5c08777aea1d55cac01d14a710b0f2ec.ppt
- Количество слайдов: 35



Automated Bridge Scour Inspection FSU/FAMU College of Engineering Team 7 Concept Design Review 12/1/2010
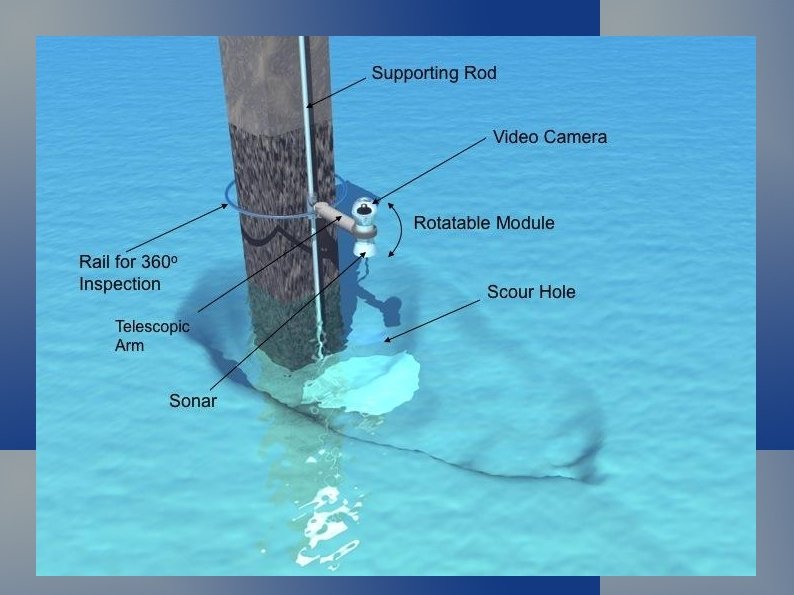

Revised System

Vertical Motion Design Updates / Improvements - Concepts considered - Selection criteria - Risks associated with selection Schedule / Budget Updates - Analysis time exceeded - Fabrication time overestimated - Proposed equipment within budgeted amount

Vertical Motion Analysis Method / Assumptions - Operating parameters for DC Motor - Critical Operation Point - Gearing for adequate ascent/descent speed Analysis Results - Minimum load torque: 6. 5 N*m - 5: 1 gear reduction ratio - Adequate speed: 20 cm/sec - Sufficient output torque: 32 N*m

Vertical Motion Revised Specification - System weight inflated 10%: 44 lbs. - Motor load under 80% Proposed Equipment - Maxon Motors RE 35 Brushed DC Motor - 24 V Operation - Maxon Motors 32 HP Planetary Gearhead - 28: 1 Reduction ratio - Combined Cost: $ 468. 00

Vertical Motor Performance

Circumferential Motion Design Updates / Improvements - Concepts considered - Selection criteria - Risks associated with selection Schedule / Budget Updates - Analysis time overestimated - Fabrication time overestimated - Proposed motor within budget amount - Guiderail cost pending

Circumferential Motion Analysis Method / Assumptions - Operation at low speed, low displacement - Low drag - Focus on precision positioning Analysis Results - 12 V DC Motor - Minimum 200 oz-in stall torque

Circumferential Motion Proposed Equipment - Pololu 12 V 131: 1 DC Gearmotor - Combined 64 CPR Encoder - Cost: $ 40. 00

SONAR Tilt Design Updates - Maintain previous design - Lower priority - Low risk Schedule / Budget Updates - Analysis and specification pending - Budget on par

Design Structure • Design Updates and Improvements • Circular Guide Rail • Component Housing • Localization • Risks

Design Updates and Improvements • Circular Guide Rail • Bishop-Wisecarver • Single Edged PRT • 24” Diameter • 11. 5 lbs • Custom Hinge
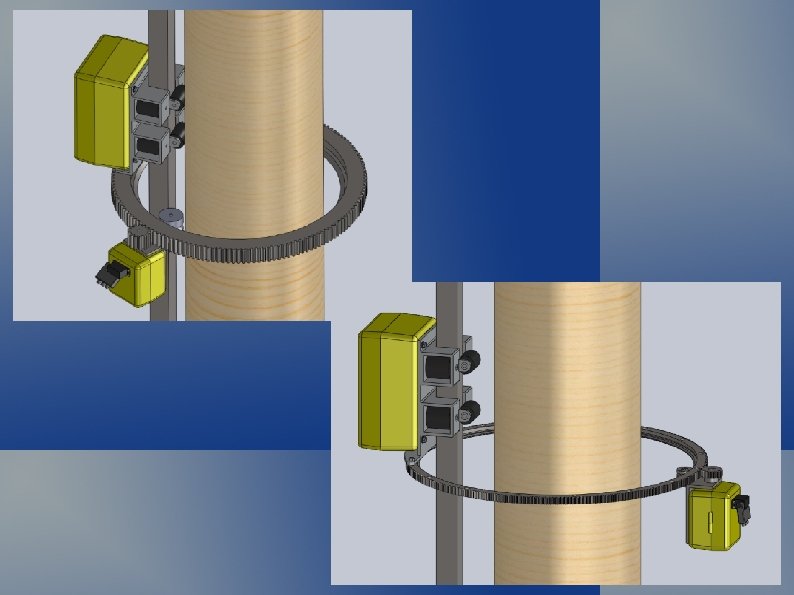

