introductionautomatismeindustriel par [Www.cours-electromecanique].pptx
- Количество слайдов: 74



Automatismes industriels Les automates programmables

Sommaire Chapitre 1: définition d’automatisme 1_1 : exemple d’application d’api 1_2 : définition automatisme 1_3 : bute d’automatisation 1_4 : Historique 1_5 : fabriquant des automates Chapitre 2 : constitution générale de l’API 2_1: Architecture matérielle 2_2: fonctionnement 2_3: catégorie des API 2_4: les différentes partie d’une automate modulaire Chapitre 3: organisation d’un système automatisé de production 3_1: schéma de principe 3_2: les actionneurs 3_2_1: moteur électrique 3_2_2: vérin pneumatique 3_2_3: autres actionneurs 3_3: les pré actionneurs 3_3_1 les contacteurs 3_3_2 les relais 3_3_3 les distributeurs pneumatique 3_4: les capteurs 3_4_1 capteurs TOR 3_4_2 capteurs analogique 3_4_3 transmeteurs

Applications des automates programmables. • Commande des machines • Machines outil a commande numérique • Convoyage • Emballage • Machines de chantier, engin de levage

Applications des automates programmables. • Automatisme du bâtiment • • • Chauffage, climatisation Distribution électrique éclairage Sécurité, alarmes Régulation de Processus Chimie pétrochimie pharmaceutique Traitement des eaux Thermique, fours, métallurgie

Applications des automates programmables. • Contrôle de systèmes • Production et distribution d’énergie (électricité , pétrole, gaz) Transports (chemin de fer, routier, marine).

INTRODUCTION A L’AUTOMATISME Définitions: • Automatique : C’est l’ensemble des sciences et des techniques utilisées dans la conception et la réalisation des systèmes automatisés (SA). • Automatisation : C’est l’exécution automatique de tâches sans interventions humaines.

Définition Un Automate Programmable Industriel API : Automate programmable industriel ou, en anglais PLC : Programmable Logic Controller Est un appareil électronique de traitement de l’information (remplacement de logique à relais câblée)

Définition Effectue des fonctions d’automatisme programmes telles que: • • Logique combinatoire Logique séquentiel (Grafcet, bascules. . . ) Temporisation (T-on, T-off, minuterie, horloge. . . ) Comptage (totalisateur , compteur incrémenté décrémenté) Calculs numériques (+, -, /, x. . . ) Asservissement, régulation Permet de commander, mesurer et contrôler au moyen de signaux d’entrées et de sorties (numériques ou analogiques) toutes machines et processus, en environnement industriel.

Buts de l’automatisation • Pourquoi automatiser ?

Buts de l'automatisation • Élimination de tâches répétitives ou sans intérêt – Machine de fabrication • Simplifier le travail de l'humain – Toute une séquence d’opérations remplacée par l’appui sur un poussoir • Augmenter la sécurité – Éviter les erreurs (aboutissant parfois à des catastrophes) inévitables dans un travail répétitif.

Buts de l'automatisation • Proposer aux hommes des tâches valorisantes – Au lieu de chargement / déchargement de pièces sur une machine, offrir la possibilité de la contrôler voire programmer. • Accroître la productivité – Cadence de production soutenue – Pas de fatigue • Économiser les matières premières et l'énergie – Production plus efficace

Buts de l'automatisation • Superviser les installations et les machines – Vérifier l’état de fonctionnement de la machine et prévenir si une maintenance est nécessaire. – Augmentation de la disponibilité.
 qui créa en 1968, aux USA, le premier automate")
Historique C'est Modicon (entreprise américaine) qui créa en 1968, aux USA, le premier automate programmable. Son succès donna naissance a une industrie mondiale qui s'est considérablement développé depuis. ogrammable représente utomate aujourd'hui l'intelligence des machines et des procèdes automatisés de l'industrie, des infrastructures et du bâtiment.

