Автоматика управления.ppt
- Количество слайдов: 198



Автоматика энергосистем Объем работы студента в часах Всего: 180. С преподавателем: 54, в том числе лекций 68, п. з. 18, л. р. 18. Самостоятельная работа 108. Литература 1. Автоматика электроэнергетических систем / О. П. Алексеев, В. Е. Казанский, В. Л. Козис и др. ; Под ред. В. Л. Козиса и Н. И. Овчаренко. – М. : Энергоиздат, 1981. – 479 с. 2. Автоматизация электроэнергетических систем / О. П. Алексеев, В. Л. Козис, В. В. Кривенков и др. ; Под ред. В. П. Морозкина и Д. Энгелаге. – М. : Энергоатомиздат, 1994. – 448 с. 3. Овчаренко Н. И. Автоматика электрических станций и электроэнергетических систем: Учебник для вузов / Под ред. А. Ф. Дьякова. – М. : Изд-во НЦ ЭНАС, 2000. – 504 с.

4. Беркович М. А. Основы автоматики энергосистем / М. А. Беркович, А. Н. Комаров, В. А. Семенов. Беркович М. А. , М. : Энергоиздат, 1981. – 432 с. 5. Беркович М. А. , Гладышев В. А. , Семенов В. А. Автоматика энергосистем, - М. : Энергоатомиздат, 1991. – 238 с. Дополнительная 6. Дроздов А. Д. , Засыпкин А. С, Аллилуев А. А и др. Автоматизация энергетических систем, - М. : Энергия, 1977. -441 с. 7. Барзам А. Б. Системная автоматика, -М. : Энергоатомиздат, 1994 (1989). 8. Рабинович Р. С. Автоматическая частотная разгрузка энергосистем, М. : Энергия, 1980. 9. Окин А. А. Противоаварийная автоматика, М. : Издательство МЭИ, 1995. 10 Ю. Е. Гуревич, Л. Е. Либова, А. А. Окин. Расчеты устойчивости и противоаварийной автоматики в энергосистемах.

11. Тимофеев И. П. Автоматическое включение линий электропередачи. Метод. указания к лабораторной работе для студентов IV и V курсов всех форм обучения. – Новосибирск : Изд-во НГТУ, 2008. – 32 с. № 3590. 12. Тимофеев И. П. Синхронизация генераторов. Методические указания к выполнению лабораторной работы по кусу «Автоматика энергосистем» . Новосибирск, НГТУ, 2011. – 34 с. № 4089. 13. Давыдов В. А. , Тимофеев И. П. Автоматический синхронизатор СА-1. Метод. указания к лабораторной работе / Новосиб. электротехн. ин-т. – Новосибирск, 1990. 14. Тимофеев И. П. Автоматическая частотная разгрузка. Методические указания к выполнению лабораторной работы по кусу «Автоматика энергосистем» . Новосибирск, НГТУ, 2015. – 28 с. № 4511. 15. Тимофеев И. П. Автоматика электроэнергетических систем. Методические указания и задания для выполнения расчетнографических работ по курсу «Автоматика электроэнергетических систем» для студентов V курса специальности 210400 – Релейная защита и автоматика электроэнергетических систем. Новосибирск, НГТУ, 2003. № 2500.

Балльно-рейтинговая система оценки знаний студентов по дисциплине "Автоматика энергосистем" Курс V, семестр 9, специальность "Релейная защита и автоматизация электроэнергетических систем" В учебно-методический комплект дисциплины входят: рабочая программа учебной дисциплины, методические указания к выполнению расчетно-графических работ, лабораторных работ, слайд-конспект лекций, перечень контрольных работ, контрольные вопросы по курсу. По учебному плану предусмотрено лекций 36 часов, практических занятий 18 часов, 4 лабораторный работы (18 часов), итоговая аттестация - экзамен. Допуском к экзамену является выполнение и успешная защита расчетно-графической работы, выполнение и защита 4 -х лабораторных работ. Экзамен проводится в устной форме. В экзаменационном билете предусмотрены три вопроса, охватывающие наиболее важные разделы дисциплины.

Итоговая оценка по дисциплине складывается по результатам работы в семестре (написание 2 -х контрольных работ, выполнение и защита расчетно-графической работы, выполнение и защита 4 -х лабораторных работ, посещение лекций и практических занятий) и сдачи экзамена. Контрольные работы проводятся в конце лекционных занятий после завершения соответствующего раздела дисциплины. Максимальное количество баллов по лабораторной работе предполагает её успешную защиту до выполнения следующей работы. Максимальное количество баллов за расчетно-графическую работу может быть получено при её успешной защите не позднее окончания зачетной недели. Текущий контроль (максимальное количество баллов – 60, минимальное - 30). 1. 1. Контрольные работы: - К. Р. № 1 – Устройства автоматического управления, max/min – 8/4 баллов). - К. Р. № 2 – Устройства автоматического регулирования, max/min – 8/4. 1. 2. Выполнение и защита 4 -х лабораторных работ (24/12 баллов). 1. 3. Посещаемость лекций и практических занятий (10/5 баллов). 1. 4. Выполнение и защита расчетно-графической работы (10/5 баллов).

2. Экзамен – максимальное количество баллов – 40, минимальное - 20. 3. Итоговая аттестация. Окончательная оценка по традиционной (4 -х уровневой) системе и по системе зачетных единиц будет определяться набранным общим количеством баллов по принципу, приведенному в таблице: Таким образом, допуском к экзамену по результатам работы в семестре (семестровый рейтинг) составит 30 баллов. При минимальном количестве баллов, набранном по результатам экзамена (аттестационный рейтинг), равном 20 -и баллам, суммарный минимальный рейтинг студента составит: Nin балл за семестр + min балл за экзамен = 30 + 20 = 50 = Е, что соответствует удовлетворительной оценке по системе ECTS.

Диапазон баллов Традиционная оценка рейтинга Оценка по системе зачетных единиц ECTS (European Credit Transfer System) 98 - 100 Отлично A+ 93 - 97 Отлично A 90 - 92 Отлично A- 87 - 89 Отлично B+ 83 - 86 Хорошо B 80 – 82 Хорошо B- 77 – 79 Хорошо C+ 73 – 76 Хорошо C

70 – 72 Удовлетворительно C- 67 – 69 Удовлетворительно D+ 63 – 66 Удовлетворительно D 60 - 62 Удовлетворительно D- 50 - 59 Удовлетворительно E 25 - 49 Неудовлетворительно (с возможностью пересдачи) FX 0 - 24 Неудовлетворительно (без возможности пересдачи) F

Автоматизация – это автоматическое управление схемой и режимами (т. е. процессом производства, передачи и распределения электроэнергии) энергосистем в нормальных и аварийных условиях. Автоматизация позволяет обеспечить устойчивость системы в аварийных и послеаварийных режимах, повысить надежность, экономичность и качество эл. энергии.
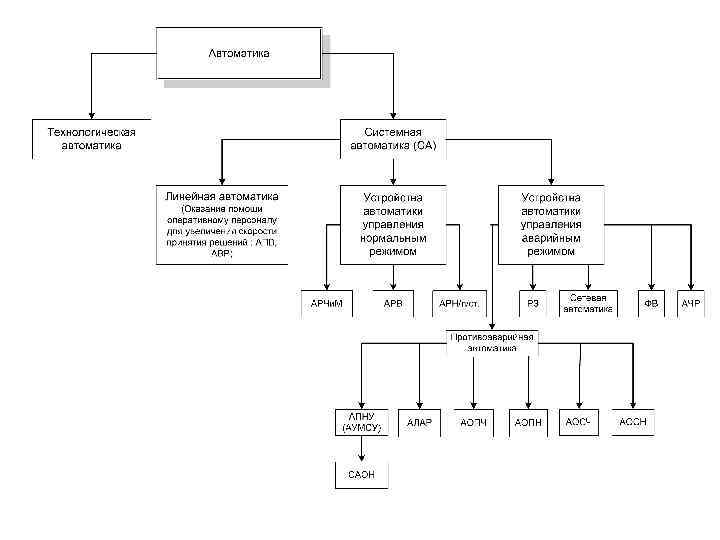

Технологическая автоматика - это комплекс технических средств автоматического управления вспомогательным оборудованием электростанций (ГГ и ТГ). Автоматическое управление – это: - изменение состояния ГГ и ТГ, обеспечение оптимальных режимов; - нормальный или аварийный пуск (останов) турбины; - включение на параллельную работу; - перевод из генераторного режима в режим СК. Управление нормальным режимом выполняется постоянно устройствами непрерывного действия – регуляторами. Например, АСУ ТП ГГ выполняет следующие виды операций: - контроль готовности турбины и генератора к пуску (готовность технического водоснабжения, подшипника гидротурбины и т. д. ); - охлаждение масла генератора и подпятника гидроагрегата; - снабжение дистиллированной водой обмоток статора; - наличие достаточного давления в маслонапорной установке; - пуск (ускоренный пуск) и включение на параллельную работу, перевод в режим СК, нормальный и аварийный останов ГГ.

Более сложным является изменение состояния турбоагрегата ТЭС. Управляющие воздействия должны быть скоординированными между топливными и парогенераторными технологическими процессами. Время пуска составляет несколько часов. В основном это время определяется необходимостью постепенного и непрерывного прогрева паропроводящих и рабочих частей турбины, температурным линейным расширением конструктивных частей (особенно – ротора). Неравномерный нагрев конструктивных частей ТГ может вызвать опасные внутренние напряжения в стальных конструкциях, нарушить уплотнения, удлинение вала – до 10 мм. АСУ ТП ТЭС сложнее! Нужно взаимодействовать со всеми цехами станции: топливным, парогенераторным (котельным), турбинным и электроцехом. АСУ ТП управляет поступлением пара в турбину (через дроссельные клапаны), задает возрастающие параметры пара в соответствии с тепловым состоянием турбины, производительность (т. пара/час). Свежий пар со сверхкритическими параметрами (до 260 атм. и t = 560 град. ) подается в ЦВД, перед ЦСД производится пром. перегрев пара). Управление питательным, конденсаторным насосами, дробилки, мельницы, дымососы.

Общие сведения об автоматике 1. Устройства автоматического управления Под автоматическим управлением понимают выполнение определённых действий по заданной программе при возникновении внешних возмущающих воздействий (изменение схемы или параметров режима, команды персонала). Структурная схема любого устройства управления:

Устройства автоматического регулирования Под автоматическим регулированием понимают непрерывный процесс поддержания какого-либо параметра на неизменном (или в заданном пределе) уровне или его изменение по заданному закону (U, f, P, Q). Различают 3 принципа регулирования: 1) Принцип регулирования по возмущению; 2) Принцип регулирования по отклонению; 3) Комбинированный.

Устройства автоматического регулирования Структурная схема автоматического регулирования по принципу возмущения ничем не отличается от структурной схемы автоматического управления (только отсутствует обратная связь):

Устройства автоматического регулирования Структурная схема устройств, действующих по принципу отклонения: Пример: Корректор напряжения.

Характеристики регулирования Обратная связь улучшает качество переходного процесса, задаёт коэффициент усиления. Есть главная ОС, дополнительные внутренние ОС корректируют управляющие воздействия. Положительная обратная связь увеличивает коэффициент усиления и повышает быстродействие, но при этом повышается вероятность нарушения устойчивости работы.

Характеристики регулирования Регуляторы должны обеспечивать качество регулирования. Показателем качества может быть: - точность регулирования в установившемся режиме; - быстродействие системы регулирования; - характер переходного процесса; - степень перерегулирования.

Характеристики регулирования 1. Статические характеристики регулирования – это зависимость регулируемой величины от одного из возмущающих воздействий.

Как правило, первичные регуляторы имеют статическую характеристику. При увеличении возмущающего фактора регулируемый параметр снижается. Степень снижения характеризуется коэффициентом статизма кст (кs ): При кст показывает относительное изменение регулируемой величины. Характеристика с отрицательным кст используется при встречном регулировании.

Характеристики регулирования Динамические характеристики – это зависимость регулируемой величины во времени.

