

2-Lek_AUIS_2012.ppt
- Количество слайдов: 75
 Автоматизированные информационно-управляющие системы Доц. каф. АПП Кульчицкий Александрович doz-ku@rambler. ru
Автоматизированные информационно-управляющие системы Доц. каф. АПП Кульчицкий Александрович doz-ku@rambler. ru
 Лекция 2 Структура и основные виды АУИС
Лекция 2 Структура и основные виды АУИС
 Обобщенная структурная схема ИИС
Обобщенная структурная схема ИИС
 • Под информацией понимаем некоторую совокупность сведений, представляющих интерес для человека или полезных для функционирования интеллектуальных систем. • При получении информации (человеком или системой) возникает потребность ее обработки. • Условие воздействия помех и отсутствия полной информации является чрезвычайно важным в проблеме понимания необходимости применения обработки, а следовательно, и информационно-измерительных систем (ИИС), одной из основных задач которых является обработка информации.
• Под информацией понимаем некоторую совокупность сведений, представляющих интерес для человека или полезных для функционирования интеллектуальных систем. • При получении информации (человеком или системой) возникает потребность ее обработки. • Условие воздействия помех и отсутствия полной информации является чрезвычайно важным в проблеме понимания необходимости применения обработки, а следовательно, и информационно-измерительных систем (ИИС), одной из основных задач которых является обработка информации.
 Основные виды ИИС • • Системы автоматического контроля, Системы технической диагностики, Системы опознания образов, Телеизмерительные системы.
Основные виды ИИС • • Системы автоматического контроля, Системы технической диагностики, Системы опознания образов, Телеизмерительные системы.
 Системы автоматического контроля • Служат для установлении соответствия между состоянием объекта и заданной нормой и в выработке суждения о данном или (и) о будущем состоянии объекта. С помощью таких систем измеряются физические величины, характеризующие состояние объекта, и результаты измерений сравниваются со значениями, принятыми в качестве нормы. При этом промежуточные результаты измерений, используемые для выработки суждений, могут и не поступать на выход системы. С этой точки зрения контроль является операцией "сжатия" данных, устранения ненужных в данном случае сведений об объекте. Для выработки суждения о будущем состоянии объекта система контроля должна выполнять прогнозирование на основе сведений о предыдущих состояниях объекта, полученных в ходе измерений, а также на основе его динамических характеристик, известных благодаря проведенным ранее исследованиям.
Системы автоматического контроля • Служат для установлении соответствия между состоянием объекта и заданной нормой и в выработке суждения о данном или (и) о будущем состоянии объекта. С помощью таких систем измеряются физические величины, характеризующие состояние объекта, и результаты измерений сравниваются со значениями, принятыми в качестве нормы. При этом промежуточные результаты измерений, используемые для выработки суждений, могут и не поступать на выход системы. С этой точки зрения контроль является операцией "сжатия" данных, устранения ненужных в данном случае сведений об объекте. Для выработки суждения о будущем состоянии объекта система контроля должна выполнять прогнозирование на основе сведений о предыдущих состояниях объекта, полученных в ходе измерений, а также на основе его динамических характеристик, известных благодаря проведенным ранее исследованиям.
 Системы технической диагностики • Контролируют состояния различных технических устройств, в том числе устройств автоматики, вычислительной техники, радиотехники. Предназначены для обнаружения их отказов и определении неисправных элементов. Для таких систем характерно применение специальных методов поиска неисправностей.
Системы технической диагностики • Контролируют состояния различных технических устройств, в том числе устройств автоматики, вычислительной техники, радиотехники. Предназначены для обнаружения их отказов и определении неисправных элементов. Для таких систем характерно применение специальных методов поиска неисправностей.
 • Системы опознания образов. Их функция состоит в определении соответствия между исследуемым объектом и заданным образом. • Телеизмерительные системы – систем автоматического контроля, в которых информация о значениях измеряемых величин передается на большие расстояния - от сотен метров до тысячи километров. Для передачи по протяженным проводным или радиоканалам связи применяются специальные преобразования сигналов, рассчитанные на достижение достаточной точности и достоверности, несмотря на искажения под действием помех, а также на подключение большого числа источников и приемников информации к одному каналу. При этом на выбор технических решений существенно влияет ограниченная пропускная способность каналов связи.
• Системы опознания образов. Их функция состоит в определении соответствия между исследуемым объектом и заданным образом. • Телеизмерительные системы – систем автоматического контроля, в которых информация о значениях измеряемых величин передается на большие расстояния - от сотен метров до тысячи километров. Для передачи по протяженным проводным или радиоканалам связи применяются специальные преобразования сигналов, рассчитанные на достижение достаточной точности и достоверности, несмотря на искажения под действием помех, а также на подключение большого числа источников и приемников информации к одному каналу. При этом на выбор технических решений существенно влияет ограниченная пропускная способность каналов связи.
 Основными признаки классификации ИИС • область применения • по функциональным возможностям системы (сложности обработки информации); • способ комплектования; • Структура; • виды входных сигналов; • виды измерений; • режим работы; • функциональные свойства компонентов.
Основными признаки классификации ИИС • область применения • по функциональным возможностям системы (сложности обработки информации); • способ комплектования; • Структура; • виды входных сигналов; • виды измерений; • режим работы; • функциональные свойства компонентов.
 • По области применения ИИС делят на группы: – для научных исследований, – для испытаний и контроля сложных изделий: – для управления технологическими процессами. • По способу комплектования: – агрегатированные (Агрегатированные ИИС, как правило, включают универсальное ядро – ИВК, на основе которого, используя датчики различных физических величин можно строить ИИС различного назначения). – неагрегатированные, состоящие из компонентов, специально разработанных для конкретных систем.
• По области применения ИИС делят на группы: – для научных исследований, – для испытаний и контроля сложных изделий: – для управления технологическими процессами. • По способу комплектования: – агрегатированные (Агрегатированные ИИС, как правило, включают универсальное ядро – ИВК, на основе которого, используя датчики различных физических величин можно строить ИИС различного назначения). – неагрегатированные, состоящие из компонентов, специально разработанных для конкретных систем.
 • По структурным признакам: – системы параллельно-последовательной структуры. Основным признаком такой структуры служит наличие измерительного коммутатора циклически коммутируемого с множеством датчиков, – системы параллельной структуры, включающие множество одновременно работающих каналов, выходные системы которых преобразуются функциональным единым преобразователем и обрабатываются в одном вычислительном устройстве.
• По структурным признакам: – системы параллельно-последовательной структуры. Основным признаком такой структуры служит наличие измерительного коммутатора циклически коммутируемого с множеством датчиков, – системы параллельной структуры, включающие множество одновременно работающих каналов, выходные системы которых преобразуются функциональным единым преобразователем и обрабатываются в одном вычислительном устройстве.
