 0, 6

Электродвигатели бесконтактные постоянного тока ДБ 120 применяются для привода автоматических стиральных машин Регулировка частоты вращения от микропроцессорного блока управления, вращение реверсивное, пылебрызгозащищенное исполнение. Технические характеристики на Электродвигатели бесконтактные постоянного тока ДБ 120 Тип Напряжение, В ДБ 120 220 Полезная мощность, Вт 250 или 500 Частота вращения, об/мин. 300 - 12000 Нагрузочный момент, номинальный, Нм Потребляемый ток, А, не более 1, 2 2 Масса, кг 4, 5 Средняя наработка до отказа, ч. 500 Срок службы, лет 15
 реализует обратную связь по положению ротора. Его работа может быть")
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшее применение получили датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора. Фотоэлектрические датчики- неподвижные фотоприёмники, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором.

Достоинства: Высокое быстродействие и динамика, точность позиционирования Широкий диапазон изменения частоты вращения Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина Возможность использования во взрывоопасной и агрессивной среде Большая перегрузочная способность по моменту Высокие энергетические показатели (КПД более 90 % и соsφ более 0, 95) Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов Низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками Недостатки: Относительно сложная система управления двигателем Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора Во многих случаях оказывается более рациональным применение асинхронного двигателя с преобразователем частоты.
 — деталь электродвигателя. В коллекторных электродвигателях датчиком положения ротора является")
Датчик положения ротора (ДПР) — деталь электродвигателя. В коллекторных электродвигателях датчиком положения ротора является щёточно-коллекторный узел, он же является и коммутатором тока. В бесколлекторных электродвигателях датчик положения ротора может быть разных видов: Магнитоиндукционный (иногда для этого используются рабочие обмотки двигателя) Магнитоэлектрический (датчики на эффекте Холла) Оптоэлектрический (на различных оптопарах: светодиод-фотодиод, светодиод-фототранзистор, светодиод-фототиристор).

БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО.ppt