Синхронизация генераторов Автоматическое включение синхронных машин на параллельную работу Различают точную синхронизацию и самосинхронизацию. При точной синхронизации необходимо соблюсти ряд условий (условия точной синхронизации): -необходимо выровнять напряжения генератора и системы; -необходимо выровнять частоты генератора и системы; -необходимо подать команду на включение выключателя генератора таким образом, чтобы в момент замыкания контактов выключателя δ=0. Если δ≠ 0, Uг≠Uс, то между генератором и системой потечёт уравнительный ток. Если частоты сильно различаются, то даже при Uг=Uс и δ=0 генератор может выпасть из синхронизма.
 ручную синхронизацию; 2) полуавтоматическую синхронизацию; 3) автоматическую")
Синхронизация генераторов При точной синхронизации различают: 1) ручную синхронизацию; 2) полуавтоматическую синхронизацию; 3) автоматическую синхронизацию. При самосинхронизации генератор раскручивается до подсинхронной скорости и включается на параллельную работу невозбуждённым. Сразу после включения выключателя на обмотки возбуждения подаётся ток возбуждения. Если Iур<3, 5 Iн, то такой процесс считается удовлетворительным.

Условия точной синхронизации

Пусть Е=Ег=Ес, а угол δ 0:

Синхронизация генераторов Если Ес≠Ег, то IУР. MAX – при δ=1800

Если Е=Е 1=Е 2, то

На осциллографе ΔЕ будет выглядеть следующим образом: , где В построении синхронизаторов используют огибающую напряжения биения, которую называют

получается путём фильтрации высокочастотных составляющих и выпрямлением. является информативным параметром, т. к. по ней можно судить о моменте оптимума. Подать сигнал на включение выключателя нужно с опережением, т. к. выключатель имеет собственное время включения выключателя. - угол опережения.

Последствия при несоблюдении условий синхронизации 1. Пусть Е 1≠Е 2, а остальные условия выполняются, т. е. f 1=f 2, δ=0.

Последствия при несоблюдении условий синхронизации При неравенстве Е 1 и Е 2 возникает IУР, который носит чисто реактивный характер. Механическое воздействие этот ток на ротор и вал турбины не оказывает, но это может привести к снижению напряжения в точке параллельной работы генераторов. Неравенство напряжений приводит к повышению погрешности синхронизатора (погрешность в задании времени опережения). 2. Пусть δ≠ 0, Е 1=Е 2, f 1=f 2. В данном случае IУР будет содержать активную составляющую.

Последствия при несоблюдении условий синхронизации

Последствия при несоблюдении условий синхронизации С максимальным РУР возможно повреждение оборудования блока. механическое

Последствия при несоблюдении условий синхронизации но: 3. Пусть f 1 ≠f 2, δ=0, Е 1=Е 2. В момент замыкания контактов выключателя IУР=0, Если f. Г>f. С, то после замыкания контактов выключателя появится IУР, т. к. вектор ЕГ опережает ЕС, появляется δ. Запасённая активная энергия ротора генератора и турбины будет отдаваться в энергосистему. Ротор генератора будет тормозиться. Если f. Г<f. С, то всё будет происходить наоборот, что приведёт к ускорению ротора генератора.

Успешность синхронизации в этом случае будет зависеть от величины ωS. Если эта величина будет не велика, то генератор не выйдет за пределы устойчивости и после колебательного процесса будет нормально работать. Если ωS велика, то генератор выйдет за предел динамической устойчивости, что влечёт за собой длительный асинхронный режим. Δf. ПР, δПР – предельные значения, которые зависят от: - мощности энергосистемы; - длины ЛЭП, связывающей систему; - типа регуляторов напряжения, установленных на генераторе; и др. В целом допустимыми являются: Δf=0. 5 Гц, δПР=45500.

Чем мощнее система, тем меньше допустимые значения Δf и δПР.

Динамические воздействия при включении синхронных генераторов при учёте свободной составляющей в IУР Принужденная составляющая уравнительной мощности(момента) при включении с углом δ≠ 0 : При включении в уравнительном токе появится апериодическая составляющая, которая в первый момент равна по величине и противоположна по знаку амплитуде принуждённой составляющей в уравнительном токе. Будем считать, что эта апериодическая составляющая не затухает в течение полпериода.

Постоянная составляющая тока включения создаёт неподвижное в пространстве поле статора, которое будет взаимодействовать с полем ротора генератора, вследствие чего возникнет свободная составляющая момента (Р*СВ=М*СВ), изменяющаяся во времени по косинусоидальному закону с частотой f. ГЕН.
: ,")
Используя тригонометрические преобразования, получим: будет при максимальном будет тогда, когда Подставим в (1): , а или

Или: Чтобы найти угол δ, при котором момент будет максимальным, берём производную от по δ и приравниваем её нулю: δ=1200 – для турбогенераторов; δ=1350 – для гидрогенераторов.

Критерии допустимости включения с угловой ошибкой Допустимость включения с тем или иным углом оценивается коэффициентом запаса по току и по электромагнитному моменту: Используя полученное выше выражения для M max, установим связь между допустимым значением уравнительного тока Iур. доп. и параметрами генератора. Ток трехфазного КЗ на выводах генератора и возникающий при этом электромагнитный момент:

Максимально допустимое значение момента: Максимальный момент при включении с углом δвкл:

При незначительных углах включения заменим sinδ его аргументом, тогда: δМАХ. ДОП – максимальный угол, при котором можно включать генератор на параллельную работу. Найдём из (2) δМАХ. ДОП, заменив синус угла аргументом:

, тогда: Приравняем
 для аварийных ситуаций КМ≥ 1. 25; 2)")
Значение КМ в настоящее время нормируется: 1) для аварийных ситуаций КМ≥ 1. 25; 2) для нормального режима работы КМ≥ 2. КМ=2 означает, что при включении генератора на параллельную работу возникающий электромагнитный момент должен быть как минимум в 2 раза меньше, чем момент при трёхфазном к. з. Раньше считалось допустимым, если IУР. ДОП=1. Если построить зависимость КМ=f(Xd!!), то увидим, что выполнение условия IУР. ДОП=1 при сопротивлении генератора более 0, 25 приведет к невыполнению условия по коэффициенту запаса по электромагнитному моменту.

С появлением генераторов большой мощности их сопротивление возросло, и из графика видно, что требованию удовлетворяют те генераторы, у которых

Автоматическое включение по способу самосинхронизации При этом способе генератор невозбуждённым раскручивается до подсинхронной скорости и включается на параллельную работу, затем, после включения выключателя, подаётся возбуждение на обмотку возбуждения, появляется синхронный момент и генератор втягивается в синхронизм. После включения генератора с ωS, в обмотке возбуждения наводится ЭДС, пропорциональная ωS. Обмотка возбуждения должна быть замкнута на гасительное сопротивление (чтобы не было пробоя изоляции) либо на якорь возбудителя.
: 1.")
Сразу после включения выключателя на ротор будут воздействовать следующие моменты (до подачи возбуждения): 1. Избыточный механический момент турбины Мм 2. Средний асинхронный момент Мас 3. Момент явнополюсности Мяп, обусловленный магнитной несимметрией ротора генератора по продольной и поперечной осям. Асинхронный момент всегда действует в сторону снижения угловой частоты. Для ТГ Мас больше, чем для ГГ, но в области малых скольжений и для ТГ и для ГГ
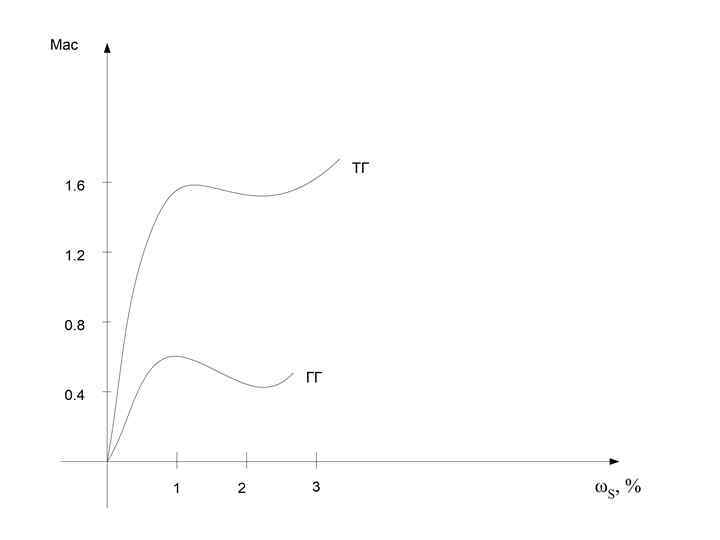

В области больших скольжений относительно небольшой Мм легко подавляет Мас и генератор быстро подтягивается к подсинхронной скорости. При равенстве –Мм=Мас наступает установившийся режим. Частота вращения генератора не будет меняться, но ротор будет вращаться с частотой меньше синхронной, т. е. со скольжением Sy. Мяп изменяется с двойной частотой скольжения и он электрически независим. При малых скольжениях Мяп может превысить Мас.

В точках 1 и 1` возможно наступление синхронного режима, т. е. в этих точках возможна синхронизация. Если синхронизм наступил в точке 1 – это хорошо, если в точке 1` - это плохо (проворот ротора на 1800), чтобы этого не допустить одновременно с включением выключателя включается АГП.
.")
Благоприятными частотами скольжения являются f. S=11. 5 Гц (частота, при которой происходит включение выключателя). Чем больше f. S, тем больше вероятность наступления асинхронного режима после подачи тока возбуждения. Чем выше скорость нарастания тока в обмотке возбуждения, тем выше вероятность возникновения асинхронного режима, поэтому при самосинхронизации АРВ СД и форсировку возбуждения (ФВ) выводят из действия на 1 -2 с.

О допустимости применения метода СС При включении генератора методом самосинхронизации, генератор испытывает толчок тока включения, эквивалентного току к. з. за сопротивлением генератора. Эти сопротивления лежат в пределах: Поэтому и момент при включении будет меньше, чем при к. з.

О допустимости применения метода СС Таким методом генератор можно включать, если: Во время включения возможна просадка напряжения, и это снижение тем больше, чем меньше мощность системы. Для генераторов мощностью 3 МВт этот метод является основным. Этот метод рекомендуется использовать для ТГ и ГГ с косвенным охлаждением, если выполняется условие Включение этим методом генераторов большой мощности с непосредственным охлаждением допускается только в аварийных режимах.

Достоинства метода СС 1. Простота операций при выполнении самосинхронизации, поэтому этот процесс легко автоматизируется; 2. Высокая скорость выполнения этой операции; 3. Возможность включения на параллельную работу при глубоких снижениях частоты и напряжения; 4. Невозможность появления IВКЛ, превышающего допустимое значение для генератора.

Принципы построения устройств точной синхронизации Требования, предъявляемые к устройствам синхронизации: - Надёжность; - Точность задания угла (времени) опережения, в том числе и при неравенстве напряжений; - Отсутствие отказа в действии при неравенстве напряжений; - Обеспечение широкого диапазона скольжения без отказов действия и без появления погрешностей.
")
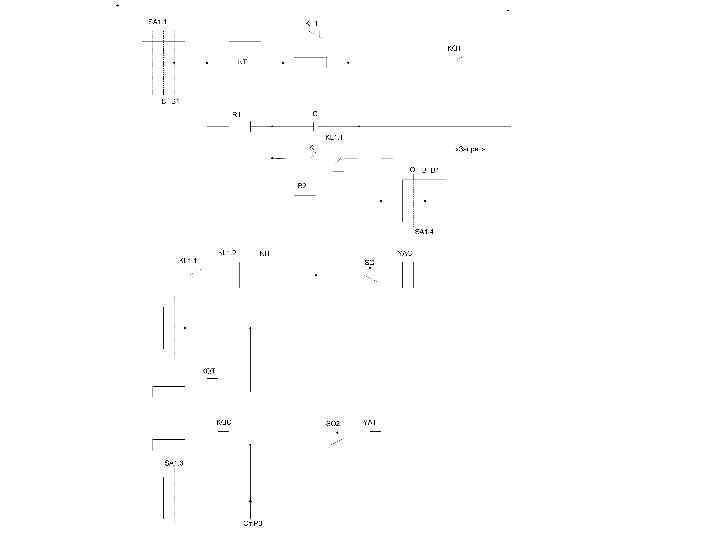
Полуавтоматический синхронизатор с постоянным углом опережения (КА-11/13)
")
Полуавтоматический синхронизатор с постоянным углом опережения (КА-11/13)

Принцип, заложенный в этом устройстве, используется при построении АПВ с улавливанием синхронизма на линии с двухстороннем питанием. Данный синхронизатор позволяет производить включение выключателя генератора с заданным углом опережения (постоянным) при условии, что ωS<ωSДОП. Постоянный угол опережения задаётся с помощью реле напряжения KV 2. KV 1 совместно с KV 2 и КТ позволяет контролировать частоту скольжения. Принцип контроля ωS построен на измерении времени снижения напряжения биения от величины UСР. KV 1 до величины UСР. KV 2. t. К – контролируемое время (задаётся на КТ).