 Типичная компьютерная система сбора данных
Типичная компьютерная система сбора данных
 Архитектура распределенной системы промышленной автоматизации на основе общей шины Пример архитектуры распределенной системы сбора данных и управления на модулях Real. Lab!
Архитектура распределенной системы промышленной автоматизации на основе общей шины Пример архитектуры распределенной системы сбора данных и управления на модулях Real. Lab!
 Типовая современная распределенная система автоматизации, включающая три уровня иерархии
Типовая современная распределенная система автоматизации, включающая три уровня иерархии
 Технологии NI – Интегрированная аппаратная платформа PXI Modular Instrumentation High-Speed High-Resolution Multifunction Dynamic Instrument Digitizers and DMMs Data Acquisition Signal Acquisition Control Signal Conditioning and Switching Unit Under Test Digital I/O Laptop PC Desktop PC Counter/ Timers Machine Vision Motion Control Distributed I/O and Embedded Control PDA
Технологии NI – Интегрированная аппаратная платформа PXI Modular Instrumentation High-Speed High-Resolution Multifunction Dynamic Instrument Digitizers and DMMs Data Acquisition Signal Acquisition Control Signal Conditioning and Switching Unit Under Test Digital I/O Laptop PC Desktop PC Counter/ Timers Machine Vision Motion Control Distributed I/O and Embedded Control PDA
 Рассмотрим три типичные ситуации: 1. Перед анализом полезной информации необходимо зафиксировать факт ее поступления. В этом случае задача обработки состоит в определении факта поступления полезной информации (задача обнаружения). 2. Поступающие данные помимо полезной составляющей (информационная компонента) содержат некоторую дополнительную искажающую составляющую (в технике говорят помеху), которая мешает правильно выделить полезную часть. Задача часто осложняется тем, что полные сведения о помехе отсутствуют. В данном случае задача обработки состоит в наиболее полном исключении помехи (задача выделения). 3. Для принятия какого-либо решения (то есть факт поступления информации зафиксирован, полезный сигнал выделен) необходим анализ полученной информации, причем в полученной информации может не быть всего необходимого, чтобы решение можно было принять с полной уверенностью. В данном случае задача обработки состоит в осуществлении такого анализа информации, чтобы решение было наиболее правильным (задача принятия решения).
Рассмотрим три типичные ситуации: 1. Перед анализом полезной информации необходимо зафиксировать факт ее поступления. В этом случае задача обработки состоит в определении факта поступления полезной информации (задача обнаружения). 2. Поступающие данные помимо полезной составляющей (информационная компонента) содержат некоторую дополнительную искажающую составляющую (в технике говорят помеху), которая мешает правильно выделить полезную часть. Задача часто осложняется тем, что полные сведения о помехе отсутствуют. В данном случае задача обработки состоит в наиболее полном исключении помехи (задача выделения). 3. Для принятия какого-либо решения (то есть факт поступления информации зафиксирован, полезный сигнал выделен) необходим анализ полученной информации, причем в полученной информации может не быть всего необходимого, чтобы решение можно было принять с полной уверенностью. В данном случае задача обработки состоит в осуществлении такого анализа информации, чтобы решение было наиболее правильным (задача принятия решения).
 Обобщенная структура автоматизированной информационноуправляющей системы
Обобщенная структура автоматизированной информационноуправляющей системы
 Задачи АИУС - автоматизированный синхронный ввод в ПК сигналов, регистрируемых группой датчиков; - вывод аналоговых сигналов в соответствии с аналитической моделью (например для калибровки); - обработка записанных на жесткий диск данных с помощью методов цифровой обработки сигналов для изучения состояния физических объектов и исследования протекающих процессов; - графическое представление регистрируемой информации и результатов анализа; - хранение экспериментальных данных и результатов обработки - управление процессом сбора данных.
Задачи АИУС - автоматизированный синхронный ввод в ПК сигналов, регистрируемых группой датчиков; - вывод аналоговых сигналов в соответствии с аналитической моделью (например для калибровки); - обработка записанных на жесткий диск данных с помощью методов цифровой обработки сигналов для изучения состояния физических объектов и исследования протекающих процессов; - графическое представление регистрируемой информации и результатов анализа; - хранение экспериментальных данных и результатов обработки - управление процессом сбора данных.
 Программное обеспечение должно выполнять следующие функции · настройка параметров и запуск процедуры сбора данных; · запись собираемых данных в оперативную память или на жесткий диск с отображением характера регистрируемых сигналов и временного изменения параметров на экране дисплея; · графический пользовательский интерфейс со средствами функциональной помощи; · реализация вычислительных алгоритмов цифровой обработки сигналов с отображением результатов комбинированными средствами представления информации; · выполнение калибровки передаточных характеристик физикоинформационных преобразователей и аналоговых цепей; · поддержка базы экспериментальных данных о характеристиках объектов испытаний (или исследуемых явлений).
Программное обеспечение должно выполнять следующие функции · настройка параметров и запуск процедуры сбора данных; · запись собираемых данных в оперативную память или на жесткий диск с отображением характера регистрируемых сигналов и временного изменения параметров на экране дисплея; · графический пользовательский интерфейс со средствами функциональной помощи; · реализация вычислительных алгоритмов цифровой обработки сигналов с отображением результатов комбинированными средствами представления информации; · выполнение калибровки передаточных характеристик физикоинформационных преобразователей и аналоговых цепей; · поддержка базы экспериментальных данных о характеристиках объектов испытаний (или исследуемых явлений).
 Принципы, используемые при разработке программного обеспечения АУИС • модульность, • использование объектной метафоры в управлении, • унификация связей, • разделение программ управления, графической поддержки, обработки и доступа к базе данных.
Принципы, используемые при разработке программного обеспечения АУИС • модульность, • использование объектной метафоры в управлении, • унификация связей, • разделение программ управления, графической поддержки, обработки и доступа к базе данных.
 Устройства сбора данных • • Устройства аналогового ввода/вывода Устройства цифрового ввода/вывода Счётчики/таймеры Многофункциональные устройства, поддерживающие аналоговые и цифровые операции, а также возможности счётчиков
Устройства сбора данных • • Устройства аналогового ввода/вывода Устройства цифрового ввода/вывода Счётчики/таймеры Многофункциональные устройства, поддерживающие аналоговые и цифровые операции, а также возможности счётчиков
. Частота") Основные параметры аналоговых устройств ввода • • • Количество каналов (симметричных и несимметричных). Частота оцифровки. Разрешение АЦП Диапазон измерений. Ширина кода • При диапазоне от 0 до 10 В и усилении 100, идеальная ширина кода определяется следующим выражением: • 10 / ( 100 * 216) = 1, 5 мк. В дифференциальную нелинейность, относительную точность, время установления измерительного усилителя параметры шума.
