

Лекция 4.ppt
- Количество слайдов: 34

 1. Основная лемма статики Всякая сила , приложенная к АТТ в точке А, эквивалентна той же силе, приложенной в другой точке В, и паре сил, момент которой равен моменту этой силы, приложенной в точке А, относительно точки В.
1. Основная лемма статики Всякая сила , приложенная к АТТ в точке А, эквивалентна той же силе, приложенной в другой точке В, и паре сил, момент которой равен моменту этой силы, приложенной в точке А, относительно точки В.
 ДОКАЗАТЕЛЬСТВО: А
ДОКАЗАТЕЛЬСТВО: А
 А В
А В
 А В
А В
 А C d В
А C d В
 2. Приведение произвольной системы сил к центру Задана произвольная система сил:
2. Приведение произвольной системы сил к центру Задана произвольная система сил:

 x O y z
x O y z
 x d O y z
x d O y z
 x O y z
x O y z
 x O y z
x O y z
 x O y z
x O y z

 x O y z
x O y z
 x O y z
x O y z
 Любая произвольная пространственная система сил в результате приведения к некоторому центру О заменяется приложенной в этой точке результирующей (1) силой и результирующей парой, момент которой равен векторной сумме моментов всех сил относительно центра О: (2)
Любая произвольная пространственная система сил в результате приведения к некоторому центру О заменяется приложенной в этой точке результирующей (1) силой и результирующей парой, момент которой равен векторной сумме моментов всех сил относительно центра О: (2)
 Элементы приведения:
Элементы приведения:
 Инварианты приведения При перемене центра приведения неизменными остаются:
Инварианты приведения При перемене центра приведения неизменными остаются:
 О
О
 ДИНАМА О* О изменяется в зависимости от центра приведения
ДИНАМА О* О изменяется в зависимости от центра приведения
 -необходимое и достаточное условие равновесия") 1. Случай пространственной произвольной системы сил (3) -необходимое и достаточное условие равновесия
1. Случай пространственной произвольной системы сил (3) -необходимое и достаточное условие равновесия
") Скалярная форма: (4)
Скалярная форма: (4)
 (6)") 2. Случай плоской системы сил Пусть все силы лежат в плоскости Oxy (5) (6)
2. Случай плоской системы сил Пусть все силы лежат в плоскости Oxy (5) (6)
: Для равновесия плоской системы сил необходимо и достаточно, чтобы") Теорема 1 (о трех моментах): Для равновесия плоской системы сил необходимо и достаточно, чтобы сумма моментов всех сил относительно каждого из трех произвольно выбранных, но не лежащих на одной прямой центров, равнялась нулю (7)
Теорема 1 (о трех моментах): Для равновесия плоской системы сил необходимо и достаточно, чтобы сумма моментов всех сил относительно каждого из трех произвольно выбранных, но не лежащих на одной прямой центров, равнялась нулю (7)
 Доказательство: y А x B C
Доказательство: y А x B C
 Теорема 2: Для равновесия плоской системы сил необходимо и достаточно, чтобы сумма моментов всех сил относительно двух произвольных центров и сумма проекций всех сил на произвольную ось, не перпендикулярную прямой, соединяющей эти центры, равнялась нулю
Теорема 2: Для равновесия плоской системы сил необходимо и достаточно, чтобы сумма моментов всех сил относительно двух произвольных центров и сумма проекций всех сил на произвольную ось, не перпендикулярную прямой, соединяющей эти центры, равнялась нулю
") Доказательство: y B A x l (8)
Доказательство: y B A x l (8)
 y B A x l
y B A x l
 3. Случай параллельных сил y O x
3. Случай параллельных сил y O x
 Вторая форма: (10)") Первая форма: (9) Вторая форма: (10)
Первая форма: (9) Вторая форма: (10)
 ПРИМЕР ПЛОСКОЙ СИСТЕМЫ СИЛ:
ПРИМЕР ПЛОСКОЙ СИСТЕМЫ СИЛ:
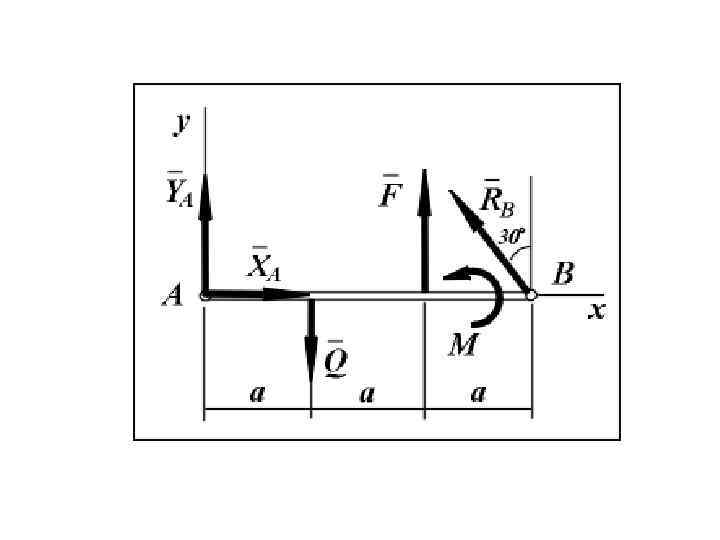
 Уравнения равновесия: Сумма сил в проекции на ось x: Сумма сил в проекции на ось y: Сумма моментов относительно центра А:
Уравнения равновесия: Сумма сил в проекции на ось x: Сумма сил в проекции на ось y: Сумма моментов относительно центра А: