eb6c6adefb6203071f5be3f4a4b99871.ppt
- Количество слайдов: 121



第一章 I/A Series 系统概述 1. I/A Series 智能自动化系列是开放式的DCS 系统 开放系统体现在硬件、 软件和通讯网络的设计上均全面采用国际公认的标准; 在软件 上采用与标准的 UNIX 系统完全兼容的 VENIX 和 SOLARIS 操作系统。 • I/A Series 的应用软件与硬件彼此独立, 不会因硬件更新而使现有的软件失效。 另外与 UNIX 兼容的由第三方开发的软件, 可以不作修改或 稍作修改即可应用于 I/A Series 中。 • 采用 C 和 FORTRAN 等高级编程语言, 以便于软件资源的共享。 • I/A Series 是世界上第一个全面采用 IEEE 802 标准的 业控制系统。 其节点总线 一般采用的是 IEEE 802. 3 标准。 在宽带和载波带局域网采用了 IEEE 802. 4 标准, 现场总线采用 IEEE 1118 标准。

2. I/A Series 智能自动化系列的特点 I/A Series 自动化系列的最大特点是系统的软件、 硬件和通讯系统都广泛 采用开放型 硬件, 品种少可靠性高, 组态灵活。 硬件 - I/A Series 四代兼容, 从 CISC 到 RISC , 从 Intel 到 MICRO SPARC 实现了长寿命 的设计思想。 由于硬件品种少, 大大节省了用户在备件上的开销。 现场总线设计思想领 导了当今分散控制发展的方向,节省了用户在布线上的开销。 软件 - 与 UNIX 系统 V 兼容的实时多任务 VENIX 操作系统和 Sun. Soft Solaris 操作系统, 96 年推出基于 Window NT 的操作系统;采用 C, FORTRAN 等广泛使用的高级编程语言, SQL 关系型数据库语言和 INFORMIX 等 商用软件。 软件独立于硬件, 这样当福克斯波罗提供新型号的硬件时不会 影响已有的应用状况。

通讯 - 建立于 OSI 模型上, 符合 IEEE 的标准, 遵循 MAP 协议, 这 样可以使与 MAP 兼容的非福克斯波罗产品纳入 I/A Series 系统。 这种非排它 性使用户能兼收并蓄各家产品的长处, 构成满意的综合控制系统。 显示 - 采用先进的实时目标管理技术, 这是其它系统所无法比拟的。 另外 50 系列采用了 X-Window 和 Open Look 技术, 可方便地访问整个 I/A Series 系统和所连接的信息网络上的信息。 Fox. Draw 软件提供三维空间的显示 画面。 发展 - 硬件与软件的发展可相互独立发展。 这样在升级硬件时不影响软 件, 同样在升级软件时不影响硬件。 一体化 - 通过通过以太(Ethernet)网接口与信息网络联接, 以及提供 智能现场仪表(IFD)接口与 IFD 的数字集成, 从而实现了生产管理信息网、 生产控制网到测量的一体化。
 和多变量自整定(EXACT MV) 在内的 复杂计算能力; I/O 组件全部为变压器耦合隔离和光电隔离, 一对一转换, 过流保 护,不用保险丝, 提高系统运行时间。 联网")
I/O - 一线控制器已经具有包括自整定(EXACT) 和多变量自整定(EXACT MV) 在内的 复杂计算能力; I/O 组件全部为变压器耦合隔离和光电隔离, 一对一转换, 过流保 护,不用保险丝, 提高系统运行时间。 联网 - 真正实现了与上位机过流系统的联网(例如: DECnet, TCP/IP, NOVELL), 实时画面和数据传递。 · 可靠性 - 采用表面安装技术(SMT) ,尺寸小, 系统结构简单; 电子组件采用全密封 的结构,使其于周围环境的接触降低到最低水平, 增强了抗腐蚀的能力; 控制容错技术- 通讯冗余技术和矩阵供电方式, 保证了系统运行的可靠性。 功耗 - 系统功耗极低, 大大降低能源投资, 系统功耗只是常规系统的 1/3。 维护 - 各种处理机和 I/O 卡件都有自诊断程序, 可进行报警打印, CRT 报警显 示, 有故障的组件红灯显示, 无需人 判断。 所有组件都可带电更换。 联网 - 真正实现了与上位机管理系统的联网(例如: DECnet, TCP/IP, NOVELL), 实时画面和数据传递。

I/A Series 的网络结构
 载波带局域网 ( CARRIERBAND LAN ) 节点总线(NODE BUS) 现场总线(FIELD")
I/A Series 的通讯网络结构分为分为四个层次: 宽带局域网 (BROADBAND LAN) 载波带局域网 ( CARRIERBAND LAN ) 节点总线(NODE BUS) 现场总线(FIELD BUS) 这些通讯标准的低层通讯(物理层和逻辑层)均 与制造商自动化协议(MAP)兼容。 出于通讯的 安全考虑, 节点总线是冗余的, 载波带可选冗余。
概念来构成的。 功能: 节点独立运行, 完成自动控制的各种功能。 并可通过兼容网络与其他 Foxboro或 非 Foxboro")
4. I/A Series 智能自动化系列的节点 I/A Series 的系统结构是按节点(NODE)概念来构成的。 功能: 节点独立运行, 完成自动控制的各种功能。 并可通过兼容网络与其他 Foxboro或 非 Foxboro 节点相连。 节点的概念:是由节点总线将称之为站( Station )的处理机组件连在一起构成 的, 每一组件是独立的, 并完成系统中一些特定的功能, 而它的特定功能是 由软件定义的。 节点总线为 I/A Series 系统中的各个站(控制处理机、 应用处理机等)之间, 提供高速、 冗余、 点到点的通讯, 而具有优异的性能和安全性, 这方面远远 超过一般 DCS 中的平行底板方式。 节点总线最多能够为 64 个 I/A Series 处理机站和可能使用的节点总线扩展组件提供 通讯能力。 I/A Series 可以包含控制处理机 (CP)、应用处理机(AP)、操作站处理机 (WP)、 通讯处理机(COMMP)、节点总线扩展组件、载波带接口组件、节点总线接口组件、 AB 或 MODICON PLC 接口处理机和油罐计量处理机等。

IA系统的安全设计方案: 1、节点总线是冗余的, 当系统中出现任何一个单点故障的情况下也能 作 。 冗余还延 伸到每个站中的节点总线接口电路。 当发送报文时, 站就在 二个冗余总线之间作交替。 万 一一条总线发生故障, 站的管理软件检 测到故障, 则在故障的总线修复前, 所有要继续传 送的报文,由正常 作的总线执行。 2、节点总线接口还利用了完善的传输出错检测技术。 节点总线中使用一个奇偶位去检测每次传送的信号, 而且在检测到故 障后, 也设有数据重发的保证措施。 节点总线接口使用的是一个 32 位错误检测码, 该检测码附属在传送的信息中一起传送, 以使完善地 校验所有发送的报文。 这样,节点总线在错误检测方面提供了重发, 增强了系统的安全性和可靠性。
: 与大容量存储器相连, 存储系统信息和过程 控制方案与数据;")
图 1 - 3 节点总线示意图 节点的构成 节点上主要有四种处理机 · 应用处理机 (Application Processor): 与大容量存储器相连, 存储系统信息和过程 控制方案与数据; 以及可选地与信息网络(Ethernet)相连, 提供双向 的信息和图象的交换。 · 作站处理机 (Workstation Processor): 与 CRT, 程师键盘,操作键盘和其它操 作站设备相连; 以及可选地与信息网络相连, 提供源于其它相连计算机 上的 X-Window 显示画面。 · 控制处理机 (Control Processor) : 可与 I/A Series 现场总线组件和设备相连, 完成控 制功能 · 通讯处理机 (Communication Processor) : 通过 RS-232-C 串行接口可连接打印机, VT-100 终端或调制解调器。
 · 节点总线扩展组件和在 I/A 与其他网络及设备间提供通讯的各种网间连接器。 · SPECTRUM 网间连接器。 ·")
节点总线上还可以挂其它的功能处理机, 如: · 信息网络接口 (DECNET,NOVELL 等) · 节点总线扩展组件和在 I/A 与其他网络及设备间提供通讯的各种网间连接器。 · SPECTRUM 网间连接器。 · 仪表网间连接器,用来连接 760、761 单回路控制器。 Modicon 网间连接器,连接节点总线和 Modicon Modbus,使 Modicon 可编程控制器 的数 据可组态进入 I/A Series 网络。 · Allen-Bradley 数据通道网间连接器,连接 Allen-Bradley 的可编程控制器。 · 个人计算机操作站接口, 有两种接口组件用于把个人计算机组态为个人操作站, 它们 是节点总线接口和现场总线接口。 节点总线接口把可兼容的个人计算机连接到节点总线,这样, 个人计算机能用作个人 台式操作站完成应用处理机和操作站处理机的组合功能。 现场总线接口把一个可兼容的个人计算机和现场总线组件连接, 使个人计算机 具有控制处理机、 应用处理机和操作站处理机的功能, 它能执行数据收集、 连续控制、 梯形逻辑控制和顺序控制。
 现场总线上连 CP, 下接现场总线组件(FBM, 即 I/O 卡件); FBM 是现场传感器/执行器与控制处理机的接口。 FBM 对现场设备使用的电气输入/输出信号进行适当地转换使得通过现场总线能与这些装 置通讯。 现场组件可与控制处理机")
5、现场总线(Fieldbus) 现场总线上连 CP, 下接现场总线组件(FBM, 即 I/O 卡件); FBM 是现场传感器/执行器与控制处理机的接口。 FBM 对现场设备使用的电气输入/输出信号进行适当地转换使得通过现场总线能与这些装 置通讯。 现场组件可与控制处理机 CP 或运行 I/A Series 综合控制软 件的个人计算机连接。 各种 FBM 与 厂中通常遇到的各种现场信号相匹配。 特点: 由于这 些组件是由软件组态的, 所以它们的品种要比以前的系统少得多。 例如 对各种类型的热电偶和毫伏信号只需要一种组件。 现场总线是一种单主站共用线串行数据通讯总线, 使用同步通讯规范, 现场总 线可以检测出错、冗余出错并且可纠错, 提供了高度的安全性。
应用处理机 AP 完成两个基本功能: · 作为应用处理机(计算机)站,它们完成了大量的计算和管理 · 作为文件服务器站, 它们处理来自文件服务器站本身或其他站的文件请 求。")
6、 I/A Series 智能自动化系列的硬件 (1)应用处理机 AP 完成两个基本功能: · 作为应用处理机(计算机)站,它们完成了大量的计算和管理 · 作为文件服务器站, 它们处理来自文件服务器站本身或其他站的文件请 求。 用于应用处理机的大容量存储设备, 包括软盘驱动器, 硬盘驱动器, 光盘 驱动器和磁带驱动器。 AP特点介绍: • 应用处理机和其他系统站(例如通讯处理机, 作站处理机和控制处理机)协调 作, 提供了数据输入/输出和操作员接口的必要手段。 • 一个较小的智能自动化系列系统可以使用单个应用处理机 , 而一个较大的系统可以由 几个应用处理机组成, 每个应用处理机组态实现专门的功能; 有些功能可以由各个应 用处理机分别完成, 有些功能可以由同一网络中的二个或多个应用处理机共同来完成。 • 每个应用处理机中设计有一个小型计算机系统接口(SCSI)提供 业标准总线(ANSI 标准 ANSC X 3 T 9. 2)支持具有 SCSI 兼容控制器的外部设备。 因此,SCSI 可以灵活应 用于外部设备, 并提供较强的系统性能。

应用处理机功能 * 系统和网络管理功能 应用处理机实现系统管理功能,存储过程操作信息、 实时数据、 历史数据、 提供 报文广播、 处理所有站的报警和报文,并在所有系统站中, 维护一致的时间和日期。 应用处理机还支持各种组态功能 :系统组态、控制组态、显示组态、报警组态、 历史组态等等; 运行应用软件, 提供更多资源和更高性能的应用功能的开发和执行; 还可提供更为可靠的容错型 作模式以及可以互为切换的备份 作模式。 应用处理 机还完成网络管理功能, 包括涉及网络的系统管理功能的那一部分。 * 数据库管理包括存储、 操作和检索各种系统的数据文件。 它采用 业标准 INFORMIX-SOL 关系数据库管理系统。 * 文件请求 * 历史数据管理 应用处理机可组态成包括历史数据库管理软件功能, 它保持应用报文, 连续值 及开关量 值的历史数据。

· 控制功能 应用处理机能和控制处理机一起实现控制功能, 但没有直接过程输入 /输出能力。 所有输入/输出是应用处理机和其它站之间的可连续的参数。 · 用户应用程序执行 · 诊断 应用处理机采用三种诊断方式, 以检测和/或查出故障。 通电自检 运行时间和监视时钟检查 离线诊断 离线诊断是临时装入系统的, 用于对各系统站和设备进行全面的测 试和检查。 应用处理机 AP 51 技术性能简介 · CPU:SPARC IPC 处理机 · 内存:最少 16 MB、可扩充到 256 MB · 内置一个 3. 5“,1. 44 MB 软盘驱动器;一个硬盘驱动器;一个数据流磁带机; 一只 CD ROM 驱 动器 · 有一个 SCSI 接口(Small Computer System Interface),可联接最多 6 个外设 · 串行接口 (打印机或终端口) EIA RS-423 (与 RS-232 C 兼容) 距离 15 m (50 ft) · 可选的以太网通讯口 · 可选的镜像硬盘的 SCSI 接口 · 通过节点总线转换卡件DNBT(在机柜槽位安装)提供NODEBUS 通讯接口。 · 最多可支持 16 个 WP 作站处理机 · 最多可支持 30 个 CP 或其它 CATEWAY · 运行 HISTORIAN 软件时,可以处理多达 8000 个过程参数的历史数据 · 信息网接口:DECNET,TCP/IP 等。
、操作站处理机 WP 功能: 操作站处理机和与它连接的外部设备一起, 在用户和所有系统功能之间提 供一个界面, 即作为系统站和操作员之间的人机接口。 它用于处理机和其 它系统站接受图形和文本信息并产生视频信号, 在视频监视器上作显示。 操作站处理机设备以包括触摸屏幕, 鼠标或球标, 程师键盘和组合键盘。 提供给系统作为命令和数据输入,")
(2)、操作站处理机 WP 功能: 操作站处理机和与它连接的外部设备一起, 在用户和所有系统功能之间提 供一个界面, 即作为系统站和操作员之间的人机接口。 它用于处理机和其 它系统站接受图形和文本信息并产生视频信号, 在视频监视器上作显示。 操作站处理机设备以包括触摸屏幕, 鼠标或球标, 程师键盘和组合键盘。 提供给系统作为命令和数据输入, 显示选择和报警管理。 操作站处理机 WP 51 技术性能简介 · CPU 为 Micro SPARC Ⅱ RISC 处理机芯片 · 内存 16 MB 可扩展到 128 MB · 内置的 1. 44 MB 软盘驱动器、 硬盘驱动器、磁带机和光驱 · 支持 X-Windows 和 Open Look 功能 · 过程显示画面可从本身硬盘读出, 也可从逻辑上位机 AP 中读出 · 可 选的 Ethernet 接口, 可与 DECnet, TCP/IP, Novell 等网络相连 · CRT - 该设备有带/不带触摸屏二种, 有可选的第二个 CRT。 · 程师键盘 - 类似于标准的计算机键盘, 稍稍作了一点改进。 · 组合键盘 - 又称操作员键盘,每个 CRT 最多可带二个操作员键盘, 每个操作员键 盘由三块告示小键盘或二块告示小键盘加一块数字小键盘组成, 二个操作员 键盘中最多只能有一块数字小键盘, 告示小键盘上有 16 个带发光二极管的按键, 在 作站 处理机软件的控制下按过程的状态呈现发光, 不发光或闪烁发光, 提醒操作员把注意力转向 系统的某些特定区域上去。 每个按键的功能可通过报警组态指定。 操作员键盘上也有报警 确认键和蜂鸣器。 · 并行接口可连接打印机

应用操作站处理机 AW 51 具有应用处理机和操作站处理机的双重功能。 AW 51 主要功能 *应用功能 AW 51 执行与显示、生产控制、 用户 应用程序、 诊断和组态等有关的应用功能。 AW 51 与一个或多个文件存储设备一起使用, 用于对其它站进行装载。 执行生产控制任务, 例如数据认证、 电子表格和性能计算。 提供正常功能, 如操作 员 HELP 和电子文 件。 另外还提供应用开发环境, 如编译软件、 连接软件和文本编辑 软件。 *操作站功能 在视频监视器上, 产生视频信号显示图象和文字信息。 除视频监视器外, 连到 AW 51 的设备可包括触摸屏幕、 鼠标或球标、 一个 程师键盘和一至二个组合键盘。 这些可任 意选择的设备提供作为命令和数据输入, 显示选择和报警管理。

应用处理机 AW 51 技术性能简介 · CPU 为 Micro SPARC Ⅱ RISC 处理机芯片 · 内存 32 MB, 可扩展到 128 MB · 内置的软驱、 硬驱、 光驱和磁带机 · 支持 X-Windows 和 Open Look 功能 · 可选的 Ethernet 接口, 可与 DECnet, TCP/IP, Novell 等网络相连 · 可连接二台 CRT。 · 并行接口可连接打印机或一台 VT 100 终端 · 可 运行历史数据库管理软件和报表软件等应用软件 · 可组态成镜像硬盘 Windows NT 70 系列处理机 福克斯波罗公司与 1996 年正式推出基于 Windows NT 操作系统的 70 系列产品。 该 系列 产品目前有 AW 70 和 WP 70 两种, 其硬件平台是 Intel 公司的 Pentuim 系列。 70 系列与基于 Sun 作站运行 Unix 操作系统的 50 系列在组态软件界面环境等方面 都是相同的。 I/A Series 系统是目前世界上第一个将 Unix 和 Windows NT 结合在一起的 DCS 系统, 它可根据用户的不同要求和操作习惯来选择不同的平台。 应用操作站处理机 AW 70 具有应用处理机和操作站处理机 的双重功能。 即可作为一个应用处理机承担 网络上的服务器功能, 同时又可作为一个人机接口。 它可在中小型系统中充当主站的 角色, 而在大型系统中作为关键处理机。 AW 70 执行与显示、生产控制、 用户应用程序、 诊断和组态等有关的应用功能。 并 具有开发和执行需要扩展的数据处理和文件服务能力的应用功能。
、通讯处理机 COMP 提供了使 I/A Series 的其他站与 VT 100 终端、 打印机以及调制解调器进行通讯。 它四个 RS-423(与 RS-232-C 完全兼容的)串行接口,其异步图象速率为")
(3)、通讯处理机 COMP 提供了使 I/A Series 的其他站与 VT 100 终端、 打印机以及调制解调器进行通讯。 它四个 RS-423(与 RS-232-C 完全兼容的)串行接口,其异步图象速率为 9. 6 Kbps。 可连接 80/132 打印机 (可选中文打印机 )、彩色喷墨打印 机、 VT 100 字符终端、 调制解 调器以及 PC 机等。 通讯处理机给用户提供下列功能: 标准的出错和报警报文打印 · 报表和大批量打印处理 · 报文后备 · 终端用户接口 (4)、 控制处理机 CP 控制处理机是一个可选的容错站, 和与它相连的现场总线组件(FBM)一起, 可按组态好 的控制方案对过程进行控制。 它可实现连续控制、 梯型逻辑控制和顺序控制等功能; 完成数据采集、检测、 报警和传送信息的功能。 CP 对功能块的最快处理周期可组态为 0. 05 秒 (在系统组态时定义)。 它对功能块的扫描 周期可以是 0. 05 ~ 3600 秒, 由功能块的组态参数定义。 这些功能块可任意组合, 实现常规调节控制的功能块有51 种, 包括:输入/输出控制, 信号处理, 计算和转换以及报警和限幅等五大类。 实现梯形逻辑和顺序控制的模块有 6 种。