Основные параметры аналоговых устройств ввода • • • Количество каналов (симметричных и несимметричных). Частота оцифровки. Разрешение АЦП Диапазон измерений. Ширина кода • При диапазоне от 0 до 10 В и усилении 100, идеальная ширина кода определяется следующим выражением: • 10 / ( 100 * 216) = 1, 5 мк. В дифференциальную нелинейность, относительную точность, время установления измерительного усилителя параметры шума.
 Сравнительные характеристики устройств сбора данных Звуковая карта* NI USB DAQ NI PCI DAQ Приборы* AI полоса пр 8– 44 KS/s 10– 200 KS/s 250 K– 1. 2 Ms/s 20 k. S/s– 2 GS/s Точность 12– 16 bit 14– 18 bit 12– 24 bit Портатив. x x — some AI каналы 2 8– 16 16– 80 2 AO каналы 2 1– 2 2– 4 0 AC or DC AC AC/DC Запуск — x x x Калибровка — x x x
Сравнительные характеристики устройств сбора данных Звуковая карта* NI USB DAQ NI PCI DAQ Приборы* AI полоса пр 8– 44 KS/s 10– 200 KS/s 250 K– 1. 2 Ms/s 20 k. S/s– 2 GS/s Точность 12– 16 bit 14– 18 bit 12– 24 bit Портатив. x x — some AI каналы 2 8– 16 16– 80 2 AO каналы 2 1– 2 2– 4 0 AC or DC AC AC/DC Запуск — x x x Калибровка — x x x
 Типовая структура устройства сбора информации устройства USB 6008
Типовая структура устройства сбора информации устройства USB 6008
 Блок диаграмма платы PCI-6023 E
Блок диаграмма платы PCI-6023 E
 Упрощенная блок-схема модуля вводавывода
Упрощенная блок-схема модуля вводавывода
 • Буферная память предназначена для обеспечения обмена данными с компьютером без потери отсчетов с максимальной скоростью (реализована схема поочередного считывания данных из буферов). • Цифровой регистр представляет собой 16 -разрядный цифровой порт вывода общего назначения с тремя состояниями выхода и предназначен для управления внешними устройствами. • Блок старта предназначен для определения (путем программирования) начала ввода данных. • Таймер синхронизируется от кварцевого генератора и задает временную диаграмму ввода и вывода данных. • · Регистр режимов управляет режимами работы блоков модуля. • · Интерфейсы системной и локальной шин обеспечивают обмен с компьютером и с дополнительными модулями на базе цифровых процессоров сигналов. • · Конвертор питания обеспечивает прецизионным питанием +/-15 V аналоговые цепи модуля.
• Буферная память предназначена для обеспечения обмена данными с компьютером без потери отсчетов с максимальной скоростью (реализована схема поочередного считывания данных из буферов). • Цифровой регистр представляет собой 16 -разрядный цифровой порт вывода общего назначения с тремя состояниями выхода и предназначен для управления внешними устройствами. • Блок старта предназначен для определения (путем программирования) начала ввода данных. • Таймер синхронизируется от кварцевого генератора и задает временную диаграмму ввода и вывода данных. • · Регистр режимов управляет режимами работы блоков модуля. • · Интерфейсы системной и локальной шин обеспечивают обмен с компьютером и с дополнительными модулями на базе цифровых процессоров сигналов. • · Конвертор питания обеспечивает прецизионным питанием +/-15 V аналоговые цепи модуля.
 MAX - Measurement & Automation Explorer • MAX - Measurement & Automation Explorer. • MAX конфигурирует и отображает все устройства National Instruments- DAQ, PCI/PXI instruments, GPIB, IMAQ, IVI, Motion, VISA, and VXI devices. • Окно для конфигурации и тестирования.
MAX - Measurement & Automation Explorer • MAX - Measurement & Automation Explorer. • MAX конфигурирует и отображает все устройства National Instruments- DAQ, PCI/PXI instruments, GPIB, IMAQ, IVI, Motion, VISA, and VXI devices. • Окно для конфигурации и тестирования.
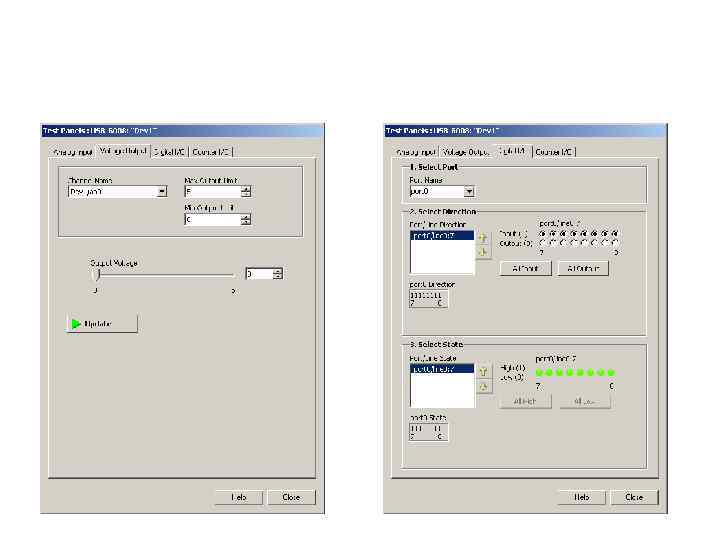
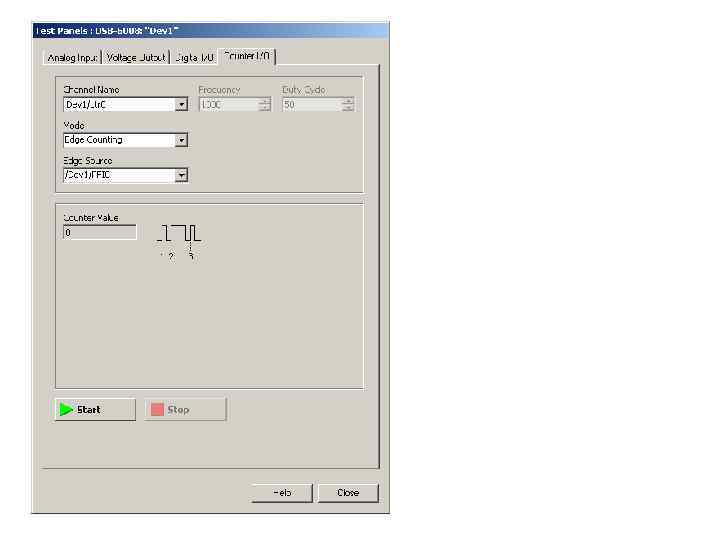
") Конфигурирования и тестирования платы сбора данных (DAQ)
Конфигурирования и тестирования платы сбора данных (DAQ)
 Типы сигналов
Типы сигналов
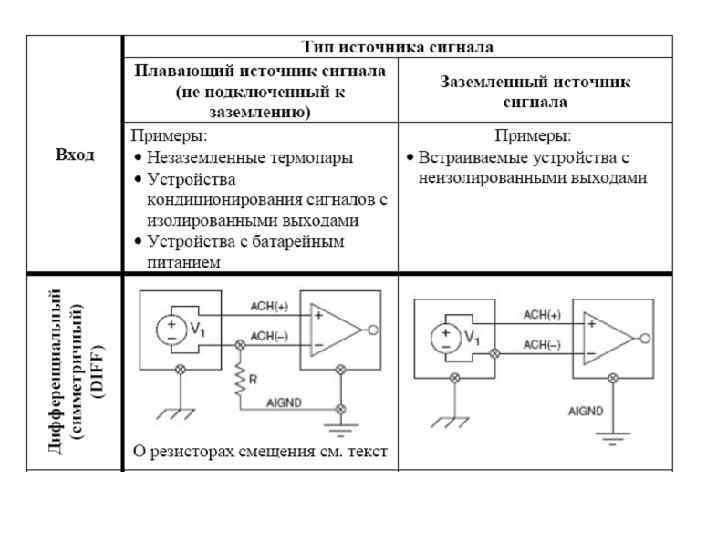
 Виды источников сигналов Заземленный Незаземленный
Виды источников сигналов Заземленный Незаземленный
 Для увеличения отношения сигнал/помеха усиление сигнала производится непосредственно у источника
Для увеличения отношения сигнал/помеха усиление сигнала производится непосредственно у источника
 Коэффициент подавления синфазного сигнала KD и KCM – коэффициенты усиления разностного и синфазного сигналов соответственно. Схема измерения коэффициента подавления синфазного сигнала, определяемого в d. B как:
Коэффициент подавления синфазного сигнала KD и KCM – коэффициенты усиления разностного и синфазного сигналов соответственно. Схема измерения коэффициента подавления синфазного сигнала, определяемого в d. B как:
 Измерительная система с дифференциальными входами Instrumentation amplifier – инструментальный усилитель Напряжение синфазного сигнала
