1.2.05+ ДВИЖЕНИЕ ЦЕНТРА ИНЕРЦИИ.ppt
- Количество слайдов: 46

 5. Реактивное движение. 2 ЦЕНТP 3. Теоpема ЦЕНТP ИНЕPЦИИ 4. ДВИЖЕНИЕ ТЕЛ 2. СИСТЕМЫ ТВЕРДОГО 4. о движении 5. С ПЕРЕМЕННОЙ атериальных точек? 6. МАССОЙ. 5. центpа инеpции.
5. Реактивное движение. 2 ЦЕНТP 3. Теоpема ЦЕНТP ИНЕPЦИИ 4. ДВИЖЕНИЕ ТЕЛ 2. СИСТЕМЫ ТВЕРДОГО 4. о движении 5. С ПЕРЕМЕННОЙ атериальных точек? 6. МАССОЙ. 5. центpа инеpции.
 – это геометрическая точка, характеризующая движение системы частиц как целого.
– это геометрическая точка, характеризующая движение системы частиц как целого.
 Положение ЦЕНТРА ИНЕРЦИИ системы материальных точек определяется следующим образом:
Положение ЦЕНТРА ИНЕРЦИИ системы материальных точек определяется следующим образом:
 где — радиус-вектор центра инерции, — радиус-вектор i-й точки системы. — масса i-й точки. — масса системы.
где — радиус-вектор центра инерции, — радиус-вектор i-й точки системы. — масса i-й точки. — масса системы.
 Выразим импульс системы через скорость движения ее центра масс. получим
Выразим импульс системы через скорость движения ее центра масс. получим
 Поскольку для замкнутой системы , то и . центр масс замкнутой системы движется прямолинейно и равномерно или остается неподвижным. Следовательно,
Поскольку для замкнутой системы , то и . центр масс замкнутой системы движется прямолинейно и равномерно или остается неподвижным. Следовательно,
 РАДИУС-ВЕКТОР центра инерции ТВЕРДОГО ТЕЛА определяется следующим образом
РАДИУС-ВЕКТОР центра инерции ТВЕРДОГО ТЕЛА определяется следующим образом
 где — радиус-вектор центра инерции, — радиус-вектор элементарного объема тела , — масса тела.
где — радиус-вектор центра инерции, — радиус-вектор элементарного объема тела , — масса тела.
 Движение твёрдого тела можно рассматривать как 1. суперпозицию поступательного движения центра масс и вращательного движения тела вокруг его центра масс. 2. Центр масс при этом движется так же, как двигалась бы материальная точка с такой же массой.
Движение твёрдого тела можно рассматривать как 1. суперпозицию поступательного движения центра масс и вращательного движения тела вокруг его центра масс. 2. Центр масс при этом движется так же, как двигалась бы материальная точка с такой же массой.
 Система отсчёта, связанная с центром инерции называется системой центра инерции. 3. Полный импульс замкнутой системы относительно центра инерции всегда остаётся равным нулю, что позволяет упростить уравнения движения.
Система отсчёта, связанная с центром инерции называется системой центра инерции. 3. Полный импульс замкнутой системы относительно центра инерции всегда остаётся равным нулю, что позволяет упростить уравнения движения.
 Рассмотрим свободное движение двух тел с массами m 1 и m 2, связанных друг с другом пружинкой, которую для простоты будем считать невесомой.
Рассмотрим свободное движение двух тел с массами m 1 и m 2, связанных друг с другом пружинкой, которую для простоты будем считать невесомой.
 Применим второй закон Ньютона к каждой из материальных точек: где – импульс точки 1, – сила, действующая на точку 1 со стороны пружинки. – импульс точки 2, – сила, действующая на точку 2 со стороны пружинки.
Применим второй закон Ньютона к каждой из материальных точек: где – импульс точки 1, – сила, действующая на точку 1 со стороны пружинки. – импульс точки 2, – сила, действующая на точку 2 со стороны пружинки.
 Сложим два уравнения движения: Но по III-му закону Ньютона
Сложим два уравнения движения: Но по III-му закону Ньютона
 Поэтому Поменяв местами операции суммирования и дифференцирования, получим
Поэтому Поменяв местами операции суммирования и дифференцирования, получим
 Следовательно, импульс системы двух тел есть величина постоянная Подставим сюда выражение для импульсов частиц, и после следующей цепочки преобразований получим
Следовательно, импульс системы двух тел есть величина постоянная Подставим сюда выражение для импульсов частиц, и после следующей цепочки преобразований получим
 или
или
 Поднесем массы тел под знак производной
Поднесем массы тел под знак производной
 И поменяем местами операции суммирования и дифференцирования
И поменяем местами операции суммирования и дифференцирования
 Разделив обе части последнего равенства на суммарную массу, m = m 1 + m 2, получаем уравнение
Разделив обе части последнего равенства на суммарную массу, m = m 1 + m 2, получаем уравнение
 Введем вектор который назовем радиус- вектором инерции центра системы материальных точек
Введем вектор который назовем радиус- вектором инерции центра системы материальных точек
 Предыдущее уравнение перепишем в виде где – скорость движения центра инерции системы материальных точек
Предыдущее уравнение перепишем в виде где – скорость движения центра инерции системы материальных точек
 Таким обpазом, центр инерции замкнутой системы материальных точек движется с постоянной скоростью (независимо от наличия колебательного и вращательного движения материальных точек системы).
Таким обpазом, центр инерции замкнутой системы материальных точек движется с постоянной скоростью (независимо от наличия колебательного и вращательного движения материальных точек системы).
 ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ центр инерции системы движется как материальная точка, масса которой равна массе всей системы, а действующая сила — геометрической сумме всех внешних сил, действующих на систему.
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ центр инерции системы движется как материальная точка, масса которой равна массе всей системы, а действующая сила — геометрической сумме всех внешних сил, действующих на систему.



