Lektsia__2 готовое.ppt
- Количество слайдов: 146



БАЛТИЙСКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ РЫБОПРОМЫСЛОВОГО ФЛОТА Кафедра «Защита в чрезвычайных ситуациях» Тема № 2: Устройство и рабочее оборудование землеройной техники, применяемой для ведения АСДНР старший преподаватель Напханюк М. А. Калининград 2012 г.

Вопросы: 1. Характеристика грунтов и способы их разработки. 2. Классификация и общая характеристика рабочего оборудования спасательной техники. 3. Общие сведения о рабочих параметрах и процессах. 4. Классификация, характеристика приводов и ходового оборудования машин для земляных работ. 5. Классификация экскаваторов и их рабочее оборудование. 6. Компоновка и общее устройство котлованных машин.

Литература: 1. Учебники "Машины инженерного вооружения", кн. 1, 2, 4, Воениздат, М 86. 2. Васильченков В. Ф. , Военные гусеничные машины, часть 1 и 2. Учебник, Рыбинский Дом печати, 1998 г. 3. Технические описания и инструкции по эксплуатации одноковшового экскаватора ЭОВ 4421. 4. Свищев В. В. , Федорук В. С. , Мармузов В. В. Средства механизации спасательных и других неотложных работ. Учебное пособие, АГЗ, 1996 г. , 144 с.

Введение Подготовка путей продвижения и маневра является одной из важнейших задач инженерного обеспечения действий сил и средств аварийно спасательных формирований (АСФ) МЧС России. От успешного выполнения этой задачи в высоких темпах во многом будет зависеть и результат АСДНР, а следовательно и чья то жизнь. Наиболее трудоемкими работами при подготовке путей передвижения сил и средств АСФ являются: земляные работы при оборудовании объездов разрушенных участков дорог, устройства съездов к мостам и переправам, устройство мостовых переходов через ручьи и неширокие реки и каналы; проделывание проходов в завалах на участках дорог, возникших в результате обрушения зданий и сооружений; срезание неровностей и профилирование отдельных участков при прокладывании колонных путей по целине; усиление слабых участков особенно на подходах к рекам и переправам; работы по прокладыванию колонных путей по снежной целине и очистке существующих дорог от снега, селя, камней и др.

Характерными особенностями дорожных и земляных работ, выполняемых в ходе инженерного обеспечения действий сил АСФ, являются их большой объем и рассредоточенность по многим объектам. Условия выполнения этих работ также резко отличаются от условий выполнения земляных работ в народном хозяйстве. Основные особенность производства дорожных и земляных работ в ходе инженерного обеспечения ведения АСДНР состоят в следующем: как правило, работы начинаются без тщательной разведки местности и грунтовых условий; работы производятся независимо от времени года, суток и состояния погоды; во многих случаях работы могут производится на зараженной местности или под непосредственным воздействием поражающих факторов ЧС (вода затопления; лава вулкан, сход лавины, проход селя и т. д. ). Перечисленные выше особенности дорожных и земляных работ и условия их выполнения в ходе ведения АСДНР должны учитываться как при выборе средств механизации из числа существующих, так и проектировании новых средств.

1. Характеристика грунтов и способы их разработки.
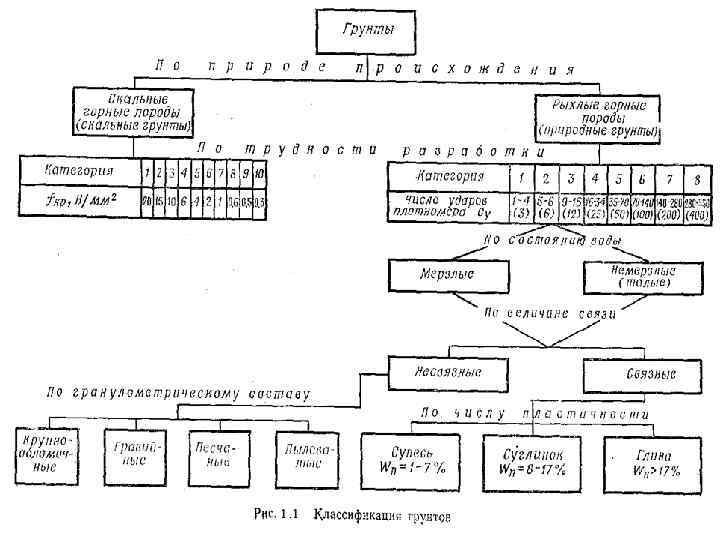

Землеройные машины в процессе инженерных работ взаимодействуют с различными средами. К основным средам, свойства которых необходимо учитывать при проектировании и эксплуатации машин, относятся грунт, древесина, снег, лед, вода, воздух. Рабочие органы большинства машин взаимодействуют с грунтом, древесиной, снегом и льдом; остов машин взаимодействует с воздухом и водой; движители — с грунтом, снегом, льдом, а движители плавающих машин — дополнительно с водой. Грунты делятся на две большие группы: рыхлые горные породы (природные грунты); скальные горные породы (скальные грунты). Природные грунты образовались в результате физического и химического выветривания горных пород. Их верхний слой, измененный совместным действием климата, воды и газов, растительных и животных организмов, представляет собой особое структурное органоминеральное образование — почву. Характерной особенностью природных грунтов является их раздробленность, дисперсность, что коренным образом отличает их от скальных горных пород.

В состав скальных и природных грунтов входят разнообразные элементы, которые можно объединить в следующие три группы (рис. 1. 1, а): твердые минеральные частицы V 3; вода в различных видах и состояниях V 2; газообразные включения V 1. Несколько другая модель мерзлого грунта (рис. 1. 1, б). Мерзлый грунт включает: минеральные частицы V 4; лед V 3; незамерзшую воду V 2 и га зообразную составляющую 1. Знание фазовой модели V грунта имеет существенное значение, так как соотношение фаз в основном определяет величину сопротивления грунта разрушению. Рис. 1. 1. Модель грунта: а — немерзлого; б — мерзлого; V 0 — общий объем грунта

На процесс взаимодействия грунта с машиной основное влияние оказывают физические и механические свойства грунта. Под физическими свойствами подразумеваются те свойства, которые отражают физическое состояние грунта. К ним относятся: плотность, влажность, пластичность, липкость, разрыхляемость, пористость, примерзаемость, связность.