Измерительная система с дифференциальными входами Instrumentation amplifier – инструментальный усилитель Напряжение синфазного сигнала
 Схемы с несимметричными входами Заземленная измерительная система с несимметричными входами Система с незаземленными несимметричными входами (NRSE)
Схемы с несимметричными входами Заземленная измерительная система с несимметричными входами Система с незаземленными несимметричными входами (NRSE)

 Стандартные сигналы Аналоговые сигналы: • 0… 5 В; • 0… 10 В; • 0… 20 м. А • 4… 20 м. А, • токовая петля. Дискретные сигналы: • сигналы TTL-уровня с диапазоном 0… 5 В; • сигналы TTL-уровня с диапазоном 0… 24 в.
Стандартные сигналы Аналоговые сигналы: • 0… 5 В; • 0… 10 В; • 0… 20 м. А • 4… 20 м. А, • токовая петля. Дискретные сигналы: • сигналы TTL-уровня с диапазоном 0… 5 В; • сигналы TTL-уровня с диапазоном 0… 24 в.
 — способ передачи информации с") То ковая петля • То ковая петля (Current Loop) — способ передачи информации с помощью измеряемых значений силы электрического тока. • Принцип работы токовой петли это дифференциальная пара • Для задания измеряемых значений тока используется, как правило, управляемый источник тока. По виду передаваемой информации различаются аналоговая токовая петля и цифровая токовая петля. • Токовая петля может использоваться на значительных расстояниях (до нескольких километров). Для защиты оборудования применяется гальваническая развязка на оптоэлектронных приборах, например оптронах. • Основное преимущество токовой петли —точность не зависит от длины и сопротивления линии передачи, поскольку управляемый источник тока будет автоматически поддерживать требуемый ток в линии. Схема позволяет запитывать датчик непосредственно от линии передачи. Несколько приемников можно соединять последовательно, источник тока будет поддерживать требуемый ток во всех одновременно
То ковая петля • То ковая петля (Current Loop) — способ передачи информации с помощью измеряемых значений силы электрического тока. • Принцип работы токовой петли это дифференциальная пара • Для задания измеряемых значений тока используется, как правило, управляемый источник тока. По виду передаваемой информации различаются аналоговая токовая петля и цифровая токовая петля. • Токовая петля может использоваться на значительных расстояниях (до нескольких километров). Для защиты оборудования применяется гальваническая развязка на оптоэлектронных приборах, например оптронах. • Основное преимущество токовой петли —точность не зависит от длины и сопротивления линии передачи, поскольку управляемый источник тока будет автоматически поддерживать требуемый ток в линии. Схема позволяет запитывать датчик непосредственно от линии передачи. Несколько приемников можно соединять последовательно, источник тока будет поддерживать требуемый ток во всех одновременно
 Принцип действия "токовой петли" В качестве линии передачи обычно используется экранированная витая пара, которая совместно с дифференциальным приемником позволяет ослабить индуктивную и синфазную помеху.
Принцип действия "токовой петли" В качестве линии передачи обычно используется экранированная витая пара, которая совместно с дифференциальным приемником позволяет ослабить индуктивную и синфазную помеху.
 • Стандарт 4 -20 м. А • логическому уровню "1" соответствует ток в линии от 4 до 20 м. А протекающий в ПРЯМОМ направлении • логическому уровню "0" соответствует ток в линии от 4 до 20 м. А протекающий в ОБРАТНОМ направлении. При токе ниже 4 м. А приемник и передатчик обнаруживают ошибку "ОБРЫВ ЛИНИИ". При токе выше 20 м. А передатчик обнаруживает ошибку "КОРОТКОЕ ЗАМЫКАНИЕ ЛИНИИ".
• Стандарт 4 -20 м. А • логическому уровню "1" соответствует ток в линии от 4 до 20 м. А протекающий в ПРЯМОМ направлении • логическому уровню "0" соответствует ток в линии от 4 до 20 м. А протекающий в ОБРАТНОМ направлении. При токе ниже 4 м. А приемник и передатчик обнаруживают ошибку "ОБРЫВ ЛИНИИ". При токе выше 20 м. А передатчик обнаруживает ошибку "КОРОТКОЕ ЗАМЫКАНИЕ ЛИНИИ".
 Согласование сигналов • Усиление/ Для достижения наибольшей точности максимальный диапазон напряжения в усиленном сигнале должен равняться максимальному входному диапазону АЦП. • Изоляция Необходима по соображениям безопасности и избежания эффекта паразитного контура с замыканием через землю • Фильтрация –удаление ненужных составляющих из измеряемого сигнала. • Питание – питание для параметрических датчиков, таких как датчики деформаций, термисторы и терморезисторы. • Линеаризация – учет нелинейности отклика • Следует чётко понимать природу измеряемого сигнала, конфигурацию, в которой производятся измерения и воздействие, которое может оказывать окружающая среда. Основываясь на этой информации, можно определить, нужно ли использовать модули согласования сигнала в данной системе сбора данных или нет.