CP 的负载能力由三个方面决定, 一、 最多挂64个FBM; 二、 最多可装载的功能块数量; 三、 每秒可运行的功能块的数量。 最多可运行功能块的能力与硬件型号、软件版本有关,见下表: 表一: CP 处理能力 硬件型号 软件版本 v. 2. 2 v. 3. 0 v. 4. 0 CP 10 处理能力 150块/秒 300块/秒 CP 30 处理能力 300块/秒 600块/秒 1000块/秒 CP 40 处理能力 2000块/秒 目前在销售的控制处理机技术性能简介 目前在销售的控制处理机 有三种: CP 10、 CP 30 和 CP 40 、 CP 60 , 每种型号的 CP 都 可组态成单机或容错 作方式。 CP 40 技术性能 · CP 40 处理机为 80486 DX 4, 时钟频率 100 MHz · 内存 4 MB · 最多带 64 块 FBM · 最快扫描周期 0. 05 秒 · 每秒最多处理 2000 个控制功能块
 现场总线组件 FBM ,它可连接到系统综合控制软件的控制处理机或 PC 机上。 现场总线组件可与控制处理机或 PC")
现场总线组件 FBM: FBM (Field Bus Module) 现场总线组件 FBM ,它可连接到系统综合控制软件的控制处理机或 PC 机上。 现场总线组件可与控制处理机或 PC 机一起就地按装,也可按装在远程的地方。 现场总线组件与 业现场中通常遇到的各种现场信号是相匹配的。 FBM种类: 现场总线组件,可分为模拟和数字二种信号类型; 每个模拟组件有 8 个输入输出通道, 数字组件为 16 个通道。 数字现场总线组件可执行多种功能, 如事件序列监视、 梯型逻辑控制和脉冲计数, 具体执行 某一种功能由其装载的软件决定。 所有现场信号与控制电子线路隔离, 对模拟量输入/输出信号采用变压器耦合与光电双重隔离, 且每路 A/D 和 D/A 转换独立, 保证故障对系统影响最小。 在大多数情况中, 每一点与其它所 有点是隔离的。 部分数字量输入/输出信号采用成对隔离的方式。 现场总线组件可与 I/A Series 的智能变送器通讯。 可用现场总线组件对现场变送器供电, 省去 了外接配电器的麻烦。

现场总线组件又可分为非扩展主组件、可扩展主组件和扩展组件。 · 非扩展主组件 - 每一非扩展主组件单独与现场总线相连, 具有固定的现场输入 输出通道, 完成这些固有通道所需的信号转换和其他有关的运行功能。 · 可扩展主组件 - 每一可扩展主组件单独与现场总线相连, 完成其固有输入输出 通道所需的信号转换和其他有关的运行功能, 并且在功能上可支持一个扩展组件, 可以选用一个扩展组件增加现场输入输出通道。 · 扩展组件 - 每一扩展组件通过一个可扩展主组件与现场总线相连 , 在功能上依 靠这个支持的主组件完成信号转换和其他有关的运行功能 。 选用扩展组件可以增 加主组件现场信号的输入输出能力。
 电流源旁路插")
所有与现场总线组件之间的通讯是通过一个冗余的现场总线完成的。 现场总线是一种单主站公用线串行数据通讯总线,使用同步通讯规范,遵循 EIA 标准 RS-485。 在每一接线端子电缆部件上的端子接插件安装在现场总线组件的前面,带有整体的状态指示灯、 可替换的字符标志和(当用于 0 至 20 m. A 模拟量输出组件) 电流源旁路插 座。 状态指示灯表示组件的运行状态, 字符标志(即 LETTERBUG)是由用户定义的六位 字符标志作为组件的通讯地址,旁路插座可接受一个从外部电源来的插头, 使得在更 换组件时可以用外部电源驱动组件的输出通道。

表二. 现场总线组件型号汇总表 型 号 说 明 点 FBM 01 0-20 m. A 直流输入 8 模入 FBM 02 热电偶 m. V 输入 8 模入 (1 个补偿信号输入) FBM 03 A 0-320Ω电阻式温度计输入(3线) 8 模入 FBM 03 B 0-320Ω电阻式温度计输入(2线或 4线) 8 模入 FBM 04 0-20 m. A 直流输入/输出 4 模入/4 模出 FBM 05 0-20 m. A 直流输入/输出(冗余) 4 模入/4 模出 FBM 06 脉冲(<=12. 5 k. Hz)输入,0-20 m. A 输出 4 脉冲入/4 模出 FBM 07 A 24-125 V直流输入 16 数入(成对隔离) FBM 07 B 触点直流输入 16 数入(成对隔离) FBM 08 120 V交流输入 16 数入 FBM 09 A 24-125 V直流输入/500 m. A 输出 8 数入/8 数出(成对隔离) FBM 09 B 24-125 V直流输入/10 m. A 输出 8 数入/8 数出(成对隔离) FBM 09 C 触点输入/500 m. A 输出 8 数入/8 数出(成对隔离) FBM 09 D 触点输入/10 m. A 输出 8 数入/8 数出(成对隔离)

机柜: I/A Series 系统具有多种类型的 业机柜,可以安装处理机组件及设备, 现埸总线组件、电源组件, 外接线端子和插座。 所有机柜都 具有通过机柜底部或顶部引入现场和电源接线的通道。 业机柜 32, 是较高的独立的落地安装类型的机柜,具有 32 个槽位, 可安装不 同类型的组件和设备, 该机柜具有安装在侧面的接线端子部件, 同样可通过侧门进 出。 业电源组件: 带隔离变压器的 UPS(不间断供电电源)向 I/A Series 的电源转换 和分配系统提供了优质电源。 I/A Series 的内部供电是通过 IPM( 业电源组件)进 行的。 供电方式分散的好处是: 1、一个电源组件故障不影响全局; 2、散热好; 3、简单、灵活 、安全、质量高。 每个卡件都有主、副 业电源组件供电, 这就是电源的热后备。 两组主供电电源可把电源分配给所有的组件, 这样 一个电源或任何一组件的失效 将不影响节点的运行。 业电源组件具有两种类型,系统电源组件和风扇电源组件。 系统电源组件向所有安装结构组件 (系统组件)提供中间电源。 它们用在所有的 I/A Series 标准机柜里。 系统电源组件具有 60 W 输出, 可向四个安装结构槽位供电。 风扇电源组件可向风扇供电和监视风扇状态 。它们具有 7 W 输出。 系统电源组件和风扇电源组件提供状态灯,来提示供电状态

I/A Series 软件结构 I/A Series 软件是一套完善的软件,它提供用户最优化过程和管理能力, 实际上适合所有的应用场 合。 I/A Series 软件的特点是: · 软件的可移植性 · 可连接性和可户操作性 · 数据访问的安全性. 友好的人机界面 · 开放的开发环境 · 容纳第三方软件能力 操作系统: I/A Series 系统以实时执行程序 VRTX 构成了基本的操作系统。 I/A Series 50系列操作系统是 Sun. Soft Solaris 操作系统。 它是基于 UNIX 系统 V 版本 4 (SVR 4) , 是一种多任务操作系统 ,并支持多种 业标准通讯协议。 同时,Solaris 操作系统是一种 业标准的 X-WINDOW 系统,使用 Open Look 图形用户接口, 可以方便地在整个 I/A Series 系统和所连接的信息网络上访问数据。

编程语言 I/A Series 操作系统支持 C 和 FORTRAN 编程语言, 包括编译程序、 链接程序、 调试程序和语义 检验程序。 C 语言完全支持所有的系统库, FORTRAN 和 C 语言都支持目标管理程序库。 综合控制 I/A Series 系统提供的综合控制组态软件包, 简化了复杂控制策略和安全系统的结构。 I/A Series 综合控制软件提供了连续量、顺序量、梯形逻辑控制,它们可以单独或混合使用从而满 足应用的需要。 过程控制算法的连续量 、顺序量、梯形逻辑主要在与之相连的控制处理机(CP)内进行。 执行各种控制算法的基本单元是功能块(Block), Block 完成控制功能, 它可组织和组态成一 个叫做组合模块( Compound)的组。 Compound 是 Block 逻辑上的集合, 它完成指定的控制任务。 综合控制组态软件可在 Compound 内综合连续量,梯形逻辑和顺序功能, 从而设计出有效的控制方案。 人机接口软件是由实时显示管理程序和一系列有关的子系统和 具组成,它们支持所有与图象显 示和组态 作有关的活动。 人机接口软件也支持终端仿真模式(VT-100 ), 这就使得操作站成为一个程序员终 端, 或者作为 某个安装一些适用 厂/过程管理 具的特殊设备的接口。

组态软件 I/A Series 系统组态软件提供了一系列不同的组态程序。 如系统组态程序,允许用户定义系统网络、 设备、 软件和包装的布置; 控制组态程序, 能够将静态的显示画面转换成与过程有交互作用的动态显示画面, 并提供逻辑 上分层控制能力; 以及应用程序组态程序等等, 这些组态软件可在 PC 机上运行。 I/A Series 系统的控制模块中具有多种报警功能, 如:测量值越限报警,偏差越限报 警, 输出越 限报警,变化速率报警, 过程状态报警,输入/输出通道故障报警等。 当报警状态发生被确认以后, 参数连续变化,可作出再报警。可任意组态报警功能,报警的限值, 报警作用的不灵敏区,报警的 优先级别,报警时报警信息要输往的设备。 过程报警可以被指定为 1~5 级不等的报警优先级, 优先 级高低不同时, 可作出不同的报警处理。 历史数据库管理软件采集、存储、处 理和归档来自控制系统的过程数据, 为趋势显 示、 统计过 程控制 (SPC) 图表、记录、报表、电子表格和应用程序提供数据。 该软件为过程 程师和操作员提 供了广泛的数据采集、管理和显示功能。 历史数据库管理软件采集四种类型的数据 : · 采样 · 浓缩处理 · 信息 · 人 数据输入(MDE)值 对于每个采样点,其采样值可保留在独立的文件中。 I/A Series 50 系列 AP / WP 可以对多达 8000 个过程参数作历史数据采集。 采样的周期可 以组态为 2、4、10、20 和 30 秒,1、2、5 和 10 分。每个采样点最多可保存 99, 999, 000 条记 录。

操作员操作记录功能 操作员的下述操作可以被记录下来 : · 更改回路的 作状态和参数,如手动/ 自动,本地 /远程给定, 更改 P, I,D 参数值, 更改输出值等 · 更改使用环境,如从操作员进入到 程师环境 · 进入软件组态环境,如进入到控制组态,绘图环境 · 操作所在的操作站名 · 操作所进行的时间 操作员的操作记录可以被立即直接记录在打印机上,存储在历史数据库中,供以后读 出。存储 在 历史数据库中的操作员操作记录可以按要求打印出来。 操作安全措施 在 I/A Series 系统范围内,“环境” 是特定用户观察所连接的系统和过程的窗口。 特定的环 境可以与一个用户或一组用户有关, 或者专属于给定的操作站, 这是访问和处理系统信息安全性的 第一级。 改变菜单中的输入登记项从而提供了安全性的第二级 , 而安全的第三级是限制操作显示 画面内某些目标。 在 I/A Series 系统中,通过口令(Password )来限制访问环境。 根据不同用户的权限, 来设 置不同的运行环境。 FOXBORO 提供了一套标准的环境设置, 供组态中修改。

第二章 操作系统 I/A’s 的操作系统目前在使用的有三个版本: PW 与 AP 20 上的 VENIX; 50系列上的 Sun. OS TM 5. 2 ( Solaris ® 2. 2) ; 70 系列上的 Windows-NT 4. 0。 福克斯波罗公司不久将推出带有双操作平台的 60 系列。 · Windows-NT 的操作界面与一般 PC 机无异, 故我们这里不再作介绍。 · VENIX 是以分时的 Unix 操作系统为基础,加上实时控制部分 VRTX, 以 Bourne Shell 为主, 融入部分 C Shel 指令。VENIX 操作系统与 UNIX 操作系统第七版完全兼容,在 UNIX 操作系统上开 发的软件可以不加修改地在 VENIX 系统中运行。在 VENIX 系统中可以运用 C 程序设计语言和 FORTRAN 程序设计语言。 · 50系列 Sun 作站上使用的 Sun. OS TM 5. 2 是 Sun 公司具有自主版权的 Unix 操作系统。 操 作人员可以根据自己的爱好选用 Bourne Shell 或 C Shel 1 UNIX 操作系统简介 UNIX 系统是一种多用户,多任务的操作系统。多用户指允许多个用户同时进入系统进行操作, 对 每个用户来讲机器就好象仅在为他一个人服务。多任务指多道进程可同时运行。作为多用户操作系统, Unix 的安全性和可靠性都要胜于一般的系统。 多个用户可以通过不同的访问权限进入系统,他们是通过超级用户来分配权限,以此来提高操作 系统的安全可靠性。

1. 1 UNIX 操作系统的进入与退出 方法一. 在 I/A 的 程师环境下依次选择 Sft. Mnt → VT 100 (50 系列 VT 100 有 local; remote; host 之分) 以 作站作为仿真终端, 当出现 "#" 字号提示符即可输入 Unix 命令。 退出 VT 100 的命令是: exit 或 Ctrl-d。 方法二. 用关机步骤进入单用户状态, 在 I/A 的 程师环境下依次选择: Sft. Mnt → PW_Shutdown → SHUTDOWN(50 系列上是 AW 或 AP_Shutdown) 最后的一个 SHUTDOWN 是误操作保护, 如果并不想关机可选 CANCEL。 在 AW/WP 选择 SHUTDOWN 后出现以下信息: The system is down Changing to init state S – please wait INIT: New run level : S INIT: SINGLE USER MODE Type Ctrl-d to proceed with normal startup (or give root password for system maintenance): _ 机器在这里停下, 按照提示可以同时按下 Ctrl 和 d 二键重新启动或输入口令进入系统维护, 可做 备份或恢复文件 作。 输入口令后出现以下信息: Enter System Maintenance Mode # 井字提示符出现后, 可以输入 UNIX 命令。 进入这种状态, 主要是做硬盘维护 作。 作完成 后, 如要启动 I/A, 可输入命令 reboot

如要关机, 可输入命令 poweroff, 系统将自动切断电源。 这种用软件命令断电的方法, 在按下 程师键盘上的开机按钮后即可启动, 因此为安全起见, 如要搬动、 拆装机器, 务必关掉机器上的 硬开关。 最好安下面的步骤执行。 在井字提示符后面输入命令 halt syncing file systems … [1] done Program terminated Type help for more information OK 现在可以断电了。 如要启动 I/A, 输入命令 boot↙ 在 OK 提示符下软断电命令为 power-off 常用命令介绍 Unix 系统区分大小写, 不能混用。 Unix 命令的一般格式: 命令 [-选项] [参数]↙ 回车符“↙”表示该命令行在前台执行; 也可用“&↙”表示将命令送入后台执行,这时机器将显示一个进程号,然后换行出现输入命令的提 示符,前台运行的命令可以用“Λc”中止,后台进程要用命令“kill 进程号”中止; 方括号表示这一项可选, 实际使用时不要加方括号。 通配符: * 代表任意的字符串。 ? 代表任何一个字符。 [A-z] 从 A – z 的所有字母
![ls [-option] [fname] 列目录清单。option是该命令的选择项, fname 是文件名参数。 例. ls -a 以长格式列目录清单, 包括以点 ". " 带头的隐含文件。短横表示其后是选择项。若无短横](https://present5.com/presentation/eb6c6adefb6203071f5be3f4a4b99871/image-32.jpg "ls [-option] [fname] 列目录清单。option是该命令的选择项, fname 是文件名参数。 例. ls -a 以长格式列目录清单, 包括以点 \". \" 带头的隐含文件。短横表示其后是选择项。若无短横")
ls [-option] [fname] 列目录清单。option是该命令的选择项, fname 是文件名参数。 例. ls -a 以长格式列目录清单, 包括以点 ". " 带头的隐含文件。短横表示其后是选择项。若无短横 shell 解释 "a" 为文件名, 就列出当前路径下文件名为 "a" 的文件。 例. ls a* 列出所有文件名的第一个字母为 "a" 的文件。如果该文件是个目录则列出其下面的所有文件。 例. ls [a-g]* 列出所有文件名的第一个字母为 "a" 到 "g" 的文件。如果该文件是个目录则列出其下面的所有文件。 cd [dname] 改变当前的 作目录 例. cd /usr/fox/hstorian/bin 将目录转到历史库的位置。 例. cd 将目录转到本用户注册登记的目录 (即 HOME 目录)。 mkdir dname 创建 dname 目录。 rmdir dname 删除 dname 目录, 该目录必须是空目录, 没有任何文件。 pwd 显示当前目录的全路径名。 mv fname 1 fname 2 将 "文件 1" 移到(即改名为) "文件 2", 文件名可以是一个全路径的文件名, 下面凡是写文件名的地方都可以是全路径的。 例. mv aa. arc /usr/fox/hstorian/bin/tank_rep. arc 将 "aa. arc" 文件转移到历史库所在的目录下并改名为 "tank_rep. arc"

cp fname 1 fname 2 拷贝 "文件 1" 到 "文件 2” 。 rm fname 删除指定的文件。 在用通配符时要小心, 不要把不想删除的文件删掉了。 find dir-list bool-exp 查找文件。 find /usr -name fname -print 在 /usr 目录下,按文件名查找,找到即逻辑为真,就在屏幕上打印 输出文件的全路径名。 find /usr -type c -print 在 /usr 目录下,按文件类型查找,找到即逻辑为真,就在屏幕上打印输 出文件的全路径名。 其中 c 可以是 f 一般文件 b 块设备文件 c 字符设备文件 d 目录 p 管道 passwd 改变口令。 用此命令修改口令, 并经常改变口令。 tar tvf /dev/fh 0 列出 fh 0 设备(即软盘)中的目录。 50 系列上软盘的设备名是 rfd 0。 tar xvf /dev/fh 0 把软盘中的文件按原目录复制到操作系统中。 tar cvf /dev/fh 0 /usr/guest 把 "/usr/guest" 目录下的文件存入软盘, 并把软盘中原有的文件全冲掉。 tar rvf /dev/fh 0 /usr/guest 把 "/usr/guest" 目录下的文件存入软盘, 软盘中原有的文件仍保留。 在 50 系列上软盘格式化命令是 fdformat,该命令可以有其它选项,主要有: -l 低密度(720 K)磁盘 -d MS-dos 格式化

