
ТЕМА 4 АГРЕГАТИВНЫЕ СИСТЕМЫ Содержание лекций :



 Проблема: создание")




. Не существует полного")







 выбор страты зав")



 нижнего уровня решают частные задачи по управлению единым процессом (упр-е")







 является организация функционирования")

")








 при решении многокритериальных ЗПР исп: • - теория многокритериальных ЗПР")
:")
 определяет ОДР: Т. о. требуется найти такое *)*, .")
temy_4-5_lekcii.ppt
- Размер: 471.0 Кб
- Автор:
- Количество слайдов: 45
Описание презентации ТЕМА 4 АГРЕГАТИВНЫЕ СИСТЕМЫ Содержание лекций : по слайдам
ТЕМА 4 АГРЕГАТИВНЫЕ СИСТЕМЫ Содержание лекций : 1. Понятие агрегата. Структура агрегативных систем (А-систем)
Литература • Владимир Подчукаев: Теория информационных процессов и систем: Учебное пособие. ISBN: 5 -8297 -0297 -5. Издательство: Гардарики , 2007 г. http : // www. labirint. ru / books /142949/ • Теория информационных процессов и систем Б. Я. Советов, В. А. Дубенецкий, В. • Название: Теория информационных процессов и систем Автор: Б. Я. Советов, В. А. Дубенецкий, В. Издательство: Феникс ISBN: 978 -5 -7695 -6257 -0 Год: 2010 • http : // www. centrmag. ru / book 2528930. html М. Б. Алексеева, С. Н. Балан. Основы теории системного анализа: Учеб. Пособие. СПб. : СПб. ГИЭУ, 2002. • А. В. Красов. Теория информационных процессов и систем.
4. 1. Понятие агрегата. Структура агрегативных систем (А-систем) Проблема: создание единой схемы исследования всех типов систем, а также задачи структурного и параметрического синтеза и анализа. Требования: эта схема должна иметь динамический хар-р; должна иметь связь с внешней средой; должна учитывать влияние сл факторов (т. е. в общем сл быть стохастической) Такой абстрактной схемой явл агрегат. Опишем нашу систему: Т – мн-во действит чисел, кот определяют нек мом времени t Х – мн-во входных сигналов х Y – мн-во выходных сигналов у U – мн-во сигналов управления u Z – мн-во состояний z
Агрегат – это объект, определяемый мн-вами X , Y , U , Z , T : • и случ операторами переходов H и выходов G. Случ операторы H и G определяют ф-и z ( t ) и y ( t ). Именно случ хар-р операторов переходов H и выходов G выделяет его из мн-ва других определений и описаний систем. и случ операторами переходов H и выходов G. Случ операторы H и G определяют ф-и z(t) и y(t). Именно случ хар-р операторов переходов H и выходов G выделяет его из мн-ва других определений и описаний систем.
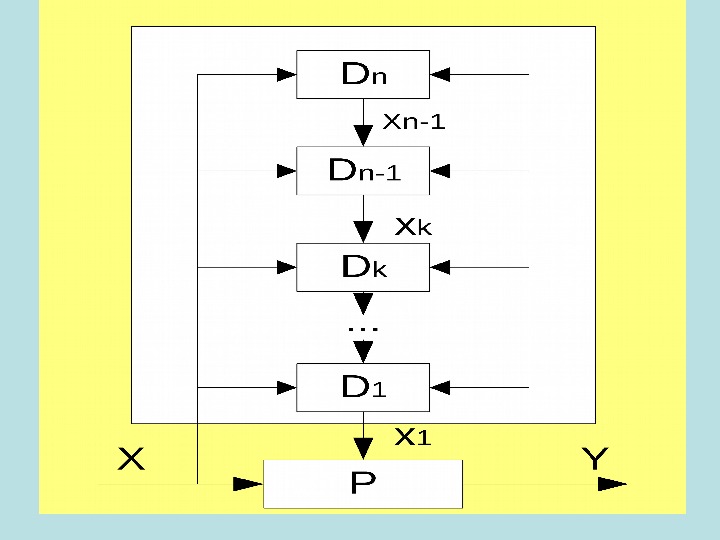
• При рассмотрении агрегатов часто упоминают в кач частных решений задач Марковские и кусочно-линейные агрегаты, где исп аппарат МСП. Понятие «Агрегат» было предложено Киевской школой. • Структура любой сложной системы: • Пусть наша сложная система состоит из ограниченного числа агрегатов (7)
• С 1, С 4 – входные полюса; • С 1, С 3, С 6 – упр полюса; • С 3, С 7 – вых полюса • Основополагающим понятием явл «полюс» . Полюс – это связь с внеш средой. • Исследование агрегативных систем как правило сводят к исследованию частных Марковских агрегатов. • Продолжение следует…
Тема 5. Иерархические системы • 5. 1. Основные типы иерархии Иерархия – это расположение частей и элементов целого в порядке от высшего к низшему. Термин «иерархия» : hieros – «священный» , arche – «власть» . Это понятие внёс Дионисий Ареопалит в 5 в н. э. Он его использовал в трактатах о небесной и церковной иерархии. И до сер 19 века это понятие исп только в христ церкви. А потом оказалось, что он удобен для описания структуры власти и особенностей бюрократии. А после появления теории систем с конца 20 века это понятие стали исп для описания систем.