Согласование сигналов • Усиление/ Для достижения наибольшей точности максимальный диапазон напряжения в усиленном сигнале должен равняться максимальному входному диапазону АЦП. • Изоляция Необходима по соображениям безопасности и избежания эффекта паразитного контура с замыканием через землю • Фильтрация –удаление ненужных составляющих из измеряемого сигнала. • Питание – питание для параметрических датчиков, таких как датчики деформаций, термисторы и терморезисторы. • Линеаризация – учет нелинейности отклика • Следует чётко понимать природу измеряемого сигнала, конфигурацию, в которой производятся измерения и воздействие, которое может оказывать окружающая среда. Основываясь на этой информации, можно определить, нужно ли использовать модули согласования сигнала в данной системе сбора данных или нет.
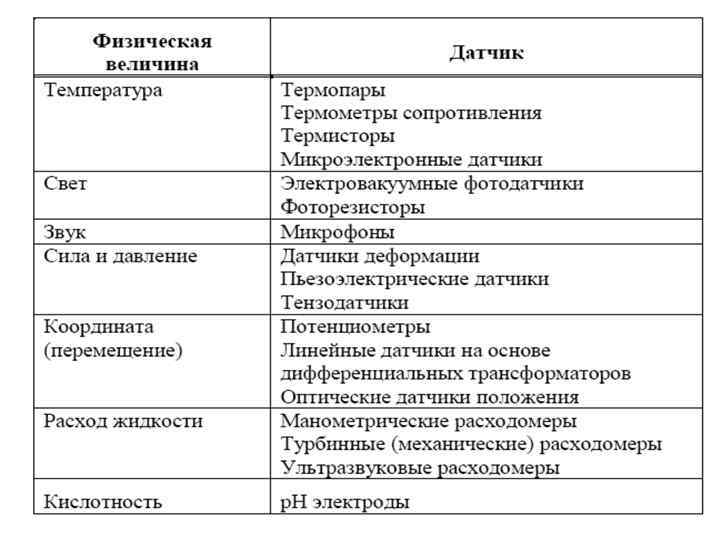
 Типы датчиков, сигналов и виды кондиционирования сигналов
Типы датчиков, сигналов и виды кондиционирования сигналов
 преобразователи датчиков температуры ИП 0304") Измерительные (нормирующие) преобразователи датчиков температуры ИП 0304
Измерительные (нормирующие) преобразователи датчиков температуры ИП 0304
 Схема преобразователя ИП 0304
Схема преобразователя ИП 0304
 Конфигуратор
Конфигуратор
. .") Универсальный нормирующий преобразователь НПТ 1 • Преобразование сигналов термодатчиков в унифицированный сигнал 0(4). . . 20 м. А • Универсальный вход • Поддержка большинства известных типов термодатчиков • Высокая точность преобразования • Высокая разрешающая способность • Настройка по интерфейсу USB 2. 0 • Климатическое исполнение «-40. . . +85 С»
Универсальный нормирующий преобразователь НПТ 1 • Преобразование сигналов термодатчиков в унифицированный сигнал 0(4). . . 20 м. А • Универсальный вход • Поддержка большинства известных типов термодатчиков • Высокая точность преобразования • Высокая разрешающая способность • Настройка по интерфейсу USB 2. 0 • Климатическое исполнение «-40. . . +85 С»
 Нормализатор сигнала тензомоста Тип входного сигнала — мост Диапазон входного сигнала: ± 15, ± 30, ± 100 м. В Выходной сигнал: 0 -10, 0 -5 В, 0 -20 м. А Гальваническая изоляция 1000 В
Нормализатор сигнала тензомоста Тип входного сигнала — мост Диапазон входного сигнала: ± 15, ± 30, ± 100 м. В Выходной сигнал: 0 -10, 0 -5 В, 0 -20 м. А Гальваническая изоляция 1000 В
 Усилитель тензосигнала тип 131 • Сопротивление моста от 120 до 2000 Ом • Четырехпроводная схема подключения тензомоста • Напряжение питания 12 -24 В • Рабочая температура -20ºC. . +50ºC • Обеспечивает напряжение возбуждения моста 8, 0 В • Линейность 1: 4000
Усилитель тензосигнала тип 131 • Сопротивление моста от 120 до 2000 Ом • Четырехпроводная схема подключения тензомоста • Напряжение питания 12 -24 В • Рабочая температура -20ºC. . +50ºC • Обеспечивает напряжение возбуждения моста 8, 0 В • Линейность 1: 4000
 Линейное преобразование переменного тока частотой 45 - 65 Гц в выходной унифицированный сигнал постоянного ток Класс точности 1, 0 Диапазон изменения входного сигнала, тока, А 0 -0, 5; 0 -1, 0; 0 -2, 5; 0 -5, 0 Рабочая область частоты, Гц 45 -65 Расширенная область частот, Гц 65 -1000 Диапазон изменения выходного сигнала, м. А 0 -5 Диапазон изменения сопротивления нагрузки, к. Ом 0 -2, 5 Потребляемая мощность, В·А 1, 0 от измерительной цепи
Линейное преобразование переменного тока частотой 45 - 65 Гц в выходной унифицированный сигнал постоянного ток Класс точности 1, 0 Диапазон изменения входного сигнала, тока, А 0 -0, 5; 0 -1, 0; 0 -2, 5; 0 -5, 0 Рабочая область частоты, Гц 45 -65 Расширенная область частот, Гц 65 -1000 Диапазон изменения выходного сигнала, м. А 0 -5 Диапазон изменения сопротивления нагрузки, к. Ом 0 -2, 5 Потребляемая мощность, В·А 1, 0 от измерительной цепи
 Линейное преобразование активной мощности трехфазных и однофазных, четырех- и трехпроводных цепей переменного тока в унифицированный выходной сигнал постоянного тока или напряжения
Линейное преобразование активной мощности трехфазных и однофазных, четырех- и трехпроводных цепей переменного тока в унифицированный выходной сигнал постоянного тока или напряжения
 Преобразователи линейного преобразования частоты переменного тока в унифицированные выходные сигналы постоянного тока Тип Е 858 А 1 Е 858 А 2 Е 858 В 1 Е 858 В 2 Е 858 С 1 Е 858 С 2 Входные параметры F, Гц* 49. . . 51, 48. . . 52, 45. . . 55, 59. . . 61, 58. . . 62, 55. . . 65 Iвых, м. А Рвых, м. А Класс точности Не более 2 0, 02 Uном, В 100 220 100 U, В 85. . . 115 187. . . 253 85. . . 115 0. . . 5 4. . . 20 0. . . 20 220 187. . . 253 0. . . 20
Преобразователи линейного преобразования частоты переменного тока в унифицированные выходные сигналы постоянного тока Тип Е 858 А 1 Е 858 А 2 Е 858 В 1 Е 858 В 2 Е 858 С 1 Е 858 С 2 Входные параметры F, Гц* 49. . . 51, 48. . . 52, 45. . . 55, 59. . . 61, 58. . . 62, 55. . . 65 Iвых, м. А Рвых, м. А Класс точности Не более 2 0, 02 Uном, В 100 220 100 U, В 85. . . 115 187. . . 253 85. . . 115 0. . . 5 4. . . 20 0. . . 20 220 187. . . 253 0. . . 20
 Модули ввода-вывода Мх110 • Стандарт проводной связи RS-485. • Простые протоколы, основанные на принципе «запрос-ответ» . работа по протоколам Mod. Bus-ASCII, Mod. Bus-RTU, DCON и ОВЕН. • Модули объединяются в сеть с помощью двухпроводной линии связи и подключаются к ведущему устройству (Master). В роли мастера может выступать: – ПЛК, – персональный компьютер с установленной SCADA-системой – панель оператора. • модулей (Slave), имеет уникальный адрес. • Одновременно в одной сети может быть один мастер и до 32 модулей. Максимальная длина линии связи составляет 1200 м. Длина линии связи и количество модулей в сети могут быть увеличены с помощью повторителей интерфейса (например, ОВЕН АС 5).