Недостатки синхронизатора: Т. к. оп = const, то при уменьшении ωS будет увеличиваться t. ОП, следовательно контакты выключателя будут замыкаться не в 0, а в другие моменты. При ωS 0 угловая ошибка стремится к заданному углу опережения и в пределе: ош. = оп. Тогда максимально допустимый угол опережения определится через максимально допустимый ток включения: Небольшой задаваемый угол опережения обуславливает и небольшие допустимые угловые частоты. Таким образом, при s = sт. в. = s расч контакты выключателя замкнутся в момент оптимума ( ош=0). При меньших значениях угловой частоты скольжения включение будет производиться с угловой ошибкой.

Однако можно увеличить частоту скольжения при соблюдения условия, что IВКЛ<IМАХ. ДОП, в два раза, т. е. s max = 2 s т. в: При такой частоте скольжения выключатель замкнет свои контакты также с угловой ошибкой, равной оп = max. доп. Пояснить… Уставки синхронизатора рассчитываются по следующим выражениям:

- для s max = 2 s т. в. Контрольное время tк принимается примерно равным 0, 3 -0, 4 сек.
 Этот синхронизатор более совершенен, т.")
Синхронизатор с постоянным временем опережения. (АСТ – 4, УБАС) Этот синхронизатор более совершенен, т. к. он имеет , а δОП пропорционально зависит от ωS. Угловая ошибка при включении δОШ : Если t. В. В. =t. ОП, то δОШ→ 0 В действительности: где Δt. СА, Δt. В. В. – разброс по время опережения синхронизатора и времени включения выключателя соответственно. (Сравните с КА-11/13:

Этот синхронизатор будет иметь большее значение максимально допустимой скорости скольжения. При заданном t. ОП исходной предпосылкой является неизменность ωS. В реальных условиях неизменным можно считать а. S – ускорение скольжения. Структурная схема:

БВО – блок задания времени опережения. УКС – устройство контроля скольжения. УКН – устройство контроля напряжения. ЛЧ – логическая часть (контролирует соблюдение условий синхронизации, и по определённому алгоритму выдаёт сигнал на включение выключателя). БПС – блок подгонки скорости (формирует импульсы заданной интенсивности, воздействующие на МУТ). МУТ – механизм управления турбиной.

Блок задания времени опережения Обозначить координаты…

где К 1, К 2 – коэффициенты пропорциональности, t 0 = TS – t. ОП. Учитывая, что : Заменив tg его аргументом, получим: Вывод: t. ОП пропорционально отношению двух коэффициентов и не зависит от ωS.

Схема БВО В качестве органа опережения используется поляризованное реле с двумя катушками. В реле используются переключающиеся контакты:

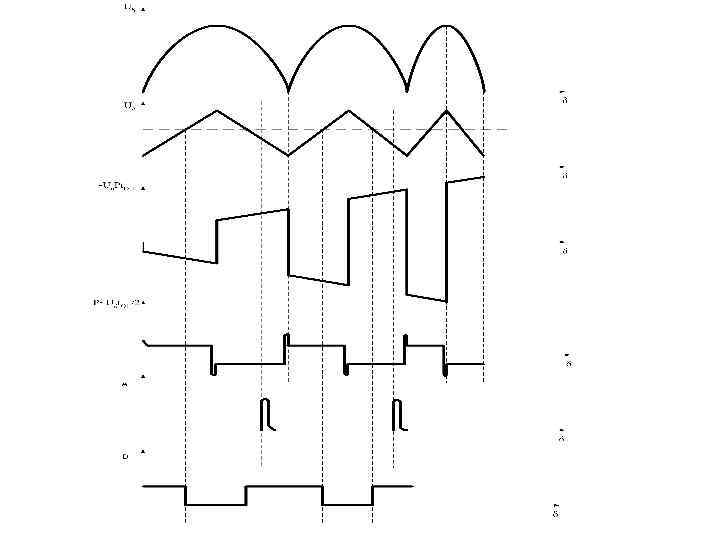
Принцип действия УКС В АСТ – 4 имеется орган опережения по углу с возможностью регулирования уставки Схема органа опережения по углу: Rрег VD RS КЧ US C При заданном расчетном скольжении и времени включения выключателя напряжение возврата КЧ, регулируемое с помощью сопротивления Rрег. , должно быть равно При углах, больших расчетного (Us>Uвкч), замкнут замыкающий контакт этого реле КЧ 2.

Принцип действия УКС Контроль скольжения осуществляется совместно двумя органами – органом опережения по времени и органом опережения по углу. При снижении напряжения биения до Uвкч происходит переключение контактов реле КЧ (КЧ 1 замыкается, КЧ 2 размыкается).

Контроль напряжения осуществляется поляризованным реле КН, включенным на выпрямленное напряжение по следующей схеме: Контроль равенства напряжений осуществляется при угле δ=1800.

Логическая часть

Принцип действия БПС Его задача: определить знак скольжения и выработать импульсы, обеспечивающие пропорциональность регулирования частоты. Для определения знака скольжения используется второе напряжение биения USAC, сдвинутое относительно исходного USAА на угол 600. fг > fc 00 fг < fc

УЧ ПЧ

Недостатки АСТ-4 - Данный БПС сводит ωS к 0, это может привести к затягиванию процесса синхронизации, т. к. при очень малых скольжениях синхронизатор отказывает в действии. - Чувствительность синхронизатора к несходству амплитуд синхронизируемых напряжений. БПС при большой разнице синхронизируемых напряжений может отказать в действии по причине невозврата в исходное состояние. - При больших ΔU возрастает погрешность в определении t. ОП и возникает угловая погрешность включения, т. к. форма огибающей Us сильно искажается. В случае ΔU>10% действие синхронизатора запрещается. - Не учитывается ускорение скольжения … Дополнительная ошибка

В области малых скольжений отказывает в действии БВО (суммарная НС не проходит через ноль, особенно при малых tвв) Небольшой предельно допустимый угол опережения оп. м. д. при больших значения tвв приводит к ограничению s м. д. :
. Напряжение биения здесь")
Синхронизатор СА-1 Этот синхронизатор выполнен с использованием электронных компонентов (цифровые микросхемы). Напряжение биения здесь не используется. С помощью специальных фазочувствительных схем и активных низкочастотных фильтров формируется Uδ, линейно зависящее от угла δ и не зависящее от несходства амплитуд синхронизируемых напряжений. Благодаря высокой линейности преобразования удаётся дважды дифференцировать Uδ и учитывать ускорение.

оп При определении t. ОП предполагают, что

Условие срабатывания синхронизатора: Поскольку угол δ линейно определяется напряжением Uδ, то это выражение можно записать следующим образом: Учитывая ускорение - угловая частота в момент замыкания контактов выключателя; - угловая частота в момент срабатывания синхронизатора.

В отличае от АСТ – 4 в СА – 1 корректируют δОП. МАХ. ДОП с учётом ускорения: Для того, чтобы не допустить включения выключателя при невыполнении условий синхронизации в блоке предусматривается ряд блокирующих действие синхронизатора сигналов.

Структурная схема

ПФ – преобразователь функциональный, который формирует Uδ, зависящий от угла δ; БВО – блок формирования времени опережения. Реализует уравнение срабатывания синхронизатора. БЗ – блок запрета. Формирует запрещающие сигналы (по максимально допустимому углу, по предельному углу, по несходству амплитуд). – сигнал запрета по максимально допустимому углу опережения. Уставка может меняться от 100 до 1200 с интервалом 100. - сигнал запрета по несходству амплитуд и по предельной угловой частоте скольжения. - сигнал запрета по ΔU и предельному углу опережения. F 1 (F 2) – команда на включение выключателя. БЛ – блок логики. Контролирует соблюдение условий синхронизации, при наличии сигнала А формирует сигнал на включение выключателя.

БПС – блок подгонки скорости. Определяет знак скольжения, формирует импульсы определённой длительности, т. е. выполняется требование пропорциональности управляющего воздействия. Отличие работы БПС заключается в том, что БПС не сводит частоту скольжения к нулю. f. S. Н. -f. Sуст. +f. S 0 -f. S min +f. S min f. Sуст.

Преимущества СА-1 - Максимальное значение угла опережения может достигать 1200 - Существенно больше рабочий диапазон частоты скольжения (1 Гц), что в 4 -5 раз выше, чем у АСТ-4; - Этот синхронизатор безошибочно работает при значительном неравенстве входных (25% - 30%) напряжений; - Smin , при котором синхронизатор отказывает, в 2 -3 раза меньше.

Микропроцессорные автоматические синхронизаторы Цифровые синхронизаторы типа "АС-М" и "Спринт" выполняют те же основные функции с выдачей через дисплей (АС-М) или индикатор информации о состоянии синхронизатора и генератора, производят контроль и диагностику, анализ достоверности выдаваемой информации. Основная вычислительная часть АС-М реализована на однокристальной микро ЭВМ (КМ 1816 ВЕ 51, fтакт. =11 МГц), "Спринт"- на микропроцессоре типа 18108 ВМ 88. Есть ОЗУ, ПЗУ. Модификация АС-М 2 обеспечивает включение в сеть сдвоенного блока. Основные функции: - формирование импульсов для регулирования частоты (+F, -F), воздействуя на МУТ;
, воздействуя на АРВ; - формирование импульса \"Вкл. \" с")
- регулирование напряжения (+U, -U), воздействуя на АРВ; - формирование импульса "Вкл. " с заданным временем опережения при достижении условий точной синхронизации. Для выключателей с различным временем включения предусмотрена возможность выбора одной из 3 -х уставок tоп. Импульс "Вкл. " Формируется в момент, когда угол станет равным расчетному значению. Расчетный угол зависит от tоп, S. После включения выключателя работа АС прекращается (но может быть несколько попыток). Дополнительно производится: - индикация состояния АС и синхронизируемого генератора. Средства индикации –на светодиодах и на 7 -и сегментном индикаторе. На светодиодах +F, -F, +U, -U, завершение регулирования, имп. "Вкл. ", состояние Q. Индикатор действует как синхроноскоп;

- контроль и диагностика отказов с выдачей кодов неисправностей; - настройка с помощью ПК с оперативной системой Windows; - сохранение параметров режима и управляющих воздействий в энергонезависимой памяти для последующего воспроизводства процесса синхронизации на ПК; - имеется режим ручного и автоматического тестирования для проверки аппаратных средств; - ПО имеет модель объекта регулирования (обучающая система и для предварительного выбора параметров настройки); - для АСУ ТП - порт связи RS-485.

Автоматическое включение синхронных двигателей и синхронных компенсаторов Различают: Прямой пуск синхронного двигателя; Реакторный пуск синхронного двигателя.
, протекает пусковой ток, двигатель невозбуждённым начинает")
При пуске включается Q 2 (Q 1 отключен), протекает пусковой ток, двигатель невозбуждённым начинает раскручиваться под действием асинхронного момента, который обусловлен наведением токов в пусковой клетке и в бочке ротора. Ток статора невелик – (3 -4) Iном. По мере разворота возрастает противодействующая ЭДС и пусковой ток снижается. При токе 1. 2 IНОМ включается Q 1, шунтируя пусковой реактор. На статорную обмотку подается полное напряжение, снова возрастает пусковой ток после чего быстро затухает. Этот процесс автоматизирован. После включения Q 1 включается АГП, подаётся возбуждение. В момент включения невозбуждённого СД на ротор действуют: МАС. П. – асинхронный момент, обусловленный токами, циркулирующими в пусковой обмотке и в бочке ротора. МАС. В. – обусловленный наличием одноосной обмотки возбуждения, которая замкнута на возбудитель. При большом скольжении МАС. В. не влияет на пуск СД, т. к. он подавляется МАС. П. . МС – момент сопротивления рабочего механизма.
 значение Мас. в")
Мас. в 1 2 1 S 0, 5 0 Отрицательное (тормозящее) значение Мас. в в области скольжения S=0, 5 мало по сравнению с Мас. п и не влияет на пуск. Но в области S 0 Мас. в оказывает влияние на успех втягивания СД в синхронизм (тем более, что крутизна характеристики Мас. п в этой области меньше, чем у СК. Наличие Rдоб в цепи обмотки возбуждения растягивает пик характеристики, но снижает её пик в области малых скольжений.