Рис. 1. 2. Идеализированная модель грунта: 1 — линейно упругий элемент; 2 — вязкий элемент; 3 — пластичный элемент; Fр— растягивающая сила; Fn— нормальная сила

Плотность — это отношение массы грунта т при естествен ной влажности к его объему : V ρ г = т/V. Для большинства природных грунтов плотность составляет 1, 5— 2, 0 т/м 3, а для скальных грунтов примерно равна плотности твердых минеральных частиц и составляет 5— 8 т/м 3. С помощью этого показателя определяют массу грунта в транспортирующих элементах землеройных машин.

Влажность — это отношение массы воды, содержащейся в порах некоторого объема грунта, к массе грунта, высушенного до постоянной массы при температуре 105° С. где т1— масса грунта до высушивания, кг; т2 — масса грунта после высушивания, кг. Влажность грунта может изменяться в широких пределах и является одним из важнейших показателей физического состояния грунта.

В зависимости от степени влажности природные грунты могут находиться в различном состоянии (рис. 1. 3): твердом, пла стичном и текучем. Значения влажности, соответствующие пере ходным состояниям грунта, называют критическими или порого выми. Рис. 1. 3. Состояния грунта: 1 — твердое; 2 — пластичное; 3 — текучее

Пластичность — это способность грунта изменять свою форму без изменения объема. Показателем свойства пластичности является число пластичности Wп = Wт Wр, где Wт — влажность при переходе грунта из пластичного состояния в текучее (граница текучести); Wр— влажность при переходе грунта из твердого состояния в пластичное (граница раскатывания). Границы текучести и раскатывания определяют в лабораторных условиях по ГОСТ 5183— 77.

Липкость — это способность грунта прилипать к рабочим поверхностям машины при соприкосновении. Она оказывает суще ственное влияние на производительность машин. Удельная сила прилипания к стали, например, составляет 1— 2 Н/см 2. С возрастанием влажности W (рис. 1. 4) липкость Fл увеличивается, но до известного предела. Липкость выражается отношением усилий, не обходимых для отрыва прилипшего к грунту предмета, к площади прилипания. Значения липкости глинистого грунта приведены в табл. 1. 1. Рис. 1. 4. Зависимость липкости от влажности.

Разрыхляемость — это способность грунта увеличиваться в объеме при разработке. В процессе разработки грунт превращается в кусковатый или сыпучий материал с объемом пор и пустот, значительно большим, чем до разработки. Таблица 1. 1 Зависимость липкости грунта от влажности и материала рабочей поверхности Материал Сталь необработанная Сталь обработанная Чугун обработанный Алюминий Лента транспортная Резина Стекло Камень цементный Влажность, Липкость, % Н/см 2 25, 1 1, 0 26, 8 2, 5 27, 7 2, 9 24, 6 2, 7 24, 9 1, 2 24, 5 0, 7 25, 4 3, 2 26, 8 2, 9

Показателем разрыхляемости является коэффициент разрыхления Краз, равный отношению объема разрыхленного грунта к объе му, который грунт занимал в естественном залегании. Среднее значение коэффициента колеблется от 1, 08 (для песков) до 1, 32 (для глины). При разработке мерзлых грунтов и скальных пород коэф фициент возрастает в 1, 5— 2, 5 раза. Данное свойство грунта необ ходимо учитывать при проектировании транспортирующих емко стей рабочего оборудования машин и при расчете фактической производительности машин.
 в грунте")
Пористость — это отношение объема пор (независимо от того, чем они заполнены) в грунте ко всему рассматриваемому объему грунта. Данное свойство оценивается коэффициентом пористости е, который представляет собой отношение пор в грунте к объему твердых частиц (скелета). Чем пористее грунт, тем он рыхлее, а следовательно, менее прочен и более подвержен деформации. транспортировании.

Примерзаемость — это способность грунта примерзать к частям рабочего органа при отрицательной температуре. Во время замерзания воды в зоне контакта с поверхностями рабочего оборудования машин развиваются силы сцепления, достигающие 200 Н/см 2 и более.

Связность. Частицы грунта находятся между собой в той или иной степени связи. При наличии сильной связи грунт представляет собой монолит, при отсутствии связи грунт находится в сыпучем состоянии. К связным грунтам относятся скальные грунты и глины, к несвязным — сухие пески. Связность выражают коэффициентом сцепления С 0, Па.

Дополнительно к указанным свойствам в практике создания и эксплуатации машин часто используют угол естественного откоса — предельный угол, при котором незакрепленный откос грунта сохраняется в условиях устойчивого равновесия. Величина угла естественного откоса колеблется от 30 (для песков) до 40° (для глины). С его помощью определяются объемы насыпей грунта.

Механические свойства грунтов определяют поведение грунта при воздействии на него внешней нагрузки. Значительное влияние на процесс взаимодействия рабочего оборудования с грунтом и проходимость машин оказывают такие механические свойства грунтов, как сопротивление вдавливанию, сжимаемость, сопротивление сдвигу, внутреннему и внешнему тре нию и бразивность а грунтов.
— это свойство грунта сопротивляться внедрению жесткого штампа. Для оценки сопротивления")
Сопротивление грунта вдавливанию (сжатию)— это свойство грунта сопротивляться внедрению жесткого штампа. Для оценки сопротивления грунта сжатию используется коэффициент сопро тивления грунта сжатию, т. е. напряжение, возникающее при вдавливании в грунт опорной поверхности на глубину 1 см. Данное свойство позволяет оценить несущую способность грунта, соп ротивление грунта разрушению от деформации сжатия и, следо вательно, правильно конструировать ходовую часть и рабочее обо рудование машин. Значение этого коэффициента колеблется в грунтах в пределах 1, 2— 13 Н/см 2.

Рис. 1. 5. Зависимость напряжения от деформации и скорости ее возрастания: σ— напряжение в грунте; Δh — осадка штампа

Приборы, основанные на принципе вдавливания штампов в грунт, называют плотномерами. Примером такого прибора может служить ударник (плотномер) конструкции Дор. НИИ (рис. 2. 6), впервые предложенный профессором А. Н. Зелениным для оценки сопротивления грунта разрушению механическим способом, например резанием. Рис. 2. 6. Плотномер (ударник) конструкции Дор. НИИ: 1 — стержень; 2 — груз; 3 —наконечник (штамп)

Сжимаемость грунтов — это свойство грунтов изменять свой объем под влиянием различных внешних воздействий. Сжимаемость является характерным свойством, существенно отличающим грунты от скальных горных пород и других твердых тел. Под действием сжимающей нагрузки грунт изменяет свое строение на более компактное за счет уменьшения пористости. Процесс сжатия характеризуется компрессионной кривой, которая может быть представлена как графически (рис. 1. 7), так и аналитически: где еi и Fi— соответственно коэффициент пористости и давле ние, соответствующие 1 й ступени нагрузки; е 0 и Fо— соответственно коэффициент пористости и началь ное (атмосферное) давление; ак — коэффициент сжимаемости (компрессии) грунта.