Модули ввода-вывода Мх110 • Стандарт проводной связи RS-485. • Простые протоколы, основанные на принципе «запрос-ответ» . работа по протоколам Mod. Bus-ASCII, Mod. Bus-RTU, DCON и ОВЕН. • Модули объединяются в сеть с помощью двухпроводной линии связи и подключаются к ведущему устройству (Master). В роли мастера может выступать: – ПЛК, – персональный компьютер с установленной SCADA-системой – панель оператора. • модулей (Slave), имеет уникальный адрес. • Одновременно в одной сети может быть один мастер и до 32 модулей. Максимальная длина линии связи составляет 1200 м. Длина линии связи и количество модулей в сети могут быть увеличены с помощью повторителей интерфейса (например, ОВЕН АС 5).
 Модификации модулей ввода вывода Mx 110 Модуль Основные характеристики входов/выходов Датчики - термосопротивления, термопары, 0(4). . . 20 м. А, 0. . . 1 В, 0. . . 5000 Ом, класс точности 0, 25 «быстрые» входы: датчики - 0(4). . . 20 м. А, 0. . . 5 м. А 0. . . 10 В, частота MВ 110 -24, 220. 8 АС измерений 200 Гц, класс точности 0, 25 датчики типа «сухой контакт» , транзисторные ключи n-p-n типа, MB 110 -224. 16 Д частота до 1 к. Гц, не требует питания датчиков Дискретный вход Аналоговый выход - - 2 - 8 16 - - - датчики типа «сухой контакт» , транзисторные ключи n-p-n и p-n-p 16 типа, частота до 1 к. Гц, питание внешнее датчиков 24 В - - 1 8 1 4 8 4 - - входы: датчики типа «сухой контакт» , транзисторные ключи n-p-n MК 110 -220. 4 ДН. 4 Р и p-n-p типа, частота до 1 к. Гц, питание датчиков 24 В 4 выходы: э/м реле 4 А 250 В 4 - - входы: датчики типа «сухой контакт» , транзисторные ключи n-p-n MК 110 -224. 8 ДН. 4 Р и p-n-p типа, частота до 1 к. Гц, питание датчиков 24 В 8 выходы: э/м реле 4 А 250 В 4 - - MВ 110 -224. 2 A MВ 110 -224. 16 ДН MВ 110 -224. 1 ВИ(2) МВ 110 -224. 1 ТД МВ 110 -224. 4 ТД MВ 110 -224. 8 ДФ MК 110 -224. 8 Д. 4 Р датчики (дифтрансформаторы) с выходным сигналом -10. . . +10 м. Гн, класс точности 0, 25 Сигналы от тензодатчиков дискретные входы для сигналов 220 В входы: датчики типа «сухой контакт» , транзисторные ключи n-p-n типа выходы: э/м реле 4 А 250 В
Модификации модулей ввода вывода Mx 110 Модуль Основные характеристики входов/выходов Датчики - термосопротивления, термопары, 0(4). . . 20 м. А, 0. . . 1 В, 0. . . 5000 Ом, класс точности 0, 25 «быстрые» входы: датчики - 0(4). . . 20 м. А, 0. . . 5 м. А 0. . . 10 В, частота MВ 110 -24, 220. 8 АС измерений 200 Гц, класс точности 0, 25 датчики типа «сухой контакт» , транзисторные ключи n-p-n типа, MB 110 -224. 16 Д частота до 1 к. Гц, не требует питания датчиков Дискретный вход Аналоговый выход - - 2 - 8 16 - - - датчики типа «сухой контакт» , транзисторные ключи n-p-n и p-n-p 16 типа, частота до 1 к. Гц, питание внешнее датчиков 24 В - - 1 8 1 4 8 4 - - входы: датчики типа «сухой контакт» , транзисторные ключи n-p-n MК 110 -220. 4 ДН. 4 Р и p-n-p типа, частота до 1 к. Гц, питание датчиков 24 В 4 выходы: э/м реле 4 А 250 В 4 - - входы: датчики типа «сухой контакт» , транзисторные ключи n-p-n MК 110 -224. 8 ДН. 4 Р и p-n-p типа, частота до 1 к. Гц, питание датчиков 24 В 8 выходы: э/м реле 4 А 250 В 4 - - MВ 110 -224. 2 A MВ 110 -224. 16 ДН MВ 110 -224. 1 ВИ(2) МВ 110 -224. 1 ТД МВ 110 -224. 4 ТД MВ 110 -224. 8 ДФ MК 110 -224. 8 Д. 4 Р датчики (дифтрансформаторы) с выходным сигналом -10. . . +10 м. Гн, класс точности 0, 25 Сигналы от тензодатчиков дискретные входы для сигналов 220 В входы: датчики типа «сухой контакт» , транзисторные ключи n-p-n типа выходы: э/м реле 4 А 250 В
 Модуль Основные характеристики входов/выходов Дискретный входы: кондуктометрические датчики уровня 4 выходы: э/м реле 4 А 250 В входы: датчики типа «сухой контакт» , транзисторные ключи n. МК 110 p-n и p-n-p типа, частота до 1 к. Гц, питание датчиков 24 В 4 220. 4 ДН. 4 ТР выходы: твердотельные реле 250 В MУ 110 -224. 8 И ЦАП 4. . . 20 м. А, осн. Приведенная погрешность 0. 5 % MУ 110 -224. 6 У ЦАП 4. . . 20 м. А, осн. Приведенная погрешность 0. 5 % P: э/м реле 4 А 250 В MУ 110 -224. 8 Р(К) К: транзисторная оптопара n-p-n типа 400 м. А 60 В P: э/м реле 4 А 250 В MУ 110 -224. 16 Р(К) К: транзисторная оптопара n-p-n типа 400 м. А 60 В Датчики - термосопротивления, термопары, 0(4). . . 20 м. А, 0. . . 1 В, MВ 110 -224. 8 А 0. . . 5000 Ом, класс точности 0, 25 входы: датчики типа «сухой контакт» , транзисторные ключи n. МВ 110 -32 ДН 32 p-n и p-n-p типа, частота до 1 к. Гц, питание датчиков 24 В МУ 110 -32 Р P: э/м реле 3 А 250 В «быстрые» входы: датчики - 0(4). . . 20 м. А, 0. . . 5 м. А 0. . . 10 В, MВ 110 -224. 2 АС частота измерений 200 Гц, класс точности 0, 25 MК 110 -220. 4 К. 4 Р Аналоговый выход 4 - - 4 - - 8 6 8 - - 16 - - 8 - - - 32 - - - 2 -