全屏幕文本编辑命令 vi 在 UNIX 操作系统中有好几种编辑方法, 如 ed, vi,作为一个熟练的 UNIX 管理维护人员应该学会 vi。 毕竟 vi 并不方便, 因此在介绍了 vi 之后, 我们再介绍一个 SUN Solaris 版本提供的一种文本编 辑 具。 命令格式: vi fnames 在 vi 编辑方式下有二种状态: 命令状态, 和文本插入状态。在启动了vi后, 首先进入的是命令状态, 这时打入的任何字符都作为编辑命令处理。i, a, o, O 这几个命令可进入文本插入状态, 在文本插入状态 下打入的任何字符都作为文本输入到编辑缓冲器中。Esc 键从文件状态退回命令状态。 i, I, a, o, O vi —→ 命令状态 ←——————→ 文本插入状态 Esc 在命令状态下打入大写字母 ZZ 就将编辑缓冲器中的文本存盘并退出 vi。 vi 的编辑命令相当丰富, 且在 vi 编辑中还可使用其他编辑方法 (如 ed) 的命令, 我们只讲主要的一 些命令。 插入命令: i 进入插入状态, 在光标前插入文本。 I 将光标移到本行的第一个字符前, 并进入插入状态。 a 进入插入状态, 在光标后插入文本。 o 进入插入状态, 在光标下开一新行。 O 进入插入状态, 在光标上开一新行。 翻屏命令: Ctrl-d 向下卷半屏。 Ctrl-u 向上卷半屏。 Ctrl-f 向下卷一屏。 Ctrl-b 向上卷一屏。
 : q 文件未作修改,")
上面已讲过大写 ZZ 命令存盘。如果对一文本修改过以后不打算存盘或原先的和修改过的文本都想 保存, 可用下面的命令: (其中冒号是告诉 vi 编辑器,要使用 ed 编辑命令,这时光标跳到屏幕的最底 下一行。) : q 文件未作修改, 退出编辑。 : q! 放弃已作修改的文件, 不存盘退出编辑。 : w [fname 2] 将编辑缓冲器里的文件写入文件 fname 2, 缺省的写入原编辑的文件 fname。 如果你偶尔使用文本编辑, 那 vi 是太繁了, 我们介绍一个 Solaris 版本提供的编辑 具, 它的界 面与 Windowns 的“记事本” 太相似了, 看到它以后你一定会用的。 进入这个 “记事本” 的方法如下: 进入 VT 100 后, 按鼠标右键出现一个快速菜单, 用左键选中 Enable Scrolling, 这时VT 100窗口 右边出现屏幕滚动条, 再按鼠标右键从快速菜单中用左键依次选中 File Editor → Enable, 这时 VT 100 窗口会一分为二, 上半部仍可使用 UNIX 指令, 下半部为文本编辑窗口。 它与 Windows 的“ 记事本”一样, 有四个菜单, 分别为 File, View, Edit, Find。 如要关闭这个编辑窗口, 可按鼠标右键从快速菜单中用左键依次选中 File Editor → Disable。 文件管理程序 有二种办法可作文件管理, 一种是用 Unix 命令, 这必须知道命令的格式和语法。文件管理程序以 菜单的形式为用户提供了一个非常友好的界面, 不需要记任何命令就能操作管理文件。 (对于 Windows 平台的用户, My-Computer 和 File-Manage 都应该是很熟悉的,我们就不再介绍) 启动文件管理程序: 在过程 程师环境下顺序选择 Config → File_Utilities

Source Destination DISK /usr/dispgrp DISK /usr/menus/d 2 FILE tank_d FILE Action List FILE Copy to Destination filter * Move to Destination Rename as Send to Printer Format Floppy Append to Floppy Load from Floppy Copy: Host/Remote Copy: Remote/Host Copy: Remote/Remote Delete: Host Delete: Remote EXECUTE CLOSE

菜单: Copy to Destination Move to Destination Rename as Send to Printer Format Floppy Store on Floppy Load from Floppy Append to Floppy Copy: Host/Remote Copy: Remote/Host Copy: Remote/Remote Delete: Host Delete: Remote Source Destination 拷贝文件,在本机这个硬盘上拷贝 转移文件 文件改名 打印文件 格式化软盘 从硬盘拷贝到软盘, 软盘上原有文件被清除 从软盘拷贝到硬盘 从硬盘拷贝到软盘, 软盘上原有文件仍保留 从本地硬盘拷贝到网络上的另一硬盘 从网络上的另一硬盘拷贝到本地硬盘 在网络上的非本地二个硬盘之间拷贝文件 删除本地硬盘上的文件 删除网络中其他硬盘上的文件 文件的源 文件的目的地 按键: DISK 显示当前路径下的目录清单 FILE 显示当前路径下的文件名清单 EXECUTE 执行选定的操作 CLOSE 退出文件管理程序

操作步骤: 一. 从菜单中挑选要执行功能。 二. 若出现文件的源或目的地, 则一定要填入。可以用键盘输入,也可以选用 DISK、FILE 列出目 录和文件名清单, 用鼠标键点取。 三. 选择 EXECUTE执行指定的功能。 例. 在本地的硬盘上拷贝文件 从菜单中选择 Copy to Destination 在源和目的地文件下面都出现了DISK 和 FILE, 可在它们后面直接打入路径和文件名; 也可用鼠标 敲击DISK, 让系统列出目录表然后从目录表中选, 路径指定好以后再敲击 FILE 列出文件名表。 源和目的地都填好后, 用鼠标选中 EXECUTE, 敲击一下文件即被拷贝。 例. 删除本地的文件 从菜单中选择 Delete: Host 在源文件下面出现了 DISK 和 FILE, 按上述相同的方法填好文件名。 源和目的地都填好后, 用鼠标选中 EXECUTE 敲击一下文件即被删除。