Рис. 1. 7. Компрессионная кривая

При сжатии грунта без возможности его бокового расширения элемент грунта будет испытывать главные напряжения (рис. 1. 8): σг = F; σx = σy =ζб. F, где ζб— коэффициент бокового давления грунта (безразмерная величина), используемый при определении энергетических параметров рабочих органов. Его значения для различных грунтов приведены в табл. 1. 2. Таблица 1. 2.

Рис. 1. 8. Напряжения, действующие на элемент грунта при его сжатии без бокового расширения

При практических расчетах сопротивление грунтов сдвигу определяется по уравнению Кулона: где τ предельное касательное напряжение, Па; σ предельное нормальное напряжение на поверхности сдвига, Па; tg ρ=f коэффициент внутреннего трения; Со коэффициент сцепления частиц грунта (связность), Па.

Графическая интерпретация уравнения Кулона показана на рис. 1. 9. Рис. 1. 9. Диаграмма напряжений при различных видах нагружения: 1— простое растяжение; 2 — чистый сдвиг; 3 — простое сжатие.

Взаимодействие рабочих органов с грунтом сопровождается так называемым внешним трением. Показателем этого свойства является коэффициент внешнего трения fг. м=tgδ, где δ — угол внешнего трения. Величина коэффициента внешнего и внутреннего трения зависит от состава грунта, влажности и давления на поверхность. Взаимосвязь между углами внутреннего ρ и внешнего δ трения характеризуется зависимостью ρ = 0, 756.

Абразивность — это свойство грунта подвергать износу рабочие органы и движители машин твердыми частицами (корун дом, гранитом, кварцем и др. ), которые входят в его состав. Модуль упругости определяется по формуле где F — нагрузка на штамп (резец), Н; σ — коэффициент Пуассона; тs коэффициент формы штампа (табл. 1. 3); SШ — площадь штампа (поверхности износа резца), мм 2; λ — величина осадки при сжатии, мм.

Таблица 1. 3 Значение коэффициента формы штампа Прямоугольник (при отношении большей стороны штампа к меньшей) Круг 1 1, 5 2 3 5 10 20 40 60 80 100 200 0, 96 0, 95 0, 94 0, 92 0, 88 0, 82 0, 71 0, 56 0, 47 0, 43 0, 40 0, 38 0, 30

Коэффициент Пуассона — коэффициент бокового расширения для мерзлых и скальных грунтов находится в пределах от 0, 2 до 0, 4. Крепость скальных грунтов оценивается коэффициентом крепости, предложенным М. М. Протодьяконовым: fкр=σвр/100, который характеризует временное сопротивление образца одноосному сжатию. Временное сопротивление одноосному сжатию σвр определяется через корреляционную связь с числом ударов плотномера Дор. НИИ по формуле: σ вр = ζп. Су, где ζп— коэффициент пропорциональности, равный 0, 2 — 0, 26 для мерзлых грунтов и 0, 26— 0, 32 для скальных грунтов.

Таблица 1. 4 Зависимость напряжений для разрушения от температуры грунтов и видов разрушения

В табл. 1. 4 приведены зависимости напряжений для разруше ния мерзлого грунта от температуры t и вида разрушений. Приняв для всех перечисленных видов разрушения n=0, 5 (что дает максимальную погрешность в пределах 2%), получим общее уравнение х = Аt 0, 5 где будут различны только коэффициенты А. Величина коэффициента А определяет удельную сопротивляемость мерзлых грунтов различным видам разрушения. Из табл. 1. 4 следует, что для разрушения мерзлых грунтов необходимо приме нять такие способы разрушения, при которых преобладают напряжения разрыва.

Таблица 1. 5 Значение показателя механических свойств грунтов

СПОСОБЫ РАЗРАБОТКИ ГРУНТОВ И ГОРНЫХ ПОРОД: механический, взрывной гидравлический. развиваються электрогидравлический и термомеханический способы, которые пока еще не вышли из стадии разработки и освоения.

При производстве инженерными подразделениями АСФ земляных и дорожных работ механический способ разработки грунтов и пород считается основным. Этим способом выполняется 85— 90% всего объема земляных работ. Взрывной способ применяется весьма ограниченно и «главным образом для разрушения мерзлых грунтов и горных пород; средней степени крепости и более крепких. Гидравлический способ разработки грунтов довольно широко применяется в народном хозяйстве страны на гидротехнических строительствах для разработки карьеров и намыва плотин, в под земных забоях (гидрошахтах) для отбойки каменного угля, на работах по устройству спусков к водоемам и углублениях дна.

Эффективность того или иного спосо ба разработки грунта или породы оценивается прежде всего по величине удельной энергоемкости. Под удельной энергоемкостью разработки Эуд понимаются энергетические затраты, произведенные для отделения от материка 1 м 3 грунта или породы и уборки его из забоя. Удельная энергоемкость определяется опытным путем или рассчитывается по формуле: мощность, затрачиваемая рабочим органом и приведенная к валу двигателя землеройной машины, квт; мощность, затрачиваемая для создания усилия подачи машины на забой, квт; Пт техническая производительность машины при разработке грунта или породы, м 3/час.

Рис. 1. 10. Основные схемы разработки грунтов резанием: а — резание грунта по всей поверхности забоя; б — подрезание забоя с последующим обрушением; в — нарезание щелей

Рис. 1. 11. Основные схемы разработки горных пород сколом: а — динамический скол; б — статический

2. Классификация и общая характеристика рабочего оборудования спасательной техники.

Рабочим органом землеройной машины называется та ее часть, которая производит разработку и удаление грунта (или породы) из забоя. Так, рабочим органом бульдозера является отвал, производящий резание грунта и его перемещение; рабочим органом роторного траншейного экскаватора служит ротор вместе с откосообразователями. Во многих землеройных машинах перемещение разработанного грунта от забоя на дневную поверхность производится не грунторазрабатывающим рабочим органом, а специальным транспорти рующим средством, например метателем или ленточным транспортером.

Рис. 2. 1. Рабочий инструмент основных землеройных машин

Рис. 2. 2. Углы, определяющие положение рабочего инструмента

Характеристика рабочего органа землеройной машины включает следующие показатели: характер движения рабочего органа, скорость движения рабочего органа, характер взаимодействия элементов рабочего органа с грунтом, размер и форму создаваемой выемки. Эти основные показатели могут быть дополнены данными об энергоемкости процесса, габаритных размерах рабочего органа, металлоемкости, сроках службы и другими эксплуатационными показателями.