М 4 2 3 4 1 S=1 Sу2 Sу1 S=0 1 – Мас. п ; 2 – Мас. в ; 3 - М ; 4 – МС. Если момент сопротивления изменяется по кривой 4 , то двигатель не сможет достичь подсинхронной скорости и втягивания в синхронизм не произойдет. Возникнет длительный асинхронный режим с Sу2. Втягивание в синхронизм в этом случае возможно путем разгрузки механизма или повышения ординаты пускового момента. В схеме реакторного пуска – путем шунтирования реактора. Это делается автоматически.

Другая возможность увеличения суммарного пускового момента состоит в увеличении активного сопротивления контура ротора СД путем включения на время пуска активного сопротивления Rдоб = (35 Rрот). Но это нежелательно. Для СК этот вопрос не актуален, т. к. они не имеют нагрузки на валу и асинхронный момент у них выше. При реакторном пуске разворот происходит при пониженном моменте, поэтому Sу достаточно велико. Необходимо сначала шунтировать реактор, затем при меньшем Sу - подать возбуждение. При небольшой пусковой нагрузке шунтирование реактора и подача возбуждения могут производиться одновременно. Команда, как правило, осуществляется от минимального реле тока – по току статора. Для защиты от затяжного асинхронного хода с возбуждением (невтягивание в синхронизм, выпадение из синхронизма при близких КЗ) предусматривается защита с зависимой выдержкой времени.
. При этом")
При перерывах питания СД быстро затормозится (в т. ч. при АПВ, АВР). При этом возбуждение СД автоматически форсируется и при восстановлении питания СД может испытывать недопустимые воздействия. Во избежание этого СД заранее автоматически либо отключается (возможно и по технологическим соображениям), либо возвращается в пусковое состояние с погашенным полем возбуждения и снижением (если необходимо) нагрузки – режим ресинхронизации. Режим ресинхронизации применяют и при выпадении СД из синхронизма без потери связи с ИП. Признак – появление в цепи ОВ переменного напряжения с частотой скольжения.

При больших скольжениях двигатель может долго входить в синхронизм. Чтобы этого не допустить можно: Снизить крутизну МАС. В. , путём включения в цепь ротора добавочного активного сопротивления; Увеличить напряжение питания СД, т. к. моменты пропорциональны квадрату напряжения; Разгрузить двигатель, если это возможно.

Автоматическое повторное включение Назначение АПВ: Большинство К. З. – однофазные, и большинство из них на ВЛ являются самоустраняющимися (в бестоковую паузу). Процент успешных АПВ на линиях 110 к. В выше, чем на линиях 35 к. В за счёт того, что на линиях 110 к. В применяются быстродействующие защиты. ПУЭ требует установки АПВ на всех ВЛ, на сборных шинах, и т. д. Классификация АПВ По воздействию на выключатель: ТАПВ; ОАПВ. По виду оборудования, на которое воздействует АПВ:

АПВ КЛ; АПВ трансформаторов; АПВ ВЛ; АПВ электродвигателей; АПВ сборных шин. По кратности действия: АПВ однократное (усп. 60 -80%); АПВ двукратное (усп. 10 -15%); АПВ трёхкратное. По способу выполнения: Механические; Пневматические; Электрические По быстродействию: Быстродействующие (не более 0. 5 с); Другие (более 0. 5 с).

По способу контроля напряжения: АПВ с контролем наличия напряжения; АПВ с контролем отсутствия напряжения. По способу контроля синхронизма (на линиях с двустороннем питанием): АПВ ОС – с ожиданием синхронизма; АПВ УС – с улавливанием синхронизма; НАПВ – несинхронное; БАПВ – быстродействующее. Существует ЧАПВ – частотное АПВ, действует на присоединениях, отключенных от АЧР, после восстановления частоты.

Требования к АПВ - Выдерживать заданную кратность; - По возможности иметь большее быстродействие; - Автоматически возвращать схему в исходное состояние после успешного АПВ; - Недействие после отключения выключателя персоналом; Недействие при оперативном включении линии на устойчивое К. З. Запрет действия АПВ от некоторых видов релейной защиты и автоматики; Иметь длительность импульса на включение, достаточную для надёжного включения выключателя.

Принцип запуска АПВ. Запуск выполняют двумя способами: По действию релейной защиты; По признаку несоответствия положения выключателя и предшествующей команды. При использовании малогабаритных ключей с тремя положениями (О Н В) для запоминания предшествующей команды применяют реле фиксации команд – двухпозиционных реле типа РП-8, РП-11.

о н в Двухпозиционное реле может находиться либо в положении включено либо в положении отключено при отсутствии питания.

Самовозврат однократного реле происходит в случае успешного АПВ. При двукратном АПВ: В первом цикле – не зависимо от успешности, во втором – только в случае успешного АПВ. Для однократного АПВ t. ВОЗВР. =15 -20 сек (tгот). Для двукратного во втором цикле t. ВОЗВР. =60 -120 сек. При однократном АПВ выключатель должен выполнить следующий цикл: О-В-О. При двукратном АПВ: О-В-О. Выдержка времени на срабатывание АПВ (t. С. А. ) обусловлена необходимостью деионизации дугового промежутка в месте повреждения оборудования. Время деионизации зависит от погодных условий и от класса напряжения: 35 к. В – 0. 08 с 110 к. В – 0. 17 с 220 к. В – 0. 25 с 500 к. В – 03 -0. 4 с

Кроме того, условием выбора времени срабатывания АПВ будет являться: 1. 2. 3. где t. ГП – время готовности привода. где t. Д – время деионизации. где t. ГВ – время готовности выключателя к повторному отключению К. З. (0. 3 сек). Для воздушных выключателей третьего условия не будет. Принцип выполнения АПВ РПВ – 58 – однократное. РПВ – 258 – двукратное. РПВ – 358 – на переменном оперативном токе. РПВ – 01 – однократное на микросхемах. РПВ – 02 – двукратное на микросхемах
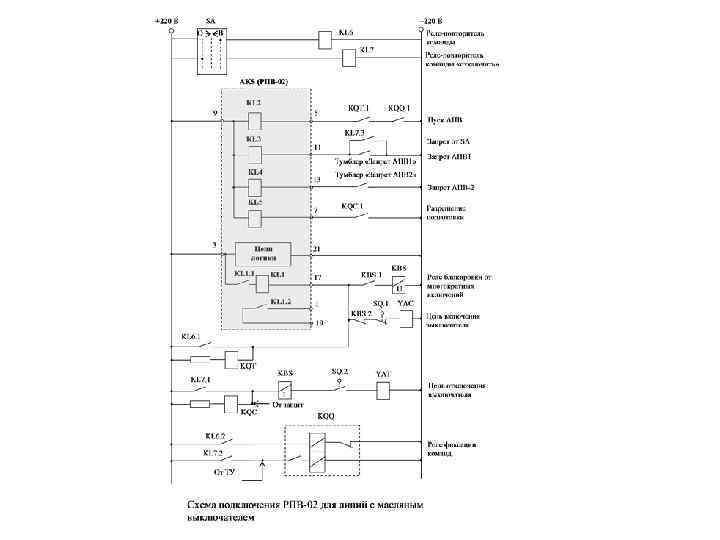

Реле РПВ-01 и РПВ-02 выполнены на интегральных микросхемах и на блоках унифицированной конструкции. Для гальванического отделения электронных цепей реле от источников входных сигналов и выходных цепей управления выключателем используются малогабаритные электромагнитные реле с герметизированными контактами (герконы) и выходное реле с двумя замыкающими контактами и дополнительной удерживающей обмоткой. Номинальные токи удерживающей обмотки реле: 0, 25 А, 0, 5 А, 1, 0 А, 2, 5 А и 4 А. Реле имеют по два поддиапазона дискретной регулировки уставок по времени: на первое повторное включение t 1, на второе повторное включение t 2 и на переход в состояние готовности tгот. Источником оперативного питания реле является постоянное или выпрямленное переменное напряжение 110 или 220 В. Диапазон отклонения напряжения (+10) %, (-20)%. Выходное реле содержит два контакта, в цепь одного из них включена удерживающая обмотка.

РПВ-01 РПВ-02 диапазон 0, 5…. 5 ступень 0, 25 диапазон - 5…. 50 ступень - 2, 5 15 и 30 30 и 60 диапазон 1…. 10 ступень 0, 5 диапазон - 10…. 100 ступень - 5 30 и 60 60 и 120 Величина 1 поддиапазон t 1, с t 2, с tгот. , с 2 поддиапазон t 1, с t 2, с tгот. , с

Характеристики срабатывания реле Управляющими сигналами для РПВ-01 являются: пуск, блокировка и разрешение подготовки. Управляющими сигналами для РПВ-02 являются: пуск, блокировка 1 цикла, блокировка 2 цикла, разрешение подготовки. При включении оперативного питания и наличии сигнала разрешения подготовки начинается набор выдержки времени tгот , по истечении которой реле готово к действию: РПВ-01 – однократно, РПВ-02 – двукратно. Если при наборе выдержки времени tгот. поступит сигнал пуска, то реле РПВ-01 не сработает, не сработает также и реле РПВ-02, если набор выдержки времени tгот осуществлялся после действия реле в обоих циклах. Если после успешного действия РПВ-02 в первом цикле вновь поступит непрерывный сигнал пуска до истечения выдержки времени tгот , то реле сработает по истечении t 2 во втором цикле. Набранная выдержка tгот. сбрасывается, повторный набор её начинается после снятия сигнала пуска.

По истечении времени tгот. реле возвращается в исходное состояние. Набор времени tгот. возможен только при наличии сигнала разрешения подготовки. Если при наборе выдержки времени t 1 сигнал пуска исчезает, набранная выдержка времени сбрасывается и её повторный набор возможен при появлении непрерывного сигнала пуска. Для РПВ-01 и раздельно для каждого цикла РПВ-02 при наличии сигнала блокировки независимо от существования других сигналов – все выдержки времени сбрасываются и реле не срабатывает. После исчезновения сигнала блокировки и при наличии сигнала разрешения подготовки (при отсутствии сигнала пуска) производится набор времени готовности. Если сразу же после исчезновения сигнала блокировки существует сигнал пуска, то реле не срабатывает и набор tгот. не производится. При этом в случае появления сигнала блокировки одного цикла реле РПВ-02 сохраняет возможность срабатывания по другому циклу.

Ускорение защит Различают: Ускорение защит после АПВ; Ускорение защит до АПВ. НЗ Принцип ускорения «После АПВ»

НЗ – неселективная защита. СЗ – селективная защита. Установка НЗ на головном участке сети позволяет ускорить действие защиты. НЗ отстроена от К. З. в конце смежных элементов.

Поочерёдное АПВ t. СА 2=t. CA 1+Δt. К. З. в точке К 1: При поочередном АПВ короткие замыкания на линии L 2, если их чувствует неселективная отсечка L 1, отключаются без выдержки времени неселективными отсечками обеих линий одновременно. Так как заранее неизвестно, где произошло КЗ (на линии L 1 или на линии L 2), сначала от АПВ включается линия L 1.