Модуль Основные характеристики входов/выходов Дискретный входы: кондуктометрические датчики уровня 4 выходы: э/м реле 4 А 250 В входы: датчики типа «сухой контакт» , транзисторные ключи n. МК 110 p-n и p-n-p типа, частота до 1 к. Гц, питание датчиков 24 В 4 220. 4 ДН. 4 ТР выходы: твердотельные реле 250 В MУ 110 -224. 8 И ЦАП 4. . . 20 м. А, осн. Приведенная погрешность 0. 5 % MУ 110 -224. 6 У ЦАП 4. . . 20 м. А, осн. Приведенная погрешность 0. 5 % P: э/м реле 4 А 250 В MУ 110 -224. 8 Р(К) К: транзисторная оптопара n-p-n типа 400 м. А 60 В P: э/м реле 4 А 250 В MУ 110 -224. 16 Р(К) К: транзисторная оптопара n-p-n типа 400 м. А 60 В Датчики - термосопротивления, термопары, 0(4). . . 20 м. А, 0. . . 1 В, MВ 110 -224. 8 А 0. . . 5000 Ом, класс точности 0, 25 входы: датчики типа «сухой контакт» , транзисторные ключи n. МВ 110 -32 ДН 32 p-n и p-n-p типа, частота до 1 к. Гц, питание датчиков 24 В МУ 110 -32 Р P: э/м реле 3 А 250 В «быстрые» входы: датчики - 0(4). . . 20 м. А, 0. . . 5 м. А 0. . . 10 В, MВ 110 -224. 2 АС частота измерений 200 Гц, класс точности 0, 25 MК 110 -220. 4 К. 4 Р Аналоговый выход 4 - - 4 - - 8 6 8 - - 16 - - 8 - - - 32 - - - 2 -
 Подключение прибора
Подключение прибора

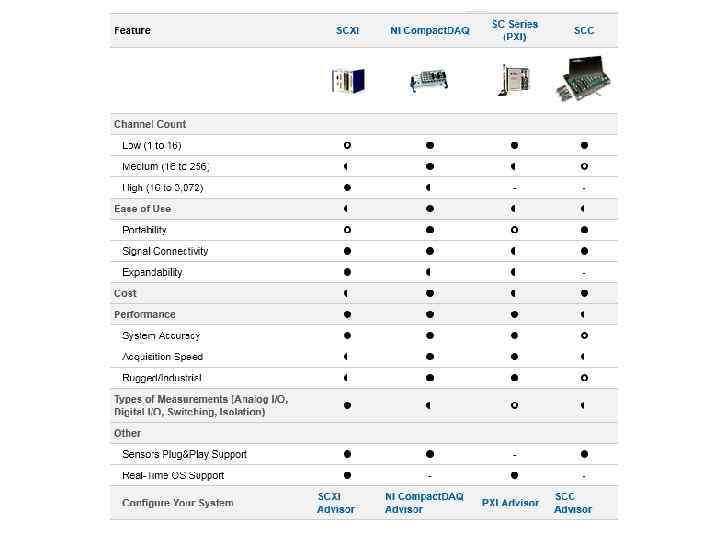
 • Модульная система согласования сигналов SCXI - высокопроизводительная многоканальная платформа согласования и коммутации из одного или нескольких промышленных шасси с установленными различными модулями согласования сигналов. • Портативная недорогая система согласования сигналов SCC– недорогое решение для задач согласования сигналов с небольшим количеством каналов с возможностя поканальной конфигурации каналов ввода/вывода с использованием одно- и двухканальных модулей • SC серия – устройства сбора данных со встроенными возможностями согласования сигналов - расширяют возможности платформы PXI путем интегрирования схем согласования сигналов в 16 -разрядные модули PXI. • Высокоточные регистраторы температуры и
• Модульная система согласования сигналов SCXI - высокопроизводительная многоканальная платформа согласования и коммутации из одного или нескольких промышленных шасси с установленными различными модулями согласования сигналов. • Портативная недорогая система согласования сигналов SCC– недорогое решение для задач согласования сигналов с небольшим количеством каналов с возможностя поканальной конфигурации каналов ввода/вывода с использованием одно- и двухканальных модулей • SC серия – устройства сбора данных со встроенными возможностями согласования сигналов - расширяют возможности платформы PXI путем интегрирования схем согласования сигналов в 16 -разрядные модули PXI. • Высокоточные регистраторы температуры и
 Шасси Compact. DAQ на базе интерфейсов USB и Ethernet Описание Ethernet шасси USB шасси Модель Число слотов Внешний триггер BNC NI 9188 8 Да NI 9174 4 Нет Скорость передачи Описание данных 8 -ми слотовое шасси на базе 1 Гб/сек интерфейса Ethernet 8 -ми слотовое шасси на базе 480 Mб/сек интерфейса USB 480 Mб/сек 4 -x слотовое шасси на базе интерфейса USB
Шасси Compact. DAQ на базе интерфейсов USB и Ethernet Описание Ethernet шасси USB шасси Модель Число слотов Внешний триггер BNC NI 9188 8 Да NI 9174 4 Нет Скорость передачи Описание данных 8 -ми слотовое шасси на базе 1 Гб/сек интерфейса Ethernet 8 -ми слотовое шасси на базе 480 Mб/сек интерфейса USB 480 Mб/сек 4 -x слотовое шасси на базе интерфейса USB
 Модули ввода вывода C-серии Аналоговый ввод, аналоговый вывод, цифровой ввод-вывод, реле
Модули ввода вывода C-серии Аналоговый ввод, аналоговый вывод, цифровой ввод-вывод, реле
 Число Разрешение Диапазон каналов АЦП/ЦАП Описание Модель Аналоговый ввод NI 9201 8 ± 10 В 12 -бит NI 9203 NI 9205 8 32 ± 20 м. A ± 10 В 16 -бит NI 9206 16 ± 10 В 16 -бит NI 9207 8/8 NI 9208 NI 9211 16 4 ± 10 В, ± 21, 5 м. А ± 80 м. В NI 9215 4 ± 10 В 16 -бит NI 9217 4 100 Ом 16 -бит NI 9219 4 зав. от типа измерений 24 -бит Описание Недорогой модуль Ток Мультиплекс. 500 В (изоляция) Частота 500 к. Гц 250 к. Гц 24 -бит Термопарный 500 Гц 24 -бит Токовый вход 500 Гц Термопарный 14 Гц Одновременна 100 к. Гц/кан. я оцифровка Резист. датчик 400 Гц температуры 11 режимов 100 Гц/кан. измерений
Число Разрешение Диапазон каналов АЦП/ЦАП Описание Модель Аналоговый ввод NI 9201 8 ± 10 В 12 -бит NI 9203 NI 9205 8 32 ± 20 м. A ± 10 В 16 -бит NI 9206 16 ± 10 В 16 -бит NI 9207 8/8 NI 9208 NI 9211 16 4 ± 10 В, ± 21, 5 м. А ± 80 м. В NI 9215 4 ± 10 В 16 -бит NI 9217 4 100 Ом 16 -бит NI 9219 4 зав. от типа измерений 24 -бит Описание Недорогой модуль Ток Мультиплекс. 500 В (изоляция) Частота 500 к. Гц 250 к. Гц 24 -бит Термопарный 500 Гц 24 -бит Токовый вход 500 Гц Термопарный 14 Гц Одновременна 100 к. Гц/кан. я оцифровка Резист. датчик 400 Гц температуры 11 режимов 100 Гц/кан. измерений