По характеру рабочего процесса землеройные и дорожные машины разделяются на: машины циклического действия, машины непрерывного действия. Машины непрерывного действия имеют более высокую производительность на 1 квт мощности установленного двигателя, и поэтому их технико экономические показатели в 2— 2, 5 раза выше, чем у машин с той же мощностью двигателя, но с рабочим органом циклического действия.
; б —")
Рис. 2. 3. Рабочие органы основных землеройных машин: а – бульдозерный (одноотзалышй); б — одноковшовый; в — клиновый; г — плужный; д — многоковшовый цепной; е — многоковшовый роторный; ж — фрезерный; з — бурильный (буровой)

Рис. 2. 4. Средства транспортировки грунта от рабочих органов землеройных машин на дневную поверхность: а и б — роторные метатели; в — ленточный транспортер

3. Общие сведения о рабочих процессах и параметрах.

Взаимодействие рабочих органов со средой включает несколько процессов (отделение среды от массива, транспортирование среды и динамические процессы в системе среда—рабочий орган), характеризующихся рядом кинематических, силовых и динамиче ских параметров. Процесс отделения сред (грунта, древесины, льда, снега) от массива осуществляется рабочим инструментом, который, взаимодействуя со средой, совершает простейшее прямолинейное движение с кинематическими параметрами скорости и (ускорения перемещения (у бульдозерных рабочих органов путепрокладчиков и машин разграждения, у ножевых тралов и минных заградителей) или сложное движение с различными траекториями перемещения (у траншейных, котлованных, бурильных машин и средств обра ботки древесины).

Рис. 3. 1. Геометрические и кинематические параметры рабочего инструмента: а — при прямолинейном движении; б — при сложном движении; ω— угловая скорость; αр — угол поворота рабочего инструмента; h — толщина стружки (глубина среза); vn — скорость подачи; ε — угол между окружной v 0 и абсолютной vа скоротями.

Таблица 3. 1

Рис. 3. 2. Процесс взаимодействия рабочего инструмента со средой.

Рис. 3. 3. Силы, действующие на рабочий ин струмент при его взаимодействии со средой

Таблица 3. 2. Формулы для определения силы сопротивления грунта резанию

Рис. 3. 4. Взаимо действие изношенного инструмента со средой
 бульдозерным рабочим органом: а—перемещение призмы перед")
Рис. 3. 5. Процесс транспортирования среды (грунта, смога) бульдозерным рабочим органом: а—перемещение призмы перед отвалом; б — перемещение призмы вдоль отвала; в — перемещение призмы вверх по отвалу.
;")
Рис. 3. 6. Процесс транспортирования грунта бесковшовым роторным рабочим органом: 1— обечайка (донный лист); 2 — кольца ротора; 3 — компрессионная кривая.

Динамические процессы. Рост производительности машин инженерного вооружения идет в основном за счет повышения скоростей выполнения рабочих операций, сокращения времени на пуск (разгон) и торможение (остановку) механизмов машин, что вызывает увеличение инерционных (динамических) нагрузок. Кроме того, при выполнении инженерных задач (отрывке траншей, котлова нов, прокладывании колонных путей, удалении мин из грунта, установке мин в грунт заградителями и др. ) рабочие органы ударяются о различные преграды, находящиеся в среде. В этих случаях происходит резкое замедление рабочего органа или машины в целом и, как результат этого, возникновение динамических нагрузок.

4. Классификация и характеристика приводов машин для земляных работ, предъявляемые к ним требования. Ходовое оборудование машин для земляных работ.

Ходовая часть машин для земляных работ состоит из дви жителя и подвески. Движитель – это механизм, с помощью которого машина опирается на поверхность, а крутящий момент, передаваемый от двигателя, реализуется в нем в силу тяги, позволяя машине преодолевать различные естественные и искусственные препятствия и сопротивления, возникающие на рабочем органе.

Рис. 4. 1. Схемы гусеничных движителей машин для земляных работ: а – БТМ-3; б – ИМР; в – ИМР-2 М; г – БАТ-2 и МДК-3; 1 – ведущее колесо; 2 - гусеничная цепь; 3 – опорный каток; 4 – направляющее колесо; 5 – поддерживающий каток

Ходовая часть машин для земляных работ состоит из движителя и подвески. Движитель – это механизм, с помощью которого машина опирается на поверхность, а крутящий момент, передаваемый от двигателя, реализуется в нем в силу тяги, позволяя машине преодолевать различные естественные и искусственные препятствия и сопротивления, возникающие на рабочем органе. Подвеской называются детали и механизмы, с помощью которых остов (корпус) машины соединяется с опорными катками или колесами. Она предназначена для смягчения толчков и уда ров, возникающих при движении машины, и тем самым достиже ния высокой транспортной скорости движения, меньшей утомляемости механика водителя и более благоприятной работы агрегатов машины.

Устройство ходовой части с независимой подвеской Рассмотрим устройство ходовой части изделий на базе АТ Т (409 У). Гусеничный движитель изделия имеет переднее расположение ведущих колес, приподнятые направляющие колеса, катки с наружной амортизацией, цельнометаллические гусеницы с открытым шарниром, разгруженный механизм натяжения гусениц кривошипного типа с червячным приводом. Подвеска независимая, торсионная, без амортизаторов.

Рис. 4. 2. Приспособление для самовытаскивания тягача: 1 колодка с заделанными концами троса; 2 трос; 3 – бревно.

Особенности устройства ходовой части изделий на базе МТ Т Рис. 4. 3. Ходовая часть изделия 453: 1 ведущее колесо; 2 корпус машины; 3, 6, 11 гидравлические амортизаторы; 4 опорный каток; 5 узел подвески; 7 упор; 8 поддерживающий каток; 9 балансир; 10 гусеница; 12 направляющее колесо

Особенности устройства ходовой части трактора ДЭТ 250 М Рис. 4. 4. Подвеска трактора ДЭТ 250 М: 1 торсионный вал; 2 труба балансира; 3 каток с балансиром

5. Классификация экскаваторов и их рабочее оборудование.

