

5f30579189aa3e2ac88461cc235c4a74.ppt
- Количество слайдов: 26
 Automated Allocation of ESA Ground Station Network Services S. Damiani, H. Dreihahn, Jörg Noll, Marc Niézette (VEGA IT Gmb. H) G. P. Calzolari (ESA/ESOC) 24 th of October 2006 Space. Ops Conference 2006 5 th International Workshop on Planning and Scheduling for Space
Automated Allocation of ESA Ground Station Network Services S. Damiani, H. Dreihahn, Jörg Noll, Marc Niézette (VEGA IT Gmb. H) G. P. Calzolari (ESA/ESOC) 24 th of October 2006 Space. Ops Conference 2006 5 th International Workshop on Planning and Scheduling for Space
 Overview n Context and System Overview: ESTRACK Planning System n Modeling n Planning problem generation n Planning problem solving n Preliminary results n Future work
Overview n Context and System Overview: ESTRACK Planning System n Modeling n Planning problem generation n Planning problem solving n Preliminary results n Future work
 ESTRACK – ESA Tracking Network Overview Maspalomas, Canary Island, Spain Cebreros & Villafranca, Spain Kiruna, Sweden Redu, Belgium Kourou, French Guyana Malindi, Kenya New Norcia & Perth, Australia
ESTRACK – ESA Tracking Network Overview Maspalomas, Canary Island, Spain Cebreros & Villafranca, Spain Kiruna, Sweden Redu, Belgium Kourou, French Guyana Malindi, Kenya New Norcia & Perth, Australia
 ESTRACK Evolution n Yesterday n n n Today n n n Ground stations were almost exclusively dedicated to a given ESA mission Ground stations were operated locally ESTRACK is constantly growing in size, capability and complexity Ground stations are remotely operated on a routine basis Ground stations are supporting multiple missions, within and outside ESA Users requests are evolving from direct request of specific facilities to more generic tracking service requirements Tomorrow n n The level of cross-support will increase The load of the network will continue to grow Need for centralised automated allocation
ESTRACK Evolution n Yesterday n n n Today n n n Ground stations were almost exclusively dedicated to a given ESA mission Ground stations were operated locally ESTRACK is constantly growing in size, capability and complexity Ground stations are remotely operated on a routine basis Ground stations are supporting multiple missions, within and outside ESA Users requests are evolving from direct request of specific facilities to more generic tracking service requirements Tomorrow n n The level of cross-support will increase The load of the network will continue to grow Need for centralised automated allocation
 ESTRACK Management & Scheduling System EMS Users Interaction with Users Planning Process Interaction with External Providers Online ESTRACK Mgnt Ground Stations NMS Managed Facilities Non ESA Agency
ESTRACK Management & Scheduling System EMS Users Interaction with Users Planning Process Interaction with External Providers Online ESTRACK Mgnt Ground Stations NMS Managed Facilities Non ESA Agency
 Flight Dynamics Planner MMI Online MMI SMF EMS User EMS in more details Mission Planning Mission Operation EMS ESTRACK Management Plan ESTRACK Planning System Proxy Format Converter File Server External Provider (scheduling office) SICF MAS MCS NIS SICF ESTRACK Coordination System ESTRACK Scheduling System M&C ESTRACK Ground Station Schedules Communications Network Management
Flight Dynamics Planner MMI Online MMI SMF EMS User EMS in more details Mission Planning Mission Operation EMS ESTRACK Management Plan ESTRACK Planning System Proxy Format Converter File Server External Provider (scheduling office) SICF MAS MCS NIS SICF ESTRACK Coordination System ESTRACK Scheduling System M&C ESTRACK Ground Station Schedules Communications Network Management
 Dynamic use of the system n Three levels n n EMS system Planning session Planning run Plans are frozen one week before execution
Dynamic use of the system n Three levels n n EMS system Planning session Planning run Plans are frozen one week before execution
 ESTRACK Service Allocation Requirements n One pass from AOS to LOS of a minimum duration per orbit (e. g. ENVISAT) n Maximum continuous contact per orbit, with mandatory contact in a time period between two events specified for each orbit, and minimum hand-over duration (e. g. XMM, INTEGRAL) n Maximum/Minimum total contact duration and number of passes within a period, with minimum pass duration (e. g. SMART-1) n Maximum coverage for a constellation; in case of conflict between several S/C for the visibility of the same GS, the duration of the contact with the first S/C visible from the GS is maximized (e. g. CLUSTER)
