

Презентация_По_Автоматике_Якусик_Н_Н.pptx
- Количество слайдов: 15
 Анализ системы автомотического регулирования в теплице в летний период
Анализ системы автомотического регулирования в теплице в летний период
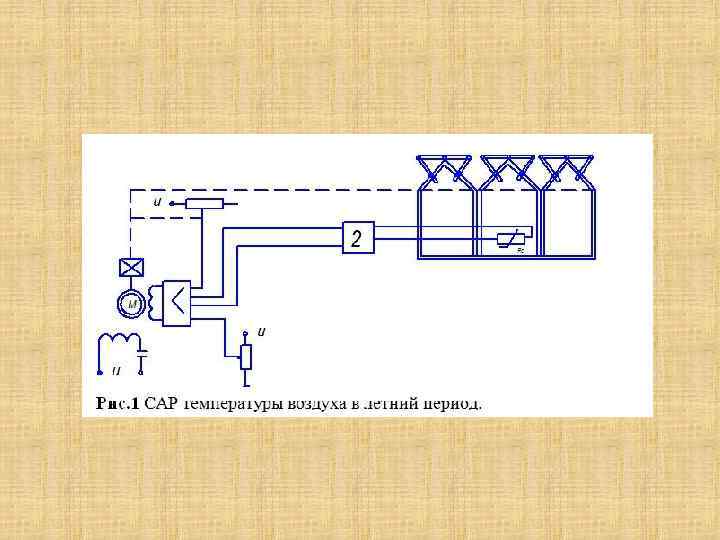
 Объектом управления рассматриваемой САР является теплица с фрамугами. Регулируемой величиной является температура воздуха Управляющее воздействие на объект – угол открытия фрамуг Датчиком (Д) является термометр сопротивления Задатчиком (З) является делитель напряжения. Задающий сигнал – величина напряжения, которая в определенном масштабе соответствует заданному значению температуры Сравнивающее устройство (СУ) выполнено на дифференциальном усилителе. Входной сигнал – Uз, Uн, Uо. с. Выходной сигнал – разность напряжений, подаваемая на усилитель (ДУ) Дифференциальный усилитель (ДУ) На вход усилителя подается напряжение задатчика Uз, датчика Uд, устройства местной обратной связи Uо. с. Выходной сигнал усилителя -- напряжение Uу, подаваемое на двигатель. • Исполнительное устройство представляет собой исполнительный механизм, который состоит из электродвигателя (Дв), редуктора (Р) и фрамуги (Ро). Входным сигналом для электродвигателя является напряжение Uу, выходным – угол поворота вала. Входной сигнал для редуктора – угол поворота вала, выходной сигнал -- угол поворота вала редуктора. Входной сигнал для фрамуг – угол поворота вала редуктора, выходной сигнал – угол открытия фрамуг. • Устройство местной обратной связи (УОС) выполнено в виде датчика переменного сопротивления, подвижный контакт которого механически связан с валом редуктора. Входным сигналом для него является угол поворота вала редуктора, а выходным – напряжение местной обратной связи. • Регулирующим органом (РО) являются фрамуги. Входной сигнал – угол поворота вала редуктора, выходной – угол поворота фрамуг.
Объектом управления рассматриваемой САР является теплица с фрамугами. Регулируемой величиной является температура воздуха Управляющее воздействие на объект – угол открытия фрамуг Датчиком (Д) является термометр сопротивления Задатчиком (З) является делитель напряжения. Задающий сигнал – величина напряжения, которая в определенном масштабе соответствует заданному значению температуры Сравнивающее устройство (СУ) выполнено на дифференциальном усилителе. Входной сигнал – Uз, Uн, Uо. с. Выходной сигнал – разность напряжений, подаваемая на усилитель (ДУ) Дифференциальный усилитель (ДУ) На вход усилителя подается напряжение задатчика Uз, датчика Uд, устройства местной обратной связи Uо. с. Выходной сигнал усилителя -- напряжение Uу, подаваемое на двигатель. • Исполнительное устройство представляет собой исполнительный механизм, который состоит из электродвигателя (Дв), редуктора (Р) и фрамуги (Ро). Входным сигналом для электродвигателя является напряжение Uу, выходным – угол поворота вала. Входной сигнал для редуктора – угол поворота вала, выходной сигнал -- угол поворота вала редуктора. Входной сигнал для фрамуг – угол поворота вала редуктора, выходной сигнал – угол открытия фрамуг. • Устройство местной обратной связи (УОС) выполнено в виде датчика переменного сопротивления, подвижный контакт которого механически связан с валом редуктора. Входным сигналом для него является угол поворота вала редуктора, а выходным – напряжение местной обратной связи. • Регулирующим органом (РО) являются фрамуги. Входной сигнал – угол поворота вала редуктора, выходной – угол поворота фрамуг.
