Презентация для консультации СЖАТ_А.ppt
- Количество слайдов: 160



Системы регулирования и обеспечения безопасности поездов на железнодорожном транспорте. Простейшая схема участков железной дороги Все системы железнодорожной автоматики и телемеханики (ЖАТ) подразделяются на перегонные, информационные и станционные. Каждая из систем подразделяется, в свою очередь, на ряд подсистем, обеспечивающих безопасное движение поездов.

Группы устройств ЖАТ

1. Перегонные системы. Путевая блокировка представляет собой систему устройств, обеспечивающих такую организацию движения, при которой занятие поездами отдельных участков пути регулируется постоянными сигналами. К ним относятся: 1. 1. ПАБ – полуавтоматическая блокировка, применяется на малодеятельных участках. Светофоры открывает дежурный по станции (ДСП), перекрываются они автоматически в результате воздействия поезда на датчики точечного типа. 1. 2. АБ – автоматическая блокировка, основной вид систем регулирования движения на перегонах.

1. 2. 1. АБПТ – АБ постоянного тока, применяется на участках с автономной тягой. 1. 2. 2. ЧКАБ – числовая кодовая автоблокировка, применяется при любых видах тяги, в основном, при электротяге. 1. 2. 3. АБТ, АБТЦ – автоблокировка с тональными рельсовыми цепями; Ц – с централизованным размещением аппаратуры. 1. 2. 4. КЭБ 1, 2 кодовая автоблокировка на электронной элементной базе. 1. 2. 5. АБ ЧКЕ микропроцессорная система числовой кодовой автоблокировки. 1. 3. Авторегулировка – это комплекс средств автоматического управления движением поездов на перегоне. Она включает в себя следующие системы: 1. 3. 1. Автодиспетчер (АД) – средства оперативной разработки графика и порядка движения. 1. 3. 2. Автомашинист (АМ) – средства автоматической регулировки скорости в соответствии с графиком. 1. 3. 3. Сигнальная авторегулировка (САР) – средства остановки поезда при сближении с препятствием. В САР как составная часть входят устройства автоматической локомотивной сигнализации АЛС.

1. 3. 4. АЛСН – автоматическая локомотивная сигнализация непрерывного действия. АЛСТ – точечного действия. 1. 3. 5. САУТ система автоматического управления тормозами. 1. 4. Вспомогательные системы: 1. 4. 1. УОП устройства ограждения на переездах. 1. 4. 2. АПС – автоматическая переездная сигнализация (на малодеятельных переездах). 1. 4. 3. АПШ – автоматическая переездная сигнализация с автошлагбаумом. 1. 4. 5. КТСМ – контроль технических средств, предназначены для контроля исправности подвижного состава. К ним также относится ПОНАБ, пункт обнаружения аварийных букс. 1. 4. 6. УКСПС – устройство контроля схода подвижного состава.


2. Станционные системы. Предназначены для регулирования движения поездов по станции и обеспечения безопасности движения. 2. 1. Нецентрализованные системы станционных устройств А и Т представляют собой такой комплекс, в котором управление и контроль станционными объектами рассредоточен в пределах станции. 2. 2. Централизованное управление стрелками и сигналами характеризуется сосредоточением органов управления, контроля и взаимного замыкания между стрелками и сигналами в одном месте (на посту централизации). 2. 2. 1. МЦ – местная централизация. 2. 2. 2. ЭЦ – электрическая централизация. 2. 2. 3. РПЦ – релейно процессорная централизация. Отличается от ЭЦ использованием процессоров. 2. 2. 4. МПЦ – микропроцессорная централизация. Элементной базой являются микропроцессоры. 2. 2. 5. ДЦ Диспетчерская централизация (ДЦ) представляет собой совокупность устройств управления стрелками и сигналами промежуточных станций в пределах диспетчерского участка. ДЦ – это кодовая система централизации, в которой все станции с центральным пунктом связаны информационными каналами связи.