ESTRACK Service Allocation Requirements n One pass from AOS to LOS of a minimum duration per orbit (e. g. ENVISAT) n Maximum continuous contact per orbit, with mandatory contact in a time period between two events specified for each orbit, and minimum hand-over duration (e. g. XMM, INTEGRAL) n Maximum/Minimum total contact duration and number of passes within a period, with minimum pass duration (e. g. SMART-1) n Maximum coverage for a constellation; in case of conflict between several S/C for the visibility of the same GS, the duration of the contact with the first S/C visible from the GS is maximized (e. g. CLUSTER)
 Modeling requirements Mission Agreement Mission: ENVISAT User Service Selector: every second orbit Standing Order One orbit Constraint Not less than 10 minutes Constraint Station Visible Service Telemetry Service Telecommand
Modeling requirements Mission Agreement Mission: ENVISAT User Service Selector: every second orbit Standing Order One orbit Constraint Not less than 10 minutes Constraint Station Visible Service Telemetry Service Telecommand
 Modeling resources Ground Station Name: Kourou Ground Station Name: KIRUNA Service Telemetry Service Ranging Service Telecommand Service Ranging n Services available during visibility windows
Modeling resources Ground Station Name: Kourou Ground Station Name: KIRUNA Service Telemetry Service Ranging Service Telecommand Service Ranging n Services available during visibility windows
 Modeling preferences n ESTRACK allocates priorities to the Mission Agreements for using Ground Stations n Mission Agreements have internal preferences for the choice of the Ground Stations Mission Station Santiago Maspalomas Kiruna ERS 2 7 6 5 XMM 3 4 N/A Cluster 2 1 8
Modeling preferences n ESTRACK allocates priorities to the Mission Agreements for using Ground Stations n Mission Agreements have internal preferences for the choice of the Ground Stations Mission Station Santiago Maspalomas Kiruna ERS 2 7 6 5 XMM 3 4 N/A Cluster 2 1 8
 Planning Objectives n Every User Service must be completely implemented n No global optimisation is required n No alternative solutions are proposed to the user n If no solution can be found the operator can enable degraded User Services
Planning Objectives n Every User Service must be completely implemented n No global optimisation is required n No alternative solutions are proposed to the user n If no solution can be found the operator can enable degraded User Services
 Planning problem generation Resources n Ground Station: exclusive single capacity reusable resource n Rules to create all opportunities for all User Services taking into account all Ground Stations n Other constraints can be specified (temporal filtering) n Language for Mission Planning n Service Opportunity Windows (SOWs) ( ) fact(spacecraft_visibility, ? tv. S, ? tv. E, ? station, SPACECRAFT X) ^ fact(operator_shift, ? to. S, ? to. E, SPACECRAFT X) ^ ? to. S < ? tv. S – 10 ^ ? t 0 E > ? tv. E + 10 -> sow(? station, , operational_service_group_name, ? tv. S, ? tv. E)
Planning problem generation Resources n Ground Station: exclusive single capacity reusable resource n Rules to create all opportunities for all User Services taking into account all Ground Stations n Other constraints can be specified (temporal filtering) n Language for Mission Planning n Service Opportunity Windows (SOWs) ( ) fact(spacecraft_visibility, ? tv. S, ? tv. E, ? station, SPACECRAFT X) ^ fact(operator_shift, ? to. S, ? to. E, SPACECRAFT X) ^ ? to. S < ? tv. S – 10 ^ ? t 0 E > ? tv. E + 10 -> sow(? station, , operational_service_group_name, ? tv. S, ? tv. E)
 Planning problem generation Goals n Extending goals: n n n For each Mission Agreement For each User Service Generate all periods during which the User Service shall be implemented n BSOP (Basic Standing Order Period) n E. g. every second orbit n n BSOP length: one orbit BSOP Selector: 2 User Service x Impl t Start of orbit events
Planning problem generation Goals n Extending goals: n n n For each Mission Agreement For each User Service Generate all periods during which the User Service shall be implemented n BSOP (Basic Standing Order Period) n E. g. every second orbit n n BSOP length: one orbit BSOP Selector: 2 User Service x Impl t Start of orbit events
 Planning problem generation Activities n Inside each BSOP to be planned, a pattern of activities must be implemented n Each activity represents the use one of one Ground Station by one Spacecraft during one time interval n Start and end times n n n are variables during the planning run are fixed in the ESTRACK Management Plan Candidate Operational Service Sessions (COSSes) Impl BSOP t 5 COSS_3 t 6 COSS_1 t 1 Ground Station A t 2 COSS_2 t 3 handover t 4 Ground Station B