第三章 控制组态 在我们把 I/A’s 系统软硬件到位安装好以后,要做的 作就是把控制方案组态到机器里, 这样就 可以开车了。 I/A’s 提供了一些缺省的显示操作方法。 由于 I/A’s 的开放性, 我们不一定要等设备到货后才做这项 作, 只要有一台装入了 PW-C 软件 的个人计算机就可以把所有的组态 作做好。 在这一章我们主要学习如何使用 CIO 组态器,以及 Compound、Block 的基本概念和一些重要的模 块参数. IOM_ID = AIO 001 PNT_NO = 4 AIN PID FBM 04 AIO 001 1 2 3 4 5 6 7 8 AOUT IOM_ID = AIO 0001 PNT_NO = 8 图 3-1 水塔液位控制
和模块(Block)的概念 图 3-1 构筑了一个液位控制回路,现场测量信号通过 FBM 的第四通道接到模拟信号 输入模块 AIN,将其转换成数字量交 PID 模块处理,PID 模块按控制要求计算阀门的开 度,最后由")
1. 组合模块(Compound)和模块(Block)的概念 图 3-1 构筑了一个液位控制回路,现场测量信号通过 FBM 的第四通道接到模拟信号 输入模块 AIN,将其转换成数字量交 PID 模块处理,PID 模块按控制要求计算阀门的开 度,最后由 AOUT 模块将控制阀门开度的数字量转换成模拟信号再通过 FBM 的第八通 道送到现场。其中 AIO 001 是 FBM 的通讯地址 (letterbug)。在这样一个简单的控制回路 中就用到了 AIN、PID 和 AOUT 三个模块,而且这三个模块在回路中有密切的关系,我 们通常把相互有联系的模块放在一个集合中,并把这个集合称为 Compound 组合模块( 或功能块组合)。 控制回路由控制处理机中的组合模块和模块(或功能块)构成。组合模块是实现控制 方案的模块的逻辑集合。模块是为实现某个控制任务的一组算法。图 3-2 表示组合模 块与模块的关系。组合模块提供了 I/A 系统集成控制(连续控制、梯形逻辑控制、顺序 控制)的基础。 I/A 系统中的任一组合模块中的任一模块可以连接到另一个组合模块中 的任何一个模块。 模块含有决定模块性能的参数,参数值的类型有实型(Real)、布尔 型(Boolean)、整形(Integer)和字符串型(String)。
和模块(Block)的功能 组合模块(又称功能块组合)对它属下的模块提供下列功能: 按照报警优先级对过程报警 进行屏蔽,对报警设备进行分组,指示当前报警的最高级别。 下面列出控制处理机集成控制软件按功能定义的模块类型及其基本功能。至于详细的用法 和参数请参考资料 B 0193 AX《I/A Series Integrated Control Block")
2. 组合模块(Compound)和模块(Block)的功能 组合模块(又称功能块组合)对它属下的模块提供下列功能: 按照报警优先级对过程报警 进行屏蔽,对报警设备进行分组,指示当前报警的最高级别。 下面列出控制处理机集成控制软件按功能定义的模块类型及其基本功能。至于详细的用法 和参数请参考资料 B 0193 AX《I/A Series Integrated Control Block Descriptions》。 ACCUM (Accumulator) 积算模块 ACCUM 积算模块用于计算模拟型输入信号(流量或脉冲数)的累计值,通常用作流量积 算,用户可以清除、预设或保持模块的输出,积算模块可以串接起来使用。 AIN (Analog Input) 模拟信号输入模块 AIN 模拟信号输入模块用于处理从模拟量输入类型的现场总线组件 (FBM) 或 (FBC) 来的单 点输入信号,也可接受其它模块的信号。它同时提供输入信号的修正、滤波、输出保持上次正 常值、标度输出到所要求的 程单位、输入通道故障报警、超量程报警以及高、低绝对值报警。 AINR (Redundant Analog Input) 冗余的模拟信号输入模块 AINR 模拟信号输入模块用于处理从冗余的模拟量输入类型的现场总线组件 (FBMs)或 (FBCs) 来的单点输入信号,也可接受二个其它模块的信号。其它功能与 AIN 模块相同。 ALMPRI (Alarm Priority Change) 报警优先级更改模块可以动态地更改某个模块的报警点的优先级使得该报警点的报警优先 级随过程的 况而改变。 它有 5 个布尔输入 PR_INj ( j=1~5 ) 第 j 个为“ 1”时, 就将第 j 级 优先级从 PRIOUT 输出。 当 PR_INi 与 PR_INj (i<j)的输入同时为“ 1”时,PRIOUT=i 。
")
图 3-2 Compound 和 Block 的关系(虚线内表示 CP)
 模拟信号输出模块将一个单点模拟输出信号送往模拟量输出类型的现场总线组件的某个 通道,它同时提供带偏置的手/自动功能,输出信号限制以及输出通道故障报警。 AOUTR (Redundant Analog Output) 冗余的模拟信号输出模块 其功能与 AOUT 模块基本相同。 BIAS")
AOUT (Analog Output) 模拟信号输出模块将一个单点模拟输出信号送往模拟量输出类型的现场总线组件的某个 通道,它同时提供带偏置的手/自动功能,输出信号限制以及输出通道故障报警。 AOUTR (Redundant Analog Output) 冗余的模拟信号输出模块 其功能与 AOUT 模块基本相同。 BIAS (Bias) 偏置模块的输出测量值 (MEAS) 和偏置值 (BIAS) 之和。这两个输入可以分别进行标度。 同时,模块提供测量值报警。但它不提供输出报警。 BLNALM (Boolean Alarm) 布尔 (开关/逻辑状态) 报警模块 本模块可对 8 个布尔输入 IN_j (开关/逻辑状态) 进行监视,可对每一个布尔输入进行翻转 IV 0_j, 并定义该点的报警名 ANM_j, 以及逻辑“ 0”状态的报警信息和逻辑“ 1”状态的复原信 息。 BOOL (Boolean Variable) 布尔变量模块 本模块用来存储用户程序的布尔变量给其它控制模块使用,在组态时要把它插入在“END DATA”之前,不计模块个数,因为它不在 Compound 中运行,所以也没有周期和相位这二 个参数。与其同一性质的模块还有:LONG、REAL 和 STRING。 CALC (Calculator) 计算模块提供 50 步顺序执行的算术和逻辑运算,它能满足其它模块不易实现的特殊控制 要求。模块有 8 个实型输入,16 个布尔型输入,2 个整形输入,2 个长整形输入,4 个实型 输出,8 个布尔型输出,6 个整形输出,2 个长整形输出,24 个中间存储器。 CALCA (Advanced Calculator) 高级计算模块的功能与计算模块基本相同,用计算模块编写的程序不需修改就可以直接 在本模块中运行。 其不同点是; 本模块提供了双操作数的算术和逻辑运算指令, 使程序可 以缩短到用 CALC 编写程序的三分之一。 有一点要注意, 本模块不提供输出限位功能, 实 际上本模块的实型、 整型量输入输出参数没有量程的概念, 而 CALC 有这个功能。
 非线性函数模块 本模块提供了对非线性函数用分段线性化来近似模拟的功能。可定义最多 20 段折 线来模拟一条曲线,模块的输出根据输入 (MEAS) 和用户所定义的多段折线产生。 本 模块也可作为 AIN 模块的扩展模块为多个 AIN")
CHARC (Characterizer) 非线性函数模块 本模块提供了对非线性函数用分段线性化来近似模拟的功能。可定义最多 20 段折 线来模拟一条曲线,模块的输出根据输入 (MEAS) 和用户所定义的多段折线产生。 本 模块也可作为 AIN 模块的扩展模块为多个 AIN 模块提供分段线性化功能, 这时本模 块的位置必须在主模块(AIN)之前, 并且 EXTOPT 参数取“ 1”(或“ 2”, 用于热电 偶)。 在 AIN 模块的 EXTBLK 上填入 Comp名:CHARC块名. BLKSTA。 CIN (Contact Input) 开关信号输入模块 对来自数字型 FBM、FBC (现场总线组件) 的一个单点的开关接点提供送往 CP 的 一个接口,同时提供输入反相、输入接点状态报警和输入通道故障报警。 COUT (Contact Out) 开关信号输出模块 本模块为其它模块输出的开关/逻辑信号送往数字型 FBM 组件输出提供一个接口, 输出可以是静态的开/关式或脉冲式,用户可以定义脉冲宽度。 DEP (Dependent Sequence) 非独立顺序模块 本模块提供顺序控制,可用来访问任何组合模块或模块的参数,也可用来激活其它 顺序模块和监视模块 (MON),控制定时模块 (TIM) 中的定时器,以及发送信息到打印 机,显示画面或历史数据库。当同一组合模块中的例外型顺序模块 (EXC) 被激活时, DEP 模块自动暂停执行。 DGAP (Differential Gap) 二位间隙式控制模块 本模块以测量值偏离设定值超过所设置的间隙( GAP ), 调整二个开关型的输出 OUTINC 和 OUTDEC 来控制开关阀或其它离散型设备, 模块有二位二态和二位三态 两种 作方式。 DPIDA (Distributed PIDA Controller) 分布式 PIDA 控制模块 本模块的功能与 PIDA 相同,它可以装入现场总线组件 (FBM 04、FBM 17、FBM 22) 中运行,从而提高了运行的速度。 运行周期 10~ 15 ms 可组态, 独立于 CP 周期, ECB 52 提供了组态接口。
 显示站接口模块 用来连接设备控制模块 (ECB 14),提供面板显示站与 Compound/Block 之间的接口。 DTIME (Dead Time Compensator)")
DSI (Display Station Interface) 显示站接口模块 用来连接设备控制模块 (ECB 14),提供面板显示站与 Compound/Block 之间的接口。 DTIME (Dead Time Compensator) 纯滞后补偿模块 本模块的输出比输入滞后一定的时间,它主要用于补偿过程控制中的纯滞后作用。 ECB (Equipment Control Blocks) 设备控制模块 本模块在 FBM 中运行,它是 FBM 与 CP 的接口软件。 EVENT (Event) 事件顺序报警模块 本模块对在一个接点输入 FBM 中检测到的 32 个接点状态变化 (事件) 提供带时间标 签的报警信息, 它将检测到的状态变化保存在循环队列中。 同时提供 32 个开关型输 出。 EXC (Exception Sequence) 例外型顺序模块 其功能与独立型顺序模块 (IND) 和非独立顺序模块 (DEP) 类似,当它运行时会停止 同一 Compound 中非独立顺序模块的运行,通常用于对非正常 况的校正作用。 FBTUNE (Feedback Self-Tuner) 反馈自整定模块 本模块作为 PIDA 的辅助模块,用于 PIDA 模块的反馈自整定。 使用时 PIDA 的 MODOPT 参数置 5, 在 FBTUNE/FFTUNE 模块的 PIDBLK 参数上填入 PIDA 块的 BLKSTA 参数。 FFTUNE (Feed forward Self-Tuner) 前馈自整定模块 本模块与上一模块一样是 PIDA 的辅助模块,区别仅在于它是前馈自整定。 GDEV (General Device) 通用设备控制模块 提供对马达和空气开关阀的开/关控制和对 2 线或 3 线马达电路的运行/停止控制。 IND (Independent Sequence) 独立型顺序模块 本模块功能与非独立、例外顺序模块类似,但它的运行不影响别的顺序模块的运行, 也不受其它顺序模块运行的影响。
 位置和速率限制模块 本模块对一个实型输入信号进行高/低限位(HOLIM/LLIM),以及对输入信号的变 化速率(ROCOPT/ROCLIM)进行限制。 LLAG (Lead-Lag) 超前/滞后动态补偿模块 对输入信号的变化, 用输出动态的超前/滞后于输入来进行动态补偿。 模块可 作 于超前/滞后方式或脉冲方式。 当")
LIM (Limiter) 位置和速率限制模块 本模块对一个实型输入信号进行高/低限位(HOLIM/LLIM),以及对输入信号的变 化速率(ROCOPT/ROCLIM)进行限制。 LLAG (Lead-Lag) 超前/滞后动态补偿模块 对输入信号的变化, 用输出动态的超前/滞后于输入来进行动态补偿。 模块可 作 于超前/滞后方式或脉冲方式。 当 作于超前/滞后方式时, 模块输出的稳态值为输入信 号的稳态值加上偏置值, 在脉冲 作方式时, 输出的稳态值仅取决于模块的偏置参数 (BIAS) 值。 LOGIC (Logic) 逻辑运算模块 本模块具有逻辑运算和计时功能,除了算术运行外可以完全替代 CALC 模块,但其 编程最多只有 15 步,参数也少很多。有 2 个实型输入,16 个布尔型输入,1 个长整型 输入,4 个布尔型输出,1 个长整型输出, 5 个中间存储器。 LONG (Long Integer Variable) 长整型变量模块 本模块与 BOOL 模块一样,为用户提供了自己开发的应用程序与 I/A 控制模块之间 的接口。 MAIN (Multiple Analog Input) 多点模拟信号输入模块 本模块功能与 AIN 模块相同,只是 AIN 是单点输入,而 MAIN 最多可处理同一个模 拟型 FBM 上输入的 8 点模拟输入信号作标度转换、数字滤波以及热电偶冷端补偿等。 MATH (Mathematics) 数学运算模块 本模块用于数学运算,除了没有布尔运算功能,其它功能与 CALCA 几乎相同。可 以说 MATH 与 LOGIC 模块是 CALCA 的子模块。其意义在于这二个模块比较 CALC、 CALCA 来讲更短,运行速度更快。下面我们把这四个模块的性能作一比较: MCIN (Multiple Contact Input) 多点开关信号输入模块 本模块最多可处理一组 32 个开关逻辑输入信号,主要用于对来自同一个数字型 FBM 的输入信号进行处理,功能与 CIN 相同。
 多点开关信号输出模块 本模块最多可将 16 个开关逻辑信号送往同一个数字型 FBM。功能与 COUT 相同。 MDACT (Motor Driven")
MCOUT (Multiple Contact Output) 多点开关信号输出模块 本模块最多可将 16 个开关逻辑信号送往同一个数字型 FBM。功能与 COUT 相同。 MDACT (Motor Driven Actuator Controller) 马达驱动机构控制器 模块与 FBM 17 中的 ECB 模块关联,提供两种不同的算法, 有 Raise/Lower/Off 三态。当使用 ECB 34,执行反馈滞后算法,如同 PI 控制 器;使用 ECB 36,提供脉冲宽度调制。 MEALM (Measurement Alarm) 测量值报警模块 本模块提供三种类型的报警:高/低报警、高高/低低报警、速率报警。 主要用于外部来源的报警,如 HTG、Windows 类型的 ECB, 其它无报警 功能的模块,如顺序模块, 也可用本模块报警。 对内部其它模块的报警 可用 REALM 模块。 MON (Monitor) 监视模块 本模块用于对过程状态或条件进行监视。 本模块可包含 16 个用户定义 的过程状态或条件,当这种过程状态或条件达到或相符时, 模块输出相应 的信号或激活其它顺序模块 (EXC、IND、DEP 或 MON) 的执行。 MOVLV (Motor-Operated-Valve) 电动阀控制输出模块 本模块将二路脉冲输出信号送往同一个数字输出型 FBM 的两个相关接 点以增量的方式来操纵电动阀的开、关、 停并可以根据阀门的限位开关 的反馈信号作出阀位“不匹配”报警,可组态输出脉冲宽度。 MSG (Message Generator) 信息发生模块 模块有八个布尔量输入,当输入值发生 0 变 1,或 1 变 0 的变化时, 就送出一个“状态改变”信息。 当然如果组态时未输入“状态改变”文本,则 它也就无法送出信息。
 马达控制输出模块 本模块通过数字输出型 FBM 的一个或两个接点输出,来控制马达的起动/停止。当 作 于二线方式时,模块输出一个通/断信号来控制马达的起停,类似于 VLV 模块。当 作于三 线方式时,模块输出二个脉冲信号来控制马达的起停,类似于 MOVLV")
MTR (Motor Controller) 马达控制输出模块 本模块通过数字输出型 FBM 的一个或两个接点输出,来控制马达的起动/停止。当 作 于二线方式时,模块输出一个通/断信号来控制马达的起停,类似于 VLV 模块。当 作于三 线方式时,模块输出二个脉冲信号来控制马达的起停,类似于 MOVLV 模块。模块还可以 根据马达的转/停感应开关送回的反馈信号作出马达动作“不匹配”报警。 OUTSEL (Output Select) 输出选择模块 本模块可在二个输入信号中作出高选或低选,从功能上讲它与信号切换模块 SWCH 几乎完全 相同,不同点是它有二个反演算值。图 3-3 是它的控制算法图解。 PATALM (Pattern Alarm) 码型报警模块 本模块可对 16 位开关、状态、逻辑输入信号所组成的二进制数码与所定义的 16 位码型进行 比较,作出码型相符报警并输出码型相符信号,对不要求比较的位可以进行屏蔽。 PID (Proportional, Integral, Derivative) 比例-积分-微分控制模块 本模块执行传统的 PID 调节功能,可组态成纯比例(PO)、纯积分(IO)、比例加微分( PD)、比例加积分(PI)和比例加积分加微分(PID)五种 作方式。 具有手/自动控制,手/自 动锁定、本地/远方控制及锁定、外部积分反馈, 防止闭环运行时积分饱和、 模块的无扰动切换 到自动、输出偏置、输出嵌位、 设定值跟踪、自动进行串接处理等功能。 用于串接回路时, 对 上游模块的反演算输出提供了串接操作的无扰动切换。 PIDA (Additive PID) 带附加功能的 PID 模块 本模块在常规的 PID 模块功能上,可以附加 FBTUNE 或 FFTUNE 模块,执行反馈自整定或 前馈自整定控制。 PIDE (PID with EXACT) 带自整定功能的 PID 控制模块 本模块在常规的 PID 模块功能上增加了 P、I、D 参数的自整定功能,模块可以处于手 整定、 预整定和自整定三种不同的 作方式。
 带扩展功能的 PID 控制模块 本模块在常规的 PID 模块功能上增加了非线性增益补偿、采样 作方式、批量控制以 及输出跟踪的功能(TRACK 被跟踪的输入, TRKENL 是否要跟踪)。")
PIDX (PID Extended) 带扩展功能的 PID 控制模块 本模块在常规的 PID 模块功能上增加了非线性增益补偿、采样 作方式、批量控制以 及输出跟踪的功能(TRACK 被跟踪的输入, TRKENL 是否要跟踪)。 PIDXE (PID Extended with EXACT ) 带扩展功能的 PID 参数自整定控制模块 本模块在常规的 PID 模块功能上,同时增加了 P、I、D 参数自整定和非线性增益补偿、 采样 作方式、批量控制以及输出跟踪的功能。 PLB (Programmable Logic Block) 可编程逻辑控制模块 本模块支持在数字型 FBM 中执行的梯形逻辑以实现逻辑控制, PLB 模块是对应的 FBM 中运行的梯形逻辑与其它模块之间交换数据的接口。 PTC (Proportional Time Controller) 比例型时间宽度控制模块 本模块有二个脉冲型的输出, 输出脉冲在所设置的控制周期中占空比与测量输入信号 和设定值的偏差及比例带参数的设置值成比例关系, 实现比例-时间型的开关调节器的 功能。 RAMP (Ramp) 斜坡信号发生模块 本模块是一个斜坡信号发生器, 其输出为一斜坡信号, 在模块中可设置斜坡输出的方 向和速率,模块也可以控制其输出处于保持或跟随某一输入信号。 模块同时具有输出高/低 限幅功能。 RATIO (Ratio) 比值模块 本模块用于比值控制, 模块的输出是输入的测量值与设定的比例值的乘积并加以标度转 换。 REAL (Real Variable) 实变量模块 除变量的类型不同,与布尔变量模块属于同一种类, 请参数 BOOL 模块的说明。
 模块信号报警模块 本模块可对一个模拟输入信号作绝对值高/低报警、变化速率报警、 与设定值的正/负偏差 报警。 对每种类型报警提供逻辑输出信号并生成报警和返回信息。 SIGSEL (Signal Selector) 信号选择模块 本模块根据用户的选择对多达 8")
REALM (Real Alarm) 模块信号报警模块 本模块可对一个模拟输入信号作绝对值高/低报警、变化速率报警、 与设定值的正/负偏差 报警。 对每种类型报警提供逻辑输出信号并生成报警和返回信息。 SIGSEL (Signal Selector) 信号选择模块 本模块根据用户的选择对多达 8 个模拟输入信号作高选、低选、中选或求平均值, 将所 选择的结果输出,并指出被选中的输入信号(除求平均值外), 可将几个信号选择模块串接 起来以实现多于 8 个输入信号的选择。 STALM (State Alarm) 状态报警模块 本模块与 MEALM 模块类似,只是本模块是为布尔型的输入值报警。 STATE (State) 状态模块 本模块可组态 16 个标准码、1 个保持码和 1 个初始化码, 每个码可有最多 16 位的布尔值。 模块 作在状态模式时, 按驱动输入的要求输出所要的码;在步进模式时, 如果驱动输入 为“真”将标准码顺序输出。 STRING (String Variable) 字符串变量模块 本模块的功能与 LONG、REAL 模块一样,仅仅是变量的类型不同。 SWCH (Switch Position Selector) 信号切换模块 本模块模拟单刀双掷开关的功能,根据控制输入端的状态,选择二个独立输入信号中的一 个作为输出信号。在信号切换时,输出可从当前值按指定的平衡时间,平滑地过渡到新的输 出值上。 TIM (Timer) 定时控制模块 一个定时控制模块含有四个独立的定时器,每个定时器均可被设置初值,可被其它模块激 活进行计时,当定时器的计时值由负转为正时,对应该定时器的状态输出由逻辑“ 0”变为逻 辑“ 1”,可用作定时控制。 VLV (On-Off Value Control) 开关阀控制模块 本模块的输出信号通过数字型 FBM 来控制开关阀的动作,并且可以根据阀门位置开关的 反馈信号做出阀门动作“不匹配”报警。
 和粘贴缓冲区 (Paste Buffer)。 组态文件有库文件卷")
2. ICC 组态器的使用 2. 1 控制组态程序可编辑的 作区域是组态文件 (Configuration File) 和粘贴缓冲区 (Paste Buffer)。 组态文件有库文件卷 (Library Volume),站文件 (Station File 或 Station Volume) 和 便笺式 作文件卷 (Work Volume)。 库文件卷和 作文件卷是离线的组态文件,可用它离线编辑控制方案 ( 即组态 Compound 和 Block) 然后再拷贝装入控制处理机中。 站文件是安装在控制处理机中的控制数据库文件,可用它对控制处理机中的 Compound 和 Block 进行在线编辑。 粘贴缓冲区是一个临时的 作区,借助于它我们可以将组态文件在库卷和站之间转移。 Checkpoint 文件是控制处理机重新启动 (Reboot) 时,控制数据库安装文件。图 3-4 表示 了它们之间的相互关系。 2. 2 进入CIO控制组态的操作步骤 依次选择 [Sys] → Change_Env → Proc_Eng_Env → [Config] → Control_Cfg 进入以下子菜单 CIO_Config CIO_AP_Cfg CIO_STN_Cfg CIO_VOL_Cfg CIO_Seq_Edt

图 3-4
")
CIO_VOL_Cfg CIO_Seq_Edt 上述子菜单中, CIO_Seq. Edt 选择在编辑顺序模块时, 用户使用的编辑 具是 vi,或是 ICE 编辑器。 CIO_Config 进入控制组态的功能块组合 (Compound) 总貌访问 (CSA-Compound Summary Access) 画 面, 再从 CSA 画面选择要组态的控制站 (STATION) 或 文件卷 (VOLUME)。 CIO_STN_Cfg、 CIO_VOL_Cfg、 CIO_AP_Cfg 让操作人员可以直接进入某个控制站、 某个文件卷或 某个 HOST AP, 而不必通过 CSA 画面绕圈子。 在进入 CSA 后, 屏幕上会列出搜寻到的全部功能块组合 (Compound) 的名字, 也可指定 模块类型, CSA 会自动搜寻, 将符合要求的 Compound 列出来, 再在 Compound 名字列表 中选择要对其进行编辑的 Compound 名, 则在 CHOICE 下会显示所选中的 Compound 名字 ( 也可直接在 CHOICE 下键入要编辑的 Compound 名), 然后选择 OK, 组态程序就自动进入 包含该 Compound 的文件卷或控制站的编辑, 并将该文件卷或控制站的所有 Compound 列出 来, 光标停留在所选的Compound 上。 如果在 CHOICE下键入的 Compound 名是一个新的 Compound 名, 则组态程序进入Volwrk 作卷。 如果在 CSA 中不选择 Compound 名, 直接 选择 OK, 也进入 Volwrk 作卷, 可在此 作卷上离线编辑控制方案, 编辑完后, 再将 它保存 (SAVE) 到软盘或通过一个粘贴缓冲区 (Paste Buffer) 加到其它文件卷或控制站中。 在 CSA 中选择 Vol 则可进一步选择在线编辑到控制站中去(选择Station) 或离线编辑 到 文件卷上(选择Volume)。 在 CSA 中选择 CLOSE, 如果粘贴缓 冲区 (Paste Buffer) 中没有 Compound, 则退出控 制 组态程序。

HELP SHOW FBM PRINT NEW CHECKPOINT MAINT BUFFER EXIT Integrated Control Configurator Active STA = PCAT 00 @PCAT 00 Compounds: PCAT 00_STA PCAT 00_ECB Compound Functions: END ****** View Blocks/ECBs in this Compound Insert New Compound Edit Compound Parameters Copy to Paste Buffer Copy and Append to Paste Buffer Paste from Paste Buffer Save to Diskette Load from Diskette Move Group End Move Upload Compound Parameters Delete
 / 功能块 (Block) 画 面图 3-5, 控制组态程序提供 了顶部菜单 (见 3.")
从 CSA 进入编辑功能块组合 (Compound) / 功能块 (Block) 画 面图 3-5, 控制组态程序提供 了顶部菜单 (见 3. 3 节), 在顶部菜单下面显示 Vol=文件卷名(如果编辑文件卷)或 STA=控制 站名(如果编辑控制站)以及 Host AP 的标识码 (Letterbug)。 编辑功能块组合菜 单 (Compound Functions, 见 3. 4 节) 在画面左边列出了本组态文件中所有功能块组合的名 字 (Compound List) 。 3. 3 CIO 组态器顶端菜单介绍 (有星号的是顶端菜单, 其它为各顶端菜单的下拉菜单。) HELP 对当前的控制组态的功能给出简要说明 SHOW 当选择此菜单时出现一个下拉菜单,可在画面的右方显示一系列的表, 其下拉菜单为: Available CP's 显示系统所组态的 CP 的逻辑名 Available FBM's 显示系统所组态的现场总线和现场总线组件 Block Type Names 显示控制软件中所有的控制模块的类型名字 Diskette Directory 显示默认驱动器中盘片上的目录 Available WP's 显示系统所组态的WP的逻辑名 Available Printers 显示系统中所组态的打印机的逻辑名 Available Historians 显示系统中所组态的历史数据库的名字 CP Processing Periods 显示CP中的模块可选用的处理周期 GW Processing Periods 显示网间连接器(Gateway)中的模块可选用的处理周期 FBM现场总线组件 Fix ALL 将系统所组态的现场总线和现场总线组件加到控制组态数 据库, 并校正组态数据使与控制处理机的软件接口(ECB) 的定义一致。 Ladder Assignment 列出与PLB 所连的FBM, 以及它们所连的最多 8 个PLB 的 Compound: Block 名字。 CANCEL 关闭 FBM 下拉菜单。 PRINT 在指定的打印机上按所选方式打印 Compound, Block 名和参数
 文件,选择 CHECKPOINT 使得该控制站中的当前所有Compound、 Block")
NEW 关闭并保存当前组态文件,回到 CSA 画 面以选择另一个组态 文件. CHECKPOINT 当组态文件是控制站 (Station) 文件,选择 CHECKPOINT 使得该控制站中的当前所有Compound、 Block 和 Parameter 的值存入 CHECKPOINT 文件。 当控制站重新启动时,该文件 被装载到控制处理机。 MAINT 该顶部菜单提供如下下拉菜单: Load All 将指定软盘驱动器中盘片上的控制组态内容装入当前组态文件 Save All 将当前组态文件存入指定驱动器的盘片中。 Shrink 在组态文件中压缩由于做过 Delete 操作留出的空区,以节省存 储空 间。 Shrink将需一定的时间,建议在过程离线时做,当 Shrink 结束 时, 自动回到 CSA 画面。 Initialize 清除当前组态文件中的所有Compound 和 Block 包括顺序模块 和 PLB 模块的源代码文件。 Upload 将控 制处理机 中的 Compound 和 Block 包括 ECB 中所有可设 置参数的当前值存入控制组态文件。 Format Floppy 将指定的软盘驱动器上的盘片格式化。 Eject Floppy 对 50 系列 AP 所连的软盘驱动器,退出其中的盘片。 Cancel 关闭MAINT 下拉菜单。 BUFFER 将编辑区在组态文件和粘贴缓 冲区 Paste Buffer 之间转换, 利用 Paste Buffer 可将 Compound 从一个组态文件拷贝到另一个组态文件, 也可对模块 改名。 EXIT 退出控制组态,自动保存组态文件并清除删除区内容。 当 Paste Buffer 中有 内容时,需经确认,才可推出。 因为在退出控制组态 时,将删除 Paste Buffer 中的内容。

