

Асинхронный электропривод.ppt
- Количество слайдов: 63
 Асинхронный электропривод
Асинхронный электропривод
 Основные допущения o o o кривые намагничивания активной стали статора и ротора считаются линейными потерями в стали пренебрегаем предполагаем, что машина обладает круговой симметрией ротор –цилиндрический намагничивающая сила и потокосцепление распределены по его окружности пространственными гармониками поля пренебрегаем
Основные допущения o o o кривые намагничивания активной стали статора и ротора считаются линейными потерями в стали пренебрегаем предполагаем, что машина обладает круговой симметрией ротор –цилиндрический намагничивающая сила и потокосцепление распределены по его окружности пространственными гармониками поля пренебрегаем
 Схема расположения обмоток статора ротора асинхронной машины и Ротор вращается с переменной круговой частотой ω против часовой стрелки. В том же положительном направлении измеряется угол γ между осью а статора и осью х ротора.
Схема расположения обмоток статора ротора асинхронной машины и Ротор вращается с переменной круговой частотой ω против часовой стрелки. В том же положительном направлении измеряется угол γ между осью а статора и осью х ротора.
 u, Ψ,") Уравнения электромагнитных контуров в фазных координатах u = рΨ + Ri (1) u, Ψ, i векторы напряжений, потокосцеплений и токов контуров; R диагональная матрица активных сопротивлений контуров; р = d/dt Ψ=Li (2) L прямоугольная симметрическая матрица собственных и взаимных индуктивноетей контуров
Уравнения электромагнитных контуров в фазных координатах u = рΨ + Ri (1) u, Ψ, i векторы напряжений, потокосцеплений и токов контуров; R диагональная матрица активных сопротивлений контуров; р = d/dt Ψ=Li (2) L прямоугольная симметрическая матрица собственных и взаимных индуктивноетей контуров
 Уравнения электромагнитных контуров в фазных координатах o o o Ua, Ub, Uc, Ψa, Ψb, Ψc, ia, ib, ic напряжения, потокосцепления и токи фазных обмоток статора соответственно; Ux, Uy, Uz, Ψx, Ψy, Ψz, ix, iy, iz то же ротора; Rs и Rr сопротивления фазных обмоток статора и ротора;
Уравнения электромагнитных контуров в фазных координатах o o o Ua, Ub, Uc, Ψa, Ψb, Ψc, ia, ib, ic напряжения, потокосцепления и токи фазных обмоток статора соответственно; Ux, Uy, Uz, Ψx, Ψy, Ψz, ix, iy, iz то же ротора; Rs и Rr сопротивления фазных обмоток статора и ротора;
 Выражение для потокосцеплений Собственные и взаимные индуктивности фазных обмоток статора постоянны и обладают свойством круговой симметрии!
Выражение для потокосцеплений Собственные и взаимные индуктивности фазных обмоток статора постоянны и обладают свойством круговой симметрии!
 Индуктивности асинхронной машины Взаимные индуктивности фазных обмоток статора и ротора симметричны относительно главной диагонали матрицы в (4) и являются функциями угла поворота ротора γ
Индуктивности асинхронной машины Взаимные индуктивности фазных обмоток статора и ротора симметричны относительно главной диагонали матрицы в (4) и являются функциями угла поворота ротора γ
 Индуктивности асинхронной машины ρ=2π/3
Индуктивности асинхронной машины ρ=2π/3
 Компактная запись уравнений
Компактная запись уравнений
 Преобразование к системе модальных координат o o o начало отсчета углов направление фазы а статора Оси d, q статора и синфазные с ними оси g, h ротора вращаются против часовой стрелки с круговой частотой ωk=pξ ωk и угол поворота ξ осей d и q координатной системы в общем случае не совпадают с круговой час тотой ω и углом поворота вала ротора γ
Преобразование к системе модальных координат o o o начало отсчета углов направление фазы а статора Оси d, q статора и синфазные с ними оси g, h ротора вращаются против часовой стрелки с круговой частотой ωk=pξ ωk и угол поворота ξ осей d и q координатной системы в общем случае не совпадают с круговой час тотой ω и углом поворота вала ротора γ
 Формулы преобразования Для сбалансированной трёхфазной системы Прямое преобразование Обратное преобразование
Формулы преобразования Для сбалансированной трёхфазной системы Прямое преобразование Обратное преобразование
 Формулы преобразования Прямое преобразование Обратное преобразование
Формулы преобразования Прямое преобразование Обратное преобразование
 Выбор системы координат o o o ωk= 0 – система неподвижных координат типа α, β ωk = ω система координат, вращающихся вместе с ротором, обычно используемая в математическом описании синхронных машин ωk= ω1 система независимых вращающихся координат сети, удобная для анализа процессов в цепях с несколькими машинами переменного тока
Выбор системы координат o o o ωk= 0 – система неподвижных координат типа α, β ωk = ω система координат, вращающихся вместе с ротором, обычно используемая в математическом описании синхронных машин ωk= ω1 система независимых вращающихся координат сети, удобная для анализа процессов в цепях с несколькими машинами переменного тока
 Система координат α, β
Система координат α, β
 Система координат α, β
Система координат α, β
 и (14), обозначим матрицы прямого преобразования координат для") Преобразования координат Возвращаясь к уравнениям (12) и (14), обозначим матрицы прямого преобразования координат для статора и ротора соответственно