Если отключение выключателя Q 1 произошло из-за КЗ на своей линии и это КЗ не устранилось за время бестоковой паузы, то линия снова должна отключиться без выдержки времени неселективной отсечкой и это отключение будет селективным. Если же отключение Q 1 было вызвано неселективным действием отсечки линии L 1 при КЗ на линии L 2, то АПВ линии L 1 будет заведомо успешным. Поэтому, чтобы линия L 1 осталась в работе после возможного неуспешного АПВ линии L 2, сначала нужно вывести из действия неселективную отсечку линии L 1 и затем повторно включить линию L 2. Если КЗ на линии L 2 не устранилось, то эта линия будет вновь отключена своей неселективной отсечкой, а линия L 1 останется в работе. Если же КЗ самоустранилось, то в работе останутся обе линии. Спустя время, достаточное для АПВ L 2, включения и отключения (при неуспешном АПВ) выключателя Q 3, неселективная отсечка линии L 1 должна быть снова введена в работу.

Исправление возможного неселективного действия защиты путем применения поочередного АПВ имеет недостаток, заключающийся в том, что на следующих от источника питания линиях приходится принимать возрастающую выдержку времени срабатывания АПВ. Кроме того, в течение некоторого времени в процессе АПВ линия L 1 защищается только максимальной токовой защитой, имеющей большую выдержку времени. Если в течение этого времени на ВЛ L 1 возникнет КЗ, хотя это и маловероятно, то устойчивость работы энергосистемы может нарушиться. Указанный недостаток отсутствует во втором способе исправления неселективного действия защит с ускорением до АПВ – применение АПВ с нарастающей кратностью по направлению к источнику питания. Рассмотреть….

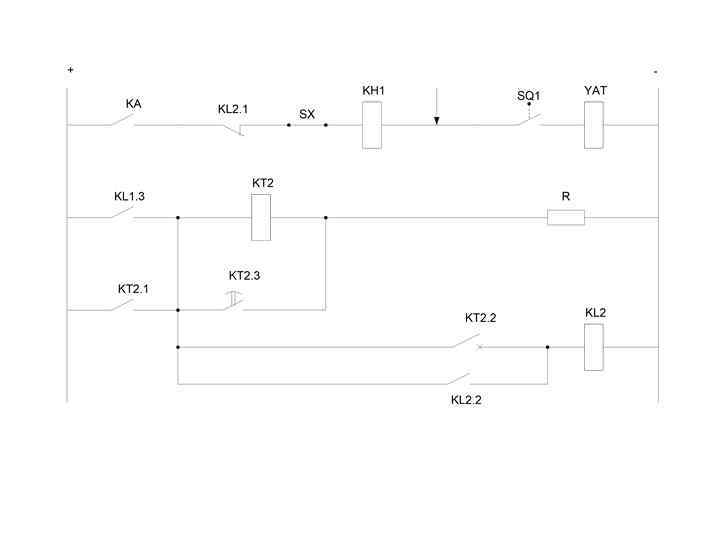
Время опробования рассчитывается по выражению: tопр. = tв. Q 1 + tо. Q 1 + t 1. Расчетное время срабатывания АПВ линии L 2 находится по выражению: tc, L 2 = tc, L 1 + tопр. + t 2, где t 2 = 0, 5 с. Время ввода в действие неселективной отсечки (время срабатывания конечного контакта КТ 2. 3 для схемы по рис. ) определяется по формуле: tввод = tc, L 2 tc, L 1 + tв. Q 3 + tо. Q 3 + t 3 = 0, 8 с

IL 1 tср. МТЗ В 1 I> KL 1 1 t Iср. МТЗ Ти=0, 2 с In 4 В 1 I> В 3 Iср. МТО S B 2 tопр T t R tввод. МТО t Алгоритм работы защит линии L 1 и поочередного АПВ в микроконтроллерном исполнении
")
Особенности АПВ параллельных линий с односторонним питанием На параллельных линиях (даже с односторонним питанием) АПВ предусматривается с обеих сторон. На таких линиях применяется однократное АПВ. На Q 2 – поперечная защита; на Q 1 – дистанционная защита. При к. з. в конце линии Л 1 - Q 1 отключится с выдержкой времени срабатывания второй ступени, а Q 2 без выдержки времени.

Выдержка времени АПВ 2 на Q 2 возрастает. Если вывести одну линию из действия, то можно вывести из действия АПВ 2. Если при параллельной работе двух линий произошло АПВ и оно было неуспешным, то нет смысла производить АПВ другого выключателя с противоположной стороны. Для этого АПВ выполняется с контролем наличия – отсутствия напряжения. Пуск АПВ на Q 1 производится при отсутствии напряжения на линии. Пуск АПВ на Q 2 – при наличие напряжения.

ТАПВ на линиях с двухсторонним питанием На линиях с двухсторонним питанием - АПВ с обеих сторон. Их действия согласованы по времени. АПВ только однократное. Если перед действием АПВ напряжение с противоположного конца линии синхронно (есть сильные параллельные связи, угол небольшой, обусловлен нагрузкой параллельных связей), то можно применять обычное АПВ без контроля синхронизма. При наличии 3 -х и более параллельных связей синхронизм, как правило, сохраняется. Применяют АПВ без проверки синхронизма. Необходимо, как и в предыдущем случае, согласовывать время действия АПВ с выдержками защит. Если АПВ с одного конца линии было неуспешным, то вероятность успешного действия с другой стороны мала, но для системы это – лишнее возмущение. Выполняют – с одной стороны с контролем отсутствия напряжения, с ругой – с контролем наличия. Принцип запуска затем меняют местами для выравнивания количества отключаемых выключателем токов КЗ.

АПВ ОС Если напряжения по концам линии не синхронно (связи либо слабые, либо их нет). В этом случае нужно определить вкл. и S доп. Для этого применяют различные виды АПВ с проверкой наличия синхронизма (иначе - с ожиданием синхронизма). Применяют тогда, когда нарушение синхронизма маловероятно, но возможно при наложении аварий. Включение производится при малых скольжениях.

КТ. 1

С одной стороны линия включается от АПВ с контролем отсутствия напряжения на линии, для этого предусматривается KV, подключённое к УОН со стороны линии. Сторона, с которой происходит опробование, выбирается накладкой SX. С противоположной стороны в цепь пуска АПВ дополнительно вводят размыкающий контакт реле контроля синхронизма KSS, реагирующего на геометрическую разность напряжений со стороны линии и со стороны шин. KSS – реле напряжения РН – 55, имеющее две обмотки, которые включены на одноимённые по фазе напряжения со стороны шин и со стороны линии. На протяжении размыкающие замкнуты. контакты KSS будут Если окажется, что при данном ωS - t. CA<tδ, то АПВ подействует!

Таким образом, при помощи KSS и реле времени устройства АПВ не только контролирует синхронизм, но и угловую частоту скольжения. Угол вр и ср выбираются больше наг, обусловленного нагрузкой параллельных связей при сохранении синхронизма. АПВОС выполняется по одинаковым схемам с обеих сторон. Сторона, с которой производится опробование, выбирается накладкой. НАПВ Несинхронное АПВ - наиболее простой вид АПВ на линиях с двухсторонним питанием, линия включается без ограничения по углу. Такое включение сопровождается значительными уравнительными токами с возможным асинхронным режимом, что может вызвать снижение напряжения на шинах параллельной работы.

Критерий допустимости НАПВ: В качестве критерия IУР. ГЕН. Относительно допустимых уравнительных токов при синхронизации генераторов – здесь условия не столь жёсткие, т. к. ток несинхронного включения протекая по ЛЭП будет распределяться между параллельно работающими генераторами. При формулировании требования допустимости НАПВ исходят из аварийного значения КМ (коэффициент запаса по эм. моменту): . Исходя из теоретического обоснования и расчётов, опыта и практики эксплуатации в настоящее время принято в качестве критерия:

- для ТГ с косвенным охлаждением и ГГ с успокоительным контуром. В левой части: относительное значение уравнительного тока, протекающего через генератор (принуждённая составляющая тока при включении с углом = π). - для ТГ с непосредственным охлаждением обмоток и ГГ без успокоительных контуров. - для синхронных компенсаторов. - для трансформаторов. При выполнении расчётов схему замещения сводят к виду:
 (Если ЛЭП – две параллельные линии, то берём")
Подпиткой от нагрузки можно пренебречь. (δ=π) (Если ЛЭП – две параллельные линии, то берём Хл, а не Хл/2) Если не проходит по критериям, то рекомендуется учитывать нагрузку как обобщенную: Е=0. 9 Хн=0. 35. Если известно, что U не меняется более 5%, то приведённые выше нормы могут быть увеличены: на 13% для ТГ на 35% для ГГ.

Кроме того, проверяется синхронная или результирующая устойчивость. Обычно это условие выполняется, особенно в концентрированных системах с преобладанием турбогенераторов (большой асинхронный момент, быстродействующие АРЧВ). Включение с разных сторон линии – поочередно, с контролем напряжения на линии посредством KSV (как и при АПВОС). При НАПВ возможны неправильные действия РЗ вследствие повышения токов, снижения напряжения, возможен асинхронный режим после АПВ, кратковременное появление U 2, U 0 (I 2, I 0).

БАПВ имеет минимально необходимую выдержку времени, при которой угол δ не успевает значительно возрасти. При БАПВ на энергосистему оказывается меньшее воздействие, чем при НАПВ, но есть ограничения в области применения: - БАПВ применяют, если на линиях установлены быстродействующие защиты с обеих сторон; - БАПВ применяют, если быстродействие выключателя не ограничивает по времени АПВ. - БАПВ применяют, если бестоковая пауза = 0. 35 -0. 5 секунд. При расчёте БАПВ нужно определить угол, на который разойдутся вектора одноимённых фаз. Пусть мощность передаётся из С 1 в С 2. Вектор U 1 опережает вектор U 2.
.")
Частота вращения генераторов более мощной системы неизменна, а тормозится менее мощная система (С 2). Происходит приращение угла δ за счёт торможения генераторов С 2. Будем считать, что частота вращения генераторов более мощной системы неизменна, а тормозится менее мощная система (С 2). Происходит приращение угла δ за счёт торможения генераторов С 2.

При выводе нужно учесть, что изменение частоты при возникновении небаланса происходит по экспоненциальному закону. Однако в начальной стадии переходного процесса можно, учитывая кратковременность процесса БАПВ (время 0. 5 секунд), принять линейный закон приращения угла (частоты) и процесс изменения частоты такой же, как при КЗ и при разрыве связи). Тj – постоянная времени механической инерции агрегатов С 2. где t. БП>tд. с.

Если РС 1 приблизительно равна РС 2, то необходимо определить два приращения угла: С 1 – избыточная, приращение Δδ 1; С 2 – дефицитная, приращение Δδ 2. Угол включения будет больше: Проверка допустимости БАПВ: 1) по условию допустимости по электромагнитному моменту. Для проведения по этому условию можно вычислить ΔЕ. Зная δвкл. и ΔЕ определить Iур между системами и воспользоваться той же методикой проверки как для НАПВ. Есть другие методы расчёта, которые состоят в следующем: По известным зависимостям определяется коэффициент Кδ

1 2 3 1 – ТГ с косвенным охлаждением; 2 – ТГ с непосредственным охлаждением; 3 – ГГ. Вычисляется по зависимостям определяется Кδ.
 условие сохранения динамической устойчивости:")
Используется вычисленное для НАПВ При БАПВ должно выполняться условие: 2) условие сохранения динамической устойчивости: По правилам площадей определяется динамическая устойчивость, если одно из условий не выполняется, то применяют АПВ УС.

АПВ УС Применяют на одиночных транзитных линиях или на линиях имеющих шунтирующие связи с недостаточной пропускной способностью. Выполняется как АПВ ОС, только в АПВ УС применяется более совершенное устройство контроля синхронизма. Также может использоваться реле KSS (реле напряжения с двумя обмотками, включенными встречно. Для расширения диапазонов углов (δср) одну обмотку включают на Uао, а другую – на -Uco. При этом возникнет дополнительный угол сдвига 600, т. е. δМАХ= 400+600=1000. Если включить одно реле на Uао, а другое – на Uас/1, 73, то дополнительный угол составит 300. Таким образом, имея реле с максимальной уставкой 400, можно расширить диапазон до 700 или 1000. Можно использовать два комплекта KSS, включенных на разные фазы для того, чтобы проконтролировать знак скольжения по аналогии БПС АСТ – 4. Эта информация может использоваться в устройствах противоаварийной автоматики для формирования управляющих воздействий противоаварийной автоматики.

