a654229e47f7df6b769c30360b78685e.ppt
- Количество слайдов: 26



배관의 내부검사용 이동로봇 및 조향장치 등록번호: 10 -367823, 10 -392816 특허권자: 최 혁 렬 외 2명

CONTENTS n Introduction n Previous Technology Intelligent Pig Mobile Robots n Multifunctional Robotic crawler for INpipe in. SPECTion(MR-INSPECT) Robotic Crawler( Version I, III ) Ultrasonic NDT Unit Other Characteristic System Feature

수요전망

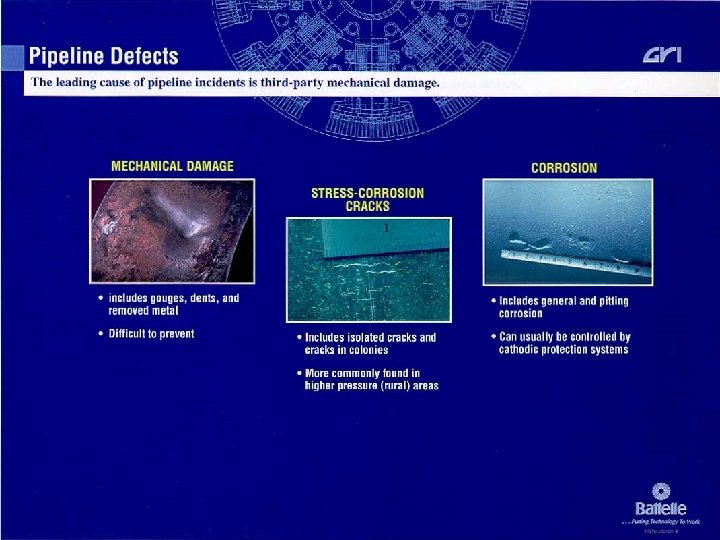
Background n Situation Gas pipelines of Korea have been constructed since 1980’s Main transportation line(KOGAS): 1, 482 km Urban gas pipelines: 12, 097 km Regulatory demand for inspection and replacement of underground pipelines aged over 15 years Enormous budget for pipeline inspection, replacement and repair n Remedies F Adequate NDE equipment and instrumentation F Life assessment technology F Regulation and law for integrity evaluation F Systematic maintenance program for gas supplier
 70 kg/cm 2 LNG 인수기지 도시가스 공급관(도시가스회사) 배급관 주배관")
국내도시가스 배급체계 가스수송관 (KOGAS ) 70 kg/cm 2 LNG 인수기지 도시가스 공급관(도시가스회사) 배급관 주배관 G 18 kg/cm 2 G G 10 kg/cm 2 이하 정압기 (인도네시아에서 수입) G 200 mm. H 2 O 개인사용자 Main Line 3~4 kg/cm 2 G 업소용 산업용 가스수송관 • 대구경, 고압, 직선관 • 검사, 보수 용이 • 인구밀집지역과 거리유지 • 비교적 안전 도시가스 공급관 • 소구경, 저압, 복잡한 배관형상 • 검사, 보수 어려움 • 인구밀집지역에 분포 • 비교적 위험함
 Pig b) Manual c) Wheel d) Crawler e) Leg f) Inchworm")
Basic Forms a) Pig b) Manual c) Wheel d) Crawler e) Leg f) Inchworm



Robotic systems

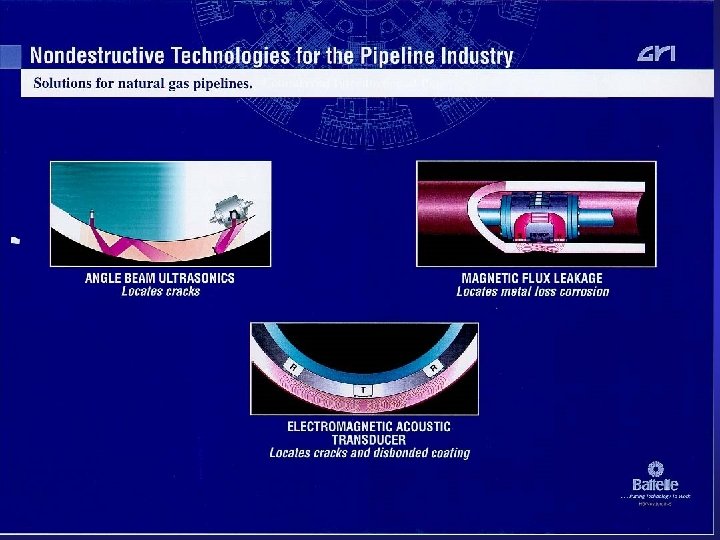
System Components • Robot – portable scanner, robotic crawler, mobile platform – mobility, tracking force, size, speed, navigation distance • Measurement – visual inspection: CCD camera – nondestructive inspection: ultrasonic, magnetic flux leakage, eddy current – signal processing: realtime embedded signal processing with DSP • Control – system Controller: embedded Controller – communication: optical cable, wireless communication(? ) – power: external power(tether cable), battery(? ) • Manipulation – – teleoperation(master handle), autonomous navigation user interface, monitoring, graphic display signal processing data storage
")
Multifunctional Robotic Crawler for INpipe In. SPECTion (MR-INSPECT)

Robotic Non. Destructive Inpipe Inspection System Inpipe Inspection Robot NDT unit Ground Station Mobility Functionality (Measurement, manipulation, monitoring)
")
Robotic Crawler(Version 0)
")
Robotic Crawler(Version I)
")
Robotic Crawler(Version II)
 Control Module CCD Camera Driving Robot Double Active Universal Joint")
Robotic Crawler(Version III) Control Module CCD Camera Driving Robot Double Active Universal Joint

")
Steering Mechanism (Active Universal Joint)

System Configuration
 •")
System Specifications n Navigation • pipeline size: 160~240 mm( nominally 200 mm ) • speed: 3~5 m/min • horizontal, vertical, elbow, branch, reducer, valves, omnidirectional steering • navigation distance: 500 m + 500 m n System control, measurement instrumentation: visual inspection, ultrasonic NDT • embedded controller: 80196 CPU, microelectronic components • serial data transmission with optical cable and RS-232 C • tether cable: Optical cable(4) + Power cable(2) n Global Positioning • two CCD Cameras in front and back for visual inspection and navigation • navigation distance: odometer, tether cable • horizontal, vertical orientation 3 D Virtual Map

Summary n Remote automated NDE technology n Development of MR-INSPECT n Development strategy Mobile platform with standard plug-in NDE instrumentation Robotic Crawler NDT Instrumentation n Future Works Component technology( actuator, sensor, power etc ) Navigation distance( whole stem drive ) In-Service Inspection(launching equipment) Various fluid( packing, anti-explosion treatment etc. ) Other applications(wall climbing robot)

Conventional Method Whole Stem Drive


Wall Climbing Robot
a654229e47f7df6b769c30360b78685e.ppt