Quelques fabriquants des automates dans le monde • Siemens ( S 7 -200, S 7 -300, S 7 -400, S 7 -1200, LOGO. . . ) • Schneider électrique (TSX 17/37/57, TSX micro , premium. . . ) • Rockwell Automation (micrologix 1200/1400, SLC-500, SLC 5000. . . ) • ABB (AC 500, AC 800 C, S 500. . . ) • Omron (ZEN , CPM 1 A/2 A/2 C, CS 1, CJ 1. . . ) • Mitsubishi (MELSEC FX 1 S/FX 1 N , série L , système Q. . . ) • Yokugawa (FCN, FCN-RTU, FCJ. . . )

Architecture matérielle d’un API

Architecture matérielle d’un API Un automate programmable est constitué de : Unité de traitement de l’information • (CPU) Processeur, unité arithmétique et logique • Mémoire contenant le programme • Mémoire contenant les données • Interface pour la programmation Interfaces pour les signaux d’entrée • Tout ou rien: 24 V DC • Analogiques: +/-10 V; 4. . 20 m. A; etc

Architecture matérielle d’un API Interfaces pour les signaux de sortie • Tout ou rien: 24 V • Tout ou rien à contacts • Analogiques: +/-10 V; 4. . 20 m. A; etc. Interfaces pour des fonctions spéciales • Comptage • Positionnement • Communication

Fonctionnement des automates Un automate exécute son programme de manière cyclique : • Lecture des entrées • Traitement du programme • Ecriture des sorties Le temps d’exécution d’un cycle est de l'ordre d'une vingtaine de millisecondes et est contrôle par une temporisation appelée chien de garde.

Fonctionnement des automates

Fonctionnement des automates Remarque: On peut choisir le mode d’ exécution des programmes utilisateur: • Fonctionnement cyclique. • Mode périodique. Le temps d’un cycle influence sur le temps de repense de l’automate.

Exemple d’une API

Catégories d’automates • Les micro automates Nombre d’entrées sorties fixe Généralement pas d’analogique ni de communication Remplacement de logique à relais • Les automates compacts 10 à 250 entrées-sorties Nombre d’entrées-sorties extensible par blocs Fonctions analogiques et communications limitées Petits automatismes, logique combinatoire et séquentielle

Type monobloc L +24 VD C N RUN ERR COM OUT COM 0 I/O 1 2 - IN COM 0 1 2 3 4 5 6 7 8 9 10 11 12 13 TSXO 7 I 0 1 3 2 3 4 5 6 7 8 9 10 11 12 13 0 1 O 2 3 4 5 6 7 8 9 OUT 4 COM 5 6 OUT 7 COM 8 COM 9 INPUTS 24 VDC EXTENSION OUTPUTS 2 A Ry. A B SG

Les automates modulaires • • • <4’ 000 entrées sorties par CPU Nombre d’entrées-sorties modulables Comptage Commandes d’axes Pesage Communications Sécurité Automatismes complexes, régulation numérique, asservissements

Type modulaire ALIMENTATION CPU INPUT

Rack pour automate modulaire Rack 6 positions Rack 10 positions

Alimentation automate modulaire Caractéristique : Tension fournie 24 v DC Courant choisie selon la consommation des modules utilisés. • Exemple TSY PSY 2600 M ALIM 100/240 VCA 26 W

CPU Caractéristique : ØVitesse possesseur ØMémoire de travail ØLes ports intégrés de communication ØLimitation systèmes ØNombre de modules , de rack. . . ØEnvironnement logiciel CPU 412 -1 MPI/DP siemens TSX P 57 2634 M Télémécanique
: Il est constituer des entrées")
Module d’entrée sortie Module entrée TOR (tout ou rien): Il est constituer des entrées physique logique La lecture d’état logique du signale se fait par la mesure de la tension d’entrée : § soit la tension au borne d’entrée est présente on dira que l’état logique est vrais I=1 § Soit la tension au borne d’entrée est absente on dira que l’état logique est faux I=0

Module d’entrée sortie Module entrée Analogique : Il est constituer des entrées physique analogique La lecture du valeur du signale se fait par la mesure de signale d’entrée ( tension , courant résistance ). Il est constitué d’ un convertisseur analogique numérique .

Module d’entrée sortie Module sortie Analogique : Il est constituer des sorties physique analogique qui fournie un signale ( tension, courant ) aux périphérique extérieur. Il est constitué d’un convertisseur numérique analogique.

Les systèmes d’entrés – sorties déportées • Flexibilité totale de la configuration Extension d’un automate modulaire Processeurs spécialisés, PC industriels Module sortie pneumatique • Lecture-écriture des entrée-sorties Par réseaux câblé ou sans fil.

Les systèmes d’entrés – sorties déportées te utoma le a Modu s sorties ée Entr Câble d liaiso e n es s sorti trée oire en ast 2 Access Tele. F

Architecture d’un système automatisé de production SAP
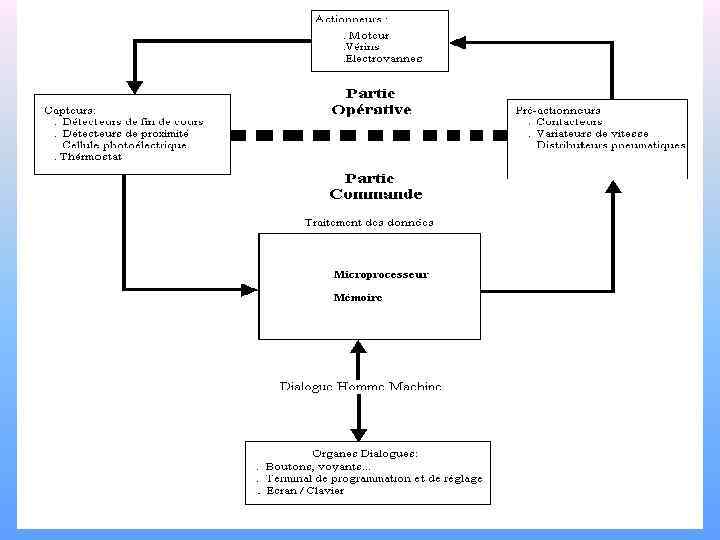

Les actionneurs Les capteurs Partie opérative Les préactionneurs Partie commande Traitement des données inf or ma tio ns Dialogue homme machine pupitre s O e rdr

Partie opérative/les actionneurs les Actionneurs électrique Le moteur à courant alternatif : Il existe deux sorte de moteur à courant alternatif: Ø En premier nous avons les moteurs synchrones qui sont utilisés pour les TGV aussi appelé alternateur quand il est utilisé comme générateur. Moteur synchrone Ø En deuxième on trouve le moteur asynchrone Qui ne possède aucune connexion entre le rotor et Le stator (cas rotor cage d'écureuil). Se moteur est essentiellement alimenter par des systèmes de courant triphasés. Moteur asynchrone

Partie opérative/les actionneurs • Les moteurs pas à pas Se sont des machines électrique Synchrone , ou le rotor est en aiment permanant , Et le stator constitue par des bobines commandés par un courant continu géré par un système électronique Avantage • • Sans balais Couple important même en petite vitesse Asservissement de position sans perte d’angle Vitesse important

Partie opérative/les actionneurs Une machine électrique à courant continu est constituée : D’un stator à base d’un flux de champ magnétique crée soit par des enroulements bobinée soit par un aiment permanent D’un rotor bobiné relié à un collecteur rotatif inversant la polarité de chaque enroulement rotorique.

Partie opérative/les actionneurs pneumatique Les vérins pneumatique : Ø il fournie une énergie mécanique à partir d’une énergie pneumatique Ø Ils produisent un mouvement de translation. Type des vérins : ü Vérin double effet ü Vérin simple effet üVérin linéaire üVérin rotatif

Partie opérative/les actionneurs Vérin simple effet Vérin linéaire Vérin rotatif

Autre actionneurs • Ventouses pneumatique : Très utilisée dans la manipulation d’objets. • vanne à commande: – Électrique (électrovanne) – Pneumatique – Hydraulique

Partie opérative/les actionneurs Exemple d’un bras rebot avec vérin pneumatique

Les pré actionneurs se sont des dispositifs intermédiaires pour la commande des actionneurs. v Les contacteurs et les relais: Le contacteur est un appareil électromécanique de commande mécanique de connexion, capable d’établir, de supporter et d’interrompre des courants dans les conditions normales du circuit, y compris les conditions de surcharges en services. Contacteur 4 pole

Les pré actionneurs La commande des contacteur se fait par l’alimentation électrique du bobine interne du contacteur. Une bobine

Les pré actionneurs Les relais se sont des interfaces de commande Il est chargé de transmettre un ordre de la partie commande à la partie puissance d'un appareil électrique et permet, entre autres, un isolement galvanique entre les deux parties. Type : ü Relais électromécanique ü Relais statique

Les pré actionneurs Relais électromécanique Schéma de principe

Les pré actionneurs Les relais statique : relais électronique à base de Photo coupleur qui assure l’isolement électrique des deux parties électrique.