Особенности выполнения АПВ шин и трансформаторов При КЗ на шинах отключаются все питающие присоединения. Для восстановления нормального режима предусматривается АПВШ. При этом назначается присоединение, которым производится опробование шин. Если оно успешно, то включаются поочередно другие отключенные присоединения. Опробование производится либо от питающего трансформатора, либо от питающей линии. Нельзя опробовать секционными выключателями и шиносоединительными выключателями. Если специальной защиты шин нет, то КЗ отключается защитами головных участков и восстановление напряжения производится АПВ этих выключателей. Специального АПВШ в этом случае не предусматривается.

Особенности АПВ шин: 1. СШ отличаются от линии тем, что при КЗ отключается много присоединений, следовательно, возникает вопрос, какими присоединениями опробовать шины. 2. При опробовании часто дифференциальная защита шин оказывается нечувствительной, следовательно, должна быть возможность повышения чувствительности в режиме опробования. Для этого в защите предусматривается дополнительный чувствительный орган. 3. После успешного опробования одновременно включать остальные выключатели нельзя (т. к. большая нагрузка на источник оперативного питания). Поэтому остальные присоединения включаются поочерёдно, из-за чего АПВ на последнем присоединении будет действовать с наибольшей выдержкой времени. Для снижения времени tca отключают не все присоединения, а только активные. Время срабатывания АПВ второго присоединения: tca 2 = tca 1 + t. ВВ + tca 1 + tca 2 + tзап.

4. Выбор присоединения для опробования. В устройствах АПВ для того, чтобы они действовали при КЗ на ВЛ и на шинах, предусматривается вторая (параллельная основной) пусковая цепь, содержащая размыкающиеся контакты реле напряжения, контролирующего наличие (отсутствие) напряжения на шинах. На выбранном присоединении для опробования используется размыкающий контакт (вводится накладкой), на других присоединениях в пусковой цепи АПВ используются замыкающие контакты. Если какие-то присоединения нежелательно включать после успешного АПВШ, то они блокируются от ДЗШ. Недостаток: в случае вывода линии опробования в ремонт оперативным персоналом нужно не забывать аналогичную накладку с размыкающимися контактами использовать на других присоединениях. Присоединения, которыми опробуют, не должно вызывать больших токов КЗ.
: - автоматическое опробование от заранее выбранного")
АПВШ возможно по одному из двух вариантов (ПУЭ): - автоматическое опробование от заранее выбранного присоединения с последующей ручной сборкой схемы; - автоматическое опробование и последующая автоматическая сборка схемы доаварийного режима путем АПВ других элементов. При наличии постоянного дежурного персонала предпочтение отдается первому варианту. Второй вариант – при отсутствии постоянного дежурного персонала. В этом случае при срабатывании ДЗШ АПВ присоединений не должны блокироваться. Если недопустимо НАПВ, то должны быть предусмотрены соответствующие меры. Опробование шин без контроля напряжения с использованием АПВ линий Для исключения многократного действия АПВ на устойчивое КЗ предлагают следующую схему:
 подготавливаются цепи блокировки АПВ всех")
Алгоритм: при действии диф. защиты шин (КЗ на шинах) подготавливаются цепи блокировки АПВ всех присоединений и блокировки срабатывания при повторном действии диф. защиты шин.

Реле KL 2 срабатывает после действия ДЗШ и своими контактами подготавливает цепи блокировки устройств АПВ присоединений, обеспечивающих АПВ шин. Если АПВ первого из присоединений будет успешным, то затем включаются остальные присоединения. Если нет, то срабатывает повторно ДЗШ и блокирует АПВ всех присоединений. Схема проста, не требует специальных операций при выводе в ремонт присоединения, выбранного для опробования. При такой схеме отказ АПВ первого присоединения не опасен, т. к. сработает АПВ второго (и т. д. ) присоединения. Если на ВЛ предусмотрен контроль наличия напряжении и синхронизма, то спец. блокировки при устойчивом КЗ не требуется. В схеме с контролем отсутствия напряжения для первого АПВ в случае вывода его в ремонт нужно производить оперативные переключения для оставшихся присоединений в работе.

Особенности АПВ трансформаторов Можно считать частным случаем АПВ шин, т. к. оно происходит после действии РЗ трансформатора, срабатывающей при КЗ на шинах или на питающейся от шин линии и отказе её защиты или выключателя. Если действует газовая или ДЗ, АПВ трансформатора, как правило, блокируется (при действии дуговой защиты, если трансформатор подключен к КРУ). Наиболее целесообразно АПВ на одиночном трансформаторе. Применяется АПВШ и на двух трансформаторных подстанциях с упрощённой схемой без обслуживающего персонала для максимальной автоматизации восстановления нормального режима работы. Функции: • восстановление нормального режима работы при КЗ на шинах НН; • восстановление нормального режима работы при КЗ на отходящих линиях НН при отказе их защиты или выключателей.
")
АПВ электродвигателей Для обеспечения самозапуска часть неответственных двигателей (а при необходимости – и ответственных) могут быть отключены при тяжелых условиях пуска. Для их автоматического подключения применяют АПВ ЭД. Устройство АПВ может быть дополнено реле напряжения, контролирующее величину напряжения на шинах. При срабатывании ДЗ ЭД производится запрет АПВ ЭД.
 В сетях высокого напряжения помимо ТАПВ применяется ОАПВ, т. к. доля")
Однофазное АПВ (ОАПВ) В сетях высокого напряжения помимо ТАПВ применяется ОАПВ, т. к. доля однофазных КЗ составляет 70 -90% от общего числа. Достоинства ОАПВ: • электрическая связь при отключении только одной фазы не прекращается полностью, что позволяет повысить устойчивость этой связи. Это особенно важно для протяжённых линий связи, а также для одиночных транзитных линий связи; • повторное включение происходит с меньшим возмущением, т. к. не будет уравнительных токов; • при ОАПВ одиночных линий с односторонним питанием потребитель не обесточивается полностью. При допустимости неполнофазного режима возможно сохранить электроснабжение при устойчивом КЗ; • меньшее количество операций каждым выключателем.
; • необходимость")
Недостатки ОАПВ: • усложнение устройств ОАПВ (должны быть предусмотрены избиратели повреждённых фаз); • необходимость пофазного управления выключателем; • усложнение релейной защиты в случае перевода линии на неполнофазный режим работы; • неблагоприятное влияние несимметричного режима на генераторы и другие элементы; • необходимость предусматривать ТАПВ. Функции ОАПВ: • выявление, отключение и последующее повторное включение повреждённой фазы при однофазном КЗ; • при неуспешном однократном АПВ производить либо отключение всех трёх фаз без последующего повторного включения, либо переводить линию в режим длительной работы двумя фазами, если такой режим допустим; • при повреждении в неполнофазном режиме работы производится отключение оставшихся фаз без всяких АПВ;

• производить отключение всех трёх фаз в случае отказа избирательного органа; • выводить из работы или адаптировать действие релейной защиты при переводе в неполнофазный режим работы. Время деионизации при ОАПВ больше, чем при ТАПВ. Избирательные органы Отключение поврежденной фазы осуществляется либо непосредственно ИО данной фазы, либо релейной защитой, действие которой переводится ИО на отключение поврежденной фазы. Для одиночных линий с односторонним питанием, как правило, на питающей стороне применяют токовые реле, включенные на фазный ток и отстроенные от максимального тока нагрузки, а на приёмной стороне - с использованием минимальных реле напряжения, включенных на фазные напряжения.

Схема избирательного органа, построенного на минимальных реле напряжения:

ИО срабатывает в случае возникновения однофазного КЗ, если в исходном состоянии все три фазы находятся во включенном состоянии: Uср =(0, 6 -0, 7) Uном. ф Для исключения ложной работы ИО при КЗ на линии, отходящей от шин питающей п/ст (например, Л 2), в схему введены реле тока КА 0, включенное на ток нулевой последовательности, и реле времени КТ. Ток срабатывания выбирается из условия надежного срабатывания при КЗ на Л 1. КТ – для отстройки по времени от быстродействующих защит других линий, отходящих от питающей подстанции. Блок-контакты выключателя необходимы для вывода из работы ИО после неуспешного цикла ОАПВ в том случае, если допускается работа ВЛ в неполнофазном режиме. Если не установлен TV 1, тогда в качестве избирательного органа применяют реле направления мощности косинусного типа, питающегося от TV 2. Токовые обмотки включены на 3 I 0, а поляризующие обмотки (обмотки напряжения) на линейное напряжение. Как правило, на приемной подстанции TV установлен с низкой стороны силового трансформатора, т. е. подключен к "треугольнику".
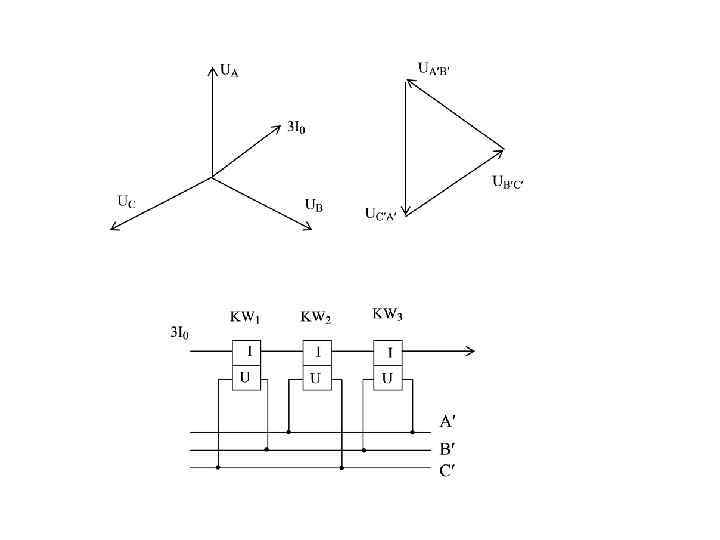

При этом учитывается, что определенному фазному напряжению со стороны "звезды" соответствует определенное напряжение со стороны "треугольника". Например, фазным напряжениям UA 0, UB 0, UC 0 со стороны "звезды" соответствуют междуфазные напряжения со стороны "треугольника": -UС А , - UА В , - UВ С. Для повышения избирательности действия контакты реле мощности включаются по схеме "И": При однофазном КЗ ток 3 I 0 направлен так, что если сработало первое реле, то третье надежно тормозится, то есть четко определяется поврежденная фаза.

На линиях с двусторонним питанием применяют дистанционные избирательные органы, имеющие направленную характеристику срабатывания. Смещение может быть как в первый квадрант, так и в третий. Реле сопротивления включено на фазное напряжение и фазный ток, компенсированный током нулевой последовательности, т. е. , где К – коэффициент компенсации, выражающий зависимость между Z 1 и Z 0. Одна обмотка трансреактора включена на IФ, другая через автотрансформатор – на 3 I 0. Это обеспечивает правильное измерение сопротивления от места установки реле до точки КЗ. Если характеристика реле сопротивления не охватывает начало координат, то избирательный орган не будет срабатывать при близких КЗ (близких к месту установки защиты). В этом случае избирательный орган дополняется токовым органом (отсечкой), либо реле напряжения:

Рассмотрим схему устройства ОАПВ питающего конца ВЛ с односторонним питанием. Допустим длительный режим работы двумя фазами при неуспешном ОАПВ. В качестве устройства ОАПВ используются те же изделия, как и в ТАПВ, только схемно-адаптированы.

Схема избирательного органа KLA, KLB, KLC – выходные промежуточные реле ИО; KL 2 – отключение трех фаз при 3 -х фазном КЗ.

Пуск АПВ Запрет ОАПВ отключении двух фаз при любых KL 3. 4 – обеспечивают возврат KL 1 УАПВ при неуспешном ОАПВ
 Назначение: В энергетической системе возможны возникновения дефицита активной мощности, вызывающего")
Автоматическая частотная разгрузка (АЧР) Назначение: В энергетической системе возможны возникновения дефицита активной мощности, вызывающего отклонение частоты. Снижение частоты, происходящее в результате отключения источников генерации, аварийного разделения энергосистемы на части, отключения питающих энергорайон линий, приводит прежде всего к снижению производительности СН ТЭС и АЭС или нарушению их нормальной работы, вследствие чего уменьшается мощность электростанций. Это приводит к ещё большему увеличению дефицита мощности и к ещё большему снижению частоты. При определенных условиях, начиная с некоторого момента времени, процесс снижения частоты носит лавинообразный характер – возникает так называемая "лавина частоты". Это приводит к развалу энергосистемы, полной остановке электростанций и отключению значительной части потребителей, что влечет значительный народнохозяйственный ущерб.