• Component Housings • Locker 2 by Witz • Size • Pressure • Localization • Motor + Encoder • Accuracy

Risks • Ring Design • Custom • Waterproof • Exit Holes • Encoder Accuracy

Power Old Design Use 2 separate battery sources - DC Motors, Motor Controller - AGM battery - Microcontroller, Sensors - Ni. MH Better efficiency, less power loss The New Design - Motor Driver outputs 5 V for Microcontroller, Sonar, servo. Eliminates 2 nd battery - Use 1 Li. Fe. PO 4 or SLA Battery to power everything

Block Design for Powering Components - Motor Driver has a feature that can power the DC motors and also some low power components.

Sabertooth dual 25 A motor driver Controls 2 Brushed DC Motors independently Continuous Output channel per 25 Amps 5 V Output Terminal for Microcontroller Power Peak Output per channel 50 Amps Lithium protection mode Nominal Voltage 6 -24 Volts Built-in Overcurrent Thermal Protection & Screw-in Terminals for Easy, Secure Connections input Max Voltage 30 Volts Size 2. 6''x 3. 2''x 0. 8''

DC motors Vertical motion motor - Nominal Voltage 24 V Circumferential motion motor - Starting Current 41 A - 12 V ~300 m. A - Cont. Current 3. 36 A

Battery - Weight and Cost are issues - Lead Acid vs Lithium Polymer 1. Sealed Lead Acid Battery - Cheaper, but heavier 2. Polymer Li. Fe. Po 4 Battery - More expensive, but lighter

Technical Risks - hook up battery to motor driver reverse polarity. This will damage and void the driver!! Add a diode to prevent this. Product is expensive ~$125 - Motor overheating, The motor driver peaks at 50 Amps and has overcurrent protection built-in. DC motors are within the motor driver's capabilities. . . 6 V-24 V continuous run < 25 Amps. Starting run < 50 Amps

The Next Step. . - Choose battery type and capacity Ah - Choose/Purchase DC Motors and Motor Controller - Purchase a Battery for testing purposes - More detailed design to integrate into system (wiring, positioning electronics in casing, protection, i. e. )

Microcontroller Beagle Board • $149 • ARM ® Cortex TM A 8 MHz @ 1 GHz • LPDDR RAM 512 MB • SD Card Expansion • 3 D graphics accelerator • 5 Volts • 16 I/O IC 2 ports • RS-232 Port • Large active community

Autonomous Programming • Language - C++ • Computer Environments - Eclipse - Netbeans • Beagle Board Packages - Bash task - Nativ-sdk - gdb - samba

Autonomous Programming • 3 Modules - Vertical Movement - Circumference Movement - Sonar Servo Movement • Outputs - Motor Controller - Servo • Inputs - Encoders - Sonar

Current Progress - Preliminary pseudo code finished - Detailed information on I/0 Communication - Write Detailed pseudo code - Begin programming using Eclipse and/or Netbeans

Technical Risk • Inefficient amount of I/O pins • IC 2 1. 8 V Tolerance • Microcontroller shortage

SONAR • Old Design: • Test multiple sensors • Use Fish Finder transducers • Lower costs • Compatibility issues w/ microcontroller • Time Constraints • New Plan: • Only test 1 or 2 sensors • SONAR altimeters • Higher costs • Connect directly to microcontroller via RS-232

Benthos PSA-916 Frequency: 200 k. Hz Beam Width: 14 degrees conical Range: 0. 8 m – 100 m Output: RS-232 (digital) 0 – 5 VDC (analog) Resolution: RS-232: 1 cm Analog: 2. 5 cm Power: 6 – 24 VDC; 100 m. A @ 6 V Dimensions: 2. 25” Diameter X 9. 38” Long Weight: 1. 4 lb (air); 0. 8 lb (water)

Kongsberg 1007 Series Frequency: 675 k. Hz Beam Width: 2. 5 degrees nominal Range: 0. 61 m – 30. 48 m Output: RS-232; 9600 baud rate Resolution: 2. 4 mm Power: 22 – 26 VDC; 250 m. A Dimensions: 3. 49” Diameter X 7. 75” Long Weight: 5. 2 lb (air); 2. 4 lb (water)

Tritech PA 500 Frequency: 500 k. Hz Beam Width: 6 degrees conical Range: 0. 3 m – 50 m Output: RS-232; 9600 baud rate Resolution: RS-232: 1 mm Analog: 0. 025% Power: 24 VDC @ 80 m. A; 12 VDC @ 160 m. A Dimensions: 1. 85” Diameter X 6. 30” Long Weight: 2. 43 lb (air); 1. 76 lb (water)

Risks • Physical Damage to sensor – O-ring – Abrasion from sediment • Operation Angle • Weak Signal Received • Obstacles

Budget

Schedule
5c08777aea1d55cac01d14a710b0f2ec.ppt