f0150edb014644f224ea66570a85b24a.ppt
- Количество слайдов: 94



เครองจกรกล NC หนยนตอตสาหกรร ม ระบบขนถายวสดอ ตโนมต ระบบจดเกบและเรยก อ. ภม คนวสดอตโนมต เหลองจามกร poom. l@chula. ac. th

ระบบการผลตแบบย ดหยน ปารเมศ ชตมา ISBN 970 -346 -9052
")
NC MACHINE (Numerical Control Machine)

เครองจกร NC คออะไร uสามารถทำงานโดยอต โนมต uโปรแกรมการทำงานได uควบคมดวยรหส

ตวอยาง CNC ซาย แผงควบคม กลาง
 DNC CNC (Direct NC) (Computer NC)")
NC (Numerical Control) DNC CNC (Direct NC) (Computer NC)

N C โปรแก หนวยคว รม บคม DN C คอมพวเตอรศนยก ลางขนาดใหญ CN C คอมพวเตอรข นาดยอม เครองจ กรกล

ลกษณะพเศษของ DNC uควบคมจากศนยกลาง uตงคอมพวเตอรหางจ ากเครองได

ลกษณะพเศษของ uเกบขอมลเปน CNC ไฟล สามารถ โอนถายได uเกบโปรแกรมไดจำนวน มาก uแกไขโปรแกรมทเคร องได

ขอดของเครองจกร uมความแมนยำสง uลดเวลาทตองสญเสยโดย ไรประโยชน uลดเวลานำ uเพมความยดหยนในการ ผลต เปลยนลกษณะการทำงานไ ดงาย NC

ลกษณะงานทเหมาะกบเ ครองจกรกล NC uชนงานตองการความเท ยงตรงสง uมความซบซอน uมการดำเนนงานหลายอ ยางบนชนงาน

Machining Center uการเปลยนเครองม อโดยอตโนมต uความสามารถในการเคล อนทชนงานโดยอ

ชนดของ NC uแกนหลกอยแนวนอน ชนงานหมน –Turning Machine , Lathe เครองกลง uแกนหลกอยแนวตงฉากกบ
 u. Work table โตะงาน (milling) u. Tool ใบมด uระบบนำมนหลอลน")
สวนประกอบของเครองจ กร NC เพลาหลก (rpm) u. Work table โตะงาน (milling) u. Tool ใบมด uระบบนำมนหลอลน uระบบเปาทำความสะอาด u. Spindle