Другая опасность снижения частоты связывается с возможностью развития лавины напряжения, приводящей к массовому хаотическому отключению потребителей. Такие аварийные ситуации связаны с длительным отключением потребителей. Ликвидация последствий аварии занимает несколько часов. Снижение частоты влияет на работу электроприемников (снижается их производительность, возможно срабатывание технологической автоматики). Длительные глубокие снижения частоты недопустимы также по условиям работы паровых турбин. Резонансные явления, возникающие в лопатках турбины, приводят к накоплению усталостных напряжений… Предотвращение снижения частоты может быть возложено только на автоматику, поскольку длительность протекания этих процессов может составлять от десятков до нескольких секунд. Для предотвращения и ограничения развития аварий со снижением частоты применяют комплекс средств ПА. Основным из них является АЧР.

Основное назначение АЧР заключается в отключении части менее ответственных потребителей для сохранения в работе электрических станций, обеспечения безопасной работы АЭС, обеспечения надежного питания (по возможности) наиболее ответственных потребителей. Т. е. предотвратить снижение частоты ниже заданного уровня, а также обеспечить подъем частоты до уровня, обеспечивающим возможность автоматики восстановить нормальный режим работы энергосистемы. Частотные характеристики энергетической системы Различают: • статические характеристики; • динамические характеристики. Существуют статические характеристики нагрузки и статические характеристики генерирующей части. Статические характеристики нагрузки – это РН= (f) в установившемся режиме при U=const. Статические характеристики генерирующей части - РГ= (f) при U=const и Q=const (неизменном расходе энергоносителя). При этом генерирующая часть представлена эквивалентным генератором и турбиной при максимальном впуске энергоносителе.

На частоте 49 Гц все АРЧВ регулирующие органы турбины полностью открывают В этом случае РГ= (f) соответствует статической характеристике нерегулируемой турбины, которая в диапазоне частот 45 – 55 Гц приближается к квадратичной параболе с максимумом в точке f=50 Гц.

Статические характеристики нагрузки в различной степени зависят от частоты- от 3 -й и 4 -й степени (для центробежных насосов), до нулевой. Зная состав узлов нагрузки, можно получить суммарную характеристику при UН=const: где а 0, а 1, а 2, … - коэффициенты долевого участия различных видов нагрузки. РН 0 – общая нагрузка на частоте 50 Гц. Наличие зависимости нагрузки от частоты обеспечивает так называемый регулирующий эффект нагрузки (РЭН). Регулирующий эффект нагрузки характеризуется коэффициентом РЭН - КН :

Если принять f=f. Н, то КН – есть относительное изменение мощности на процент изменения частоты. Реально Совмещая статические характеристики нагрузки и генерирующей части системы, можно оценивать степень снижения частоты при различных дефицитах мощности. Динамические частотные характеристики Это есть зависимость изменения частоты при возникновении дефицита мощности от времени, т. е. f=φ(t) при: При равенстве РГ=РНАГР – установившийся процесс. При возникновении РН. Б на вал генератора будет действовать ускоряющий или тормозящий момент:

Тогда уравнение движения эквивалентного генератора: умножив получим: В операторном виде: обе части уравнения,

Здесь - постоянная времени механической инерции генераторов и нагрузки, отнесённая к мощности нагрузки РН 0; - РН. Б* - мощность небаланса, отнесённая к мощности нагрузки. 1. Если отсутствует РЭН (КН = 0), то РН. Б* = РН. Б*0 = const. В этом случае уравнение описывается интегрирующим звеном с коэффициентом передачи: При возникновении дефицита мощности частота линейно уменьшается (вплоть до нуля).

2. При КН>0 - передаточная функция апериодического звена первого порядка. - постоянная времени изменения частоты. 1/КН – коэффициент усиления звена.

Структурная схема апериодического звена: Решение этого дифференциального экспоненциальный характер. уравнения носит

Очевидно, что fmin зависит как от относительного дефицита, так и от КН. Если в переходном процессе отключить часть нагрузки, то fmin возрастет, что равносильно увеличению КН.

Лавина частоты Динамические характеристики построены из условия, что момент турбины остается неизменным или меняется при наличии вращающего резерва. В действительности при Ррез=0 и возникновении дефицита мощности снижается частота, но при этом снижается мощность турбин и электрическая мощность генераторов. Это может быть обусловлено снижением производительности механизмов СН при длительной работе на сниженной частоте (см. регулирующий эффект нагрузки), возможностью отключения части блоков технологическими защитами, действием режимной системной автоматики, разделением систем на части, неправильным действием оперативного персонала.

Рн 5 Рн 4 Р н 3 Рн 2 Рн 1 При неблагоприятном сочетании характеристик нагрузки и генерирующей части из-за снижения мощности турбин процесс может приобрести лавинообразный характер, когда небольшое снижение частоты f постепенно увеличивается и в определенный момент времени частота резко начнет снижаться (см. рисунок).
;")
Здесь: 1 -3 – статическая характеристика турбины при работе АРЧВ (регулировочный диапазон не исчерпан); 1 -4 – статическая При длительной работе на пониженной частоте начнёт снижаться вырабатываемая генераторами активная мощность, так как при понижении частоты снижается производительность механизмов в системе собственных нужд станции, снижается давление пара, паропроизводительность, снижается температура пара. Кроме этого возможны перегрузки ЛЭП и их отключение (дополнительные перегрузки).

Итак, под «лавиной частоты» понимают лавинообразное нарастание дефицита активной мощности и лавинообразное снижение частоты. «Лавина частоты» наступает, когда отсутствует пересечение РГ с РНАГР на статических характеристиках. fкр

Требования к АЧР и способы её построения 1. АЧР должна ликвидировать всё многообразие возможных аварий, связанных с дефицитом мощности. Начиная от местных, кончая общесистемными, независимо от величины дефицита, характера развития аварии и т. д. 2. АЧР не должна допускать снижения частоты ниже определённого уровня в течение определённого времени, т. е. обеспечивать предельно допустимую частотно-временную зону (47 Гц – 20 с, 48, 5 Гц – 60 с). Стандарт организации ОАО «СО ЕЭС» : (47 – 10 с, 49 – 40 с).

3. Объём отключенных от АЧР потребителей должен быть минимальным. АЧР должна вступать в работу после реализации вращающего резерва на ТЭС, а при его отсутствии РАЧР < РДЕФ; 4. Отключение нагрузки должно происходить последовательно, начиная с менее ответственных потребителей, сохраняя в работе ответственные; 5. АЧР должно не только предотвращать снижение частоты, но и обеспечивать повышение частоты до уровня, при котором энергосистема может функционировать нормально, при котором обеспечиваются условия работы других видов автоматики; 6. АЧР не должна срабатывать в переходном процессе, не связанном с дефицитом мощности (при синхронных качаниях, при асинхронном режиме, и т. д. ).

Принципы построения АЧР Для реализации этих требований АЧР выполняют большим числом очередей. Кроме того, АЧР делится на три категории: АЧР-I – быстродействующая разгрузка (без выдержки времени), состоит из большого числа очередей, действующих с различными уставками по частоте. f. НАЧ = 48. 5 Гц, f. MIN = 46. 5 Гц, Δf = 0. 1 Гц. В АЧР-I может быть размещено до 26 очередей. АЧР – I предназначена для предотвращения снижения частоты ниже допустимого уровня. • АЧР-II – предназначена для повышения частоты. Действует с единой уставкой по частоте и с различными уставками по времени (Δt=3 c, t 1=5 -10 c), f. УСТ. АЧР-II=49 -49. 2 Гц. Конечное время - 70 -90 секунд позволяет ввести в действие мощности ГЭС. • АЧР-III – дополнительная категория. Предназначена для покрытия дефицитов мощности, возникающих в местных энергетических районах в тех случаях, когда действиями АЧР – I, в следствие инерционности, невозможно предотвратить снижения частоты ниже 45 Гц.

t f 1 f 2 f 3 f 4
 с для ИВЧ-3, для РЧ-1")
Уставка по времени АЧР-I – (0, 25 -0, 3) с для ИВЧ-3, для РЧ-1 в большинстве случаев достаточно имеет (0, 1 -0, 15)с по условию отстройки РЧ от режима синхронных качаний на уставках 47, 5 -49 Гц. Эффективность АЧР тем выше, чем меньше время срабатывания (лучше иметь tср=0). Но для предотвращения излишних срабатываний, например для ИВЧ-3, необходимо иметь выдержку не менее 0, 3 с (отстройка от переходных процессов в контурах реле при выдаче U или резких изменениях напряжения). Реле РЧ-1 лишено этих недостатков. Способы организации АЧР Организация АЧР – I и АЧР – II может быть выполнена двумя способами:

1. Раздельная организация АЧР – I и АЧР – II. При этом способе объёмы разгрузки под АЧР – I равномерно распределяются между очередями. Также объёмы разгрузки под АЧР – II равномерно распределяются между своими очередями. При таком способе организации, в зависимости от характера развития аварийной ситуации, может нарушиться очерёдность отключения потребителей. Так при медленно нарастающем дефиците снижение частоты и последующий подъем может осуществиться за счет действия АЧР-II. При этом нарушится пропорциональность между категориями разгрузки, будут задействованы последние очереди, к которым подключены более ответственные потребители. В других ситуациях из-за наличия запасов в объемах разгрузки прекращение снижения частоты и последующий подъем может осуществиться очередями АЧР-I. В обоих случаях отключаются ответственные потребители последними очередями либо АЧР-I, либо АЧР-II, а менее ответственные, подключенные к первым очередям, остаются в работе.
. Позволяет уменьшить запасы объемов разгрузки")
2. Совмещение очередей категорий I и II (комбинированный пуск). Позволяет уменьшить запасы объемов разгрузки при сохранении её гибкости и эффективности. Выходные органы соответствующих очередей I и II категорий подключаются к одним и тем же потребителям. Если при раздельном способе объем разгрузки АЧР-II составляет РII = 0, 4 РI , то при втором способе организации очереди АЧР-II действуют на те же нагрузки, а раздельно к очередям АЧР-II необходимо подключить только 0, 1 РН 0. Второй способ уменьшает количество потребителей, подключаемых к устройствам АЧР и поэтому считается желательным, чтобы такой пуск имели бы 100% очередей АЧР-I (или, в крайнем случае, более 50% с более высокими fср) Пусть имеем ряд потребителей: А, Б, В, Г, Д, Е, Ж, З, Н (потребители написаны в порядке значимости: Н – менее ответственный).

1’ 1 2 3 4 5 6 7 2’ 3’ 4’ 5’ 6’ 7’

Из рисунка видно, что при таком способе организации затягивается процесс восстановления частоты. Выход из ситуации: Часть потребителей подключать отдельно к очередям АЧР – II, а остальные совместить. Не совмещают 10% потребителей. 1’ 1 2 3 4 5 6 7 2’ 3’ 4’ 5’ 6’ 7’

Дополнительная категория разгрузки В отдельных энергосистемах или районах возможно возникновение больших дефицитов мощности и быстрое снижение частоты (и напряжения). Это характерно для случая местных дефицитов и маловероятно в крупных энергосистемах. Поскольку АЧР-I срабатывает не мгновенно, то при больших Р происходит глубокое (может быть и кратковременное) снижение частоты. На рисунке приведены результаты расчета при Рдеф. =70%, РАЧР-II= 28%. Кроме того, ИВЧ дает повышенные погрешности при снижении напряжения или вообще может отказать в действии. То есть АЧР оказывается неэффективным. Снижение частоты ниже 45 Гц не допустимо даже кратковременно! Полное время отключения при использовании РЧ-1: tоткл. =tр+tрв+tов. tр= 0, 15 -0, 2; tов=0, 15 -0, 2; можно специальную задержку не предусматривать, т. е. tрв=0 с. Тогда время отключения может составить около 0, 3 -0, 4 секунд. Для реле ИВЧ дополнительно вводится задержка tрв=0, 2 -0, 5 с. В этом случае полное время отключения составит 0, 5 -0, 8 с.