 • Reconfigurable input/output – RIO) предоставляет вам возможность создания на") Технология реконфигурируемого ввода/вывода (RIO) • Reconfigurable input/output – RIO) предоставляет вам возможность создания на аппаратном уровне вашей собственной контрольноизмерительной системы, используя программируемые логические интегральные схемы (ПЛИС) и инструментарий среды графической разработки приложений Lab. VIEW
Технология реконфигурируемого ввода/вывода (RIO) • Reconfigurable input/output – RIO) предоставляет вам возможность создания на аппаратном уровне вашей собственной контрольноизмерительной системы, используя программируемые логические интегральные схемы (ПЛИС) и инструментарий среды графической разработки приложений Lab. VIEW
 Compact. RIO Контроллер реального времени Реконфигурируемое шасси Модули ввода/вывода
Compact. RIO Контроллер реального времени Реконфигурируемое шасси Модули ввода/вывода
 Контроллер реального времени Особенности c. RIO- c. RIO 9002 9004 9012 9014 32 64 64 128 DRAM (MB) Объем внутренней 64 энергонезависимой памяти (MB) 10/100 Base. T/TX да Ethernet port RS 232 Serial да Port USB port нет Число светодиодных индикаторов 4 Lab. VIEW Real-Time Количество DIP-переключателей Напряжение питания Максимальное энергопотребление Дублирющий вход для источника питания встроенный Web-сервер встроенный FTP-сервер 512 128 2000 да да да нет да да 4 4 4 5 5 9 -35 В 7 Вт да да да
Контроллер реального времени Особенности c. RIO- c. RIO 9002 9004 9012 9014 32 64 64 128 DRAM (MB) Объем внутренней 64 энергонезависимой памяти (MB) 10/100 Base. T/TX да Ethernet port RS 232 Serial да Port USB port нет Число светодиодных индикаторов 4 Lab. VIEW Real-Time Количество DIP-переключателей Напряжение питания Максимальное энергопотребление Дублирющий вход для источника питания встроенный Web-сервер встроенный FTP-сервер 512 128 2000 да да да нет да да 4 4 4 5 5 9 -35 В 7 Вт да да да

 разработан компанией Hewlett") Канал общего пользования • КОП (General Purpose Interface Bus - GPIB) разработан компанией Hewlett Packard в конце 1960 года для обеспечения связи между компьютерами и измерительными приборами, известен как стандатр IEEE 488. (2. ). • КОП является цифровой 24 -х разрядной параллельной шиной. Шина состоит из: – 8 линий данных (data lines), – 5 линий управления шиной (bus management lines) - ATN, EOI, LFC, REN, SRQ, – 3 линий квитирования (handshaking), – 8 заземленных линий. • сообщения (messages) представляются в виде символов ASCII
Канал общего пользования • КОП (General Purpose Interface Bus - GPIB) разработан компанией Hewlett Packard в конце 1960 года для обеспечения связи между компьютерами и измерительными приборами, известен как стандатр IEEE 488. (2. ). • КОП является цифровой 24 -х разрядной параллельной шиной. Шина состоит из: – 8 линий данных (data lines), – 5 линий управления шиной (bus management lines) - ATN, EOI, LFC, REN, SRQ, – 3 линий квитирования (handshaking), – 8 заземленных линий. • сообщения (messages) представляются в виде символов ASCII
 Устройства и типичная система с КОП Каждое устройство, включая плату-контроллер, должно иметь свой уникальный адрес КОП в диапазоне от 0 до 30
Устройства и типичная система с КОП Каждое устройство, включая плату-контроллер, должно иметь свой уникальный адрес КОП в диапазоне от 0 до 30
 PXI и VXI PXI, сокращение от «compact. PCl extension for Instrumentation» ( «расширение шины Compact-PCI для использования в инструментальных системах» ) VXI, сокращение от «VMEbus extension for Instrumentation» ( «расширение шины VME для использования в инструментальных системах» )
PXI и VXI PXI, сокращение от «compact. PCl extension for Instrumentation» ( «расширение шины Compact-PCI для использования в инструментальных системах» ) VXI, сокращение от «VMEbus extension for Instrumentation» ( «расширение шины VME для использования в инструментальных системах» )
 Вопросы • 1. Какие основные функции могут осуществлять ИИС? • 2. Из каких основных компонент состоит ИИС? • 3. По каким основным класификационным признакам подразделяются ИИС? • 4. В чем различие между системами автоматизированного контроля и телеизмерительными системами?
Вопросы • 1. Какие основные функции могут осуществлять ИИС? • 2. Из каких основных компонент состоит ИИС? • 3. По каким основным класификационным признакам подразделяются ИИС? • 4. В чем различие между системами автоматизированного контроля и телеизмерительными системами?