Les pré actionneurs les distributeurs Pour chaque vérin pneumatique, on associera un distributeur. La commande du distributeur peut être pneumatique ou électrique. Les distributeurs sont constitués d’un corps contenant plusieurs orifices et d’un tiroir pouvant prendre plusieurs positions dont une seule est active. Le symbole d’un distributeur se présente sous la forme suivante

Les capteurs: source d’information ou l’acquisition des données

définition Un Capteur est un dispositif transformant l'état d'une grandeur physique observée en une grandeur utilisable Un détecteur est un dispositif technique (instrument, substance, matière) qui change d'état en présence de l'élément ou de la situation pour lequel il a été spécifiquement conçu.

Les capteurs Quelque principes physiques exploités par les capteurs : • Angle • Courant • Champ magnétique • Débit • Déplacement • Distance • Force • Inertiels • Lumière • Niveau • Position • Pression • Son • Température

Les capteurs tout ou rien Sur la majorité des systèmes automatisés, le traitement des données est effectué sur des variables de type logiques( informations sur 2 états). Ces variables représentent généralement : ü La présence ou l’absence de l’objet à détecter ü Le passage de l’objet ü Le positionnement de l’objet ü Éventuellement le comptage de l’objet

Les capteurs tout ou rien En fonction des application on distingue deux Types de technologies : Ø Les capteurs à détection avec contacte pour lequel l’objet à détecter entre directement en Contacte avec un élément du capteur Ø Les capteurs à détection sans contact, pour lesquels l’objet est détecter à distance par le capteur.

Les capteurs tout ou rien Les interrupteurs de positions sont des appareils actionnés par contact direct avec l’objet à détecter. Ils transforment ce contact physique en une fermeture ou ouverture d’un contact électrique. Le dispositif d’attaque ( à poussoir, à levier, à tige. . ) Le corps équipé de contact ( NO ou NF ) La tête de commande ( tête à mouvement rectiligne, angulaire ou multidirectionnel )

Les capteurs tout ou rien Le Détecteur inductif Les détecteurs inductifs sont des appareils capables de détecter des objets métalliques à distance. Une sortie statique informe de la détection

Les capteurs tout ou rien Un détecteur inductif se compose essentiellement d’un oscillateur dont les bobinages constituent la face sensible. A l’avant de celle-ci est crée un champ magnétique alternatif Après mise en forme, un signal de sortie, correspondant à un contact NO ou NF, est délivré.

Les capteurs tout ou rien Le détecteur capacitif Les détecteurs capacitifs sont des appareils capables de détecter des objets métalliques ou isolants à distance ( solide, liquide ou pulvérulent ). Une sortie statique informe de la détection.

Les capteurs tout ou rien Un détecteur capacitif se compose essentiellement d’un oscillateur dont les condensateurs constituent la face sensible. Celle-ci est formée par l’une des armatures du condensateur. L’autre armature étant constituée par l’objet à détecter. 6 Après mise en forme, un signal de sortie, correspondant à un contact NO ou NF, est délivré. 3 5 2 4 1

Les capteurs tout ou rien Les détecteurs photoélectriques sont des appareils capables de détecter des objets à très grandes distances ( quelques centimètres à plusieurs dizaines de mètres ). Ils se présentent sous la forme d'un boîtier avec ou sans réflecteur, ou de deux boîtiers; l'un émetteur, l'autre récepteur.

Les capteurs tout ou rien Principe de fonctionnement: Un détecteur de type barrage est composé d'un émetteur de lumière associé à un récepteur photosensible. Dans le cas du système barrage, les deux composants sont indépendants et placés l'un en face de l'autre. Emetteur Câble Récepteur

Les capteurs Les détecteurs de niveau Il permet le maintien d’un niveau à des points spécifiques (niveau haut et niveau bas) et alarme pour un niveau anormalement bas.

Les capteurs Fonctionnement des détecteurs de niveau Il existe différentes méthodes de mesure ou de détection de niveau, on peut en énumérer essentiellement trois: 1 - Méthodes hydrostatiques de mesure de niveau. 2 - Méthodes électriques de mesure de niveau. 3 - Méthodes fondées sur l’utilisation de rayonnements.