Историческая справка
 на базе трактора ХТЗ")
Рис. 5. 1. Экскаватор М 1 ДВ ( «Комсомолец» ) на базе трактора ХТЗ (1932 г. )
 (1937 1939)")
Рис. 5. 2. Одноковшовый экскаватор Д 0, 35 (экспериментальный вариант) (1937 1939)
 (модернизированный Э 255)")
Рис. 5. 3. Универсальный экскаватор Э 302 (1957 г. ) (модернизированный Э 255)
")
Рис. 5. 4. Войсковой одноковшовый экскаватор Э 305 БВ (1959 г. )
")
Рис. 5. 5. Войсковой гидравлический одноковшовый экскаватор ЭОВ – 4421 (1977 г. )

Экскаваторы одноковшовые войсковые Экскаватор одноковшовый войсковой ЭОВ-4521 ЭОВ-4421 ЭОВ-3521

Одноковшовый экскаватор самоходная землеройная машина с основным рабочим органом в виде одного ковша, производящая разработку (копание) и перемещение грунта (или сыпучих материалов) на сравнительно небольшие расстояния в отвал или в транспортное средство. Классификация экскаваторов по назначению (строительные, строительно карьерные, вскрышные, туннельные, шахтные); по числу двигателей (одно и многодвигательные); по типу привода (гидравлический, механический, гидромеханический, электрический, смешанный); по степени подвижности поворотной части (полноповоротные и неполноповоротные); по типу движителя (гусеничные, пневмоколесные, шагающие, плавучие); по типу подвески рабочего оборудования (жесткая, гибкая).

Индексация экскаваторов

Поворотная платформа является остовом для размещения на ней кабины экскаваторщика с приводами управления, основных механизмов двигателя, трансмиссии и рабочего оборудования. Она передает нагрузки с рабочего оборудования на ходовую часть ма шины через опорно поворотное устройство. Рабочее оборудование обеспечивает выполнение самых разнообразных земляных и погрузочно разгрузочных работ. В одноковшовых экскаваторах используются следующие виды рабочего оборудования: прямая лопата, обратная лопата, драглайн, грейфер, рыхлитель, планировщик, которые предназначены для выполнения различных земляных работ, а также крано вое, погрузочное, сваебойное и другие виды специального обору дования.
: ходовой части (базовой")
Одноковшовый экскаватор состоит из трех основных частей (рис. 5. 1): ходовой части (базовой машины), поворотной платформы и рабочего оборудования. Ходовая часть предназначена для восприятия и передачи на опорную площадку силы тяжести машины и сил взаимодействия рабочего органа с грунтом, стопорения машины в забое при ее работе, маневрирования экскаватора в забое и перемещения его между объектами. Она может быть гусеничной, колесной или пред ставлять собой специальное шасси.

По назначению одноковшовые экскаваторы бывают: строительные и строительно карьерные, имеющие обычно ковш вместимостью 0, 015 10 м 3 и массу 0, 25 250 т; карьерные с ковшом вместимостью 2 20 м 3 и массой 40 900 т; вскрышные с ковшом вместимостью 4 160 м 3 и массой 170 13000 т, предназначенные для добычи полезных ископаемых в горной промышленности и выполнения земляных работ больших объемов, например, в гидротехническом строительстве; туннельные и шахтные с уменьшенными размерами рабочего оборудования, с ковшами вместимостью 0, 5 1 м 3 и массой 15 30 т, предназначенные для подземных работ.

По типу привода различают экскаваторы с гидравлическим, механическим, гидромеханическим, электрическим и смешанным приводами. Название привода обычно соответствует примененной передаче. По степени подвижности поворотной части экскаваторы делятся на полноповоротные, когда поворотная платформа относительно ходового оборудования может вращаться на 3600, и неполноповоротные. По типу механизма передвижения экскаваторы разделяются на гусеничные, пневмоколесные, шагающие, на специальном шасси, на базе тракторов, автомобилей и плавучие. К экскаваторам на специальном шасси относятся машины, имеющие колесный движитель автомобильного типа.

По числу установленных двигателей экскаваторы бывают: однодвигательные, многодвигательные. В первом случае привод является однодвигательным, и энергия от него передается к элементами рабочего оборудования и механизмам через несколько разветвляющихся трансмиссий. Во втором случае элементы рабочего оборудования и механизмы приводятся от нескольких двигателей. Причем, если каждое рабочее движение элементов оборудования или механизмов осуществляется от отдельного двигателя, то экскаватор называют экскаватором с индивидуальным приводом, а если каждый из двигателей машины приводят в движение несколько ее основных механизмов – экскаваторы с групповым приводом.
 и гибкой (канатной)")
По типу подвески рабочего оборудования различают экскаваторы с жесткой (гидравлические) и гибкой (канатной) подвеской. У гидравлического экскаватора рабочее оборудование выполнено из шарнирно связанных элементов, которые могут поворачиваться как один относительно другого, так и относительно поворотной платформы в вертикальной плоскости. Передача энергии от силовой установки к элементам рабочего оборудования осуществляется посредством жидкости, перемещающейся по трубопроводам. Конечные звенья привода в этом случае обычно представляют собой гидроцилиндры с поршнями и штоками. В канатных экскаваторах энергия от силовой установки – двигателя к элементам рабочего оборудования передается с помощью механических передач. Конечные звенья выполнены в основном в виде канатов

Рис. 5. 6. Гусеничный полноповоротный экскаватор с гибкой подвеской и с оборудованием прямой лопатой

Рис. 5. 7. Полноповоротный экскаватор с жесткой подвеской рабочего оборудования обратной лопаты на пневмоходу

Рис. 5. 8. Неполноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе колесного трактора

Рис. 5. 9. Полноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе автомобиля

По видам рабочего оборудования на строительных экскаваторах применяют рабочее оборудование: прямая лопата, обратная лопата, драглайн, планировочное, погрузочное, грейферное, крановое, копер и др. Помимо этого при каждом виде оборудования экскаваторы можно различать еще и в зависимости от формы или назначения рабочего органа или приспособления. Например, в зависимости от назначения и формы ковша их называют экскаватор с зачистным, профильным и т. п. ковшом. Строительные экскаваторы могут быть снабжены рабочим оборудованием и рабочими органами до 30 35 видов. В зависимости от геометрической вместимости ковша (0, 15; 0, 25; 0, 4; 0, 65; 1; 1, 6; 2, 5 м 3) экскаваторы делятся на семь размерных групп. Экскаваторы каждой размерной группы в соответствии с ГОСТ 17343 71 могут иметь различное ходовое оборудование: гусеничное или колесное. Строительные части широко используют на работах экскава торы пяти размерных групп (с ковшами вместимостью от 0, 15 до 1 м 3), а инженерные войска применяют 3 ю, 4 ю размерные группы.

