7d1868682e66c8b9c2004b1bb9d57d76.ppt
- Количество слайдов: 26


, 乃是自動化搬運物料 的一種更廣泛應用,它是一種獨立作業的搬 運系統,在製程中擔任材料倉儲、運輸 作, 適於搬運不同的物料,自不同的負載點至不 同的卸載點,使得生產線彈性化、降低成本, 動力通常由蓄電池供應,路徑通常是藉埋在")
AGVS之定義 無人搬運車系統簡稱 AGVS( Automated Guided Vehicle System), 乃是自動化搬運物料 的一種更廣泛應用,它是一種獨立作業的搬 運系統,在製程中擔任材料倉儲、運輸 作, 適於搬運不同的物料,自不同的負載點至不 同的卸載點,使得生產線彈性化、降低成本, 動力通常由蓄電池供應,路徑通常是藉埋在 地板下的電線或地板表面的反射漆來完成, 靠著車上的感測器引導車子依循電線或圖漆 前進,來達成無人操控的搬運方式。

AGV之背景 無人搬運車在先進國家於 80年代便普遍應 用。近年來台灣社會變遷,勞 意識抬頭, 企業才積極引進自動化設備,而 AGV就像一 座橋,把設備與設備連接在一起,其優於手 動運輸在於 安全 成本 毀損 生產計劃 存貨 控制等,使得人力不足、送錯料、待料等問 題,迎刃而解,因此,無人搬運車的服務,在 製造業取得競爭優勢的自動化生產過程中, 乃是不可或缺的重要設備。

AGV的組成與發展 無人搬運車前身為軌道式導引車,系藉輸 出入訊號控制,使搬運車沿預先舖設的各式 軌道運行,其原理與軌道式相同,只不過以 雷 射、 磁力 、 電力 或 導線 系統架設,不佔空間。 此外,AGV除了藉輸出入訊號回饋目前之位置 與狀態,尚具有可移動其所託載物較高精確 度之要求。所以,再目前業界一片即時化 JIT( Just In Time) 的聲浪中, AGV亦為執行倉儲發 料之生產利器。

AGV之分類 引導方式 以實用性分有磁帶引導、電磁引導、光 帶引導、導線引導等方式。其中以光帶引導方 式發展較快,但電磁感應引導和導線引導方式 佔有較大比例。 通訊方式 可分光數據傳輸式及無線電式,都可以與 PC連線,無線電式更可達到 ON LINE監控,而 光數據傳輸式也可在任意 作站或交通管制, 立即更改路徑或命令,達到半 ON LINE功能。

行走驅動方式 由於電子技術提升,以前使用伺服馬達 作為動力,目前已可以改用 DC馬達準確地 控制移動,使得成本相對降低。 AGV也有使 用交流伺服馬達,但在有限的空間與電力下, 如何提升交流伺服馬達效率及溫升,都是一 大課題。 移載方式 一般 AGV移載方式都可依客戶需求, 加以修改成為各種不同行走方式移載機。
 3. 裝配線作業 4. 彈性製造系統 5. 其他各種應用")
AGV的應用 1. 無人駕駛火車 2. 自動倉儲(AS/RS) 3. 裝配線作業 4. 彈性製造系統 5. 其他各種應用
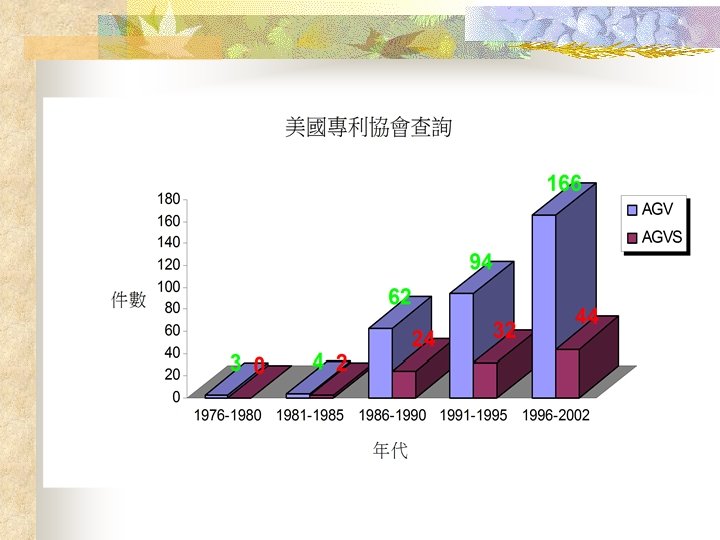