Преобразования координат Возвращаясь к уравнениям (12) и (14), обозначим матрицы прямого преобразования координат для статора и ротора соответственно
 Свойства матриц преобразования Аналогичные уравнения могут быть записаны для токов и потокосцеплений машины
Свойства матриц преобразования Аналогичные уравнения могут быть записаны для токов и потокосцеплений машины
 (26)") Уравнения электромагнитных контуров в модальных координатах (25) (26)
Уравнения электромагнитных контуров в модальных координатах (25) (26)
 Уравнения электромагнитных контуров в модальных координатах
Уравнения электромагнитных контуров в модальных координатах
 Уравнения электромагнитных контуров в модальных координатах Обозначим Ls полная индуктивность обмоток статора; Lr полная индуктивность обмоток ротора; Lm полная взаимная индуктивность обмоток статора и ротора
Уравнения электромагнитных контуров в модальных координатах Обозначим Ls полная индуктивность обмоток статора; Lr полная индуктивность обмоток ротора; Lm полная взаимная индуктивность обмоток статора и ротора
") Уравнения электромагнитных контуров в модальных координатах Таким образом В полной матричной записи уравнение (26) имеет вид
Уравнения электромагнитных контуров в модальных координатах Таким образом В полной матричной записи уравнение (26) имеет вид
 Уравнения электрического равновесия обмоток в модальных координатах Матрица сопротивлений RM
Уравнения электрического равновесия обмоток в модальных координатах Матрица сопротивлений RM
 Уравнения электрического равновесия обмоток в модальных координатах Элементы матрицы произведения при векторе ΨM должны иметь размерность круговой частоты: Их значения могут быть определены
Уравнения электрического равновесия обмоток в модальных координатах Элементы матрицы произведения при векторе ΨM должны иметь размерность круговой частоты: Их значения могут быть определены
 имеет вид В") Обобщенное уравнение в модальных координатах В полной матричной записи уравнение (35) имеет вид В скалярном виде в форме Коши
Обобщенное уравнение в модальных координатах В полной матричной записи уравнение (35) имеет вид В скалярном виде в форме Коши
 Схема замещения
Схема замещения
 из уравнений (32) можно получить") Уравнения для токов машины Для использования в (40) из уравнений (32) можно получить
Уравнения для токов машины Для использования в (40) из уравнений (32) можно получить
 Переходные индуктивности L’s соответствует результирующему значению индуктивности неподвижной асинхронной машины без активных сопротивлений со стороны статора при закороченном роторе L’r то же, со стороны ротора при закороченном статоре
Переходные индуктивности L’s соответствует результирующему значению индуктивности неподвижной асинхронной машины без активных сопротивлений со стороны статора при закороченном роторе L’r то же, со стороны ротора при закороченном статоре
 и ротора (б)") Переходные индуктивности статора (а) и ротора (б)
Переходные индуктивности статора (а) и ротора (б)
 коэффициент связи ротора; (47) результирующий") Параметры асинхронной машины Обозначим также: коэффициент связи статора; (46) коэффициент связи ротора; (47) результирующий коэффициент связи; (48) коэффициент рассеяния статора; (49) коэффициент рассеяния ротора; (50)
Параметры асинхронной машины Обозначим также: коэффициент связи статора; (46) коэффициент связи ротора; (47) результирующий коэффициент связи; (48) коэффициент рассеяния статора; (49) коэффициент рассеяния ротора; (50)
 (52) постоянная времени статора ; (53) постоянная") Параметры асинхронной машины результирующий коэффициент рассеяния; (51) (52) постоянная времени статора ; (53) постоянная времени ротора ; (54)
Параметры асинхронной машины результирующий коэффициент рассеяния; (51) (52) постоянная времени статора ; (53) постоянная времени ротора ; (54)
 выражения (43) принимают вид (55), которые дополняют") Уравнения токов машины С учетом (46 54) выражения (43) принимают вид (55), которые дополняют систему уравнений (40)
Уравнения токов машины С учетом (46 54) выражения (43) принимают вид (55), которые дополняют систему уравнений (40)
 Другие формы уравнений
Другие формы уравнений
 Другие формы уравнений
Другие формы уравнений
 Уравнения движения ротора, электромагнитного момента и мощности приведенный момент инерции ротора маховый момент ротора число пар полюсов электрический момент машины приведенный к ω механический момент привода
Уравнения движения ротора, электромагнитного момента и мощности приведенный момент инерции ротора маховый момент ротора число пар полюсов электрический момент машины приведенный к ω механический момент привода
 Уравнения движения ротора, электромагнитного момента и мощности В унитарной системе
Уравнения движения ротора, электромагнитного момента и мощности В унитарной системе
 Другие выражения для момента
Другие выражения для момента
 Уравнения асинхронной машины с короткозамкнутым ротором Для данного типа машин в уравнениях контуров ротора (39), (40), (56), (57) и (59) следует принять напряжения ug =0; uh = 0 (69) Продуктивным оказывается использование системы вращающихся координат, в которой оси d u q всегда ориентированы по направлению результирующего вектора потокосцепления ротора Ψr. Под углом ζ далее следует понимать его фазу.