Основные виды рабочего оборудования одноковшовых экскаваторов: • Обратная лопата • прямая лопата • погрузочное оборудование • грейфер • драглайн • оборудование для рыхления грунтов • сменные рабочие органы

Рис. 5. 10. Основные виды и исполнения рабочего оборудования 1 прямая лопата; 2 маятниковая прямая лопата; 3 напорная прямая лопата; 4 прямая лопата со створчатым ковшом; 5 обратная лопата; 6 боковая обратная лопата; 7 погрузочное оборудование; 8 планировочное оборудование; 9 землеройно планировочное оборудование с телескопической стрелой; 10 землеройно планировочное оборудование со смещаемой осью копания; 11 драглайн; 12 боковой драглайн; 13 канатный грейфер; 14 жесткий грейфер; 15 крановое оборудование; 16 копер

Рис. 5. 11. Неполноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе колесного трактора

Обратная лопата применяется для разработки грунтов, расположенных ниже уровня стояния машины и является основным видом ра бочего оборудования для экскаваторов. При работе обратной лопатой улучшается наполнение ковша и точность выгрузки в результате его поворота относительно рукояти, появляется возможность широкого применения удлиненных стрел и рукоятей, а также про фильных ковшей для рытья и очистки каналов, кюветов. Рабочий цикл включает следующие операции: копание грунта, поворот на разгрузку, разгрузка, поворот в забой, возврат рукояти с ковшом на забой

Основные сборочные единицы обратной лопаты составная стрела, состоящая из основной и удлиняющей частей или неразъемная Г образная унифицированная стрела; рукоять ; ковш; гидроцилиндры подъема стрелы, поворота рукояти и ковша.

Рис. 5. 12. Обратная лопата. • Вместимость ковша, м 3. . . . 0, 65 • Глубина копания котлованов (траншей), м: шириной до 2, 5 м по дну. . . . 3, 25 шириной до 4, 5 м по дну. . . . 2, 00 • Наибольший радиус копания на уровне стоянки, м. . . 6, 83 • Наибольший радиус копания, м. . . 7, 40 • Наибольшая высота выгрузки в транспортные средства, м…………………………… 4, 48 • Наибольшее усилие копания, к. Н. . . . . 91, 00 • Продолжительность рабочего цикла, с. . . . 20, 00 • Техническая производительность, м 3/ч. . . . 125, 00
 и обратная (б)")
Рис. 5. 13. Схемы работы одноковшового экскаватора рабочим оборудованием прямая (а) и обратная (б) лопата

Рис. 5. 14. Рабочее оборудование обратной лопаты с составной стрелой и схемы расположения гидроцилиндров для привода стрелы ( I III), рукояти (IV), и ковша (V и VI)
, выдвижной (б) и поворотной")
Рис. 5. 15. Схемы составных стрел экскаваторов с невыдвижной (а), выдвижной (б) и поворотной (в) верхней их частью

Рис. 5. 16. Рабочее оборудование обратной лопаты с моноблочной стрелой

Прямая лопата Прямую лопату гидравлических экскаваторов широко применяют на экскаваторах 4 й размерной группы, а так же машинах большей мощности для разработки грунтов, расположенных выше уровня стояния экскаватора Основными составными частями ее являются: стрела, рукоять, ковш, гидроцилиндры подъема стрелы, поворота рукояти и поворота ковша.

Рис. 5. 17. Одноковшовый гидравлический экскаватор с рабочим оборудованием прямая лопата
 предназначен для разработки грунтов и погрузки сыпучих")
Погрузочное оборудование Экскаватор с погрузочным оборудованием (погрузчиком) предназначен для разработки грунтов и погрузки сыпучих и дробленых материалов выше уровня стоянки машины. Как и у прямой лопаты, погрузчик работает движением ковша от себя (от машины в сторону забоя или отвала материалов). Вместимость ковша погрузочного оборудования обычно в 1, 5. . 2 раза больше вместимости копающего ковша прямой лопаты. Кинематическая схема погрузочного оборудования обеспечива ет движение режущей кромки ковша по прямолинейной горизонтальной траектории на уровне стоянки на длине от 2 м и более. Это позволяет планировать площадку, на которой стоит машина. Дру гое отличие погрузчика от обратной лопаты — возможность поворота ковша после внедрения его в разрабатываемый материал.
 и схема его работы (б)")
Рис. 5. 18. Погрузочное оборудование экскаваторов (а) и схема его работы (б)

Грейфер На экскаваторах с гидравлическим приводом устанавливают жестко подвешенные грейферы. Основное преимущество жестко подвешенного грейфера по сравнению с канатным заключается в том, что им можно создать необходимое давление на грунт при врезании, т. е. независимо от массы грейфера эффективно раз рабатывать плотные грунты. Оборудование грейфера с составной стрелой состоит: из рукояти , используемой от обратной лопаты подвески ме ханизма поворота ковша гидроцилиндра для замыкания и открывания челюстей ковша

Рис. 5. 19. Оборудование грейфера

Драглайн Предназначен для разработки грунтов, расположенных ниже уровня стояния экскаватора и применяется для экскаваторов с гибкой (тросовой) подвеской рабочего оборудования. Рабочее оборудование драглайна состоит из стрелы, полиспаста, механизма подъема стрелы, ковша, подъемного каната, обоймы с блоком, тягового каната и наводящего устройства, Драглайн может использоваться при возведении земляных плотин, дамб, валов, для отрывки осушительных и дренажных каналов и при устройстве подъездов к мостам и переправам

Рис. 5. 20. Схемы работы одноковшового экскаватора с землеройным рабочим

Оборудование для рыхления грунтов • Однозубый рыхлитель • оборудование захватно клещевого типа • Гидромолот Экскаватор с рабочим оборудованием однозубого рыхлителя предназначен для разрушения мерзлых грунтов, разработки трещиноватых скал пород, взламывания асфальтового покрытия, выемки бордюрного камня, кор чевания пней. Рыхлитель устанавливают на рукояти обратной лопаты вместо ковша.

Сменное рабочее оборудование захватно клещевого типа предназначено для рыхления мерзлых грунтов, разборки старых зданий, взламывания и погрузки асфальтобетоных покрытий, снятия и ук ладки дорожных плит, труб, установки колодцев. Поставляют его отдельными комплектами в двух исполнениях (с одно и трехзубым рыхлителем захватом) и устанавливают вместо ковша и рукояти обратной лопаты, составную стрелу 2 из двух частей оставляют.