• Введём понятие многоуровневой иерархической системы (для описания сложных систем). Не существует полного и сжатого определения, поэтому выделяют ряд cв-в, кот присущи многоуровневым иерарх системам: • — вертикальная соподчинённость • — право вмешательства • — взаимозависимость действий
Структура:
• Т. о. систему м. представить в виде совокупности подсистем, на входы кот поступают воздействия и с вых снимаются сигналы. • Верт соподчинённость означает, что иерархия состоит из последоваетльно расположенных вертикально взаимосвязанных подсистем, составляющих данную систему. Это понятие часто исп вместе с понятием «вертикальная декомпозиция» . Положения: • 1) не явл обязательным наличие входов для каждой выделенной подсистемы; • 2) подсистемы не обязательно связаны м/у собой на уровне соседних подсистем, т. е. связи м/у подсистемами могут носить более сложный хар-р. • Право вмешательства (приоритет действий) подсистем верхнего уровня носит для подсистем низшего уровня обязывающий хар-р.
• Взаимозависимость действий. • В конечном итоге всё, что делается подсистемой определяется эфф-тью действия подсистем низшего уровня. И для того, чтобы система была эфф-на с т. зр. её осн задачи, обязательно должна учитываться И-я, идущая снизу. • Введём ряд понятий. Они связаны и определяют особенности построения иерархических систем. • Иерархические системы могут быть нескольких уровней описания: • 1) Выделение уровней с точки зрения описания или абстрагирования (страта); • 2) Уровень сложности принимаемого решения (слой); • 3) Организационный уровень (эшелон) • Понятие «уровень» явл родовым для всех типов иерархии.
• Подсистемы высшего уровня получили название подсистем вышестоящего уровня, а низшего – нижележащего уровня. • 1. При рассмотрении любой системы возникает проблема простоты и сложности. Решение проблемы между простотой представления системы и необходимостью учёта достаточно большого количества переменных находит в иерархическом подходе к описанию системы, который сводится к созданию семейства моделей для каждого, предварительно выделенного уровня системы. На каждом уровне используются свои законы, отличные от законов других уровней, свои принципы и переменные. При выделении уровней стремятся к тому, чтобы модели, отражающие процессы уровней, по возможности были независимы. Процесс выделения по техническим, информационным и экономическим признакам (факторам) получил название стратифицирования системы , а уровни – страты.
Пример 1: страты независимы
Пример 2: автоматизированный промышленный комплекс: Страта 3: Экономическая политика Страта 2: Обработка информации и управление Страта 1: Физические процессы производства Вмешательство Управление. Обратная связь Готовая продукция
В д. сл. объект производства – нек существующий реальный продукт. Пусть это автомобиль. Для него нужно сырьё. Реализуется технический процесс, вкл в себя очень огромный набор операций. Это страта 1. Для того, чтобы всё это произвести, нужно управлять этим процессом. Здесь главное – И-я. На 3 уровне: автомобили – это экономический объект, кот может приносить прибыль или убытки, след-но, важно получить наибольшую прибыль, а остальное неважно. Это укрупнённая схема. Каждую страту можно детализировать (стратифицировать). Таких примеров можно привести много.