2. 3. Горочные системы. Представляют собой комплекс, обеспечивающий автоматический роспуск и торможение скатывающихся отцепов на сортировочных горках. Объектами управления на горках являются: стрелки, горочный светофор, вагонные замедлители, горочный локомотив. В горочный комплекс входят: 2. 3. 1. ГАЦ – горочные автоматические централизации система автоматического перевода стрелок по маршруту следования отцепов; 2. 3. 2. АРС – система автоматического регулирования скорости скатывания отцепов (управления вагонными замедлителями); 2. 3. 3. АЗСР – система автоматического задания скорости роспуска составов; 2. 3. 4. ТГЛ – система телеуправления горочным локомотивом (т. е. реализация приказов системы АЗСР). 2. 3. 5. КГМ – комплексы горочные микропроцессорные.
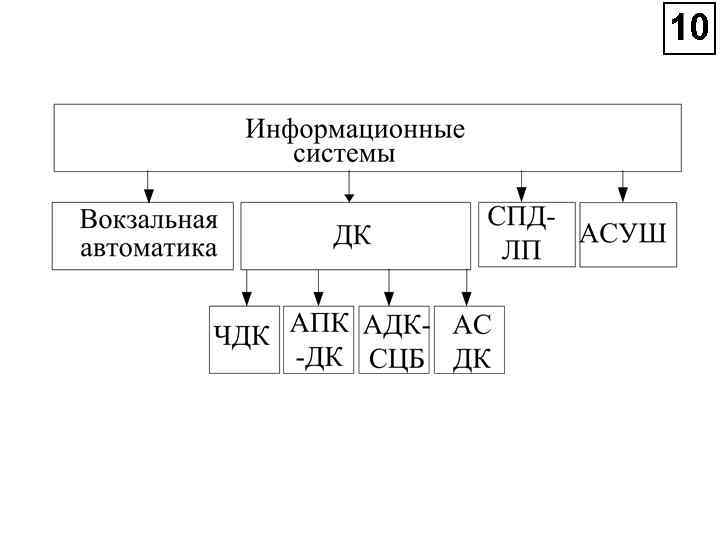

3. Информационные системы. 3. 1. ДК Диспетчерский контроль – комплекс устройств, позволяющих диспетчеру в каждый момент времени знать местонахождение поездов и положение входных и выходных светофоров на промежуточных станциях. 3. 1. 1. ЧДК – частотный диспетчерский контроль. 3. 1. 2. АПК ДК – аппаратно программный комплекс диспетчерского контроля. 3. 1. 3. АДК СЦБ аппаратно – диагностический комплекс устройств СЦБ. 3. 1. 4. АСДК Автоматизированная система диспетчерского контроля. 3. 2 Вокзальная автоматика. К ней относятся табло, справочные установки, автоматические камеры хранения. 3. 3. СПД ЛП - Система передачи данных с линейных пунктов 3. 4. АСУШ автоматизированная система управления хозяйством автоматики и телемеханики.

Объекты управления и контроля в железнодорожных системах автоматики и телемеханики В настоящее время в области оперативного управления движением поездов автоматическому управлению и контролю подлежат следующие объекты: – стрелочные переводы; – сигнальные приборы; – путевые участки; – разъединители ВВЛ АБ; – переключатели рода тока в контактной сети; – вагонные замедлители; – горочный локомотив; – буксовый узел подвижного состава; – тормозные упоры на станционных путях; – устройства контроля схода подвижного состава. ;

Схема стрелочного перевода 1 – рамные рельсы; 2 – остряки; 3 – межостряковая тяга; 4 – переходные кривые; 5 – контррельсы; 6 – усовики; 7 – сердечник. а – съезд; б – глухое пересечение двух съездов.
. Оно принимается за нормальное.")
Положение остряков стрелки, ведущее по прямому пути, называется плюсовым (+). Оно принимается за нормальное. Положение остряков, ведущее на боковой путь, называется минусовым (–). Стрелочные переводы классифицируются по маркам крестовины. Крестовины — это элементы пути, предназначенные для пересечения рельсовых нитей под некоторым углом. Мар ка крестовины (М) есть тангенс угла сходящихся на стрелке путей. Согласно ПТЭ на главных путях и приёмоотправочных пассажирских М = 1/11, грузовых М = 1/9. На сортировочных горках применяются симметричные переводы с М = 1/6. При скоростном дви же нии поездов (120 – 160 км/час) на главных путях укладывают стрелки с М = 1/18 и 1/22.

Средства регулирования движением поездов. Основными средствами регулирования движения поездов являются светофоры. Информация машинисту поезда передается в виде цветовых сигналов. красный, запрещающий движение поезда; желтый, разрешает движение с ограниченной скоростью; зеленый, разрешает движение без ограничения скорости. лунно белый, разрешает движение поездов, применяется на маневровых светофорах как разрешение маневровых работ. синий, применяется на маневровых светофорах и запрещает движение; лунно белый мигающий, применяется в качестве пригласительного сигнала; устанавливается на входных светофорах перед станцией, разрешает движение поездов с повышенной бдительностью и уменьшенной скоростью.
 устанавливаются на перегонах (на")
По функциональному назначению светофоры делятся на следующие: 1. Проходные (перегонные) устанавливаются на перегонах (на участках между станциями). основной вид светофора. или 2. Заградительные – требующие остановки при опасности для движения возникшей на переезде, крупных искусственных сооружениях, ограждении составов при осмотрах и ремонте. 3. Станционные – предназначены для регулирования движением поездов на станциях.