Рис. 5. 21. Рабочее оборудование рыхлителя

• • Крюковая подвеска Грузоподъемность, т……. . . 3 Зуб - рыхлитель Наибольшая глубина рыхления за один проход, м. . …. . 0, 6 Наибольший радиус рыхления на уровне стоянки, м. . 6, 34 Наибольшее усилие внедрения зуба, к. Н. . . . ………. . … 62

Рис. 5. 22. Рабочее оборудование гидромолота

Экскаватор, оснащенный гидромолотом, применяют для разрушения мерзлого грунта, рыхления скальных пород, дробления негабаритов, разрушения старых фундаментов, взламывания дорожных покрытий и т. п. Гидромолот крепят к рукояти обратной лопаты экскаватора посредством переходного кронштейна с использованием деталей, применяемых для крепления ковша обратной лопаты. Подсоединение гидромолота к переходному кронштейну осу ществляется с помощью осей.

Гидромолот ГПМ 300 А • • • Эффективная мощность, к. Вт. . . . 8, 6 Энергия удара, к. Дж. . . . . 2, 94 Частота ударов, Гц. . . . . 3, 2 Наибольший радиус рыхления на уровне стоянки, м. . . . 6 Наименьший радиус рыхления на уровне стоянки, м. . . . 4, 2 Наибольшая глубина рыхления, м. . . 4, 6 Наибольшая высота рыхления, м. . . . 3, 2 Наибольшая глубина рыхления за один проход, м. . . . . 0, 5 Общая длина гидромолота, мм. . . . 2900

Сменные рабочие органы • Ковши обратной лопаты: ковши для работы в липких и влажных грунтах; ковши для планировочных и зачистных работ; погрузочные ковши; ковш с ребрами жесткости; • Бульдозерный отвал • Грейферные захватные рабочие органы

Рис. 5. 23. Сменные рабочие органы гидравлического экскаватора А, Б, В, Г ковши обратной лопаты; Д приспособление для захвата негабаритов; Е, Ж планировочный и зачистной ковши; З ковш прямой лопаты; И, К погрузочные ковши; Л грейферный ковш; М грейферный захват; Н профильный ковш; О рыхлитель; П крюковая подвеска; Р отвал

Обозначение экскаваторов ЭО 0000 Э экскаватор; О одноковшовый; В войсковой. Первая порядковая цифра от 1 до 7 обозначает размерную группу. Вторая порядковая цифра от 1 до 7 обозначает тип ходового устройства: 1 гусеничное; 2 гусеничное ускоренное; 3 пневмоколесное; 4 специальное шасси; 5 автомобильное; 6 тракторное; 7 прицепное. Третья порядковая цифра от 1 до 3 обозначает исполнение рабочего оборудования, тип подвески: 1 канатно тросовая; 2 жесткая с гидроцилиндрами; 3 телескопическая. Четвертая порядковая цифра порядковый номер модели.

Рис. 5. 24. ЭОВ 4421

Войсковой гидравлический одноковшовый экскаватор ЭОВ 4421 Экскаватор ЭОВ 4421 предназначен для механизации земляных и погрузочно разгрузочных работ при оборудовании позиций войск и пунктов управления. Экскаватор применяется для отрывки траншей и котлованов в грунтах 1 4 й категорий без рыхления, в мерзлых грунтах после их предварительного рыхления. Наличие крюковой подвески позволяет производить подъем, опускание и перемещение различных грузов.

Рис. 5. 25. Экскаватор ЭОВ 4421

Основные части экскаватора ЭОВ 4421 • базовая машина • обвязочная рама • выносные опоры • опорно поворотное устройство • поворотная платформа • силовая установка • рабочее оборудование • гидропривод • приводы (органы) управления • электрооборудование

В качестве базовой машины используется автомобиль Кр. АЗ 255 Б, который подвергнут доработкам. Доработки шасси базового автомобиля обусловлены необходимостью снижения его массы и монтажа обвязочной рамы. С этой целью с автомобиля сняты лебедка, задний буксирный прибор и правый топливный бак, укорочены лонжероны рамы. В местах крепления обвязочной рамы к раме автомобиля в лонжероны рамы вварены ребра жесткости. В передней части рамы установлена стойка для крепления рабочего оборудования в транспортном положении. В связи с установкой обвязочной рамы изменено место расположения ресиве ров, доработаны невмосистема п и электрооборудование автомобиля. Левый (по ходу) топливный бак перенесен на обвязочную раму. Контейнер запасного колеса установлен в передней части обвязочной рамы. К кормовой части базового автомобиля крепится фара для освещения местности при передвижении задним ходом.

Обвязочная рама предназначена для установки опорно поворотного устройства и разгрузки (совместно с выносны ми опорами) ходовой части автомобиля. Рама представляет собой штампосварную конструкцию. Основными элементами рамы являются две продольные балки, соединенные рядом поперечных вставок. Продольные балки заканчиваются с двух сторон кронштейнами и для крепления выносных опор и их гидроцилиндров. На верхней части рамы расположена обечайка с привалочной поверхностью для установки опорно поворотного устройства. Для увеличения жесткости конструкции кронштейны передних вынос ных опор соединены стяжкой.
 ходовой части автомобиля и")
Выносные опоры предназначены для разгрузки (совместно с обвязочной рамой) ходовой части автомобиля и создания необходимой устойчивости машины при разработке грунта и выполнении погрузочно разгрузочных работ. Все четыре опоры представляют собой объемные сварные конструкции, имеющие отверстия для связи посредством пальцев с обвязочной рамой и корпусом гидроцилиндра. В рабочем положении выносные опоры находятся в контакте с грунтом, при этом средний и задний мосты разгружены, а экскаватор вывешивается на четырех опорах и двух передних колесах, что повышает его устойчивость и позволяет создать значительное (до 91 к. Н) усилие на режущей кромке ковша. В транспортном положении штоки гидроцилиндров втянуты, а опоры подняты.

Опорно поворотное устройство предназначено для осуществления вращения поворотной платформы относительно базовой машины, а также для передачи рабочих усилий с поворотной платформы на обвязочную раму. Опорно поворотное устройство состоит: из колец, стянутых болтами, роликов, зубчатого венца. Шестерня гидромотора поворота входит в зацепление с зубчатым венцом. К верхней полуобойме кольца с помощью болтов крепится поворотная платформа.