46 45 44 Как определяется необходимость применения дополнительной категории разгрузки? Есть зависимости предельно допустимых значений дефицитов мощности РГ. ПРЕД. доп* по условиям предотвращения снижения частоты ниже 45 Гц при работе АЧР от t. ОТК. , КН, г, н. Вращающего резерва нет, объем разгрузки распределен равномерно.
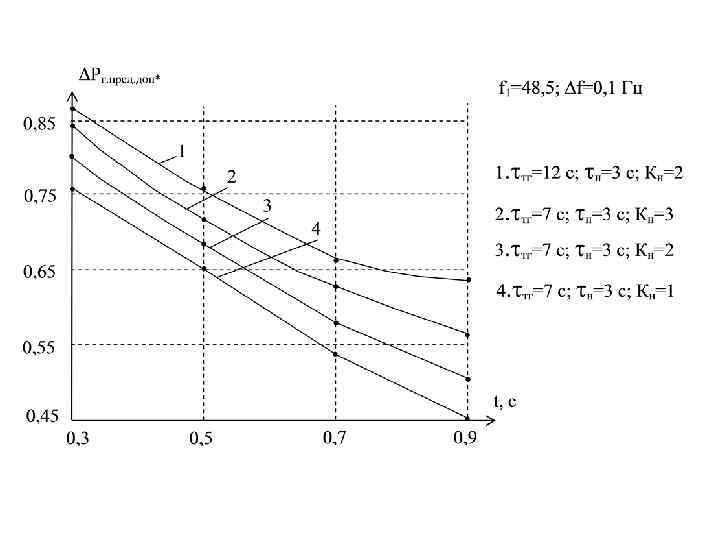

Если возникший дефицит мощности Рдеф. >Рг. пред. доп*, то даже при работе АЧР-I возможно снижение частоты до 45 Гц. В этом случае должна быть предусмотрена дополнительная разгрузка. Эти характеристики показывают, что при увеличении времени отключения предельно допустимое значение мощности снижается. Дополнительная разгрузка в ряде случаев устанавливается и тогда, когда одновременно с дефицитом мощности в крупных узлах нагрузки возникает дефицит реактивной мощности, что влечет "лавину напряжения". Дополнительную разгрузку, как правило, следует выполнять по факторам, характеризующим возникновение местного дефицита независимо от изменения частоты: Отключение агрегата, линии или трансформатора с контролем величины и направления мощности в предшествующем режиме; Наброс или изменение направления мощности по ВЛ, АТС; По фактору одновременного снижения частоты и напряжения; По фактору скорости снижения частоты, т. е. по

Для целей организации дополнительной разгрузки используют каналы ВЧТО. Основной фактор-быстродействие. Необходимо осуществить разгрузку в начальной фазе снижения частоты, до начала работы очередей АЧР-I. Дальнейший подъем частоты – за счет работы АЧР-II. Поскольку дополнительная разгрузка реагирует, как правило, не на f, а на другие параметры, то она не участвует в ликвидации общесистемных дефицитов, т. е. не может заменить АЧР-I(II). Установленный объём разгрузки АЧР в дефицитном районе, где предусмотрена дополнительная разгрузка, определяется требованиями ликвидации общесистемного дефицита. Иногда дополнительную разгрузку и АЧР выполняют совмещенными, действующими на те же потребители

Расчёт АЧР Расчёт заключается в определении общего объёма разгрузки и последующего распределения по числу имеющихся очередей каждой категории разгрузки. Для этого производится анализ режимов в энергосистеме и выявляется максимальный дефицит (РДЕФ. МАХ*). Порядок расчета Рассматриваются следующие режимы: • Отключение наиболее мощного генератора или блока, либо секции сборных шин для изолированно работающих станций. • Для энергосистемы рассматривается отключение станции целиком, причём, если имеется ТЭЦ с поперечными связями по пару, то рассматривается отключение всех генерирующих частей станции с сохранением нагрузки на генераторном напряжении при аварии в котельном цехе. • Отключение питающих линий. При наличии слабых связей – отключение генерирующих мощностей и последующее отключение этих связей вследствие наброса мощности сверх предела устойчивости (для частей энергосистем).
. Мощность нагрузки,")
• Разделение на части энергосистем вследствие отключения межсистемных связей (для ОЭС). Мощность нагрузки, подключаемая к очередям АЧР, определяется максимальным из возможных дефицитов мощности в данном районе. Рекомендуется анализ вести, начиная с местных аварий, и заканчивать общесистемными. Расчётные выражения при раздельном выполнении АЧР-II: , Причём при размещении нагрузки, подключенной к АЧР – II, необходимо это условие выполнять для каждого района или узла, где возможен дефицит.
: Не совмещенная часть АЧР – II Остальные очереди выполняют")
При выполнении совмещенными АЧР-I (II): Не совмещенная часть АЧР – II Остальные очереди выполняют совмещёнными. В этом случае суммарный объем подключенной нагрузки составит: Далее определяется необходимость выполнения дополнительной категории нагрузки. Для этого определяется предельно допустимое значение дефицита мощности, при котором частота может снизиться ниже 45 Гц.

При отсутствии данных о параметрах системы в расчётах можно принять Дополнительную категорию ставят и тогда, когда возникает дефицит реактивной мощности, что может вызвать лавину напряжения. По электротехническому справочнику: TJ (с) PГ. ПРЕД. % при t. С. А. АЧР-I 0, 3 с 0, 5 с 0, 7 с 10 -12 65 -75 55 -65 45 -55 13 -14 75 -80 65 -70 55 -60 15 -16 80 -85 70 -75 60 -65

Здесь РДЕФ. 0, РН. 0. – начальная мощность дефицита и нагрузки. ЧАПВ Частотное автоматическое повторное включение предназначено для автоматического подключения нагрузок, отключенных АЧР. В ряде ЭС производят мобилизацию резерва мощности ГЭС – частотный пуск гидрогенераторов, перевод из режима СК в генераторный. Весь процесс может занимать 1, 5 -2 минуты. Необходимо автоматическое повторное включение отключенных от АЧР потребителей. На ЧАПВ возлагается также функция исправления ложной работы АЧР.
, потребители, вероятность")
К ЧАПВ в первую очередь подключаются ответственные потребители (отключаемые последними очередями АЧР), потребители, вероятность отключения которых велика (отключаемые первыми очередями АЧР), потребители на подстанциях без дежурного персонала. Доля нагрузки, подключаемая к ЧАПВ, зависит от местных условий (например, Ррез. ). Порядок подключения к ЧАПВ обратный по отношению к АЧР. Уставки по частоте должны быть немного выше, чем частота возврата по АЧР-II. После восстановления частоты выше уставки f. ЧАПВ запускается выдержка времени и срабатывает первая очередь ЧАПВ.

При ориентации на возможную ресинхронизацию ВЛ уставки ЧАПВ должны быть выше, чем частота, при которой происходит ресинхронизация или допустимо АПВУС. При "сильных" связях, когда пропускная способность ВЛ соизмерима с мощностью дефицитного района, допустимая частота скольжения может составить f. ДОП. =0, 5 1, 5 Гц.

При "слабых" связях, пропускная способность которых в несколько раз меньше мощности дефицитного района, f. ДОП. =0, 05 – 0, 2 Гц. Таким образом, для района с "жесткими" связями диапазон уставок ЧАПВ по частоте составит (49 50) Гц, со "слабыми" (49, 8 – 50) Гц. При наличии слабых связей есть проблема по осуществлению ЧАПВ. В этом случае применяют ЧАПВ с контролем изменения частоты, дающее более широкие возможности при малых значениях f. ДОП. ЧАПВ с контролем частоты должно обеспечить частоту в энергосистеме не ниже f. КОНТР. Если Таким образом, одна очередь ЧАПВ не должна производить изменения частоты в энергосистеме более чем на где f. ВОССТ – восстановившаяся частота в энергосистеме после действия ЧАПВ.

Как и АЧР, ЧАПВ выполняется очередями. Начальная выдержка времени после восстановления частоты 10 -20 секунд, конечное время – не лимитируется. Ступень между очередями составляет t≥ 5 с, чтобы исключить срабатывание последующей очереди, если частота начинает снижаться после срабатывания первой очереди. Полное время восстановления нормальной работы в энергосистеме составит около двух минут. Возможное построение алгоритма ЧАПВ с контролем частоты:

– выдержка времени действия ЧАПВ первой очереди. Это время необходимо для ввода резерва по мощности, осуществления ресинхронизации. В момент времени t 2 частота в энергосистеме превысила уставку ЧАПВ. В момент времени t 3 включился первый потребитель. При этом запускается другое реле времени с выдержкой времени τКОНТР, в течение которого происходит контроль частоты. Если частота изменяется по кривой 1, то действие другой очереди ЧАПВ разрешается; Если частота изменяется по кривой 2, то Все последующие очереди ЧАПВ сбрасывают отсчет времени до тех пор, пока частота не превысит f. ЧАПВ (первый потребитель не отключается);
, то есть ресинхронизация стала невозможной, устройство")
Если частота снизилась ниже f. КОНТ. (кривая 3), то есть ресинхронизация стала невозможной, устройство этой очереди вновь отключает без выдержки времени включенный ранее потребитель и частота повышается. Это позволяет затем включить последующие очереди. Таким образом, устройство с момента t 2 позволяет контролировать частоту в пределах допустимой зоны и не препятствует ресинхронизации. Однако при длительной ликвидации аварии возможно многократное включение и отключение потребителей. Для исключения этого ЧАПВ может выполняться однократным (или 2 -х, 3 -х кратным). Но тогда после срабатывания ЧАПВ и последующем отключении потребитель больше не включится автоматически, хотя он и ответственный… АПВ с контролем по частоте эффективно используют в сочетании с АЧР, в которых реле частоты изменяет уставку при срабатывании, и позволяет увеличить частоту до близкой к 50 Гц. Таким образом, можно реле частоты использовать и для АЧР и для АПВ с контролем по частоте.

Его цикл: уставка срабатывания АЧР – уставка срабатывания ЧАПВ – уставка контроля допустимой зоны – уставка срабатывания АЧР. Когда частота снизилась до f. АЧР, данная очередь срабатывает и уставка возврата реле частоты повышается до f. ЧАПВ.

При подъеме частоты выше этой уставки начнется отсчет времени 1, по истечении которого включится потребитель, а уставка реле частоты перестраивается на f. КОНТ. Если за КОНТ. Частота не стала ниже f. КОНТ. , то через этот период времени уставка вернется к значению f. АЧР. Если же за этот период частота станет меньше f. КОНТ. , то произойдет вновь отключение потребителей и уставка вернется к значению f. ЧАПВ с контролем изменения частоты позволяет автоматически за короткое время подключить всех отключенных от АЧР потребителей после восстановления питания энергодефицитного района, не допуская снижения частоты ниже f. КОНТ. Упрощенный вариант схемы, реализующей АЧР – I, АЧР – II и очередь ЧАПВ:

Реле-повторитель РЧ АЧР ЧАПВ Выходные цепи и шинки АЧР

При снижении частоты замкнется контакт KF, сработает KL 1. Если накладка замкнута – действует АЧР-I, срабатывает двухпозиционное реле KL 2 и контактом KL 2. 3 производит отключение. Если накладка разомкнута, действует АЧР-II. Контактом KL 1. 3 запускается моторное реле времени и с выдержкой КТ 1. 1 срабатывает АЧР. При этом также срабатывает KL 2, которое своим контактом KL 2. 7 подготавливает повторный пуск реле времени КТ, контактом KL 2. 5 переключает уставку реле частоты на f. ЧАПВ и разрывает цепь питания КТ (реле возвращается в исходное состояние). При повышении частоты до f. ЧАПВ контакт KF размыкается, KL 1 теряет питание и повторно запускается КТ (через контакт KL 1. 4). С выдержкой времени КТ 1. 2 действует ЧАПВ: переключается в исходное состояние KL 2 и контактом KL 2. 4 включает потребители. Если в режиме работы ЧАПВ частота вновь снизилась и РЧ сработает, то КТ возвратится в исходное состояние с последующим запуском после подъема частоты.
Автоматика управления.ppt