ระบบชดเชยชนดตางๆ uระบบชดเชยการสกหรอ uระบบชดเชยการสนสะ เทอน uระบบชดเชยความรอน
RIA (")
หนยนตอตสาหก รรม อปกรณสำหรบหยบหรอยกย ายทสามารถโปรแกรมใหมไดและท ำงานไดหลายหนาท ซงถกออกแบบมาใชในงานเกยว กบการเคลอนยายวสด ชนงาน เครองมอหรออปกรณพเศษ Robot Industries Association )RIA (
 ระดบขนความเสร u. Joint ขอตอ u. Link")
กายวภาคของหนยนต u. D. O. F. (Degree of Freedom) ระดบขนความเสร u. Joint ขอตอ u. Link สวนประสาน u. Body and Arm สวนตวและแขน
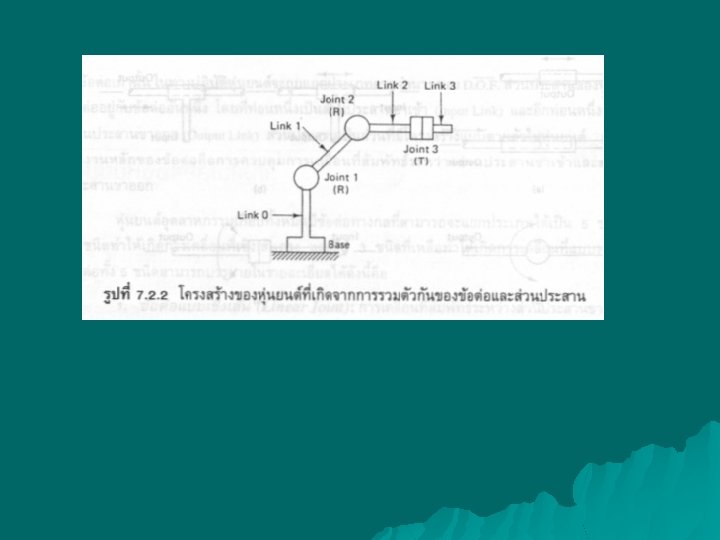
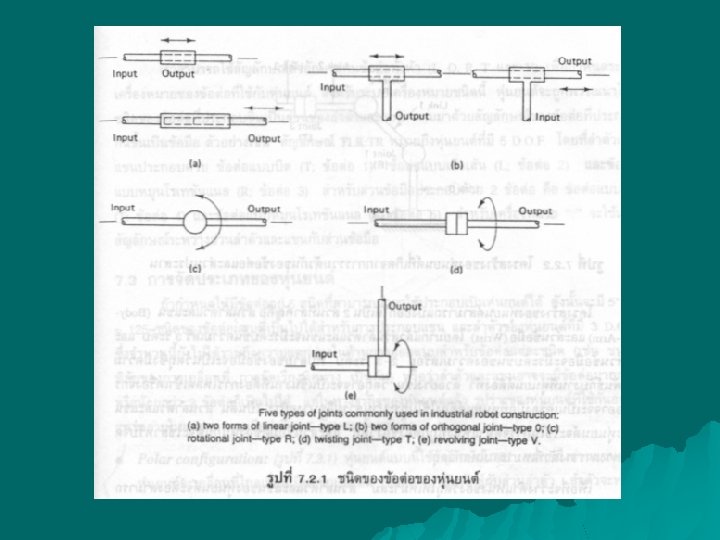
 uขอตอแบบแนวตงฉาก (Orthogonal Joint , O joint) uขอตอแบบหมนโร")
ขอตอ uขอตอแบบเชงเสน (Linear Joint , L joint) uขอตอแบบแนวตงฉาก (Orthogonal Joint , O joint) uขอตอแบบหมนโร เตชน (Rotational Joint , R joint) uขอตอแบบบด (Twist Joint , T