3. 4 Compound 编辑菜单 View Blocks/ECBs in this Compound-进入编辑功能块菜单 (Block Functions,见 3. 5 节) Insert New Compound-建立一个新的 Compound,并插入到所选位置之前。 Compound 名最多 12 个字符长度, 必须在整个系统中唯一。 Edit Compound Parameters-对所选的 Compound 进行编辑即修改其参数, 关于 Compound 参数我们在第 4 节中介绍。 Copy to Paste Buffer-给指定的 Compound 起一个新的名字并拷贝到 Paste Buffer 缓 冲区 在缓 冲区中, 除具有全部编辑功能外, 还可对功能块进行改名。 Copy and Append to Paste Buffer 当 Paste Buffer 中已有Compound 时, 将另一个所选的 Compound 拷贝到缓冲区并加在缓冲区中已有的 Compound 之后。 Paste from Paste Buffer-将缓冲区中的全部 Compound 加到本组态文件 Compound List 中当前选中的 Compound 之前。 Save to Diskette-将所选的一个 Compound 保存到指定软盘驱动器中的盘片上。 Load from Diskette-将指定的软盘驱动器中盘片上的一个 Compound 装到组态文件, 选用该菜单项后, 将弹出一个对话框, 要求输入要装载的 Compound 名, 如需 了解软 盘上有哪些 Compound, 可通过 [SHOW] Diskette directory, 在屏幕的 右边列出当前 软盘上所有的 Compound 名。 Select to Move-本菜单项与下面三个菜单项配合用来调整 Compound 的位置。 在控 制 时系统按 Compound 在列名表中的位置从上往下顺序执行。 因此,应该先执行的 Compound 在前、 重要的 Compound 在前。 本菜单项将当前选中的 Compound 作为要移 动的 Compound。 Move-与上面的菜单项配合使用, 将选中的 Compound 移动到新的位置前。 End Move-结束 Move Group 。 Upload Compound Parameters-将控 制处理机 中所选的 Compound 和它的 Block 中的 可 设置参数值送到控制组态文件,使组态文件中的这些值与当前实际值一致。 Delete-将所选的 Compound 删除。

3. 5 Block 编辑菜单 在 Compound 编辑菜单中选择 View Blocks/ECBs in this Compound 就进入模块编辑 菜单, 屏幕左边列出所选择的 Compound 中的所有功能块。 View Compound List-转到 Compound 编辑菜单 Insert New Block/ECB-建立一个新的模块并将它插入所选位置 Edit Standard Block/ECB Parameters-编辑模块的除可选参数外的标准参数 HELP SHOW FBM PRINT NEW CHECKPOINT MAINT BUFFER EXIT Integrated Control Configurator Active STA = PCAT 00 @PCAT 00 TANK_COM P END Block/ECB Functions: ECB*** END View Compound List CON 1** SEQ*** END Insert New Block/ECB CON 2** Edit Standard Block/ECB Parameters END Edit All Block/ECB Parameters DATA** Edit Ladder Logic Edit Sequence Logic Rename Block/ECB Select to Move Group End Move Upload Block/ECB Parameters
 Edit Ladder Logic-对可编程逻辑模块 (PLB) 编辑梯型逻辑 Edit Sequence Logic-对顺序模块 (MON, EXC,")
Edit All Block/ECB Parameters-编辑模块的所有参数(标准参数和可选参数) Edit Ladder Logic-对可编程逻辑模块 (PLB) 编辑梯型逻辑 Edit Sequence Logic-对顺序模块 (MON, EXC, DEP, IND) 编辑顺序逻辑 Rename Block/ECB-在粘贴缓 冲区 (Paste Buffer) 中修改模块名字 Select to Move-将当前选中的 Block 作为要移动的 Block。 本菜单项与下面三个 菜单 项配合用来调整 Block 的位置。 在 Compound 功 能菜单中有完全相同的菜单项, 在此不再作详细解释。 Move- Move Group- End Move- Upload Block/ECB Parameters- 将控 制处理机 中的所选模块的可设置参数的当前 值送 到组态文件。 Delete-将所选模块删除。 4. Compound/Block 参数 4. 1 参数及其属性 在控制软件中,每个模块完成一个特定的控制算法, 在模块设计时从通用方便这一目 的 考虑, 留有很多参数, 分为输入、输出、可 选三大类。当我们要具体使用某一模块时就 要为输入参数和可选参数赋值(也不是所有参数都要赋值, 很多参数有缺省值, 多数情况 下可以使用它们的缺省值)。 赋值的方法有三种: 一种可以让过程操作员在显示面板上赋值, 或其它程序对其进 行改写。 这类参数称为可设置参数; 一种只能由过程 程师通过 CIO 组态软件赋值, 这 就是不可设置参数; 还有一种参数的值要在模块运行时从其它模块上取来, 称为可连接参 数。 在前面二种参数中有些可以连接; 有些不可连接。 输出参数仅在模块手动状态时才可 设置。
,整型 (Integer), 布尔型 (Boolean),或 字符串型 (String) 每个参数 都有指定的值域范围, 资料上以下述格式列出参数: 参数名称 说 明 参数类型 连接/设置特性 范 围")
参数值的类型有实型 (Real),整型 (Integer), 布尔型 (Boolean),或 字符串型 (String) 每个参数 都有指定的值域范围, 资料上以下述格式列出参数: 参数名称 说 明 参数类型 连接/设置特性 范 围 NAME 功能块组合的名称 字符串型 不可连接/不可 设置 12个字符 DESCRP 功能块组合的说明 字符串型 不可连接/不可 设置 32个字符 PERIOD 功能块组合的处理周期号 整 型 不可连接/不可 设置 0 -- 10 PHASE 功能块组合的相位号 整 型 不可连接/不可 设置 0 -- 256 ON 功能块组合的状态 布 尔 型 不可连接/可 设置 0, 1 INITON 功能块组合初始化状态 整 型 不可连接/不可 设置 0, 1, 2 CINHIB 报警屏蔽的优先级 整 型 可连接/可 设置 0 – 5 GR 1 DV 1 · 接收报警信息的第一组 字 符 型 不可连接/不可 设置 6个字符 · 8 个设备的逻辑名 GR 1 DV 8 GR 2 DV 1 · 接收报警信息的第二组 字 符 型 不可连接/不可 设置 6个字符 · 8 个设备的逻辑名 GR 2 DV 8 GR 3 DV 1 · 接受报警信息的第三组 字 符 型 不可连接/不可 设置 6个字符 · 8 个设备的逻辑名 GR 3 DV 8 ALMLEV 指示功能块组合中的模 整 型 可连接/可设置 0 -- 5 块当前最高报警优先级 SSTATE 指示功能块组合中的顺 整 型 可连接/可设置 0, 1, 2 序模块的运行状态

4. 2 参数的连接 模块通过参数相互连接。 每个连接由可连接的源参数和可连接的目的参数 组成, 所 有的输出参数都是可以连接的,它们可作为源参数,而可连接的输入参 数可以是目的参数 或源参数。 参数间的连接方式是在目的参数处指定源参数的路 径名。 功能块组合名: 模块名. 参数名 这我们称为全路径名。 如果这二个模块在同一个组合块中则组合块名可以 省略, 写成 : 模块名. 参数名 注意冒号不可省。 访问组合块参数值可用指定功能块组合名. 参数名的方式。 功能块组合名. 参数名

5. 几个常用模块介绍 本节我们以几个控制回路组态的实例来说明功能块的使用和一些常用功能块的主要参 数。 5. 1 模拟量检测回路 使用 AIN 模拟量输入模块或 MAIN 多点模拟量输入模块构成模拟量检测回路。 AIN 模块的参数如下: 标准参数 IOMOPT - AIN 模块的输入是否取自 FBM 的选项,取值范围 0,1,2。缺省值为 1。 0=AIN 模块从它的 MEAS 参数取输入值,并且用 SCI 参数值对信号进行修正。 1=AIN 模块从由 IOM_ID 和 PNT_NO 所指定的 FBM 中的一个点取得输入信号, 且用 SCI 对信号进行修正。 2=AIN 模块从它的 MEAS 参数取输入值,不进行信号修正。 图 3 – 7

IOM- FBM 的标识码,模块从该 FBM 取得现场信号。 PNT_NO - FBM 中的点号,模块从上述标识号的 FBM中的某一通道取输入信号。 SCI - 输入信号修正号, 指定对输入信号进行何种修正 SCI=0 不作信号修正,脉冲计数输入 1 0 -20 m. A 线性转换成 0 -64000 码 2 0 -10 Vdc 线性转换成 1600 -64000 码 3 4 -20 m. A 线性转换成 12800 -64000 码 4 0 -20 m. A 开方式转换成 0 -64000 码 5 4 -20 m. A 开方式转换成 12800 -64000 码 6 0 -20 m. A 开方式转换成 0 -64000 码,0. 75%以下小信号切除 7 4 -20 m. A 开方式转换成 12800 -64000 码,0. 75%以下小信号切除 8 脉冲频率型输入 9 将输入信号线性转换成 1600 -64000码,带小信号切除 10 将输入信号线性转换成 12800 -64000 码,带小信号切除 11 -19 保留 20 B 型热电偶 21 E 型热电偶 22 未分配 23 J 型热电偶 24 K 型热电偶 25 N 型热电偶 26 R 型热电偶 27 S 型热电偶

FLOP - 是否要对信号输出进行滤波,0=不滤波,1=一级滤波,二级滤波 FTIM - 滤波时间常数。当阶跃输入时,输出到达稳态值的63%所需的时间,单位为分 XREFOP - 热电偶信号冷端补偿选择 1=选一外部温度信号作为热电偶的冷端补偿基准信号 0=用 FBM内部的第 9个通道作为热电偶的冷端补偿输入 XREFIN - 外部冷端基准信号输入 (摄氏度) KSCALE - 模块的处理是以摄氏进行的,用户可以转换成其它标准单位,KSCALE 即是转 换系 数 ORAO - 当为 “ 1” 允许超量程报警信息送出 ORAT - 超量程报警信息文本,最多 32 个字符 ORAP - 超量程报警信息的优先级 ORAG - 超量程报警信息送达的设备组 HLOP - 当设为 “ 1” 时,允许高/低绝对值报警 ANM - 用户定义的报警名称,最多 12个字符 HAL - 高绝对值报警的限值 HAT - 高绝对值报警文本,最多 32 个字符 LAL - 低绝对值报警的限值 LAT - 低绝对值报警文本,最多 32 个字符 HLDB - 高/低绝对值报警的不灵敏区 HLPR - 高/低绝对值报警的优先级 HLGP - 高/低绝对值报警信息送达的设备组 HHAOPT - 当设为“ 1” 时,允许高高/低低绝对值报警 HHALIM - 高高绝对值报警的限值 HHATXT - 高高绝对值报警文本,最多 32 个字符 LLALIM -低低绝对值报警的限值 LLATXT - 低低绝对值报警文本,最多 32 个字符 HHAPRI - 高高/低低绝对值报警的优先级 HHAGRP - 高高/低低绝对值报警信息送达的设备组

输出参数 PNT - 模块的输出 RAWC - 未作信号处理的 FBM的原始计数值,可用于校验测量仪表 BAD - 当 FBM设备状态出错或通道状态故障,或在 BADOPT 中指定的超量程 出现时, BAD=“ 1” HAI - 高报警输出指示器,当 PNT输出值大于 HAL时置为 “ 1” LAI - 低报警指示器,当输出小于 LAL时,置 “ 1” HHAIND -高高报警输出指示器,当输出值大于 HHALIM 时置为 “ 1” LLAIND - 低低报警指示器,当输出小于 LLALIM 时,置 “ 1” HOR - 高量程超限指示器,当输出超过 HSCO 1+OSV时,置 “ 1” LOR - 低量程超限指示器,当输出低于 LSCO 1 -OSV时,置 “ 1” BLKSTA - 32位的输出包参数,表示模块的运行状态 ALMSTA -32位的报警状态输出包参数,某一个 bit 为“ 1” 表示某一种报警已 发生 INHSTA -32位的报警禁止情况输出包参数,某一个 bit 为“ 1” 表示某一个报警 已被禁止 CRIT - 指示当前模块中已发生报警的最高优先级 (1 -5) PRTYPE - 指示当前模块中最高优先级报警的报警类型,根据模块的类型略有 不同 AIN 块 0=无当前报警 1=高绝对值报警 2=低绝对值报警 3=高高报警 4=低低报警

5. 2 单参数调节回路 使用 AIN 模拟量输入模块, PID 调节模块和 AOUT 模拟量输出模块可构成单参数调节 回路, AIN 模块将 FBM 来的测量信号进行修正,标度,报警等处理,其输出被连到 PID 模块的测量输入参数 MEAS。 PID 模块根据测量值与设定值 SPT 的偏差及 P、I、 D 整定参数的设置进行运算,其输出被连接到 AOUT 模块的输入 MEAS。 AOUT 模块 对信号进行输出修正后送到 FBM 的输出点。 PID 模块和 AOUT 模块的参数说明如下:

PID 模块的参数: 标准参数 MEAS-模块的测量输入 HSCI 1-测量输入的高量程刻度值 LSCI 1-测量输入的低量程刻度值 DELTI 1-模块输入在远方站传递分辩率,以输入全量程的百分比表示 EI 1-量输入的 程单位 PROPT-出错传导选择若置“ 1”,则当 RST (块处于远方设定时) 或 MEAS 输入出错时, 置模块输出参数 OUT 中的 ERROR 状态位为“ 1” SPT-本地设定值, 当模块处于本地设定状态时,可以由操作员设定, 当模块处于远方设 定状态时, SPT 值等于远方设定值 RSP。 FBK-外部积分输入,以产生积分作用并防止积分饱和, 单回路中一般连到下游 AOUT 模块反演算输出参数 BCALCO, 或连到本模块的输出参数 OUT MODOPT-模块 作方式选择 1=P控制 2=I控制 3=PD控制 4=PI控制 5=PID控制 PBAND-比例带 INT-积分时间常数,以分钟为单位 DERIV-微分时间常数,以分钟为单位 KD-微分增益 INCOPT-调节作用选择 “ 0”=反作用,“ 1”=正作用 HSCO 1-输出量程的高标尺 LSCO 1-输出量程的低标尺 DELTO 1-输出向远方站传递时的分辩率,以输出全量程的百分比表示 EO 1-输出的 程单位 HOLIM-输出高限值 LOLIM-输出低限值 OSV-输出超量程的允许范围,以百分比表示
")
MEASNM-测量值报警说明,最多 12个字符 MALOPT-测量值报警选择,当为 “ 1”时,允许测量值报警 MEASHL-测量值高报警限值 MEASHT-测量值高报警信息文本,最多 32个字符 MEASLL-测量值低报警限值 MEASLT-测量值低报警文本 MEASDB-测量值报警不灵敏区 MEASPR-测量值报警优先级 (1 -5) MEASGR-测量值报警信息要送达的设备组号 (1 -3) PID 模块的输出参数 BCALCO-模块的反计算输出,等于其测量输入 BLKSTA-32位的输出参数,表示模块的运行状态 ERROR-该输出值等于测量值减设定值 HDAIND-高偏差报警指示器 HHAIND-测量值高高报警指示器 HOAIND-高输出报警指示器 HOLIND-高输出限幅指示器 INHSTA - 模块当前的报警禁止情况输出参数 32位,每一个位表示某种类型报 警是否禁止 INITO-初始化输出指令,当模块手动、保持、跟踪或本地设定时置 “ 1” LDAIND-低偏差报警指示器 LLAIND-测量值低低报警指示器 LOAIND-低输出报警指示器 LOLIND-低输出限幅指示器 MEASHI-测量值高报警指示器 MEASLI-测量值低报警指示器 OUT-模块的输出

AOUT模块参数 标准参数 IOMOPT-AOUT 模块的输出是否送到 FBM 或 FBC 0= 输出值用 SCO 修正后存到 RAWC 输出参数 1= 输出值用 SCO 修正后存到 RAWC 输出参数,同时送到 FBM/FBC 2= 输出值不进行修正存到 RAWC 输出参数 IOM_ID-输出送往的 FBM/FBC 标识码 PNT_NO-输出送到 FBM/FBC 的通道号 SCO-输出信号修正号,指定对输出信号进行何种处理 0=不处理 1=将输出线性转换成 0 -64000 码 2=将输出线性转换成 1600 -64000 码 (用于 0 -10 V 输出) 3=将输出线性转换成 12800 -64000 码 (用于 4 -20 m. A 输出) ATC-气开阀还是气关阀。0=气开阀,1=气关阀 MEAS, HSCI 1/LSCI 1, DELTI 1, EI 1-测量值及其量程等 MEROPT HSCO 1/LSCO 1, DELTO 1, EO 1, HOLIM/LOLIM-输出值的量程,限值