Уравнения асинхронной машины с короткозамкнутым ротором Для данного типа машин в уравнениях контуров ротора (39), (40), (56), (57) и (59) следует принять напряжения ug =0; uh = 0 (69) Продуктивным оказывается использование системы вращающихся координат, в которой оси d u q всегда ориентированы по направлению результирующего вектора потокосцепления ротора Ψr. Под углом ζ далее следует понимать его фазу.
") Уравнения асинхронной машины с короткозамкнутым ротором Ψg = Ψr; Ψh≡ 0; pΨh≡ 0; (70) Mel = kr Ψr iq; (71) (72) (73) (74)
Уравнения асинхронной машины с короткозамкнутым ротором Ψg = Ψr; Ψh≡ 0; pΨh≡ 0; (70) Mel = kr Ψr iq; (71) (72) (73) (74)
 Уравнения асинхронной машины с короткозамкнутым ротором
Уравнения асинхронной машины с короткозамкнутым ротором
 Запись уравнений в синхронном времени
Запись уравнений в синхронном времени
 Запись уравнений в синхронном времени
Запись уравнений в синхронном времени
 Запись уравнений в синхронном времени
Запись уравнений в синхронном времени
 Запись уравнений в синхронном времени
Запись уравнений в синхронном времени
 Запись уравнений в синхронном времени
Запись уравнений в синхронном времени
 Дискретизация уравнений
Дискретизация уравнений
 Дискретизация уравнений
Дискретизация уравнений
 Схема замещения Vn – вектор состояния; Un –вектор управления in вектор оценки; qn, rn – аддитивные помехи
Схема замещения Vn – вектор состояния; Un –вектор управления in вектор оценки; qn, rn – аддитивные помехи
 Модель с применением механизма фильтра Калмана
Модель с применением механизма фильтра Калмана
 Уравнения дискретного фильтра Калмана
Уравнения дискретного фильтра Калмана
 Уравнения дискретного фильтра Калмана
Уравнения дискретного фильтра Калмана
 Элементы градиентных матриц
Элементы градиентных матриц
 Элементы градиентных матриц
Элементы градиентных матриц
 Элементы градиентных матриц
Элементы градиентных матриц
 Элементы градиентных матриц
Элементы градиентных матриц
 Первичная схема асинхронного привода
Первичная схема асинхронного привода
 Автономный инвертор напряжения
Автономный инвертор напряжения
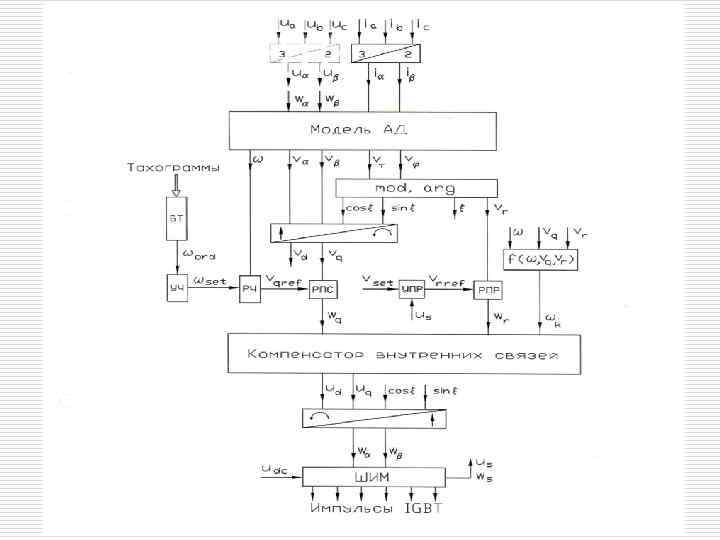
 Блок тахограмм
Блок тахограмм
 Блок уставки частоты
Блок уставки частоты
 Регулятор частоты
Регулятор частоты
 Блок уставки поля ротора
Блок уставки поля ротора
 Регуляторы поля статора и ротора
Регуляторы поля статора и ротора
 Компенсатор внутренних связей
Компенсатор внутренних связей