 Система работает следующим образом: • • В установившемся режиме при равенстве температуры Ө в теплице Өз выходное напряжение ∆U=0 (∆U=Uз-Uд-Uо. с. ). Напряжение на электродвигателе не подается и в следствие этого угол открытия фрамуг остается неизменным. При отклонении температуры в теплице от заданной, например, в следствие изменения интенсивности солнечной радиации изменяется напряжение Uд датчика. Напряжение Uд является сигналом датчика системы, которое подается на сравнивающее устройство (СУ), где вычитается от Uз напряжения задатчика. Одновременно вал редуктора перемещает подвижный контакт потенциальной местной обратной связи. Выходное напряжение обратной связи Uо. с. , которое подается на устройство сравнения, где вычитается из сигнала ошибки. Усилитель усиливает полученную разность напряжений. За счет местной обратной связи обеспечивается пропорциональная зависимость между сигналом ошибки и углом поворота вала редуктора. Поэтому изменение поворота угла открытия фрамуг пропорционально величине отклонения температуры Ө на выходе от заданного Өз значения температуры. В результате температура в теплицах возвращается к заданному значению. В системе реализован принцип управления по отклонению. Система является стабилизирующей.
Система работает следующим образом: • • В установившемся режиме при равенстве температуры Ө в теплице Өз выходное напряжение ∆U=0 (∆U=Uз-Uд-Uо. с. ). Напряжение на электродвигателе не подается и в следствие этого угол открытия фрамуг остается неизменным. При отклонении температуры в теплице от заданной, например, в следствие изменения интенсивности солнечной радиации изменяется напряжение Uд датчика. Напряжение Uд является сигналом датчика системы, которое подается на сравнивающее устройство (СУ), где вычитается от Uз напряжения задатчика. Одновременно вал редуктора перемещает подвижный контакт потенциальной местной обратной связи. Выходное напряжение обратной связи Uо. с. , которое подается на устройство сравнения, где вычитается из сигнала ошибки. Усилитель усиливает полученную разность напряжений. За счет местной обратной связи обеспечивается пропорциональная зависимость между сигналом ошибки и углом поворота вала редуктора. Поэтому изменение поворота угла открытия фрамуг пропорционально величине отклонения температуры Ө на выходе от заданного Өз значения температуры. В результате температура в теплицах возвращается к заданному значению. В системе реализован принцип управления по отклонению. Система является стабилизирующей.
 Рис. 2 Функциональная схема САР температуры в теплице в летний период.
Рис. 2 Функциональная схема САР температуры в теплице в летний период.
 Ход работы • Составляем структурную схему САР.
Ход работы • Составляем структурную схему САР.
 • Определение закона регулирования системы. -Законом регулирования называют математическую зависимость, в соответствии с которой управляющее воздействие на объект формировалось бы безинерционным регулятором в функции от ошибки системы. • Т. к зависимость управляющего воздействия от ошибки пропорциональна говорит о том что в рассматриваемой системе применен П-закон регулирования.
• Определение закона регулирования системы. -Законом регулирования называют математическую зависимость, в соответствии с которой управляющее воздействие на объект формировалось бы безинерционным регулятором в функции от ошибки системы. • Т. к зависимость управляющего воздействия от ошибки пропорциональна говорит о том что в рассматриваемой системе применен П-закон регулирования.
 • Определение передаточных функций системы по управляющему и возмущающему воздействию и для ошибок по этим воздействиям – • Передаточная функция САР по возмущающему воздействию определяет взаимосвязь между изменением регулируемой величиной Y и изменением возмущающего воздействия F: • Передаточная функция для ошибки по управляющему воздействию определяет взаимосвязь между изменением сигнала ошибки и изменением задающего воздействия: • Передаточная функция по возмущающему воздействию определяет взаимосвязь между изменением ошибки и изменением возмущающего воздействия F: • Определение запасов устойчивости системы. Анализ устойчивости системы. • Устойчивость – это свойство системы возвращаться в исходный или близкий к нему установившийся режим после снятия воздействия, вызвавшего выход из установившегося режима. • Неустойчивая система является не работоспособной, поэтому проверка устойчивости является обязательным этапом анализа системы.