• Общие c в-ва стратифицированного описания систем: • 1) выбор страты зав от пользователя, его знаний и заинтересованности в ф-я системы. • 2) аспекты описания ф-я системы на различных стратах в общем случае не связаны м/у собой. Поэтому принципы и законы, используемые для хар-ки системы на любой страте, в общем сл не м. б. выведены из принципов, используемых на других стратах. • 3) на каждой страте имеется свой собственный набор терминов, концепций и принципов. • 4) понимание системы определяется при последовательном пререходе от одной страты к другой. Причём мы можем идти как сверху вниз (понимаем более детально ф-е системы), так и снизу вверх (понимаем роль системы, её значимость в целом).
• Слои определяют уровень сложности принятия решений. При принятии решения ЛПР сталкивается со следующими проблемами: – решение нужно принимать быстро – решение проблемы связано с необходимостью учёта достаточно большого количества неопределённостей, связанных с входными воздействиями и последствиями принимаемых решений. – В рамках системы принятия решений общее решение Р разделяется на ряд решений Pi , которые и называются слоями:
• Пример: производственный процесс. Проблема: максимизировать прибыль
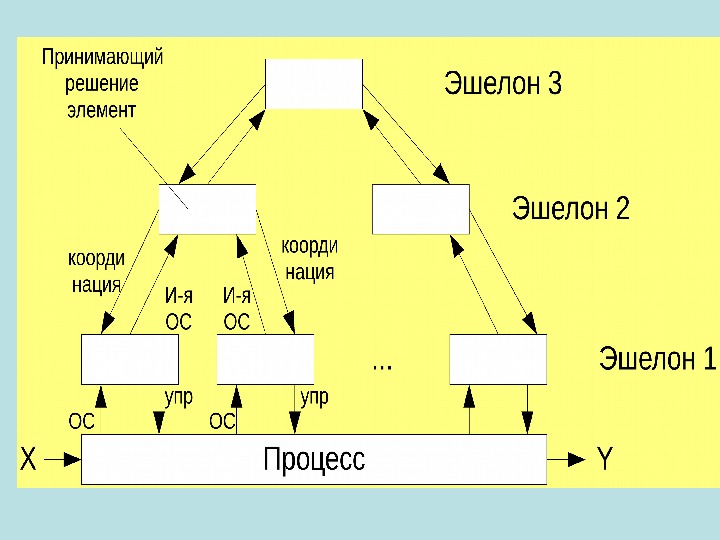
• 3. Организационный уровень предполагает учёт трёх моментов: – вся система может быть представлена в виде совокупности предварительно выделенных взаимодействующих между собой подсистем; – некоторые из подсистем представляют собой решающие элементы; – решающие элементы в рамках системы могут располагаться (и как правило располагаются) иерархически, т. е. некоторые из них нах под влиянием или управлением других решающих элементов.
• Элементы (подсистемы) нижнего уровня решают частные задачи по управлению единым процессом (упр-е станком, испыт центром, по производству единой продукции). Управление в рамках этих подсистем осущ на осн И-и, от отдельных лок эл-тов управления. И на её основе принимается решение. Но их несколько, и каждый имеет свой лок эл-т управления, т. е. стремится выполнить свою лок задачу, не обращая внимания на др. Чтобы этого не случилось, т. е. чтобы выполнить единую задачу, вводится понятие решающего элемента (принимающего решение).
Его задача: координация действий отдельных подсистем низшего уровня с целью выполнения системой поставленных перед ней задач. В свою очередь решающие элементы подчиняются решающим эл-там более высокого уровня. • Для эфф-ой работы системы в целом необходимо потребовать, чтобы каждый принимающий решение эл-т имел некоторую свободу действий.
• По хар-ру иерархического расположения образующих систему эл-тов различают следующие системы принятия решений: • одноуровневые одноцелевые системы; • одноуровневые многоцелевые; • многоуровневые многоцелевые системы. • Рассмотренная иерархия принятия решений отн к 3). Из неё можно как ч/сл получить 1) и 2):
• Пример: СУ скоростью электропривода. Цели м. б. самыми разнообразными. Несколько решающих элементов м. б. объединены в группу. Пример: производство автомобилей.