Поворотная платформа предназначена для размещения на ней силовой установки, основных элементов гидросистемы, органов управления, кабины экскаваторщика и рабочего оборудования. Она служит остовом, воспринимающим все нагрузки, возникающие при работе экскаватора, и через опорно поворотное устройство опирается на обвязочную раму. Платформа представляет собой сварную конструкцию, выполненную совместно с топливным баком, инструментальными ящиками и со сливным баком гидросистемы, на верхнюю полость которого устанавливаются гидрораспределители. В передней части платформы расположены кронштейны для шарнирной установки на них стрелы рабочего оборудования и металлическая плита для размещения на ней элементов управления, кабины и сиденья. К поворотной платформе крепятся облицовочные щитки.

Силовая установка является источником энергии для рабочего оборудования и состоит из четырехтактного четырехцилиндрового дизеля жидкостного охлаждения с вихревой камерой сгорания и обслуживающих его систем: питания топливом и воздухом, смазки, охлаждения и пуска. Номинальная мощность двигателя (СМД 14) 55 к. Вт. Для пуска дизельного двигателя имеется одноцилиндровый двухтактный пусковой двигатель ПД 10 У с редуктором СМД 8 19 С 4 В. Пуск двигателя ПД 10 У осуществляется эле тростартером СТ 350. Для облегчения пуска дизеля при пониженной температуре окружающего воздуха предусмотрен электрофакельный предпусковой подогреватель.

Рабочее оборудование представляет собой обратную лопату и состоит из унифицированной стрелы, рукояти, ковша, крюковой подвески, гидроцилиндра ковша, гидроцилиндра рукояти, двух гидроцилиндров стрелы, трубопроводов и рукавов высокого давления. Стрела, рукоять и ковш соединены между собой шарнирно с помощью пальцев и бронзовых втулок, представляющих собой подшипники скольжения. Подъем и опускание стрелы, поворот рукояти и ковша в вертикальной плоскости осуществляются гидроцилиндрами.

Гидропривод предназначен для перевода рабочего оборудования из транспортного положения в рабочее и обратно, . осуществления всех рабочих операций оборудования при выполне нии земляных и погрузочно разгрузочных работ, а также подъема и опускания выносных опор. Основными частями гидропривода являются гидробак, два гидрофильтра, гидронасос, гидромотор, четыре гидроцилиндра рабочего оборудования, четыре гидроцилиндра и выносных опор, масляный радиатор, центральный коллектор, гидрораспределительная и клапанная аппаратура, трубопроводы и рукава высокого давления. Приводы управления расположены в кабине экскаваторщика и включают рычаг управления подачей топлива, рычаг управления стрелой и ковшом, рычаг управления поворотом платформы, два рычага управления левыми и правыми выносными опорами, две педали управления рукоятью и фиксатор для стопорения поворотной платформы.

Электрооборудование экскаватора работает под напряжением 12 В. Оно размещено на поворотной платформе и состоит из ис точников и потребителей электрической энергии, вспомогательной аппаратуры, контрольно измерительных приборов, электропроводов. Источником электроэнергии являются аккумуляторная батарея 6 ТСТ 50 ЭМС и генератор, работающие совместно с реле регулятором. К потребителям электроэнергии относятся: электростартер СТ 350, электролампы освещения, электродвигатели вентилятора и стеклоочистителя и звуковой сигнал. К контрольноизмерительным приборам относятся: амперметр, указатели температур рабочей жидкости гидросистемы и системы охлаждения.

Тактико-техническая характеристика экскаватора ЭОВ-4421 Техническая производительность в грунтах 1 й, 1 й категорий при отрывке: котлованов, м 3/ч. . . . 90 – 100 траншей, м/ч. . . . 70 – 90 Максимальная транспортная скорость, км/ч . . . 70 Масса, т . . 20 Расчет, человек . . 2 Железнодорожный габарит. . . 02 Т Время развертывания, мин . . . . 2 Расход топлива на 100 км пути, л: . . 40 Запас хода по топливу, км. . . 500 Максимальная глубина отрываемого котлована при ширине по дну, м: 2, 4 м. . . . . 3, 25 4 м. . . 2 Вместимость ковша, м 3. . . . 0, 65 Среднее время цикла, с. . . 14 – 18 Максимальное усилие резания, к. Н. . . . . 91

Рис. 5. 26. Экскаватор Э 305

Рис. 5. 27. Экскаватор Э 305

6. Компоновка и общее устройство котлованных машин.

Войсковые котлованные машины предназначаются для отрывки котлованов под блиндажи, убежища и отрывки котлованных укрытий для боевых и транспортных машин. ПО ОСНОВНЫМ ПОКАЗАТЕЛЯМ (ПРОИЗВОДИТЕЛЬНОСТИ, УДЕЛЬНОЙ ЭНЕРГОЕМКОСТИ И ДР. ) ВОЙСКОВЫЕ КОТЛОВАННЫЕ МАШИНЫ ВЫГОДНО ОТЛИЧАЮТСЯ ОТ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ И БУЛЬДОЗЕРОВ. По размещению движителей во время отрывки котлована все котлованные машины разделяются на две группы: а) на машины с постоянным размещением движителей на дневной поверхности и б) на машины с размещением движителей на дне отрываемого котлована (рис. 6. 1). По типу движителей войсковые котлованные машины разделяются на колесные и гусеничные.

Рис. 6. 1. Отрывка котлована многопроходной котлованной машиной

Рабочим органом войсковой котлованной машины, производящим разработку грунта, может быть фреза поперечного или продольного копания, а также тяговые цепи с закрепленными на них режущими периметрами и выгребными лопатками.

Рис. 6. 2. Схемы рабочих органов войсковых котлованных машин: а фреза поперечного копания; б фреза продольного копания; в цепной; г бульдозерный с активным отвалом.

КОМПОНОВОЧНЫЕ И КИНЕМАТИЧЕСКИЕ СХЕМЫ КОТЛОВАННЫХ МАШИН Компоновочная схема котлованной машины определяется конструкцией ее рабочего органа и положением движителей во время отрывки котлована. В настоящее время известны пять компоновочных схем войсковых котлованных машин, которые. однако, не исчерпывают всех возможных вариантов компоновки.

Рис. 6. 3. Компоновочные схемы войсковых котлованных машин: а, б — компоновки котлованных машин с движением гусениц (или колес) во время отрывки котлованов по дневной поверхности; в, г, д — с движением гусениц по дну отрываемого котлована

Рис. 6. 4. Котлованная машина МДК 2. Транспортное положение

Рис 6. 5. Схема быстроходной траншейной машины БТМ 3 в рабочем положении

Быстроходная траншейная машина БТМ-3 Котлованная машина МДК-3
Lektsia__2 готовое.ppt