• Определение передаточных функций системы по управляющему и возмущающему воздействию и для ошибок по этим воздействиям – • Передаточная функция САР по возмущающему воздействию определяет взаимосвязь между изменением регулируемой величиной Y и изменением возмущающего воздействия F: • Передаточная функция для ошибки по управляющему воздействию определяет взаимосвязь между изменением сигнала ошибки и изменением задающего воздействия: • Передаточная функция по возмущающему воздействию определяет взаимосвязь между изменением ошибки и изменением возмущающего воздействия F: • Определение запасов устойчивости системы. Анализ устойчивости системы. • Устойчивость – это свойство системы возвращаться в исходный или близкий к нему установившийся режим после снятия воздействия, вызвавшего выход из установившегося режима. • Неустойчивая система является не работоспособной, поэтому проверка устойчивости является обязательным этапом анализа системы.
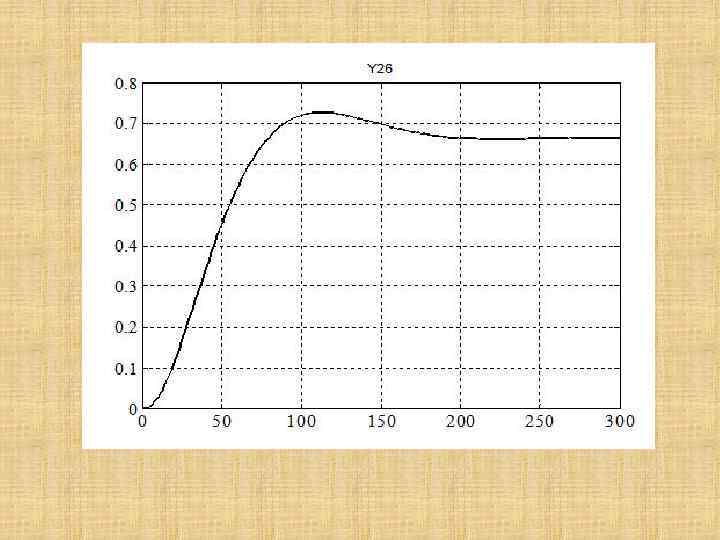
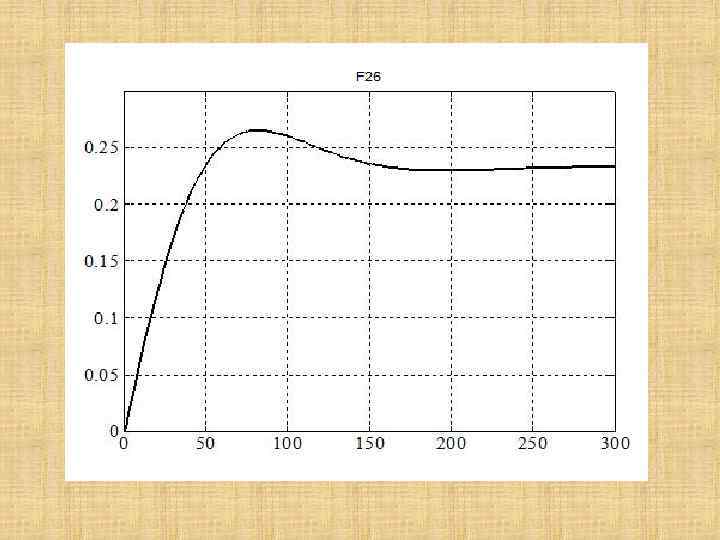
 • • • Оценка качества управления по переходным функциям-Качество переходных процессов в линейных системах обычно оценивают по переходным функциям. Переходной функцией h(t) называется график изменения во времени управляемой (регулируемой) величины системы при подаче на систему единичного управляющего или возмущающего воздействий. Показатели качества управления, определяемые непосредственно по переходным функциям, называют прямыми показателями качества управления. Быстродействие системы оценивается временем регулирования. Время регулирования определяется как интервал времени от начала переходной функции до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ∆: Колебательность переходного процесса определяется числом N перерегулирований для переходной функции по управляющему воздействию или числом колебаний N для переходной функции по возмущающему воздействию за время переходного процесса. В нашем случае N=1.
• • • Оценка качества управления по переходным функциям-Качество переходных процессов в линейных системах обычно оценивают по переходным функциям. Переходной функцией h(t) называется график изменения во времени управляемой (регулируемой) величины системы при подаче на систему единичного управляющего или возмущающего воздействий. Показатели качества управления, определяемые непосредственно по переходным функциям, называют прямыми показателями качества управления. Быстродействие системы оценивается временем регулирования. Время регулирования определяется как интервал времени от начала переходной функции до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ∆: Колебательность переходного процесса определяется числом N перерегулирований для переходной функции по управляющему воздействию или числом колебаний N для переходной функции по возмущающему воздействию за время переходного процесса. В нашем случае N=1.