การเขยนขอตอลำตว : ขอตอขอมอ ตวอยาง TLR : TR

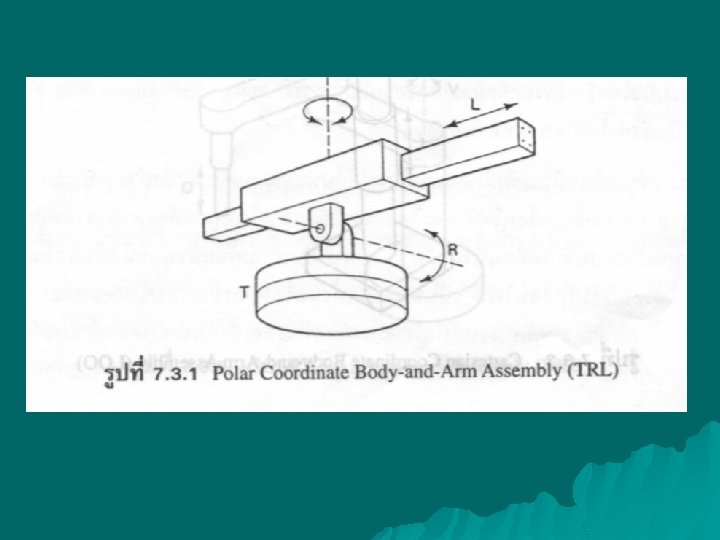
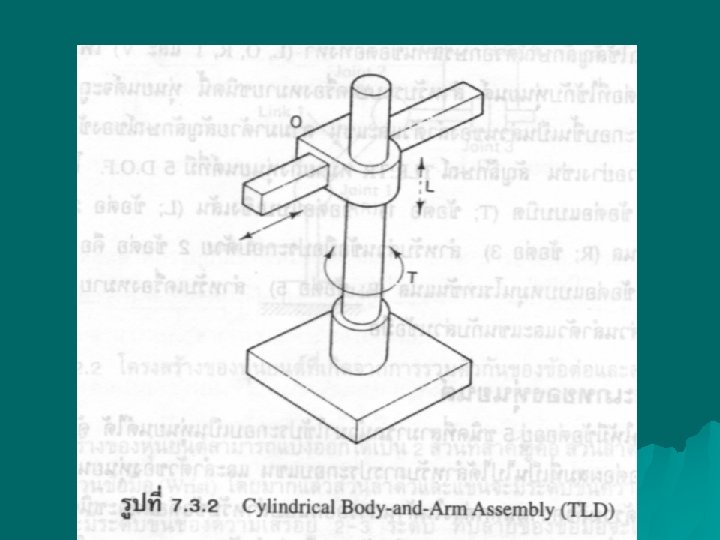
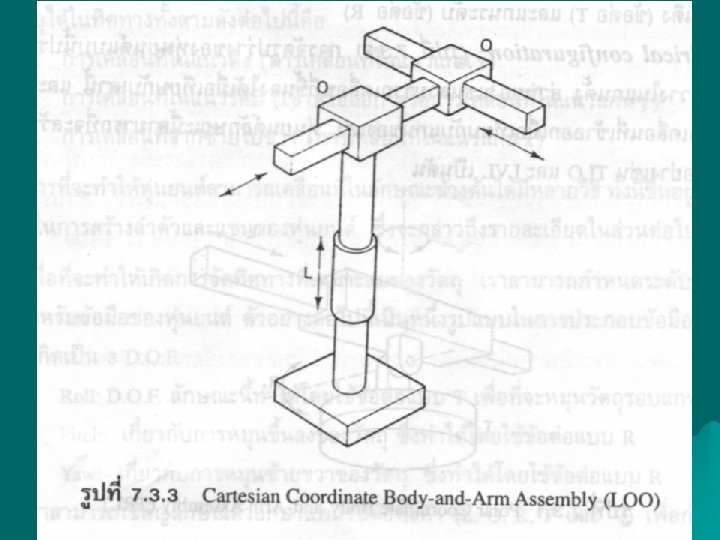
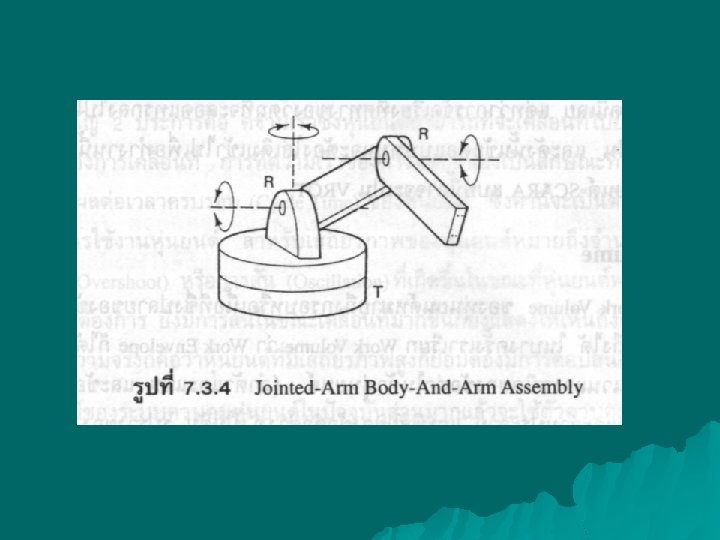
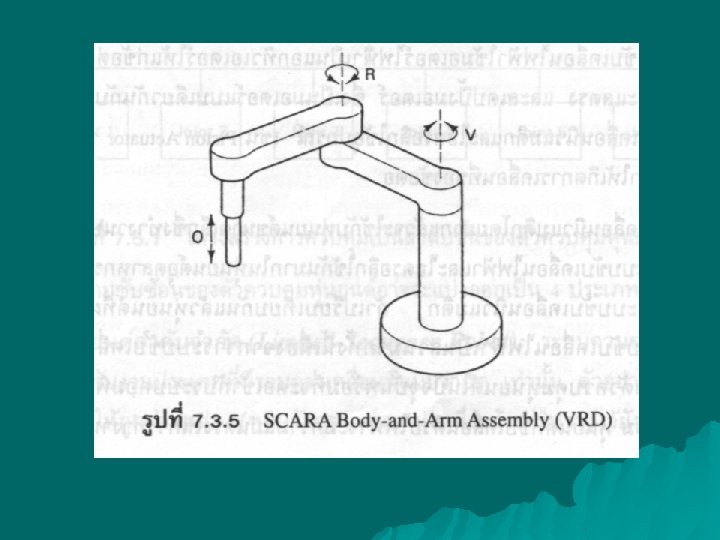
การจดประเภทของหนยน ต u. Polar configuration u. Cylindrical configuration u. Cartesian configuration u. Jointed-arm robot u. SCARA