5. 3 串级调节回路 图 3-9 串级调节回路信号连接示意图 串级调节回 路由二个 AIN 模块, 二个 PID 模块和一个 AOUT 模块组成 (如图 3-9)。 当 闭环运行时副调节器处于远方设定状态, 其远方设定值参数 RSP 连到主调节器的 输出参数 OUT。 为了实现无扰动切换到闭环控制,主调节器的初始化 输入信号 (INITI) 取自副调节器的初 始化 输出信号 (INITO)。 主调节器的反计算输入信号 (BCALCI) 取自副调节器的反计算输出 信号 (BCALCO)。同时副调节器的初始化输 入信号和反计算输入信号分别与 AOUT 模块的初始化输出信号和反计算输出信号相 连。
。 实验中 为让模块 活动起来, 我们用")
5. 4 流量积算回路由 AIN 模块和 ACCUM 积算模块构成 (如图 3 -10所示)。 实验中 为让模块 活动起来, 我们用 PID 和 LLAG 模块模拟一个过程, 并增加了信号切 换模块来了解高报警指示和高高报警指示的作用。
 或脉冲计数值 (PCNTOP=\"1\" 时) MTRFAC-转换系数,使测量值的单位与输出积 算值的单位相匹配。 例如,模块的处理周 期为 2 秒,测量值单位为 M")
ACCUM模块参数: MEAS-要累积的测量值,可以是流量率信号 (PCNTOP=“ 0”时) 或脉冲计数值 (PCNTOP="1" 时) MTRFAC-转换系数,使测量值的单位与输出积 算值的单位相匹配。 例如,模块的处理周 期为 2 秒,测量值单位为 M 3/分,累积 输出单位为 M 3 则 MTRFAC=2× 1/60=0. 0333333。 如果累积输出单位为 KM 3,则 MTRFAC 再要除 1000 为 0. 00003333。 SET-累计值置位指令。当为 “ 1” 时,使模块输出即累计值等于 PRESET 预置值。 PRESET-模块输出预置值 CLEAR- 累计值清零指令。当为 “ 1” 时,使模块输出值为零。 HOLD-当为 “ 1” 时,模块输出保持在当前值上。 当 CLEAR,SET,HOLD 信号同时为 “ 1” 时, 模块按作用的优先级动作, 优先级 次序为: CLEAR (最高),SET,HOLD (最低)。 PCNTOP-脉冲计数选择,为 "1" 时,模块累积脉冲计数输入;为 “ 0” 时,累积流 量型的测量输入。 CARRY-当模块的累积值超过输出高标尺 HSCO 1 时, CARRY 被置成 “ 1” 并保持 到下一 个处理周期, 而模块的输出值被置成累积值与 HSCO 1的差值。 因此 CARRY 可作为进位信号将几个积算模块串级起来,以获 得大的累积值。
; 定时块 (TIM); 独立块")
7. 顺序控制模块 有些生产 艺较为复杂, 它要求按特定的顺序依次执行。 I/A’S 的顺序控制模块就是为顺序控制和批量控制设计的。 实现顺序控制功能的 I/A 功能块有五个,它们是:监视块 (MON); 定时块 (TIM); 独立块 (IND);非独立块 (DEP);例外块 (EXC)。 在组态的时候,顺序控制模块要插入 在 End Seq 之前, End Con 1 之后。 它们五个之间必须 MON 在前,TIM 次之,然后 IND; DEP; EXC 任意。下面我们逐个介绍这些模块。 7. 1 定时块(TIM) 每个定时块可组态四个独立的定时器。每个定时器均可被设定初始值, 可被其他模块激活。 定时块被激活以后,以秒为单位进行计时,如初值设 定为负,当累计计时到 0, 在转为正值时,模块有相应的状态输出。 定时块的主要参数: RSTMA-定义模块在初始化以后的手/自动状态 0=手动 1=自动 TIMRn. R (n=1,2,3,4)-激活定时器的控制输入,同时是表示定时器是否 激活 (计时) 的状态标志。 当 TIMRn. R 被设成 “ 1” 时,第 n 个定时器被激活。 同样 TIMRn. R 为 “ 0” 时,第 n 个 定时器处于未激活状态。 TIMRn. V (n=1,2,3,4)-定时器的以秒为单位的累计值, 可被设定初始值。 当定时器处 于手动,或未被激活时,TIMRn. V 的值不被更新。 POS_Vn (n=1,2,3,4)-定时器累计值极性的状态指示, 这是输出参数。 TIMRn. V 的初始值设定成一个负值, 这时 POS_Vn 为 “ 0”, 当 TIMRn. V 累计 值为正时, POS_Vn 被自动置“ 1”。
 监视块用来监视过程状态或条件, 当这种过程状态和条件达到或相符 时, 模块可输出相应信号或激活其它顺序块 (EXC, IND,DEP 或 MON) , 使其执行。 每个监视块内可以编写")
7. 2 监视块(MON) 监视块用来监视过程状态或条件, 当这种过程状态和条件达到或相符 时, 模块可输出相应信号或激活其它顺序块 (EXC, IND,DEP 或 MON) , 使其执行。 每个监视块内可以编写 16 条语句 (即 16 个 Case), 每条语 句均可以是一些过程状态或条件的布尔表达式。 当某一表达式成立 (逻辑 为“真”) 时,其对应的输出次数 BO 00 nn 置 “ 1”。 只有当 Compound 为 ON, 模块处于自动, 且被激活 (ACTIVE=1) 才开始监视。 组态一个监视块包括二部分,标准参数和用户程序。 7. 3 顺序块 (IND、DEP 和 EXC) 顺序控制有五个模块, 我们又把其中的三个块称为顺序块,它们是: IND-独立块; DEP-非独立块; EXC-例外块。 7. 3. 3 顺序块的编程语句 数据操作语句 程序流向控制语句 ABORT EXIT ACTCASES EXITLOOP : = (赋值) FOR ACTIVATE GO TO SENDMSG IF START_TIMER REPEAT STOP_TIMER WAIT CALL WHILE

顺序模块算符一览表 算 符 逻辑运算 AND 与运算 OR 或 运算 NOT 非运算 说 明 算术运算 + 加 - 减 * 乘 / 除 DIV 整除, 舍弃小数部分, 例 11 DIV 3 = 3 MOD 模除, 只取余数部分, 例 11 MOD 3 = 2 = 等于 <> 不等于 <= 小于等于 >= 大于等于 < 小于 > 大于 关系运算

8. CALC 模块 计算模块提供逻辑运算、 算术运算和 RS 触发器等功能。 它的指令类似 汇编语言, 所有的运算都在堆栈中进行, 计算块的堆栈是一个先进后出的 堆栈, 下面提到的操作数, 就是指堆栈顶部的数据, 实际用到几个数要看 具体的运算指令是单目运算, 还是双目或多目运算, 譬如 ADD 加是双目运 算, 它将堆栈顶部的二个数据做加法, 而 LOG 就是单目运算。 运算的结 果仍放回堆栈的顶部。 CALC 模块最多 50 步编程。 模块的运算功能及算符 算术运算: ADD 加 SUB 减 MUL 乘 DIV 除 SQRT 开方 SQR 平方 AVG 平均 ABS 绝对值 MAX 最大 MIN 最小 LOG 对数 ALOG 反对数 LN 对数 ALN 反对数 EXP 指数 SIN COS 余弦 TAN 正切 ASIN 反正弦 ACOS ATAN 反正切 IDIV整除 IMOD 模除 MEDN 中选 POP 出栈 CHS 改变正负号 RND 取整, 四舍五入法 TRC 取整,截尾法 布尔运算: AND 与 OR 或 NOT 非(~) NAND NOR 或非 XOR 异或 NXOR 非异或 正弦 反余弦 RAND 与非 编程语句 基本语句: IN 输入 OUT 输出 CST EXIT 中断程序退出 清堆栈 END 程序结束 随机数

实验一. CIO 组态器使用实验。 在库卷中加入一个 Compound , 由下图三个模块组成: 步骤: 1. 在过程 程师环境下选择 Config Control_Cfg CIO_Config Vol Volume Vol 001 2. 从 Compound Functions 菜单中选择 Insert New Compound。在对 话框中输入组合模块名 TANK_COMP 3. 选择 Edit Compound Parameters,编辑组合模块参数: 再用鼠标点取 OK 保存组合模块参数。 4. 选择 View Blocks/ECB in this Compound,显示模块功能菜单, 5. 将光标置于 END CONT 1 上, 选择 Insert New Block/ECB 在 END CONT 1 前插入 AIN 模块。 输入模块名 LEVEL_MEAS 回车。 输入模块类型 AIN 回车;或者用鼠标选取顶端菜单 〔SHOW〕, 从其下拉 菜单 中选 取 Block Type Names,现在屏幕右边出现模块名列表, 从中找到你想 要的模块, 用鼠标选中它,这样该模块类型名就出现在光标所在的 TYPE 参数处, 然后用鼠标点 取 OK 即可。 用同样的方法在 END CONT 1 前分别插入 PID 模块,取名为 LEVEL_CNTRL、 AOUT 模块,取名为 VALVE_POS。
![第四章 显示与报警 控制组态完成后, 系统已经可以按控制组态中设定的方案对过程进行控制。 1 面板的显示与操作 1. 1 Compound & Block 选择 从顶部菜单敲击 [Select]](https://present5.com/presentation/eb6c6adefb6203071f5be3f4a4b99871/image-78.jpg "第四章 显示与报警 控制组态完成后, 系统已经可以按控制组态中设定的方案对过程进行控制。 1 面板的显示与操作 1. 1 Compound & Block 选择 从顶部菜单敲击 [Select]")
第四章 显示与报警 控制组态完成后, 系统已经可以按控制组态中设定的方案对过程进行控制。 1 面板的显示与操作 1. 1 Compound & Block 选择 从顶部菜单敲击 [Select] 键, 就可以进入如 图 4 - 1的 Compound & Block 选择 画 面。 通过这幅画面上可以直接存取 CP 中的 Compounds 和 Blocks 的详细显示 1. 2 模块的详细显示 在这一节我们以图 4-3 所示的 PIDE 模块的详细显示为例了解模块面板各部分显示的 意义及其操作的方法。

Alarm Status - 报警的状态,表示功能块最高优先级报警状态。 有报警时,报 警域的文本呈现二倍高的字母, 表示报警没确认的状态。 此域的背景色与报 警的优先级有关。 I/A 用不同的颜色表示报警优先级的高低。 一到五级报警分别用:红、深红、棕、深蓝、 灰色表示。
 通过详细显示可以方便地操作一个控制过程, 其不足之处是每次只能显示操作一块面 板, 如果一个过程较复杂需同时操作几个面板,就很不方便了。 组显示提供了在一幅显示 上同时显示最多八块面板, 并可随时通过点取 (Pick) 某块面板的表头, 再按 DETAIL 软键")
2 组显示组态与调用(Grp_Disp_Cfg) 通过详细显示可以方便地操作一个控制过程, 其不足之处是每次只能显示操作一块面 板, 如果一个过程较复杂需同时操作几个面板,就很不方便了。 组显示提供了在一幅显示 上同时显示最多八块面板, 并可随时通过点取 (Pick) 某块面板的表头, 再按 DETAIL 软键 切换到该面板的详细显示。
![2. 1 组显示组态步骤 (wp 30操作站方法) 在过程 程师环境下依次选择 [Config] → Grp_Disp_Cfg 进入组显示组态软件。 有 如下 六个顶部菜单。](https://present5.com/presentation/eb6c6adefb6203071f5be3f4a4b99871/image-81.jpg "2. 1 组显示组态步骤 (wp 30操作站方法) 在过程 程师环境下依次选择 [Config] → Grp_Disp_Cfg 进入组显示组态软件。 有 如下 六个顶部菜单。")
2. 1 组显示组态步骤 (wp 30操作站方法) 在过程 程师环境下依次选择 [Config] → Grp_Disp_Cfg 进入组显示组态软件。 有 如下 六个顶部菜单。 HELP - 提供使用组显示组态软件的在线帮助。 FILE - 管理组显示文件。 NEW - 建立一个新的组显示。 LOAD - 装入一个存在的组显示。 组态软件以菜单方式列出已有的组显示文件供 选择。 INSTALL - 将当前组态的组显示文件转换成可执行文件并保存。 EXIT - 退出组显示组态。恢复原先的显示画面。 FACEPLATES - 加入模块的面板。 TRENDS - 加入趋势线。 X/Y PLOTS - 加入相关曲线。 SOFT - KEYS - 改变底部的操作软键。 当我们选择了一幅新的画面, 组态软件就 自 动装入一组标准软键, 用本菜单键可以撤换成用户想要的软键, 用户可以在显示 组态中定制自己的软键。

2. 2 安装与调用 组态完组显示画 面后, 选用 FILE 子菜单中的 Install, 然后就可退出。 若直接 选 EXIT 退 出, 组态软件会提示是否要安装保存。 当选择了 Install 后, 就出现 安装文件的对话框。 在选择框内打入最多 14 个字符的文件名,回车, 再按 OK 键确认。若是修改 组显示, 可用 List 选择已有的文件名。这样将复盖掉该文件中原先的内容。 选择 框内名字设置完毕,选 OK。 缺省的路径是安装到 /usr/dispgrp/ 目录下,然后用文件管理 File Utilities(参考 第六章) 中的 Copy 功能,拷贝到 /usr/menus/dn (n=1~ 4)目录下。 也可修改 安装的路径,将组态 好的画面可直接安装到 /usr/menus/dn的目录下。 安装完退出 后, 在主画面的顶部菜单选择 Sft. Mnt → New_Menus。 这样在顶部菜单 Disp 的 dn 下, 就会出现所组态的组显示画面的名字。 2. 3 I/A 50 系列的组显示组态 在 50 系列中, 组显示不再作为独立的组态 具, 而把它归到 Display_Build (显示 建立) 组态 具的 FILE 子菜单中的 Import & Config。实际上在 PW 软件的显示建立 中也可以做组 显示, 只是在那里作为库元素调用。 在显示建立里做组显示有些方 面比用组显示组态 具 更灵活, 例如组显示组态只使用组趋势, 而在显示建立中 就有20种趋势供选择。 各种趋势的组态方法是一样的, 显示上的细微差异用一下就 知道了, 故这里不再详述。 在 50 系列上, 依次选择 [Config] Display_Build FILE Import & Config

这时出现子菜单如下: · Faceplate - 标准面板 · User Template - 用户 面板 · Single Block Trend Configuration - 趋势线组态带一个模块名 · Trend - 趋势线组态不带模块名 · XY plot - XY 相关曲线组态 · Profile plot - 轮廓曲线 2. 3. 1 Faceplate 面板组态窗口
的趋势线组态基本相同, 其唯一 的差别就在于上一节 LINE 1 到")
2. 3. 4 Trend 趋势线 这儿的趋势线组态与上一节(2. 3. 3 节)的趋势线组态基本相同, 其唯一 的差别就在于上一节 LINE 1 到 4 的变量名按模块名自动填入, 而这一节的 变量名需分别填写。 组态窗口和参数无任何区别
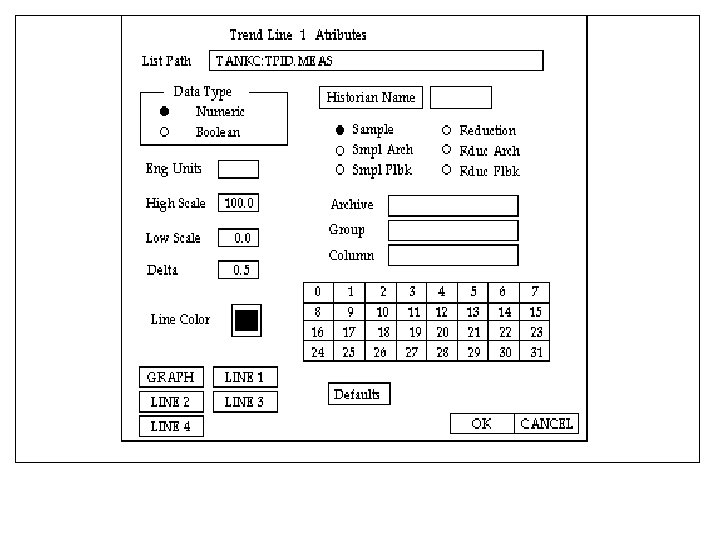

图 4-14 右上角 GRID 框分别定义实时和历史数据采用的网格时间宽度; PAGE 框是历 史数据的开始和结束时间。 VIEW 框也是 MERGED 与 BANDED 开关。 CONFIG 按钮 进入图 4-7。 中间是四个变量的名称和量程问题, FULL SCALE/ AUTO OFF 还是自 动量程问题; SCALING ZOOM 对趋势线变焦距, SHIFT 改变趋势线在图中的位置。

3 流程图的建立与组态 本节介绍如何使用 I/A’s 提供的显示建立与组态软件, 将生产现场的情况通过 流程图动态反映在显示 作站上, 以及设计你自己定义的操作手段。 3. 1 流程图的建立 在过程 程师环境下依次选择 [Config] → Display_Build 就可进入 “显示建立” 软件。 在 此我们先要了解鼠标的操作方法。 A. 按钮方式 作图时, 鼠标有三种击键方式: · press - 按住。按下按钮并保持住。 · Release - 释放。手离开按钮,由保持状态恢复到原来的状态。 · Click - 敲击。敲一下按钮,立即释放(< 0. 5 秒)。 B. 左按钮 (Select Button 选择按钮) · 选择目标-将光标放在目标内, 敲击 select 按钮, 被选中的目标周围出现 很小的正方形手柄, 如果被选中的目标是一个 “标记”(marker), 则以补色显示。 选中一个目标后, 若还要选中其它目标, 可按下 "shif " 键, 同时敲击左按钮, 就 可选择多个目标。 · 脱离目标-把光标置于所要目标的外面并敲击 select 按钮, 原目标周围的 手柄消 失。 · 套形光标(Lasso)- 用来选择多重目标或 微小难以点中的目标。 按住左 按钮, 这时若没有任何目标被选中, 就会出现 套形光标。 然后按住右按钮移动鼠 标, 将要选中的目标完整地套在由套形光标拉出的矩形内, 再释放右按钮, 这样, 被整体套入的多个目标同时被选中。 · 手形光标 - 用来改变一个目标的形状或移动它的位置。 按住左按钮, 这 时若有 任一目标事先已被选中, 就会出现手形光标。 将手形光标移到要移动位置 的目标 内, 同时按住右按钮, 就可将该目标移到想要的位置上去。 若要改变目标, 将手 形光标的大拇指与食指的中间对准目标的手柄, 同时按住右按钮, 移动鼠标 就可 改变目标的形状。

图 4-15
 用以起动作图 具或手形套形光标。 一般来说使用 “按住” 这种按钮方式, 但在使用多边形/多线形 作图 具时, 要用 “敲击”")
C. 右按钮(Activate Button -启动按钮) 用以起动作图 具或手形套形光标。 一般来说使用 “按住” 这种按钮方式, 但在使用多边形/多线形 作图 具时, 要用 “敲击” 方式。 菜单介绍: DRAW - 绘图 具, 其拉下菜单是各种可用的作图 具。 当选择某一 具后, 光标就变为 所选 具的形状。 具的形状见图 4-15 Square/Rectangle -- 正方形或矩形 Polygon -- 多边形, 作多边与多线形的图形时要注意鼠标的击键方式, 在每个顶点上要 使用 “敲击” 方式, “按下” 表示结束这个图形的绘 制。 Polyline -- 多线形,其与多边形的不同处在于, 用它画的目标是不封闭的, 即使你人为 地将其起点 和终点连在一起也不认为是封闭的, 因此不可充色。 Circle -- 圆,以按下鼠标到释放鼠标两点的距离为半径作正圆。 如要画椭圆, 可以先画圆, 然后用 手形抓住圆四角的任意一个手柄, 改变圆的形状, 就能得到以矩形的边长为长短轴的椭圆。 中间 的手柄用来改变圆的半 径。 Arc – 圆弧。 圆弧有三种: Open Arc -- 开口弧, 开口弧形是不封闭的, 不能填充颜色 Chord Arc -- 弦切弧 Pie Arc -- 饼式弧。 饼式弧和弦切弧可填充颜色。 初画出的弧都是 90 度的, 可以用圆弧两边的手柄来改变弧度, 中间的手柄改变 弧的半径。 饼式弧 和弦切弧在 90 度时, 外观上是一样的, 改变弧度后就能看出它们的差异。 Normal Text/Overstrike Text – 普通文本/复盖文本。 普通文本和复盖文本的差异是普通 文本带有底色 MARKER -- 标记。 系统提供了一些常用的图形标记, 也可以通过 [Config] 菜单下的 Marker_Edit 做 一些自己想要的标记。 使用前先从资源菜单上选择 Set Marker, 再从列出的标记表中选出要用的标 记, 然后用 Done 确认, 这样作图 具就变成你所选择的标记形状, 在要画标记的地方敲击右键就 能画上该标记。
 与 50 上略有不同。 PW 软件 50 系列 作站软件 New")
FILE -文件, 由其拉下的子菜单,提供对显示文件的操作管理。 其拉下菜单在 PW(30系列) 与 50 上略有不同。 PW 软件 50 系列 作站软件 New display -- 新显示画面 New Display Load Display -- 装入显示画面 New Overlay -- 复盖显示画面 Overlay Display -- 复盖显示画面 Load Save Display -- 保存显示画面 Save Configure Display -- 进入组态软件 Delete -- 删除显示文件 Exit -- 退出此环境,返回到原先的环境 Import -- 库元素输入 Import & Config -- 输入并组态 Export -- 库元素输出 Configure Display Exit
 1、根据 艺需要,做出所需要的覆盖画面; 2、也可以调用IA系统中面板库中的标准1/4控制覆盖画面,再将 所需的PID面板复制到该ovlay中")
控制覆盖画面的制作:(ovlay) 1、根据 艺需要,做出所需要的覆盖画面; 2、也可以调用IA系统中面板库中的标准1/4控制覆盖画面,再将 所需的PID面板复制到该ovlay中