• Св-ва и хар-ки любых иерархических систем: • эл-т верхнего уровня иерархии имеет дело с более крупными подсистемами или более широкими аспектами поведения системы (чем выше поднимаемся, тем больше остаётся под нами пр-ва, с кот имеет дело след уровень иерархии. С этим можно ассоциировать процесс производства). • период принятия решения для подсистем верхнего уровня больше, чем для эл-тов или подсистем нижнего уровня (СУ предприятием: сбыт продукции – достаточный период, процесс управления производством детали – счёт идёт на секунды). • элемент верхнего уровня имеет дело с более медленными аспектами поведения всей системы.
• описания и проблемы на верхних уровнях менее структуризованы и содержат большее кол-во неопределённостей (здесь много факторов влияет, т. к. более высокий уровень структуры: это с одной стороны присутствие человека, и с др стороны отрыв от слоёв, кот работают с большим числом переменных и кот посылают меньше И-и, след-но, больше неопределённость, след-но, сложнее принимать решение. Пример: проблема автоматизации производства. Когда стали рассматривать производство как объект управления, оказалось, что даже без внедрения автоматизированных систем только за счёт просмотра всех цепочек управления эфф-ть работы увеличилась в 1, 8 раза).
5. 2. Формализация иерархических понятий • 1. Координация • Рассмотрим нек объект управления, на вход кот поступает нек вел-на х. И в д. сл. этот общий процесс разделён на ряд подпроцессов
• Pi – подпроцессы единого процесса Р i – связи подпроцессов с единым процессом • Si – подсистемы • ui – соответсвующие управляющие воздействия Si на Pi i – обратные связи, идущие от Pi на Si • S 0 – координатор. • Со стороны So на каждую из Si подаются соотв координирующее воздействие ri , а с Si на вход So подаётся соотв обратная связь i , где i =[1, n ].
• Роль координатора: целью подсистемы верхнего уровня ( So ) является организация функционирования подсистем более низкого уровня ( Si ) таким образом, чтобы была достигнута поставленная перед системой задача (Н-р, выпуск опред кол-ва продукции). Это и составляет суть понятия координации. • Каждая из Si имеет свои автономные цели, причём они при управлении единым процессом могут противоречить другу, и след-но, осн задача координатора – минимизировать последствия этого конфликта. • Связи i способствуют тому, чтобы система в конечном итоге выполнила задачу.
• В силу сказанного можно выделить 3 типа взаимодействий м/у элементами системы при выработке (определении) входов связей i : • 1) подсистемы низшего уровня решают свои локальные задачи, предполагая входы связей равными тем, кот предложила подсистема более высокого уровня, т. е. координатор So. • 2) подсистемы низшего уровня решают свои локальные задачи, предполагая входы связей, находящимися в некотором диапазоне, тоже предсказанном подсистемой более высокого уровня. • 3) каждая из выделенных подсистем Si рассматривает входы связей i как добавочные переменные, решая при этом свои локальные задачи.
• В соответствии каждому виду взаимодействий выделяют 3 способа координации: • 1) способ предсказания взаимодействий; • 2) способ оценки взаимодействий (т. к. речь идёт о диапазоне); • 3) способ баланса взаимодействий. • Если есть несколько способов координации, то встаёт проблема выбора. Для выбора исп теоретические расчёты, результаты моделирования и эвристические приёмы. • Мы рассматриваем простейший способ координации. Эту систему мы можем рассматривать как подсистему какого-то уровня. • При переходе к подсистемам более высокого уровня пользователь располагает менее точной И-ей, след-но, риск принятии того или иного решения. • Теория координации нах в нач стадии разработки.
• 2. Декомпозиция. • Декомпозиция – это расчленение системы на ряд подсистем. • Если возникает необходимость этой задачи, стараются разбить систему на ряд самостоятельных подсистем, чтобы упростить. Пример: производственный процесс как объект управления. Он очень хорошо структурирован. Разбивать можно по различным признакам. За каждым технологич процессом стоит своё технологич оборудование. Сов-ть их позволяет говорить об объекте управления различной степени сложности. Идеальной системой управления будет та, где от центра до каждого И-ого объекта будет своя цепочка управления. Но их очень много. Выход: построение иерархических систем управления.