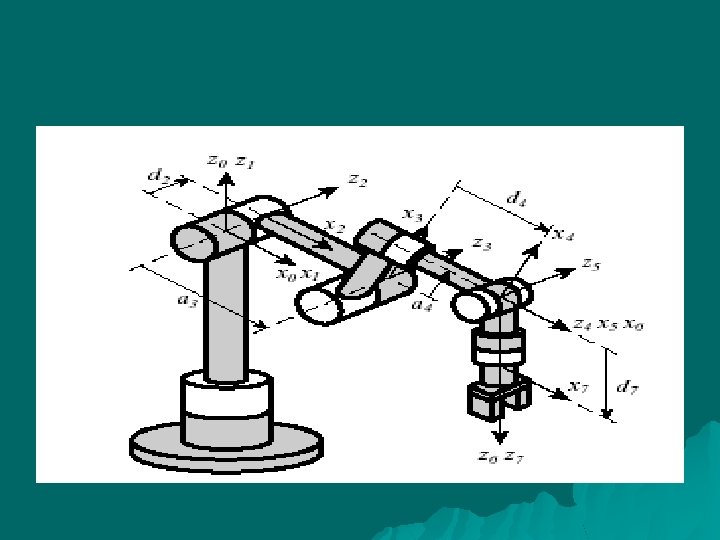
การใช frameในการคำนว ณหนยนต

เซนเซอรในหนยนต 1. Tactile Sensor • Touch sensor • Force sensor 2. 3. 4. Proximity Sensor Machine Vision หรอ Sensor เซนเซอรชนดอน ๆ Optical

End Effector
 การสอนนำโปรแกรม (Leadthrough Programming) ใชโปรแกรมภาษาหนยนตทเหมอนก")
วธการปอนโปรแกรม แกหนยนต 1. 2. 3. 4. ให จดตงดวยมอ (Manual Setup) การสอนนำโปรแกรม (Leadthrough Programming) ใชโปรแกรมภาษาหนยนตทเหมอนก บภาษาคอมพวเตอร (Computerlike Robot Programming Language) การโปรแกรมแบบออฟไลน (Off-Line Programming)

การใชงานหนยนตในอ ตสาหกรรม ลกษณะของงานทางดานอตสาหกรรม ทสงผลใหมการใชหนยนต 1. 2. 3. สภาพการทำงานทเปนอนตราย ตอมนษย งานทมรอบงานซำ งานทกอใหเกดความลำบากใน การขนยาย

การนำหนยนตไปใชงา นประเภทตาง ๆ หนาทของหนยนตทใชงา นในระบบผลตแบงไดดงน 1. เคลอนยายวสด 2. ทำงานเกยวกบกระบวนการต าง ๆ 3. ทำงานประกอบและตรวจสอบ
 2.")
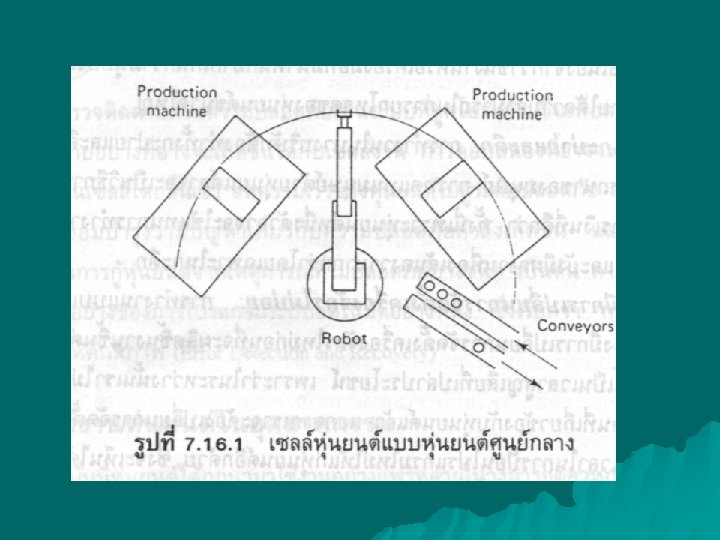
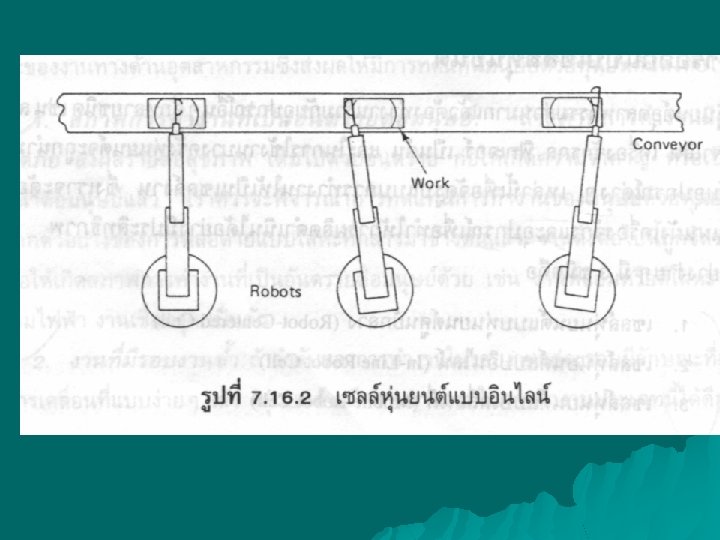
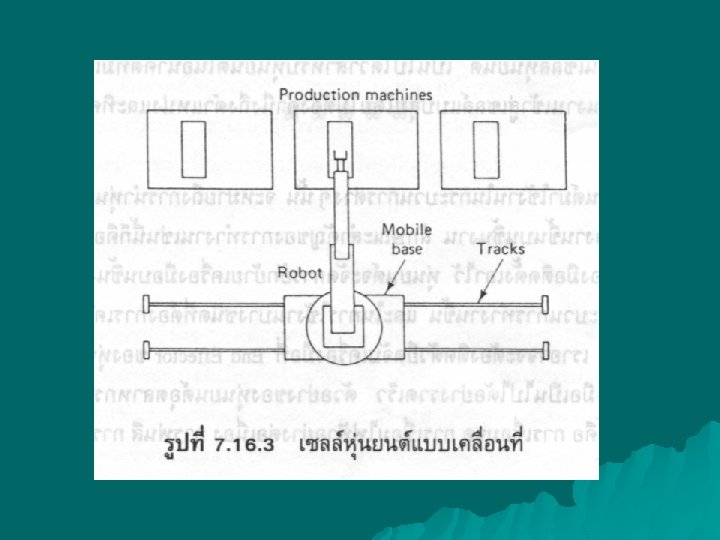
การออกแบบเซลลหนยนต แผนผงเครองจกรและอปกรณ เบองตน ม 3 ชนด คอ 1. เซลลหนยนตแบบหนยนต ศนยกลาง (Robot. Centered Cell) 2. เซลลหนยนตแบบอนไลน (In-Line Robot Cell)
 (Limited- (Playback Robot with Point-to-Point")
ระดบความซบซอนของต วควบคมหนยนต 1. หนยนตลำดบจำกด 2. หนยนตทำงานตามโปรแกรมทต งไวแบบควบคมจดตอจด Sequence Robot) (Limited- (Playback Robot with Point-to-Point Control) 3. 4. หนยนตทำงานตามโปรแกรมทต งไวแบบควบคมทางเดนตอเนอง (Playback Robot with Continuous. Path Control) หนยนตชาญฉลาด (Intelligent Robot)

ระบบขนถายวสด อตโนมต

ตารางแสดงลกษณะสมบต ของวสด ประเภท ลกษณะสมบต รปรางทางกายภา ของแขง ของเหลว พ แกส ขนาด ความยาว ความกวาง ความสง ปรมาตร นำหนกตอช น