3. 2 流程图的组态 把用显示建立产生的静态显示转变成能反映过程情况的动 态显示。过程操 作人员用这些显示来监视和控制过程。 如何在显示目标与过程变量间建立 联系- “联接”; 每个具体目标有哪些 可供联接的属性, 这是本节要学习的内容。 显示目标与过程变量之间的联接, 由相应过程变量的全路径建立, 格式为: Compound: Block. Parameter. 对于被选的显示目标, 这些联接允许传递的信息, 可以是 被动联接 - 显示被动地反映过程的情况 主动联接 - 操作员通过操作显示目标去影响过程 此外,还能建立显示目标与其它显示和复盖之间的联接。 进入显示组态软件有二条途经: a. 从 Display_Build 软件环境的 File 子菜单中选择 Configure Display b. 在过程 程师环境下选择 [Config] Display_Cfg 然后装入要做组态连接的显示画面。
 供选择显示目标;")
进入显示组态软件后其主菜单有: File - 文件 à Display - 显示。 在未选中任何目标前, 显示目标名和组名清单(如未给目标分 组命名, 显示建立软件自动以 具名给目标命名) 供选择显示目标; 若已有目标 被选中(以虚线表示), 则显示该目标可以联接的所有属性清单, à Connect - 联接, 按不同的属性提供相应的联接对话框 function - 功能, 当选用 Select 属性时, 该顶端键打开, 共有八种功能。 下面我们分别介绍各顶端键。 3. 2. 1 FILE File 的子菜单。 Load Display - 装入显示, 从目录中取出显示文件。 Install - 安装, 保存包含显示联接的图形,并转化为可执行的文件,存回到原文件中, 安装以后的文件去掉后缀 ". dwf"。 对于 50 系列, 显示建立软件产生的显示文件直接可 以执行, 因此没有 ". dwf" 后缀。 Builder - 显示建立, 进入显示建立软件。 Exit - 退出, 退出显示组态软件返回先前显示。

3. 2. 2 CONNECT 该顶端键下只有三个子菜单。 除了 Select, 其它属性只有 Variable 可选, 因此 大多数情况下无需选择就自动进入 Variable 联接对话框。 关于对话框中的参数, 在 3. 3 节叙述 Variable - 显示该属性对应的联接参数对话框供组态 Show - 显示选中属性的当前连接供修改, 也就是说只有当该属性已做过组态才 可选用 Trend - 若组态的目标是趋势线或 x/y 相关曲线, 该菜单键才打开 3. 2. 3 FUNCTION 当选择了 Select 属性 Function 键可选, 这是一个主动联接, 组态后当操作员点取该目 标就可执行如下八种功能之一: Execute program - 执行一个程序 Open Display - 打开显示 Open Overlay - 打开复盖 Write Text to File - 将文本写到文件中 Set Relative Pick - 设置相关变量, PICK 变量 Ramp - 设置斜坡软键 Close Display/overlay - 关闭显示/复盖 Momentary Contact - 设置瞬时触点开关

3. 2. 4 DISPLAY Display -- 显示当前画 面上的目标列表, 或一个已选中目标的属性菜单。 其由三个菜单 组成。 Ancestors Menu - 根菜单, 位于画面的左上角,显示当前选中的组的层次。 Components Menu - 组/目标菜单, 位于 Ancestors Menu 下面, 列出了当前选中的组的成 员。 以黄颜色显示的名称表示该组/目标已做过联接。 Attributes Menu - 属性菜单, 位于 Ancestors Menu 的右边, 仅在显示目标被选中时出现。 属性菜单 (Attributes Menu) 属性菜单显示了所选目标所有的属性, 属性连接的类型以及属性是否已作连接。下表 列 出了属性菜单内容及属性与连接类型的关系。 Visibility < 可视性 Contents (Active) > 内容主动 Select > 选择 Contents (Passive) < 内容被动 Color < 颜色 Read File < 读文件 Fill Color < 填充颜色 Start Angle < 起动角 Line Style < 线型 Arc Length < 弧长 Fill Level < 填水位 Marker Number < 标志号 Background Color < 背 景色 Marker Location (Active) > 标志位主动 Marker Location (Passive) < 标志位被动

下面几个符号出现在每一个属性的右边指出了连接的类型与状态: < 表示被动,该属性未连接 << 表示被动,该属性已连接 > 表示主动,该属性未连接 >> 表示主动,该属性已连接 x > 当一个主动属性已被组态, 其它主动属性就被取消, 以保证该目标只能 有唯一 的主动操作。 3. 2. 5 显示组态的参数 在做属性连接前, 先要考虑好需要该目标具有什么功能, 然后按需要选取合适的属 性。 显示组态不是显示的必要步骤, 在 I/A’s 作站上, 显示建立以后马上就可显示, 只是这 时的所有目标都是静态的, 需要动态显示的目标才要做组态。 操作步骤: 进入显示组态器后用 FILE 菜单中的 Load 装入要组态的显示画面。 点取 DISPLAY 键, 打开目标清单/属性菜单, 选取要组态的目标和合适的属性, 除 select 外, 就立即出现属性连接对话框; 若选择的是 select 则顶端键 FUNCTOIN 变为白色可选。 内容连续量被动连接 Contents < 作用: 将显示画面中的字符与过程变量相连, 实际显示时出现该变量的即时值, 如 测 量值、输出值、报警文本等。 过程变量可以是字符串变量 (Text); 也可以是数字量 (Real)。 Path name -- 路径名, 输入变量的全路径。有二种方式: i 直接用键盘输入 Cmp名: Blk名. Para (大写) ii 可用 List path 选出所要的变量, 其优点是不会写错。 Default path - 缺省路径, 组态软件将上一次组态的路径作为本次组态路径的缺省值 List path - 列表路径将列出运行的 CP 中所有 Compound, Block 及输入输出参数

可视性 visibility < 作用: 使目标在特定的条件下可见, 不满足该条件就不可见。 例如图 4-16 中的文本“ TANK LEVEL HIGH” 我们当然要求它在液位高于报警值 时才显示出来(在 作站上还可以使用闪烁色), 警示操作员注意过程的变化, 在没 有报警时就应该不可见。 填充层次 fill level < 作用: 任何可填充目标(园形,矩形,正方形,多形边,弧形)根据实变量的值填充 目标来模拟液位, 压力等。 颜色/填充颜色 Color/Fill color < 作用: 对过程状态的变化, 通过改变目标的颜色来提醒操作员注意过程变化。 Color - 改变目标的前景色。 前景色指矩形圆形等边框的颜色, 字符、标记的颜色。 Fill color - 改变目标的填充色。 选择 Select > 作用: 选择是一个主动的连接, 用它可做一些触发软键, 当操作员用鼠标点取该目 标后就执行指定的功能。 连接该属性就打开了 FUNCTION 和 CONNECT 顶端键。 Execute program-执行一个程序, 组态参数只有路径和保护级, 在路径上填入要求 执行的程序的全路径名包括文件名。 Open Display-打开显示,在路径上填入要调用的显示的全路径名 Open Overlay-打开覆盖, 与上一功能几乎完全一样, 仅仅多了要打开的覆盖在屏 幕 上的位置这一选择。 在路径名中输入 /usr/disp/ov 。 Write Text to File-将屏幕上该目标的文本写到一个 UNIX 文本文件中, 每点取一下, 就写入一次。 注意, 点取后不是出现一个输入框让操作员随意输入。

Close Display / overlay - 关闭显示/复盖, 没有任何参数, 选 OK 即可。 给图 4-17 中的 CLOSE OVERLAY 做上这个按钮。 Momentary Contact-瞬时触发。 有二种按键方式: Timed Pulse - 操作员按下鼠标键就触发, 延迟 Pulse Time 指定的时间 (秒) 后复原 Hold_down Pulse - 按下鼠标键并保持住, 松开鼠标键立即复原。 三种触发功能 (Options): 1: pulse to 1 - 触发置“ 1” 2: pulse to 0 - 触发置“ 0” 3: toggle - 反复, 原先是 “ 0” 的置 “ 1”; 原先是 “ 1” 的置 “ 0” 如果你想做的触发键是永久的, 即置 “ 1” 后就一直是 “ 1” 除非再次触发, 可以用 Select 属性 的第九种功能, 方法是: Select CONNECT Variable 最低状态为 0 , 状态个数 2 。 在状态表中 0 状态后取 1; 1 状态后取 0。 对于逻辑量 这就是 一个反复键。 如果是一个整型量可以有多种状态, 而且在一个特定状态, 操作员点取该目标后 就给该变量赋上指定的值。 将组态好的流程图安装, 选 File → install → Exit
![4 报警显示和报警组态 4. 1 系统报警指出由于硬件故障产生的报警情况。系统报警同站,以及与站相连的外围设 备或通讯网络的 作状态有关。 监视硬件的 作状态是系统管理软件的功能。系统管理软件分析当前设备和每一个站 的通讯状态及了解系统报警的状态。 所以要了解系统报警情况,须进入系统管理环境,可依次选择以下几个键 [sys] → Sys_Mgmt](https://present5.com/presentation/eb6c6adefb6203071f5be3f4a4b99871/image-99.jpg "4 报警显示和报警组态 4. 1 系统报警指出由于硬件故障产生的报警情况。系统报警同站,以及与站相连的外围设 备或通讯网络的 作状态有关。 监视硬件的 作状态是系统管理软件的功能。系统管理软件分析当前设备和每一个站 的通讯状态及了解系统报警的状态。 所以要了解系统报警情况,须进入系统管理环境,可依次选择以下几个键 [sys] → Sys_Mgmt")
4 报警显示和报警组态 4. 1 系统报警指出由于硬件故障产生的报警情况。系统报警同站,以及与站相连的外围设 备或通讯网络的 作状态有关。 监视硬件的 作状态是系统管理软件的功能。系统管理软件分析当前设备和每一个站 的通讯状态及了解系统报警的状态。 所以要了解系统报警情况,须进入系统管理环境,可依次选择以下几个键 [sys] → Sys_Mgmt → NETWORK 硬件发生故障,产生系统报警可用以下的方法来跟踪报警源: 一、指定的WP或AW顶部菜单的“sys”键变成闪烁的红色; 二、进入系统管理,System Monitor Domain 和各层网络画面上故障站的 Letterbug 呈现 红色或黄色。 4. 2 过程报警指出由CP所产生的报警情况,这种报警同在CP中运行的过程控制方案有关。 典型的情况有超量程报警,如模拟模块的绝对值报警或偏差报警,或数字模块的状 态报警等。无论是否组态报警设备,报警信息都会显示在模块面板图上以及在模块 详细显示画面上的 Block Alarm Summary Overlays 部分。 如果在 CIO 组态时指定了 报警设备,则当过程报警发生时,相应的设备上就会送出报警信息。 对送到显示 作站上的报警,顶端键 [Alarm] 就会发生变化,该键用四种方式指出 过程报警的状态: · 固定的绿色 - 过程运行正常,无报警。 · 闪烁的绿色 - 当前过程运行正常,无报警,但曾有过未被确认的报警。 · 闪烁的红色 - 当前过程有报警,且未经确认。 · 固定的红色 - 当前过程有报警,已经确认,但报警条件仍未消除。 选择 [Alarm] 键就可进入当前报警画面
可使操作员更快更方便地调 出与报警有关的显示或直接启动一段处理报警的程序。报警组态的 作是,a. 将某 幅显示或程序指定到某一报警键上; b. 当报警发生时让相应报警键上的报警灯闪 烁,告诉操作员按该键就可调出与报警有关的显示或启动报警处理程序。 一个")
4. 3 报警组态 当过程报警发生后,虽然可用上述方法找到报警源并处理报警,但并不方便。 I/A’s 提供的告示键盘(或称操作员键盘,报警键盘)可使操作员更快更方便地调 出与报警有关的显示或直接启动一段处理报警的程序。报警组态的 作是,a. 将某 幅显示或程序指定到某一报警键上; b. 当报警发生时让相应报警键上的报警灯闪 烁,告诉操作员按该键就可调出与报警有关的显示或启动报警处理程序。 一个 作站最多可有 2 个操作员键盘(WP 30)或 4 个操作员键盘( WP 50/AW 50,50系列可带二个 CRT,每个 CRT 二个操作员键盘)。每个操作员键 盘最多可有三个报警小键盘。每个报警小键盘有 16 个报警键。 4. 3. 1 Alarm Panel_Cfg 报警面板组态(报警键组态) 组态步骤: a. 依次选择 [Config] → Alarm_Panel_Cfg (见图 4-21) b. 选 ACTION → LOAD 指定要组态报警小键盘 PANEL 1~ 6,在图 4-21的 PANEL NUMBER 后显示出当前被选中的 PANEL 编号。 c. 在 1~ 16 键的位置上指定要组态的键,被选中的键编号呈红色 d. 选 ACTION → CHANGE 出现 ADD FUNCTION 窗口(见图 4-22)用 LIST 选择显示画面名或程序名,也可二者都要。如果显示和程序都有,操作员按键后系 统先执行程序,再执行显示。被执行的程序可以是 DM 命令。
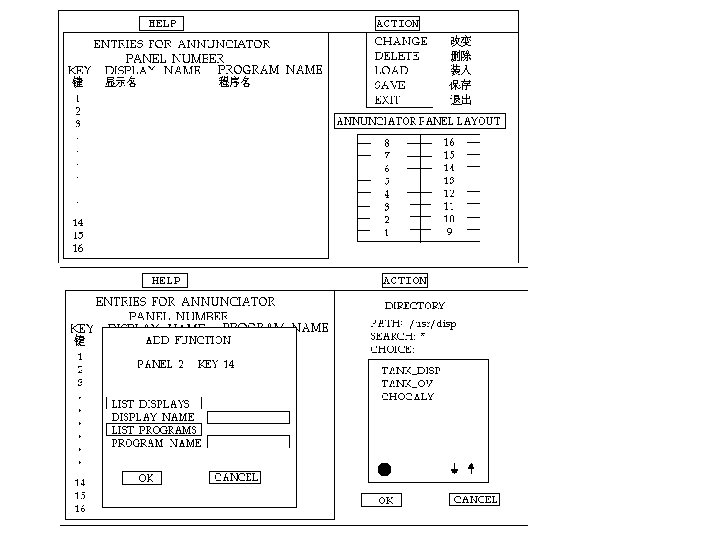

a. 选 OK 退回到 c. 组态其它键。 b. 一个 PANEL 组态好以后,选 ACTION → SAVE 将组态数据存盘,如果未存 盘就去组态其它 的PANEL,则前面的组态会丢失。 c. 如要组态其它 PANEL,回到 b. ,全部完成后选 ACTION → EXIT 退出组态器。
 报警表格组态分配 Compound 和 Block 到报警灯。当模块报警时,相应报警键上的报 警灯会闪烁。因为一幅流程图上会有很多模块,故可以指定多个模块到同一个报警灯上。 组态步骤: a.")
4. 3. 2 Alarm Table_Cfg 报警表格组态(报警灯组态) 报警表格组态分配 Compound 和 Block 到报警灯。当模块报警时,相应报警键上的报 警灯会闪烁。因为一幅流程图上会有很多模块,故可以指定多个模块到同一个报警灯上。 组态步骤: a. 依次选择 [Config] → Alarm_Table_Cfg 进入组态软件(见图 4-23) b. 选 ACTION → ADD 出现 ADD FUNCTION 窗口用 LIST 选择组态的模块 c. 选中 PANEL 和 BUTTON 后面的输入框,填入报警小键盘和键的位置编号 d. 选 OK 返回到 b. 组态其它报警灯 e. 都组态好以后,选 ACTION → SAVE 将组态数据存盘 f. 选 ACTION → EXIT 退出组态器 注意组态数据仅仅是存入硬盘,没有哪一个显示 作站装入这些组态数据,因此上述 组态要重新启动该显示 作站后方才有效。

4. 4 50 系列的报警组态 4. 4. 1 在 PW 上做组态再转换成 50 系列的文件 方法如下: a. 将在 PW 上做好的报警组态的二个文件 /usr/fox/alarms/PWWP 00 AAtab /usr/fox/alarms/PWWP 00 AApan 拷贝到 50 系列相应的 作站或其 HOST 的硬盘中,路径及文件名为: /usr/fox/alarms/<WPLNAME>AAtab /usr/fox/alarms/<WPLNAME>AApan 其中 <WPLNAME> 是相应 作站的逻辑名 b. 再分别执行下面二条转换命令 /usr/fox/wp/bin/tools/cvtalmtbl alarm_table_文件名 /usr/fox/wp/bin/tools/cvtalmtbl alarm_panel_文件名 这种办法并不方便, 如果已经有 20 系列或 PW 上的组态文件,再升级成 50 系列 时不妨使用这种方法。如要重新做不如采用下面的方法。