• В ряде случаев структурированности нет, поэтому декомпозицию проводят по разным признакам: • — функциональные; • — конструктивные; • — разбиение цели на подцели (упр-е летательным аппаратом: подсистемы управления по горизонтали (в плоскости рыскания), по вертикали, вокруг своей оси) • Теория декомпозиции развивается. Она исп при создании любых сложных систем. • 3. Агрегация. • Агрегация – это операция, противоположная декомпозиции. Она предполагает сбор И-и с объектов в более общем виде, т. е. на высоком уровне. Пример: будь то руководитель предприятия: его не интересует И-я о быстродействии какого-либо оборудования, поэтому наверх эта И-я (о технологич процессе) не поступает, а поступает И-я о кол-ве выпуска, о браке и т. д.
5. 3. Модели принятия решений при управлении сложными объектами • Необходимость принятия решений возникает постоянно. Эти решения м. б. самыми разнообразными. И нужно учитывать вз-е дальних и ближних целей. Т. о. возникла новая теория принятия решении, кот базируется на множеств др теорий. Она базируется на след моментах: • наличие цели (целей) • наличие альтернатив для достижения целей • наличие ограничений, кот необходимо учитывать при достижении целей.
• Эти ограничения носят: • — экономич хар-р (ограниченные ресурсы по времени, по сырью и т. д. ), • — технический хар-р (производительность, объёмы памяти, мощность, энергопотребление, масса, габариты и т. д. ) • — социальный хар-р (требования политической и социальной целесообразности, этические и моральные нормы) • Один из осн терминов – это «операция» . Под термином «операция» понимается организованная деят-ть в любой области жизни, объединённая единым замыслом, направленная к достижению поставленной цели и имеющая хар-р повторяемости, т. е. многократности. В этом определении можно выделить: • — цель • — повторяемость • — организация
• Здесь следует отметить, что определение исходит из факта существования общего и устойчивого ряда явлений, создающих операцию, которые дают возможность построить некоторые закономерности, позволяющие в последующем поучить количественные оценки тех или иных альтернатив. • Примеры операций: • — процесс производства той или иной продукции; • — деят-ть той или иной отрасли; • — сов-ть мероприятий по отражению нападения со стороны противника. • Следующий термин – «оперирующая сторона» . Оперирующая сторона – это совокупность людей и техники, стремящихся к достижению поставленной цели. • Здесь следует отметить, что целей м. б. несколько. А также при одной цели м. б. несколько оперирующих сторон. Цели оперирующих сторон м. б. противоположны. В этом сл возникают конфликтные ситуации.
• Особое место занимают ситуации, когда в кач одной оперирующей стороны выступает природа. • Следующий важный момент: операция явл управляемым мероприятием, а управление осуществляет оперирующая сторона. Управление: оперирующая сторона выбирает те или иные виды и кол-ва ресурсов, необходимые для достижения цели. Выбор того или иного кол-ва ресурсов получил название «способа действия» . На ряду с эти термином есть «альтернатива» , «стратегия» , «решение» . • Если есть набор ограничивающих факторов, то существует много стратегий. Стратегии, удовлетворяющие формулированным ограничениям, получили название допустимых стратегий. В рамках ограничений допустимых стратегий м. б. много. Для оценки эфф-ти той или иной стратегии используют критерии оптимальности (целевые ф-и, показатели эфф-ти). Стратегия, достигающая экстремума ЦФ, получила название оптимальной стратегии. Не существует оптимальных стратегий в общем смысле, они существуют только в узком смысле.