ปจจยทเกยวของก บการเงอนไขของการขนย าย uจำนวนของวสดทตองการข นยาย uอตราการไหลทตองการ uหมายกำหนดการของการขนยาย uเสนทางทวสดใชในการขน ยาย uปจจยอน ๆ
 uตำแหนงสงวสด (Unload Station) uเสนทางเดนของวสดระหวาง สถานตาง ๆ uระยะทางทตองเดนทางเพอ")
ผงโรงงานทดควรจะให ขาวสารตอไปน uตำแหนงรบเขาหรอหยบว สด (Loading Station) uตำแหนงสงวสด (Unload Station) uเสนทางเดนของวสดระหวาง สถานตาง ๆ uระยะทางทตองเดนทางเพอ
 ผงโรงงานแบบตามกระบวนการผ")
ผงโรงงานอตสาหกรรมจ ำแนกเปน 3 ลกษณะ คอ 1. ผงโรงงานแบบตำแหนงตายต 2. 3. ว (Fixed Position Layout) ผงโรงงานแบบตามกระบวนการผ ลต (Process Layout) ผงโรงงานแบบตามผลตภณฑ (Product Flow Layout)
 uมจดรบสงโหลดตายตว uมเสนทางการสงวสดตายตว uมกจะใชสงงานเปนชน uอาศยการทำงานทางกล บางครงมการทำงานใหเปน อตโนมต uมทงการตดตงบนพนแ")
ระบบสายพานลำเลยง (Conveyor) uมจดรบสงโหลดตายตว uมเสนทางการสงวสดตายตว uมกจะใชสงงานเปนชน uอาศยการทำงานทางกล บางครงมการทำงานใหเปน อตโนมต uมทงการตดตงบนพนแ
 เปนระบบขนถายวสดทใช รถททำงานไดโดยอสระตอก น ขบเคลอนดวยตนเอง ซงถกนำทางดวยเสนทางขน สงทฝงอยบนพนโรงงาน")
ระบบ AGV (Automated Guided Vehicle System หรอ AGVS) เปนระบบขนถายวสดทใช รถททำงานไดโดยอสระตอก น ขบเคลอนดวยตนเอง ซงถกนำทางดวยเสนทางขน สงทฝงอยบนพนโรงงาน รถจะใชพลงงานจากแบตเตอร ทตดตงอยบนตวรถซ

การใชงาน AGV u. Driverless Train Operation u. Storage/Distribution System u. Assembly-Line Operation u. Flexible Manufacturing System

การนำทางและกำหนดเสน ทางเดนของ AGV 1. 2. 3. การนำทางและกำหนดเสนทา งเดนของ AGV การควบคมการจราจรและความ ปลอดภย การบรหารระบบ

การนำทางของ AGV uใชสายไฟฟาและเซนเซ อรแมเหลก uใชแถบสและเซนเซอร แสง uใชไมโครคอมพวเตอรค วบคมรอบหมนของลอ

วธการเลอกเสนทา งเดนใหแก AGV 1. วธเลอกดวยความถ 2. วธเลอกโดยการสวตซเส นทางเดน
การปองกนการชน ( 1. วธตรวจจบรถทอยขา งหนา (On-Board Vehicle Sensing หรอ Forward Sensing)")
การควบคมการจราจรและคว ามปลอดภย u Blocking)การปองกนการชน ( 1. วธตรวจจบรถทอยขา งหนา (On-Board Vehicle Sensing หรอ Forward Sensing) 2. วธการโซน (Zone Blocking)
 เรยกจากสถานทอย หางไกล (Remote")
การบรหารระบบ 1. 2. ควบคมจากแผงควบคม ทอยบน AGV (On. Board Control Panel) เรยกจากสถานทอย หางไกล (Remote

ระบบการจดเกบแล ะเรยกคนวสดอ ตโนมต
 คอ การรวมกลมของเครองมอแล ะอปกรณควบคม ซงมความสามารถในการจดกา รจดเกบ และเรยกคนวสด ดวยความเทยงตรง")
ระบบการจดเกบและเรยกคนว สดอตโนมต (Automated Storage/Retrieval System เรยกโดยยอวา AS/RS) คอ การรวมกลมของเครองมอแล ะอปกรณควบคม ซงมความสามารถในการจดกา รจดเกบ และเรยกคนวสด ดวยความเทยงตรง