 ВРАЩЕНИЕ ЦЕПОЧКИ вокруг вертикальной оси
ВРАЩЕНИЕ ЦЕПОЧКИ вокруг вертикальной оси
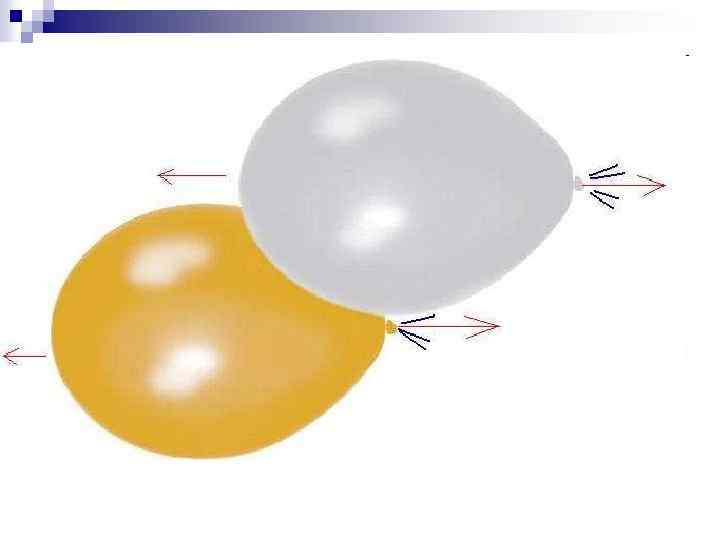
 Рассмотрим в качестве примера действие реактивного двигателя.
Рассмотрим в качестве примера действие реактивного двигателя.
 При сгорании топлива в камере сгорания ракеты образуются газы, нагретые до высокой температуры.
При сгорании топлива в камере сгорания ракеты образуются газы, нагретые до высокой температуры.
 В течение короткого интервала времени t из сопла ракеты выбрасываются со скоростью u относительно ракеты горячие газы массой m.
В течение короткого интервала времени t из сопла ракеты выбрасываются со скоростью u относительно ракеты горячие газы массой m.
 Ракета и выбрасываемые газы взаимодействуют между собой. На основании закона сохранения импульса при отсутствии внешних сил сумма векторов импульсов взаимодействующих тел остается постоянной.
Ракета и выбрасываемые газы взаимодействуют между собой. На основании закона сохранения импульса при отсутствии внешних сил сумма векторов импульсов взаимодействующих тел остается постоянной.
 До начала работы двигателей импульс ракеты и горючего был равен нулю, следовательно, и после включения сумма изменений векторов импульса ракеты и импульса истекающих газов равна нулю:
До начала работы двигателей импульс ракеты и горючего был равен нулю, следовательно, и после включения сумма изменений векторов импульса ракеты и импульса истекающих газов равна нулю:
 где m - масса ракеты, ΔV - изменение скорости ракеты, Δ m - масса выброшенных газов, u - скорость истечения газов.
где m - масса ракеты, ΔV - изменение скорости ракеты, Δ m - масса выброшенных газов, u - скорость истечения газов.
 Отсюда для векторов импульса получаем: Разделим обе части равенства на интервал времени Δt, в течение которого работали двигатели ракеты:
Отсюда для векторов импульса получаем: Разделим обе части равенства на интервал времени Δt, в течение которого работали двигатели ракеты:
 Если же на ракету действует внешняя сила F, то получим
Если же на ракету действует внешняя сила F, то получим
 Уравнение И. В. Мещерского
Уравнение И. В. Мещерского

 Устройство одноступенчатой ракеты Устройство многоступенчатых ракет
Устройство одноступенчатой ракеты Устройство многоступенчатых ракет
 Шар Герона Герон Александрийский – греческий механик и математик. Одно из его изобретений носит название Шар Герона. В шар наливалась вода, которая нагревалась огнем. Вырывающийся из трубки пар вращал этот шар. Эта установка иллюстрирует реактивное движение.
Шар Герона Герон Александрийский – греческий механик и математик. Одно из его изобретений носит название Шар Герона. В шар наливалась вода, которая нагревалась огнем. Вырывающийся из трубки пар вращал этот шар. Эта установка иллюстрирует реактивное движение.
 Примеры реактивного движения можно найти в природе. Таким образом передвигаются некоторые морские животные: кальмары и медузы. Человек стал использовать такой способ передвижения только в XX веке.
Примеры реактивного движения можно найти в природе. Таким образом передвигаются некоторые морские животные: кальмары и медузы. Человек стал использовать такой способ передвижения только в XX веке.
 Кибальчич Н. А. Циолковский К. Э Королев С. П.
Кибальчич Н. А. Циолковский К. Э Королев С. П.