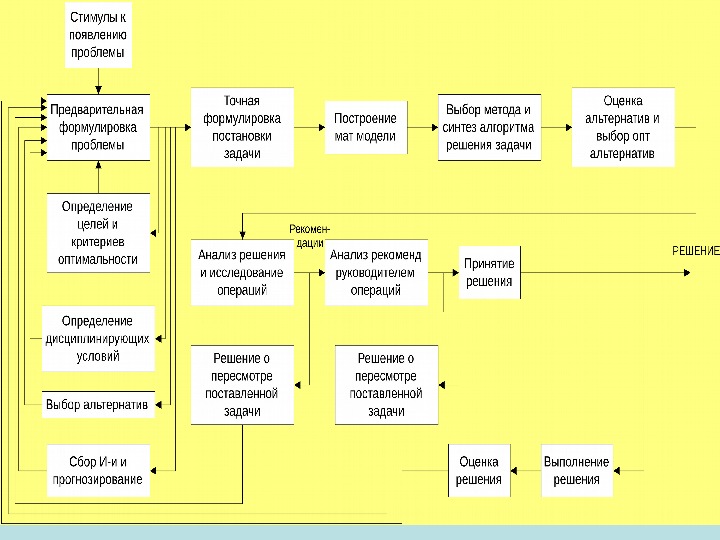
• Для получения количественной оценки задачу нужно решать. В рамках оперирующей стороны особое место занимает исследователь операции, кот иногда называется операционистом. Исследователь операций осуществляет подготовку количественных данных по оценке различных стратегий для руководителя операции, за которым стоит право принятия решения. Т. о. само принятие решения выходит за рамки теории принятия решений. • Принятию решений сопутствует разрешение достаточно большого количества проблем, кот в зав от специфики их построения можно разделить на: • 1) проблемы концептуального хар-ра : проблема носит творческий неформализуемый хар-р. И при их разрешении используются опыт, здравый смысл, логические умозаключения, интуиция и т. д. Здесь широко применяются эвристические приёмы. • 2) проблемы формально-математического и вычислит хар-ра: это все те проблемы, кот м. б. сведены к использованию существующего аппарата. Действительно, говоря о принятии решений, их необходимость возникает в разл областях жизни. Но несмотря на многообразие сфер, общий процесс принятия решений м. б. сведён к некоторой последовательности действий:
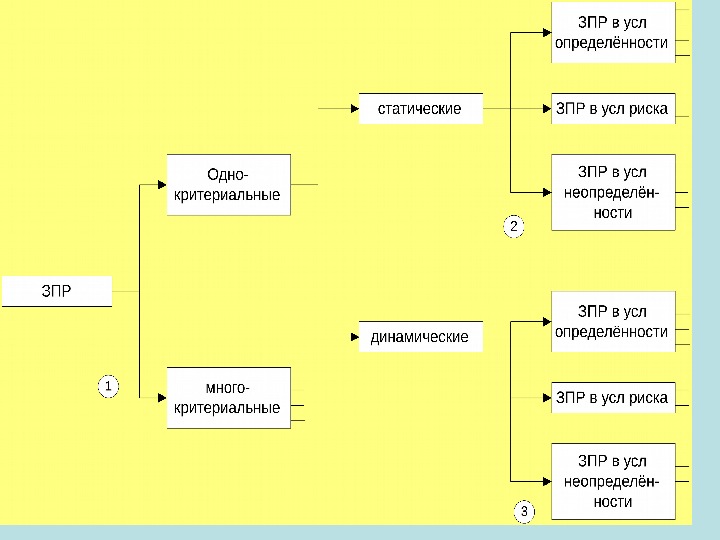
• Классификация существующих задач принятия решений • Классифицируют по различным признакам: • 1) по числу целей операции, а след-но, и критериев оптимальности: одно- и многокритериальные; • 2) учёт или наоборот непринятие во внимание временного фактора в дисциплинирующих условиях и ЦФ; • 3) наличие случайных факторов в формулировке задачи.
• 1) при решении многокритериальных ЗПР исп: • — теория многокритериальных ЗПР • — метод дерева цели • — экспертные процедуры • 2) в усл определённости: исп теория мат программирования • в усл риска: исп теория вероятностей, метод Монте-Карла (статистических испытаний), теоря мат программирования (теория игр), экспертные процедуры • в усл неопределённости: теория игр, теория статистических решений, теория минимакса и экспертные процедуры. • 3) в усл определенности: вариационное исчисление, теория оптимальных систем управления • в усл риска: теория сл процессов, статистическая динамика систем управления, экспертные процедуры • в усл неопределённости: тория диф игр, теория СП, экспертные процедуры
• Пример: • пусть рассматривается нек операция с некоторой совокупностью альтернатив (стратегий): • На компоненты этого вектора накладываются ограничения. Эфф-ть операции оценивается с помощью критерия оптимальности или ЦФ, кот тоже явл ф-ей от совокупности альтернатив: }. . . , , { 21 n xxxx mj xxxfxf njj n , 1 )2(0). . . , , ( )1(max). . . , , ()(
• Система ограничений (2) определяет ОДР: Т. о. требуется найти такое *)*, . . . *, (*21 nxxxx , принадлежащее Qx, т. е. уд-е (2), кот доставляет максимум ЦФ (1).