 Общие выводы по работе • • • Объектом управления САР температуры в теплице является теплица с фрамугами. Управляющим воздействием на объект является угол поворота фрамуг, основное возмущающее воздействие – изменение интенсивности солнечной радиации. Закон регулирования системы пропорциональный. Система устойчива. Запас устойчивости по амплитуде 1, по фазе 75º. Система является статической. Статическая ошибка по управляющему воздействию , статическая ошибка по возмущающему воздействию. Прямые оценки показателей качества управления следующие: перерегулирование , число пререгулирований N=1, что удовлетворяет требованиям и свидетельствует о достаточном запасе устойчивости. Время регулирования 164 с, максимальное отклонение регулируемой величины от её установившегося режима приходящееся на единицу ступенчатого возмущения равно , колебательность системы равна 0, 2. Качество системы следует считать удовлетворительным.
Общие выводы по работе • • • Объектом управления САР температуры в теплице является теплица с фрамугами. Управляющим воздействием на объект является угол поворота фрамуг, основное возмущающее воздействие – изменение интенсивности солнечной радиации. Закон регулирования системы пропорциональный. Система устойчива. Запас устойчивости по амплитуде 1, по фазе 75º. Система является статической. Статическая ошибка по управляющему воздействию , статическая ошибка по возмущающему воздействию. Прямые оценки показателей качества управления следующие: перерегулирование , число пререгулирований N=1, что удовлетворяет требованиям и свидетельствует о достаточном запасе устойчивости. Время регулирования 164 с, максимальное отклонение регулируемой величины от её установившегося режима приходящееся на единицу ступенчатого возмущения равно , колебательность системы равна 0, 2. Качество системы следует считать удовлетворительным.
 ОБЩИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ К КУРСОВОЙ РАБОТЕ • • • Управление каким-либо объектом – это процесс воздействия на него с целью обеспечения требуемого течения процессов в объекте или требуемого изменения его состояния. Управление, осуществляемое без участия человека, называется автоматическим управлением. Под объектом управления (ОУ), в общем случае, понимают совокупность взаимосвязанных технических средств и биологических объектов, которыми необходимо управлять для достижения цели. Техническое устройство, с помощью которого осуществляется автоматическое управление объектом, называется управляющим устройством (УУ). Совокупность объекта управления и управляющего устройства образует систему автоматического управления (САУ). Параметр ОУ, которым управляют, называется управляемой величиной. Воздействие, которое прикладывается к ОУ со стороны УУ для изменения управляемой величины, называется управляющим воздействием на объект. На состояние ОУ и УУ влияют воздействия, которые вызывают изменение управляемой величины, мешая процессу управления. Такие воздействия называют возмущающими воздействиями. На УУ подают (программируют) воздействие, которое определяет цель управления. Такое воздействие называется управляющим или задающим воздействием на систему.
ОБЩИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ К КУРСОВОЙ РАБОТЕ • • • Управление каким-либо объектом – это процесс воздействия на него с целью обеспечения требуемого течения процессов в объекте или требуемого изменения его состояния. Управление, осуществляемое без участия человека, называется автоматическим управлением. Под объектом управления (ОУ), в общем случае, понимают совокупность взаимосвязанных технических средств и биологических объектов, которыми необходимо управлять для достижения цели. Техническое устройство, с помощью которого осуществляется автоматическое управление объектом, называется управляющим устройством (УУ). Совокупность объекта управления и управляющего устройства образует систему автоматического управления (САУ). Параметр ОУ, которым управляют, называется управляемой величиной. Воздействие, которое прикладывается к ОУ со стороны УУ для изменения управляемой величины, называется управляющим воздействием на объект. На состояние ОУ и УУ влияют воздействия, которые вызывают изменение управляемой величины, мешая процессу управления. Такие воздействия называют возмущающими воздействиями. На УУ подают (программируют) воздействие, которое определяет цель управления. Такое воздействие называется управляющим или задающим воздействием на систему.
 • АФЧХ разомкнутой системы
• АФЧХ разомкнутой системы
 • • • Переходная функция по управляющему воздействию температуры в климатической камере hmax 1 – максимальное значение регулируемой величины. hуст – установившееся значение регулируемой величины • • Если нет специальных требований к системе, то нормальным считается перерегулирование σ ≤ 30 %. Переходная функция по возмущающему воздействию температуры в климатической камере
• • • Переходная функция по управляющему воздействию температуры в климатической камере hmax 1 – максимальное значение регулируемой величины. hуст – установившееся значение регулируемой величины • • Если нет специальных требований к системе, то нормальным считается перерегулирование σ ≤ 30 %. Переходная функция по возмущающему воздействию температуры в климатической камере