3. 1. поездные, регулируют движение грузовых и пассажирских поездов проходящих по станции; 3. 2. входные, устанавливаются на станциях с той и другой стороны (четного и нечетного направления). Сигнализация входных светофоров 5–ти значный светофор. запрещается вход поезду на станцию. (верхний) поезд принимается на станцию с остановкой на главном пути. поезд проследует станцию по главному пути без остановки. поезд принимается на станцию с остановкой на боковом пути.

поезд проследует станцию по боковому пути без остановки. поезд может войти на станцию по пригласительному огню с пониженной скоростью и с повышенной бдительностью машиниста. 3. 3. выходные светофоры устанавливаются с тех путей, с которых возможно отправление поезда. 3 х значный светофор, - 4 х значный светофор,

запрещается выход поезда со станции, выход разрешается с ограниченной скоростью, за станцией свободен только один контролируемый участок пути, разрешается выход со станции без ограничения скорости, разрешает выход поезду со станции, функция пригласительного сигнала, маневровый разрешающий сигнал, разрешает составу выйти в маневровом порядке.

3. 4. – маршрутные предназначены для регулирования движения поездов на станции с несколькими районами. 3. 5. Маневровые светофоры предназначаются для регулирования маневровых передвижений. разрешение маневра или передвижений, синий – запрет маневровых передвижений, значение тоже. Маневровые светофоры устанавливаются: с участков путей Нумерация порядковая, с указанием буквы М и номера. Четная горловина: 2, 4, 6 и т. д. Нечетная горловина: 1, 3, 5 и т. д.

из тупиков, с путей, с которых нет поездного светофора, в точках разветвления маршрутов.

По конструкции светофоры подразделяются на : 1. 2. 3. 4. мачтовые карликовые консольные мостиковые. мачтовые светофоры устанавливаются там, где снижается видимость светофора. Входные светофоры всегда мачтовые. карликовые светофоры устанавливаются на фундаменты, везде где позволяет видимость сигналов, кроме входных.

Устройства контроля состояния участка пути Участком пути называется часть пути, ограниченная изолирующими стыками. Информация о свободности участков пути от подвижного состава может быть получена с помощью путевых датчиков, которые подразделяются на датчики точечного типа и электрические рельсовые цепи. Схема занятия путевого участка Структурная схема оценки освобождения путевого участка

По принципу действия датчики подразделяются на: 1. механические используют изгиб, просадку, вибрацию рельса;

2. электрические – фиксируют изменение индуктивности приёмного контура при проследовании поезда, реагируют на перераспределение магнитного потока в магнитопроводе датчика при воздействии на него магнитного поля металлической массы подвижного состава;

3. оптические. реагируют на изменение интенсивности светового потока, падающего на ВЭ при прохождении подвижного состава;

Простейшая РЦ ИП – источник питания постоянного или переменного тока. R 0 –сопротивление ограничителя сигнального тока. Iс –сигнальный ток. 1 изолирующий стык (для разграничения смежных рельсовых цепей). 2 токопроводящие стыковые соединители. 3 рельсовые плети. П – путевое реле.

Классификация и область применения РЦ Рельсовые цепи различаются: 1. По роду сигнального тока 1. 1. РЦ постоянного тока (источником тока является аккумулятор, который работает параллельно с выпрямителем). 1. 2. РЦ переменного тока (50 или 25 Гц) 1. 3. Тональные рельсовые цепи 2. По режиму питания. 2. 1. Непрерывные РЦ сигнальный ток представляет собой непрерывный. 2. 2. Импульсные РЦ сигнальный ток подается в виде импульсных посылок. 2. 3. Кодовые РЦ сигнальный ток подается в виде кодовых посылок несущих информацию. 3. По типу путевого приемника. 3. 1. Одноэлементный приемник. 3. 2. Двухэлементный приемник (фазочувствительные РЦ). 3. 3. Электронные (с электронным приемником).

4. По способу пропуска обратного тягового тока. 4. 1 Однониточные. 4. 2. Однодроссельные 4. 3. Двухдроссельные.