專利名稱 專利權類別 發明國家 發明人 公告日期 用以導引AGV之導引系統及用以 切換自動路軌導引車輛之方法 半導體 廠自動化系統及用以控 制自動引導車輛之方法 具有同步存取埠之倉儲裝置及自 動化搬送系統 磁傳導電力裝置 發明 美國 20020201 發明 韓國 柯耐爾W.阿 洛夫 高明載 發明 台灣 林立人 20010528 新型 台灣 張俊謙 20010321 模組化基材加 系統及方法 發明 美國 約翰M.懷特 20010321 用以在檢查處理設備是否處於合 適模式後移送晶圓卡匣之方法 使用一檔案伺服器之自動化系統 及其控制方法 晶圓匣傳輸系統與方法 發明 韓國 金相龍 20010221 發明 韓國 邊聖 20001101 發明 韓國 金相龍 20000611 半導體晶圓製造設備控制方法及 半導體晶圓製造設備 物品積載容器之移載裝置 發明 日本 岩崎順次 20000411 發明 日本 大井建一 19990801 車輛定位裝置 發明 美國 19960521 移動式機器人之自備視覺系統 發明 美國 可尼爾.亞洛 夫 維吉.麥庫瑞 20011221 19900121

Outline 1. 導引系統以無人搬運車為例 2. 無人搬運設備 3. 用以在檢查處理設備是否處於合適模 式後移送晶圓卡匣之方法 4. 自動存提款機作業支援系統

GUIDANCE SYSTEM FOR AN AUTOMATED GUIDED-VEHICLE n n n Pub. No: US 2001/0001843 A 1 Pub. Date: May 24, 2001 Appt. No: 09. 038, 693 Filed: Mar. 9, 1998 Inventors: CORNELL. W. ALOFS; RON ALD R. DRENTH Int. Cl: G 01 C 22/00

AGV導引系統 q軌道引導系統 q非軌道引導系統

Abstract n 軌道導引系統目的是 使 AGV保持一般直線 路徑 n 此系統允許一個無人 車在高速率情況下去 移動
")
Abstract n n 非軌道導引系統目的 是直接使 AGV從第一 個軌道部分的末尾到 另一端的開始。 此系統除去了轉換軌 道的需要 (也就是軌道 導引的車輛從一個軌 道部分轉換到另一個 軌道的需要)

Summary of the inventory n n n 此發明是有關 AGV的控制系統,區分為軌 道高速系統、無軌道慢速系統。 此系統可以消除軌道或 switch的方式轉軌, 其結果可以使 AGV在有軌道的情形下高速 且安全行駛。 此系統不需要 switch或是監督系統,因為它 會按照固定的路徑行走。

AGV導引系統目的 n 主要在改善無人搬運車的導引系統 n 以不用 switch的方式導引 AGV轉換軌道

導引系統未來發展 n 善加利用導引裝置使未來能夠沿著路 徑,高速或慢速行駛。 n 為了有高速的 AGV, 希望整合導引軌道 裡有訊號接收器的系統。

專利公告日期 : 19970511 專利申請案號 : 85213515 專利申請日期 : 19960902 專利權類別 : 新型 專利名稱 : 無人搬運設備 專利代理人 : 詹銘文 發明人名稱 (地址 ): 胡竹林 (新竹縣竹東 鎮中豐路三段四十五巷四十五弄四十二號 發明人名稱 (地址 ): 鍾金權 鎮 業一路七巷四號 ) ) (新竹縣竹東