Planning problem generation Activities n Inside each BSOP to be planned, a pattern of activities must be implemented n Each activity represents the use one of one Ground Station by one Spacecraft during one time interval n Start and end times n n n are variables during the planning run are fixed in the ESTRACK Management Plan Candidate Operational Service Sessions (COSSes) Impl BSOP t 5 COSS_3 t 6 COSS_1 t 1 Ground Station A t 2 COSS_2 t 3 handover t 4 Ground Station B
 Planning problem generation Domain n Constraints attached to User Services: Rules defining the characteristics of the planning problem n n Implicit constraints of the domain n E. g. minimum and maximum contact distance minimum and maximum contact duration Availability constraints (each COSS inside one unique SOW) Resource constraints (each GS used by one SC at a time) Priorities t 7 COSS_4 t 8 (2) (4) t 5 COSS_3 t 6 (4) t 1 COSS_1 t 2 Astart SOW A COSS_2 t 3 (3) t 4 Ground Station A Aend Ground Station B
Planning problem generation Domain n Constraints attached to User Services: Rules defining the characteristics of the planning problem n n Implicit constraints of the domain n E. g. minimum and maximum contact distance minimum and maximum contact duration Availability constraints (each COSS inside one unique SOW) Resource constraints (each GS used by one SC at a time) Priorities t 7 COSS_4 t 8 (2) (4) t 5 COSS_3 t 6 (4) t 1 COSS_1 t 2 Astart SOW A COSS_2 t 3 (3) t 4 Ground Station A Aend Ground Station B
 Planning Algorithms Overview n Parameters of a planning run n Set of Mission Agreements Planning horizon Principle: incrementally fill a valid plan with activities until all extended goals are satisfied
Planning Algorithms Overview n Parameters of a planning run n Set of Mission Agreements Planning horizon Principle: incrementally fill a valid plan with activities until all extended goals are satisfied
 Planning Algorithms BSOP selection n Try to minimise repairs n Earliest deadline first ordering n Plan is incrementally filled from the start to the end of the planning session Planning horizon t User Service 1 Impl User Service 2 Impl
Planning Algorithms BSOP selection n Try to minimise repairs n Earliest deadline first ordering n Plan is incrementally filled from the start to the end of the planning session Planning horizon t User Service 1 Impl User Service 2 Impl
 Planning Algorithms COSSes generation Impl BSOP n n Given one BSOP to implement and the set of available SOWs Select the SOWs to use and determine the handovers n n n Optimisation algorithm: maximise the overall contact time weighed by the preferences of the GS Parameterised to obtain desired patterns Generate the COSSes and the temporal constraints available SOWs A(3) C(5) GS 1 D(3) E(2) GS 2 GS 3 GS 4 B(6) D(3) A(3) handover B(6) GS 2 handover GS 4 COSSes C 1 D A B C 2 C 3 GS 2 GS 4
Planning Algorithms COSSes generation Impl BSOP n n Given one BSOP to implement and the set of available SOWs Select the SOWs to use and determine the handovers n n n Optimisation algorithm: maximise the overall contact time weighed by the preferences of the GS Parameterised to obtain desired patterns Generate the COSSes and the temporal constraints available SOWs A(3) C(5) GS 1 D(3) E(2) GS 2 GS 3 GS 4 B(6) D(3) A(3) handover B(6) GS 2 handover GS 4 COSSes C 1 D A B C 2 C 3 GS 2 GS 4
 Planning Algorithms Consistency check n Check the consistency of the temporal constraint network n Constraints n n n Simple binary constraints Linear constraints Disjunctions of binary constraints (partial orderings to avoid unary resource contentions) n Generally speaking: Disjunctive Linear Problem [Li and Williams 2005] Mixed Integer Programming n But relatively few linear constraints, not in disjunctions n Solve of a Disjunctive Temporal Problem (DTP) [Stergiou and Boubarakis 1998] n Check the linear constraints at each solution of the DTP
Planning Algorithms Consistency check n Check the consistency of the temporal constraint network n Constraints n n n Simple binary constraints Linear constraints Disjunctions of binary constraints (partial orderings to avoid unary resource contentions) n Generally speaking: Disjunctive Linear Problem [Li and Williams 2005] Mixed Integer Programming n But relatively few linear constraints, not in disjunctions n Solve of a Disjunctive Temporal Problem (DTP) [Stergiou and Boubarakis 1998] n Check the linear constraints at each solution of the DTP