Les capteurs Le détecteur de pression Les pressostats et les vacuostats ont pour fonction de contrôler ou de réguler une pression ou une dépression dans un circuit hydraulique ou pneumatique. Ils transforment le franchissement d'une valeur de consigne de pression, en un signal électrique TOR ou Analogique. une partie hydraulique comprenant: • un ou plusieurs orifices pour le raccordement au réseau de fluide à contrôler • des systèmes de ressorts pour les différents réglages Les pressostats et vacuostats sont constitués de deux parties distinctes : • un capteur (membrane ou piston) qui reçoit la pression et transmet l’information à la partie électrique • une partie électrique comprenant des contacts ou une sortie statique.

LES CAPTEURS ANALOGIQUES Le fonctionnement des thermomètres à résistance et des thermistances est basé sur un même phénomène physique, à savoir la variation de la résistance électrique d'un conducteur avec la température. Mais comme ces variations sont différentes suivant qu'il s'agit d'un métal ou d'un agglomérat d'oxydes métalliques, deux cas ont été distingués sous les appellations de thermomètre à résistance d'une part et de thermistance d'autre part.

LES CAPTEURS ANALOGIQUES 1. 1 – Thermomètre à résistance La résistance électrique d'un conducteur métallique croit avec la température. Lorsque la température varie on a : T la température en °C Ro la résistance à 0 °C a, b et c des coefficients positifs, spécifiques au métal. • C’est le platine qui est le plus utilisé.

LES CAPTEURS ANALOGIQUES Exemple : La sonde Pt 100 est une sonde platine qui a une résistance de 100 pour une température de 0 °C. (138, 5 pour 100 °C) R 0= 100 pour t=0°C K=0. 4

LES CAPTEURS ANALOGIQUES 1. 2 – Thermomètres à thermistance La résistance électrique d'une thermistance est très sensible à l'action de la température. Il existe deux types de thermistance, les CTN ( Coefficient de Température Négatif, ) et les CTP ( Coefficient de Température Positif ). La loi de variation est de la forme : a et b sont deux paramètres de la thermistance.

LES CAPTEURS ANALOGIQUES 1. 3 - Comparatif La comparaison des variations de résistivité d'un fil de platine et d'une thermistance est faite sur la figure ci-dessous. On constate que non seulement les variations sont de sens opposé, mais aussi que la variation de la résistivité est beaucoup plus importante pour une thermistance que pour un fil métallique Un second avantage des thermistances est leur faible encombrement. Leur domaine d'utilisation va de -80 à +700 °C avec une précision de 1/10ème à un demi degré. Les thermistances ne présentent pas le phénomène de polarisation et peuvent être traversées indifféremment par un courant continu ou alternatif L'emploi des thermistances a donc des avantages de sensibilité et de faible encombrement, mais la loi de variation de la résistance en fonction de la température n'est pas linéaire

LES CAPTEURS ANALOGIQUES

LES CAPTEURS ANALOGIQUES 1. 4 - Couple thermoélectrique Exemple : le thermocouple Un thermocouple est constitué de deux conducteurs en métaux de caractéristiques thermoélectriques différents. Ces deux conducteurs placés dans un gradient de température, vont générer une FEM ( V ) en rapport avec la température

LES CAPTEURS ANALOGIQUES 1. 5 - Sonde de niveau capacitive La méthode de mesure capacitive est basée sur le principe du condensateur. La conversion d’une variation de capacité en une variation de courant s’effectue par un transmetteur.

LES TRANSMETTEURS C'est un dispositif répondant à une variable mesurée afin de générer et de transmettre un signal de sortie standard en relation continue avec la valeur de la variable mesurée. Le transmetteur est destiné à être monté en tête de sonde. Le signal du détecteur ( sonde de température, de niveau, etc… ) est converti par le transmetteur 2 fils en un signal courant linéarisé. La liaison 2 fils assure à la fois l'alimentation et la transmission du signal

LES TRANSMETTEURS Deux types de transmission du signal cohabitent : • La boucle de tension : 0 -10 V, 5 V- 10 V Le capteur délivre une tension proportionnelle à la grandeur mesurée. Attention cependant au problème des parasites radioélectriques • La boucle de courant : 0 -20 m. A, 4 -20 m. A Le capteur délivre un courant proportionnel à la grandeur mesurée. La faible impédance du circuit améliore l’immunité aux parasites de la boucle et lui confère une plus grande précision. La boucle de courant 4 - 20 m. A présente l’avantage de permettre la détection d’une coupure de la ligne si i = 0 m. A ( sécurité fil coupée ).
introductionautomatismeindustriel par [Www.cours-electromecanique].pptx