1. 一種利用 雷射裝置導引的無人搬運設備 ,該設備包括: - 無人搬運車 ,為提供載重及運送貨物之裝 置。 - 雷射光源 ,約安置在該無人搬運車前端的 中央上方,每隔一特定的時間發射一雷射光。 - 複數個光感應器 ,安置於該雷射光源的兩 側,用以偵測該雷射光反射後的訊號,並將 之傳送予該無人搬運車,藉以修正該無人搬 運車的行進方向。 - 複數個弧形鏡面 ,將該弧形鏡面一段一段 的銜接起來,以規劃出該無人搬運車的行進 路線。
 q利用鐳射掃描光束 與空間佈置的反射板。 投入使用簡單,容易 擴充,靈活性最好。 q定位誤差僅 ± 2 mm, 複雜的系統可 使運行 非常安全。 q適用於室內外場地,")
雷射導引無人搬運車( LGV) q利用鐳射掃描光束 與空間佈置的反射板。 投入使用簡單,容易 擴充,靈活性最好。 q定位誤差僅 ± 2 mm, 複雜的系統可 使運行 非常安全。 q適用於室內外場地, 不受氣候的影響。
類似, 均是利用 已知座標的參考點,計算出航行 器目前所在的位置。 此項技術以 雷射掃瞄器 收集反射片的夾角")
雷射導引無人搬運車 n n 雷射導引的基本概念與飛機、船舶定位, 所使用的 GPS(Global Positioning System)類似, 均是利用 已知座標的參考點,計算出航行 器目前所在的位置。 此項技術以 雷射掃瞄器 收集反射片的夾角 及位置座標,再輔以 編碼器 作精密繁複的 運算,可準確的控制及導引 LGV的方向及 定位。

專利公告號: 423093 專利公告日期: 20010221 專利申請案號: 87100868 專利申請日期: 19980122 公告卷數: 028 公告期數: 006 專利權類別: 發明 專利權證書號: 000000 專利名稱: 用以在檢查處理設備是否處於合適模式 後移送晶圓卡匣之方法 國際專利分類: H 01 L 21/66 發明人名稱 (地址): 金相龍 (韓國 ) 申請人名稱 (地址): 三星電子股份有限公司 (韓國 ) 專利代理人: 惲軼群 , 陳文郎

AGV 處理設備 發出訊號 回覆訊息 位置感應 資料回傳 採取動作 感應器 管理系統
; Chigira; Kenichi (Maebashi, JP)….")
ATM operation supporting system n Inventors: Kobayashi; Norio (Maebashi, JP); Chigira; Kenichi (Maebashi, JP)…. n Assignee: Fujits Limited (Kawasaki, JP) Appl. No. : 734789 Filed: October 22, 1996 Pub. Date: January 11, 2000 n n n
 Counting section (計算單元) Control section (控制單元) ATM AGV 計算帳單 hub Counting")
mobile cart (移動式車輛) Counting section (計算單元) Control section (控制單元) ATM AGV 計算帳單 hub Counting section 資料回傳 訊 息 補充帳單, 現金 Control section

結論 隨著製造技術的發展, AGV之用於生產線 中,以漸成為趨勢但並非所有 AGV系統都能 適用於任何形式的生產作業不適用的設計可 能無法有效發揮 AGV應有的功能,產能無法大 量提高,使得生產成本不能降低,造成大筆投 資資金浪費,因此一個 AGV的設計應詳加考 量並規劃 所要移動的物料數量、物料移動的 途程、裝載物、廠房佈置、交通因素 等重要因 素。
7d1868682e66c8b9c2004b1bb9d57d76.ppt