4. 4. 2 在 50 系列中直接用 VT 100 编写报警文件存放的目录: /usr/fox/alarms 文件名:<WPLNAME>AApan 文件内容: dmcmd script dmcmd clralmpnl dmcmd addalmpnl 1 1 D 显示文件名1 dmcmd addalmpnl 1 1 P dmcmd run 程序文件名1 dmcmd addalmpnl 1 2 P dmcmd run 程序文件名2 dmcmd addalmpnl 1 3 D 显示文件名3 …………… dmcmd addalmpnl 5 15 D 显示文件名n dmcmd addalmpnl 5 16 C 命令 通用格式为: dmcmd addalmpnl n m C/P/D/T 命令/ 程序/显示/目标显示管理器名 其中:n 表示第 n 个 Panel, 范围从 1~6。 m 表示第 m 个键, 范围从 1~16。 D 表示该键的作用是调用显示,显示文件名必须是全路径的。 P 表示该键的作用是调用程序,程序文件名必须是全路径的。 C 表示该键的作用是执行命令,可以是一个 DM 命令如报警确认。 文件名:<WPLNAME>AAtab 文件内容: #COMPOUND BLOCK PANEL KEY # COMPOUND 1 BLOCK 1 1 1 COMPOUND 2 BLOCK 2 5 10 …………… COMPOUND 3 BLOCK 3 1 12 <WPLNAME> 为显示操作站的逻辑名,
子系统的功能 在 I/A‘S 中, 用历史记录替代了一般的记录仪表。由于它是以数字量记录的, 就为这 些 数据的再加 提供了可能,并可以给其他用户共享。我们使用历史组态器来告诉 系统哪些过程数据需要采集(记录),采集来的数据要作哪些处理,以及对处理后")
第六章 历史组态与过程报表 1. 历史 (historian)子系统的功能 在 I/A‘S 中, 用历史记录替代了一般的记录仪表。由于它是以数字量记录的, 就为这 些 数据的再加 提供了可能,并可以给其他用户共享。我们使用历史组态器来告诉 系统哪些过程数据需要采集(记录),采集来的数据要作哪些处理,以及对处理后 的数据如何归档保存的问题。 在学习历史记录这一章节前,我们先要了解以下几个概念: · 采样组 (Collection Points) -- 在这个组里存放要采集的过程数据采样点的名称及其采 集要求。采集来的数据可以直接用于历史趋势线的显示。 采样点的个数由系统组态 时确定, 可组态成 500 ~ 8000(500 注:括号内为 AP 20 的数据,下面的括号同样, 并不再说明 ); 所有点的采样周期都可以组态成 2 秒(2秒的点不超过 10%)。 4000 个采样点至少要占用 24 M 内存, AP 51/AW 51 每秒更新的点数不超过 250 个。 每个点采集来的记录先放在内存中, 满 100(10)条记录后一起送到一个循环文件中, 该文件缺省保存 600(200)条记录, 最多可保存 99, 999, 000(99, 200 需装有扩展硬 盘)条记录。
 -- 提供了对采集来的大量过程数据进行归约浓 缩再加 处理的方法,经过浓缩组处理的数据可提供给过程报表使用, 也可以 将浓缩处理以后的数据再次进行浓缩, 即串接浓缩。 系统提供了八种浓缩算法: SUM 合计值 AVG")
· 浓缩组(Reduction Groups) -- 提供了对采集来的大量过程数据进行归约浓 缩再加 处理的方法,经过浓缩组处理的数据可提供给过程报表使用, 也可以 将浓缩处理以后的数据再次进行浓缩, 即串接浓缩。 系统提供了八种浓缩算法: SUM 合计值 AVG 平均值 MAX 最大值 MIN 最小值 STDV 标准差 KURT 曲线峰态 · 信息组(Message groups) -- 存放整个系统的信息。这个组的成员在系统装入时就已组 态好, 用户只可修改组态参数,不能在这个组中加入或删除任何成员。 · 归档组(Archive groups) -- 以上三个组的数据只能保存指定的时间或记录条数, 超过 以后, 新写入的数据将复盖最早的数据。 归档组定义它的这些成员什么时侯需要归档。 然后由系统操作员定期将归档的数据拷贝到磁带或软磁盘。
 在其下拉菜单上可找到 Historian")
2. 历史子系统的组态方法 从顶端菜单上选取 Config (如找不到该键,则应先选 Sys → Chang_Env → Proc_Eng_Env 进入过程 程师环境) 在其下拉菜单上可找到 Historian → Configurator,进入历史子系统组态软件, 图 6-1
进行组态编辑,可选择 Historian 菜单, 再在其子菜单中选择 要组态 编辑的历史数据库名。")
以下介绍各个顶部菜单的作用 Help - 提供在线帮助。 Historian - 屏幕顶上一行显示出当前选中的历史数据库名,如要对其他历史数 据库 (如果有的话)进行组态编辑,可选择 Historian 菜单, 再在其子菜单中选择 要组态 编辑的历史数据库名。 File - 用于建立存放历史组态信息,它有二条子菜单。 Store Configuration as File - 把全部历史子系统组态信息以文本的形式存入一文件 中, 文件名任取, 缺省的路径为 /usr/hstorian/。 Load Configuration from File - 把上面存入的历史子系统组态文件读回到系统中 Edit - 提供了对采样组、浓缩组等进行组态的子菜单,下面将详细叙述。如果 要进入组态编辑,系统会提示关闭历史子系统进程,这时应选择 DEACTIVATE。 如果只是要查看组态信息,可选择 CONTINUE (READONLY)。 每次系统上电启动 后, 历史子系统进程自动被激活,并开始采集过程数据。 Reports - 用于打印历史组态信息和历史数据,具体要打印哪些信息可在其子菜 单上选择。 在组态、 显示等不同的历史子菜单下, 其下拉菜单会有所不同。 Switch To - 用来切换到历史子系统的投运、显示等 具。 Exit - 退出历史子系统软件。
 组态 选 Edit → Collection Points(这时如果历史是激活的,将提示关闭, 然后)屏幕显示如 图 6")
2. 1 采样点 (Collection Points) 组态 选 Edit → Collection Points(这时如果历史是激活的,将提示关闭, 然后)屏幕显示如 图 6 -2。 屏幕的上面是已经组态的采样点清单及参数。 图 6 - 2

在 Option 窗口有三项选择 Compound: Block. Variable - 直接在右下角的对话 框 中填入采样点的全路径名。 Select C: B. P from List - 让系统列出功能块组合名,功能块名和参数名清单, 从 中选择要组态的采样点。 Show Collection Summary - 显示采样点组态小结。 在右下角的对话 框 中,列出了缺省的组态参数,可按各自的要求作修改。 组态参数: Description - 采样点的说明,最多 32 个字符长。 Update time - 采样数据的更新时间,确定过多少时间要采集一次数据。 Retention Span - 采样数据的保存时间。 Number of Samples - 采样数据的保存个数。此数值与更新时间、保存时间有关。 采样 数据的保存个数=保存时间/更新时间。 Deadband - 死区。一般取 2. 0,既当数据的变化小于量程的 2 个单位时不更新。目的 是为了减少读写的数据量。 所以当每秒更新的点数超过 250 个时, 可考虑调整死 区。 组态参数修改好以后要选 Done 把它加入到数据库中。这时你可看到在上半屏的采样点 清单中 (HISTORIAN COLLECTION POINTS) 加入了这个采样点。

3 操作历史数据库 通过操作某一历史数据库可以启动或停止某一历史数据库以及这一历史数据库中的某 个 组的运行。依次选择 Switch To → Scheduling 或从 程师环境的顶端菜单上选 Config → Historian → Scheduler (图 6 -8)
,屏幕上列出系统中装入的 历史数据库名,选择要投入运行的历史数据库,如果有多个历史数据库要一起投入运 行,可选取底部菜单上的 Select All。 然后选 Start。")
3. 1 启动与停止历史数据库的运行 先选 Schedule Historians 下的空心园 (实心园表示已被选中),屏幕上列出系统中装入的 历史数据库名,选择要投入运行的历史数据库,如果有多个历史数据库要一起投入运 行,可选取底部菜单上的 Select All。 然后选 Start。 这时在屏幕的最末一行显示出历 史的启动信息, 刚才选中的历史数据库名后面的 OFF 改为STARTING 表示正在启动, 最后出现 ON 表示启动完成投入运行。 历史数据库投入运行时采样组和信息组同时投 入运行。I/A 系统上电启动后,历史数据库立即投运,不必另行启动。 4. 历史数据库的维护 4. 1 历史数据库的备份可以与 I/A 系统的备份一起做, 历史子系统的顶端键“File”中的 “Save” “ Load”也可用来备份和恢复历史组态, 再有历史子系统中的“Archive_Backup” 有一“Backup Main Database”也是用来做备份的。

第五章 系统维护 1 、系统通电步骤: 检查系统各站及组件安装完好后,即可通电。 通电前,请检查市电是否正常,UPS 作是否正常,各电源接线是否准确。 检查完毕,先对 CRT、打印机等设备上电自检。 随后,对装有站组件的机柜上电。 开启 AW Sun 作站,注意与该 AW 相连的 DNBI 或 DNBX 组件的红绿灯闪烁情况, 一开始,红灯亮,绿灯有规律地闪动,组件自检结束后, 作站进入 作软件装载时, 组件上将只亮绿灯。 接着, 再开启其他 作站和 FBM 组件机柜。 经过一段时间的自检和启动,所有组 件均显示绿灯, 所有 CRT 上均显示画面, 系统即投入正常 作中。 系统开启后首先 要设置时钟。 注意: 在开机柜电源时, 必须先开主电源, 后开副电源。 2、关机步骤 I/A 使用的是一个多用户多任务的操作系统, 因此即使没有人在使用计算机也不 能随意切断电源, 必须按下述步骤关机, 否则有可能损坏文件系统或硬盘。 AW/WP 关机:进入过程 程师环境, 依次选择 [Sft. Mnt] → Shutdown_AW 等待 出现 # 字提示符, (如要搬运输入命令 halt), 然后才能断电或重新启动。 重新启 动的命令是 reboot。 断电后最好等 1. 5 分钟后搬运。 注意, 不要用进入 VT 100 窗口, 输入 Shutdown 命令这种方式来关 AW/WP。
。 I/A 启动后, 该软件即自动投入运行。 利用它和它的人机界 面,我们可以方便地了解和响应系统中各设备的运行和系统通讯情况。")
3. 系统管理软件概要 I/A 系统提供了一套用于本系统 作情况监测的软件包, 我们称之为系统管理软 件(System Monitor)。 I/A 启动后, 该软件即自动投入运行。 利用它和它的人机界 面,我们可以方便地了解和响应系统中各设备的运行和系统通讯情况。
, 这就是操作员与系统管理软件对话的人机界面。 · 要退出该人机界面,按菜单栏上的 CLOSE 键。")
3. 1 启用人机界面 · 把光标移至菜单栏上的 SYS,点一下鼠标左键,出现下拉菜单。 在下拉菜单里找到 Sys_Mgmt,用鼠标选中,数秒钟后,屏幕上弹出如下一幅画面(见图 8-5), 这就是操作员与系统管理软件对话的人机界面。 · 要退出该人机界面,按菜单栏上的 CLOSE 键。 注意:Sys_Mgmt 所在位置可能会因用户提出的环境设置要求而改变, 请询问设计人员它 的确切所在。 CLR MSG – 清除屏幕顶部的测试信息 ACK CBL – 确认电缆报警 ACK ALL – 确认所有报警 SAL – System Alarm List, 显示报警设备名清单 NETWORK – 显示 I/A 的网络结构 TIME – 设置时钟 PERF – communication Performance display 显示通讯情况 CONFIG – 显示被选中的 作站 OFFLINE – 离线诊断 INH DISP - 被禁止报警的设备名清单 上面的 ACK ALL 是确认所有报警, 如要分别确认各个报警的设备, 可按下面的步骤操作: 选中站 → Config → 选中组件, 这时底部出现 EQUIP INFO 按钮, 按下它后, 再按 ACK 按 钮, 确认该组件的报警。

3. 2 时间设置 · 在人机界面画面下方,选择 TIME 键。屏幕上出现如图 8-6 的画面。 · 点按大小箭头,调整时间至你所需时间。 选择 RETURN-SET,可以确认你所设置的时间,回到上一幅画面。 选择 RETURN- CANCEL,将不改变系统原来的时间,回到上一幅显示画面。 注意:在I/A 系统开机后, 必须用此时间设置功能, 确认系统时间, 保证整个网络上 各站时间一致。 否则, 即使时间正确, 有些软件还是不能激活, 如 CIO 组态器等。

3. 3 故障响应 系统中任何设备发生异常时,例如:打印机的打印电缆脱落,现场智能变送器与 I/A 系 统的通讯中断,都将引起系统管理软件的报警响应。 I/A 菜单栏上的 SYS 键区域将会翻红 并闪烁。 同时,事先指定的打印机上也会输出报警信息。 SYS 区域在每个环境中都会存在。 它有以下四种颜色状态,指示不同的系统硬件的当前情况。 固定的绿色 正常 闪烁的绿色 曾经出现过故障又恢复了正常,但未确认过。 闪烁的红色 有故障,尚未确认。 固定的红色 故障尚未解决,但已经确认。 3. 3. 1 故障查找 系统管理软件在各个管理画面中利用组件的 Letterbug 名的颜色变化和边框的颜色变化来 指示各组件设备的当前状态和系统通讯情况。 白色边框 正常状态,系统通讯正常 红色边框 系统中存在通讯故障 灰色 Letterbug 该组件不应出现在系统中 白色 Letterbug 组件 作正常 黄色 Letterbug 该组件下属设备中有 作不正常者,或冗余组件里有一 方 作不正常 红色 Letterbug 该组件出现故障 闪烁的文字和星号代表系统中有未经确认的故障存在。 如果在设备名后有 “<” 符号, 说明此设备的报警被人为禁止。 在 EQUIP CHG 里,可以选择恢复该设备的报警。 当系统报警后,进入系统管理软件的人机接口界面,交替使用 NEXT LEVEL 和双向上箭 头,根据上述的颜色定义就能查找到发生故障的设备,采取诊断措施,查找故障原因。

3. 3. 2 故障确认 查找到了故障设备,可以向系统表明我们已经了解了系统的报警原因。 表明的方式如下: · 对于系统通讯报警,可以用画面菜单栏上的 ACK CBL 来确认。 · 对于设备报警的确认有二种方式: 全体确认:在初始画面里选择 ACK ALL 可以对所有设备的报警进行确认。 个别确认:在各个设备的 EQUIP INFO 画面里选择 ACK 可以对该项的报警给予确认。 确 认后,报警颜色将不再闪烁。 4. 日常维护 4. 1 硬件维护 发现故障设备时,如有备件应立即更换,安装备件时,请使用镊钳(Letterbug Tool) 掉换 Letterbug, 等到新装组件绿灯亮时, 在系统管理软件里应看到该组件设备名为 白色,证明备件已正常 作。 拆卸站组件时, 必须先松开 “外部设备装卸螺钉”(见 图 7-3), 然后再旋下安装螺栓。 安装的步骤相反,
以及恢复损坏/丢失的软件(本 章第 6 节), 和监视系统硬盘的使用情况。 如果可能,最好做一个硬盘的磁带备份。 系统在正常运行时,请不要对系统内容随意修改、删除或增加。")
4. 2 软件维护 作为软件维护, 主要 作是做软件备份(本章第 5 节)以及恢复损坏/丢失的软件(本 章第 6 节), 和监视系统硬盘的使用情况。 如果可能,最好做一个硬盘的磁带备份。 系统在正常运行时,请不要对系统内容随意修改、删除或增加。 要注意口令字的保密和 记忆。 对系统作出必要修改后,一定要作出修改部分的备份。 在备份盘片上注明备份 日期, 备份方式(如是 cp 格式还是 tar 格式),妥善保存。 要关心硬盘的可用区间尤 其是根目录下的可用区间大小。 在 VT 100里,用 df –k 命令可查看硬盘的使用情况。 一般情况,根目录下可使用空间应大于 30%。 为了保 证可用空间,可以按以下提示整理硬盘。 · 查找无用的 core 文件并删除之。 用如下命令查找 core 文件 find / -fstype urfs -prune -o -name core -print 进入该 core 文件所在目录,用 rm 命令删除 core 文件。 · 删除 /var/mail 目录中过时的信箱文件。 · 删除 /opt/fox/rptwrt/rpt_run/<report name>. prn目录中无用的报表输出文件。

5.软件备份 5. 1 磁带机的安装 如果你的 I/A 系统中有 5 GB 磁带机,就可以用它对 SUN 作站的硬盘进行备份 作。当然,我们首 先要把磁带机联到 作站上。 每一台 SUN 作站和磁带机都有一个 SCSI 接口,查阅说明书,我们很容易 确定 SCSI 口的位置。 SCSI 如同 PC 里的 IDE,是一种主机CPU 与外设通讯的总线标准。 磁带机附有一根 长约半米的 SCSI 电缆,用它的二端分别连接 作站和磁带机的 SCSI 口,连接 作就完成了。 再将磁带机 的地址号定在 5 上,我们就可进行备份 作了。 5. 2 备份 备份 作可分为二种类型,对少量文件的备份和对整个硬盘的备份。 A. 文件备份 使用 SHELL 命令中 cp 或 tar 可将文件转存至磁盘上。 例一、将硬盘上 /usr/tmp/myfile 1 用 cp 拷贝至 1. 44兆软盘 · 通过 Proc_Eng_Env 或 Soft_Eng_Env 中 Sft. Mnt 下拉菜单进入 VT 100。 · 将软盘放入软驱中。 如果是新的软盘,请在 VT 100 提示符 “#” 下,打入下列命令 fdformat newfs /dev/rfd 0 c 计算机将对这张软盘进行格式化。 · 在 VT 100 提示符 “#” 下,打入下列命令 mount /dev/fd 0 /f 0 (挂上软盘) cp /usr/tmp/myfile 1 /f 0 (拷贝) umount /dev/fd 0 (卸下软盘) eject /dev/fd 0 (从软驱中弹出软盘) 例二、将硬盘上 /usr/menus/d 1 下所有流程图文件拷贝至软盘上。 · 进入 Proc_Eng_Env 或 Soft_Eng_Env 中 Sft. Mnt 下拉菜单中的 VT 100。 将软盘放入软驱中。 · 打入下列命令 tar cvf /dev/fd 0 /usr/menus/d 1 eject · 如果软盘中已有其他 tar 方式备份文件,你还要保留,上述命令中第一行应改为 tar rvf /dev/fd 0 /usr/menus/d 1
eb6c6adefb6203071f5be3f4a4b99871.ppt