ระบบ AS/RS แบงออกเปนแบบตาง u. Unit Load ดงน AS/RS u. Miniload AS/RS u. Man-on-Board AS/RS หรอ Manaboard AS/RS u. Automated Item Retrieval System u. Deep-Lane AS/RS ๆ
 2. เครอง S/R (Storage/Retrieval Machine) 3. หนวยของการเกบวสด")
องคประกอบพนฐานของระ บบ AS/RS 1. โครงสรางทเกบวสด (Storage Structure) 2. เครอง S/R (Storage/Retrieval Machine) 3. หนวยของการเกบวสด
 อปกรณตรวจสอบถงบรรจ วสดวางเปลา /เตม สถานวดขนาดโหลด")
อปกรณพเศษของระบบ AS/RS 1. 2. 3. รถเคลอนยายชองทางขนส งวสด (Aisle Transfer Car) อปกรณตรวจสอบถงบรรจ วสดวางเปลา /เตม สถานวดขนาดโหลด (Sizing

การประยกตใชระบบ AS/RS การแยกใชงานของระบบ AS/RS ออกเปน 3 ประเภทใหญ ๆ คอ 1. จดเกบและเรยกคน Unit Load 2. หยบวสดตามสง

การจดเกบวสดระหวา งกระบวนการ 1. 2. 3. 4. 5. 6. ใชเกบชดของชนงานประกอบ สนบสนนการผลตแบบ JIT ใชเปนบฟเฟอรสำหรบจดเกบว สด สามารถใชงานรวมกนกบระบบบงช ชนงานแบบอตโนมต ทำใหเกดการควบคมและการตดตาม วสดอยางมประสทธภาพ สนบสนนการทำใหเกดการทำงาน แบบอตโนมตทงโรงงาน

CAD/CAM CAE u. CAD = Computer Aided Design u. CAM = Computer Aided Manufacturing u. CAE = Computer Aided Engineer

ตวอยางการวเคราะห งานออกแบบ

ขอดของ CAD u ความรวดเรวและความเทยงตรง u ความยดหยน u ลดความขดแยงของแบบ u การเปลยนแปลงแบบ u การรวบรวมจำนวน u ความสามารถในการสรางสรรค u การจดการขอมล , การทำเปนมาตรฐาน และนำมาใชใหม

ลำดบขนการพฒนา CAD การวจย Graphic system การกำเนด ของ Interactive graphic ประยกตใชเปน Computer Aided Design การแพรหลายของ Computer Graphic การกำเนดของ CAD ใชรวมกบ CAM

ตวอยางการนำระบบ CAD ไปใชในงานอตสาหกรรม uแผงวงจร uเครองจกร –โครงสรางเครองจกร –แมพมพ uเครองบน uรถยนต uการกอสรางและงานโยธา

ขนตอนการออกแบบแผงว งจร

การออกแบบโครงสรางเคร องจกร

การเกบขอมลรปราง (การทำแมพมพ (

ขนตอนการทำแมพม พ

ขนตอนการทำแมพม พ

ขนตอนการทำแมพม พ

การออกแบบเครองบน

การออกแบบเครองบน

การออกแบบรถยนต

การออกแบบรถยนต

การออกแบบรถยนต

การออกแบบรถยนต

งานกอสรางและโยธา

งานกอสรางและโยธา
 S = T = R =")
ทบทวน การแปลงสภาพจด (2 D) S = T = R =
 Rz =")
ทบทวน การแปลงสภาพจด (3 D) Rz =

ประโยชนของการแสดงรป ราง 3มต uการตรวจสอบและพจารณารปร าง uการคำนวณพนทผวและปร มาตร uการสรางภาพหนาตด uการตรวจสอบความเหลอมลำ uการทดสอบการทำงาน

การแสดงรป 3มต u. Wire frame model u. Surface model u. Solid model

Wire frame model

วธการบนทกขอมล

Surface model

วธการบนทกขอมล
")
Solid model (B-reb)
")
Solid model (CSG)

การจดการรป u. Union u. Different u. Intersect

รปมาตรฐาน uฐานขอมล uการดงผว uการหมน

CSG กบ B-rep

เสนโคง uเสนโคง Spline uเสนโคง พาลาโบราผสม uเสนโคง Bezier uเสนโคง B-Spline uเสนโคง Non Uniform Rational B-Spline

ผวโคง uผวโคง loft Coons Bezier
f0150edb014644f224ea66570a85b24a.ppt