![Planning Algorithms DTP solving n Based on Epilitis [Tsamardinos and Pollack 2003] n n](https://present5.com/presentation/5f30579189aa3e2ac88461cc235c4a74/image-21.jpg "Planning Algorithms DTP solving n Based on Epilitis [Tsamardinos and Pollack 2003] n n") Planning Algorithms DTP solving n Based on Epilitis [Tsamardinos and Pollack 2003] n n n Meta Variable: disjunction of binary constraints Meta Domain: set of disjuncts Meta Constraint: implicit (partial assignment valid iff underlying STP is consistent) Conflict directed backtracking tree search with forward checking Recursive algorithm which records conflict information (no-good: pair invalid partial assignment / involved variables) Dynamic meta-CSP n n n Adding activities: tightening Removing activities: relaxation No-goods reuse Oracles
Planning Algorithms DTP solving n Based on Epilitis [Tsamardinos and Pollack 2003] n n n Meta Variable: disjunction of binary constraints Meta Domain: set of disjuncts Meta Constraint: implicit (partial assignment valid iff underlying STP is consistent) Conflict directed backtracking tree search with forward checking Recursive algorithm which records conflict information (no-good: pair invalid partial assignment / involved variables) Dynamic meta-CSP n n n Adding activities: tightening Removing activities: relaxation No-goods reuse Oracles
 Planning Algorithms Repair n Conflict detection and selection: use the no-goods returned by Epilitis (associated to the empty assignment of the DTP) n Activity selection: heuristics, e. g. delete the one with the lowest priority n Modification of the associated BSOP (generate new pattern of activities) n New consistency check n If no solution found after a given number of repairs, report to the operator with incriminated BSOPs
Planning Algorithms Repair n Conflict detection and selection: use the no-goods returned by Epilitis (associated to the empty assignment of the DTP) n Activity selection: heuristics, e. g. delete the one with the lowest priority n Modification of the associated BSOP (generate new pattern of activities) n New consistency check n If no solution found after a given number of repairs, report to the operator with incriminated BSOPs
 Implementation results Computation time Total duration 94 seconds Input 5 satellites => 5 User Services BSOP to implement: each orbit (two days) Planning horizon: 5 days Computation time (seconds) 5. 4 6. 4 (d) 219 activities 1533 binary constraints 25 disjunctive constraints (b) (c) (a) (a) 2 repairs Rank of the consistency check
Implementation results Computation time Total duration 94 seconds Input 5 satellites => 5 User Services BSOP to implement: each orbit (two days) Planning horizon: 5 days Computation time (seconds) 5. 4 6. 4 (d) 219 activities 1533 binary constraints 25 disjunctive constraints (b) (c) (a) (a) 2 repairs Rank of the consistency check
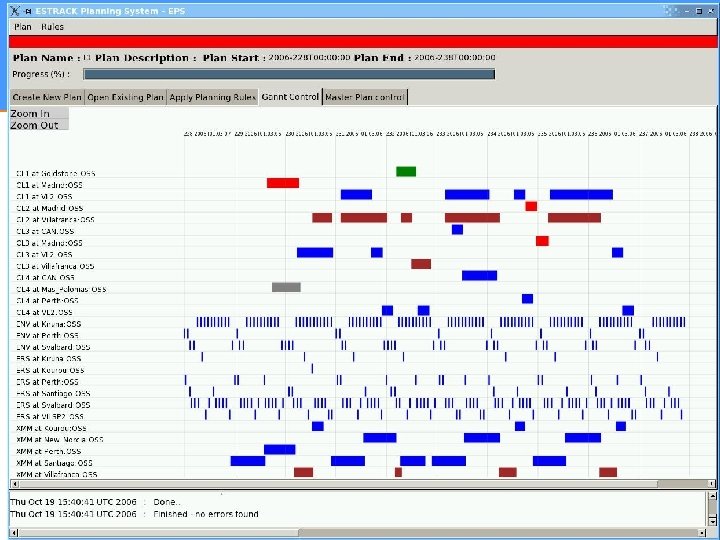
 Implementation results Visualisation n Input n n Complexity n n 7 satellites (2 LEOs / 5 HEOs) => 7 User Services BSOP to implement: each orbit (100 minutes / 2 days) Planning horizon: 10 days 325 activities 18 disjunctive constraints 2830 Simple Temporal Constraints Results n n Planning duration: 804 seconds Number of repairs: 23
Implementation results Visualisation n Input n n Complexity n n 7 satellites (2 LEOs / 5 HEOs) => 7 User Services BSOP to implement: each orbit (100 minutes / 2 days) Planning horizon: 10 days 325 activities 18 disjunctive constraints 2830 Simple Temporal Constraints Results n n Planning duration: 804 seconds Number of repairs: 23
 Future work n Integration and test n n n Technical improvements n n n Linear programming Conflict information returned to the operator Guide the generation of the patterns of activities for one BSOP Heuristics for conflict detection and selection Repair algorithm Dynamic meta-CSP resolution techniques (relaxation) Adaptation of the plan following changes in events (flexibility) Implement further requirements n n Granularity of the resources: from the ground stations to the services => discrete resources Improve interaction of the operator with the plan view
Future work n Integration and test n n n Technical improvements n n n Linear programming Conflict information returned to the operator Guide the generation of the patterns of activities for one BSOP Heuristics for conflict detection and selection Repair algorithm Dynamic meta-CSP resolution techniques (relaxation) Adaptation of the plan following changes in events (flexibility) Implement further requirements n n Granularity of the resources: from the ground stations to the services => discrete resources Improve interaction of the operator with the plan view