5. Станционные рельсовые цепи. 5. 1 Неразветвленные рельсовые цепи. 5. 2. Разветвленные рельсовые цепи. 5. 2. 1. РЦ обтекаемые током. 5. 2. 2. РЦ находящиеся под напряжением Разветвлённая рельсовая цепь

4. 4. Безстыковые РЦ f 1 и f 2 – сигнальные частоты, вырабатываемые генераторами (Гf 1 и Гf 2) подключенными к рельсовой линии. Пf 1 и Пf 2 – приемники, настроенные на данные сигнальные частоты.

Основы теории рельсовых цепей. Различают три основных режима РЦ: нормальный; шунтовой; контрольный. Если РЦ исправна и свободна, то реле находится под током и режим её работы называется нормальным режимом (схема на слайде 26). Требования к нормальному режиму: Путевое реле должно находиться под током при самых наихудших условиях. Худшими условиями для нормального режима являются такие, которые препятствуют нахождению реле под током: Uип – напряжение источника питания минимальное, Zр – сопротивление рельсовой линии максимальное, Zи – сопротивление изоляции рельсовой линии минимальное.

Схема рельсовой цепи в шунтовом режиме Iсш – сигнальный ток в шунтовом режиме; Iрш - ток реле в шунтовом режиме; Iш - ток шунта. Основное требование для шунтового режима: При наложении шунта на рельсовую линию, путевое реле должно обесточиться при самых наихудших условиях для шунтового режима. Наихудшими условиями являются те, которые препятствуют обесточиванию реле. Uип – макс, Zр –мин. , Zи – макс. При этих условиях Iрш ≤ I но (ток надежного отпускания).

Схема РЦ в контрольном режиме – вносимое сопротивление в месте повреждения рельса. – сопротивление изоляции. Контрольный режим – это режим контроля повреждения рельса. Ток проходящий через реле в контрольном режиме должен быть при самых наихудших условиях для контрольного режима. Т. е. Uип – макс, Zр –мин. , Zи – критическое.

Критическим сопротивлением изоляции Zи называется такое сопротивление, при котором сопротивление передачи РЦ минимальное, при этом ток реле в контрольном режиме будет максимальным.

Работа рельсовых цепей в системе автоблокировки простейшего типа
 удельная электрическая проводимость изоляции")
Первичные параметры рельсовой линии , Сим/км (1/Ом · км ) удельная электрическая проводимость изоляции или r б, Ом х км сопротивление балласта. , Сим/км, где qи – активная составляющая проводимости, Сим/км; Сиэ – эквивалентная ёмкость для токов утечки, Ф/км; ω = 2πf – угловая частота сигнального тока, Рад/с, f – частота сигнального тока. , Ом / км удельное электрическое сопротивление рельсов. , Ом/км, где – общее активное сопротивление рельсовой петли, Ом/км; L – общая индуктивность рельсовой петли, Гн/км.

На основании измерений приняты следующие нормативные величины максимального удельного сопротивления рельсов Zp для переменного тока: 0, 8 еj 65° Ом/км при медных приварных соединителях; частотой 25 Гц – 0, 5 еj 52° Ом/км при медных приварных соединителях.

Вторичные параметры рельсовой линии γ - коэффициент распространения волны, Zв - волновое сопротивление. γ = α + jβ, 1/км. Действительная часть α характеризует затухание волны, а мнимая часть β, называемая фазовым коэффициентом, определяет степень запаздывания волны по фазе при распространении на единицу длины. γ = =| | =α+jβ, 1/км; где Zр – удельное электрическое сопротивление рельсов, Ом х км; Уи – удельная проводимость изоляции, См/км; φ – аргумент сопротивления рельсов; α = |γ|cos – коэффициент затухания; β = |γ|sin – фазовый коэффициент.

Волновое сопротивление рельсовой линии Zв = =| | , Ом О длине рельсовой линии можно судить по затуханию αl (l– длина линии), которое испытывает электромагнитная волна при своем распространении. Волновое сопротивление Zв и коэффициент распространения γ зависят от частоты: с её повышением Zв и γ в значительной степени возрастают, аргумент φ также увеличивается. В рельсовых цепях постоянного тока (ω = 0) β = 0; α = γ.

Общая схема замещения сложной РЦ в нормальном режиме. Н четырехполюсник, который замещает аппаратуру начала рельсовой цепи. Aн, Bн, Cн, Dн – коэффициенты этого четырехполюсника. РЛ – четырехполюсник, замещающий рельсовую линию. A, B, C, D – коэффициенты данного четырехполюсника. Р – четырехполюсник, замещающий аппаратуру на релейном конце рельсовой линии. Aр, Bр, Cр, Dр – коэффициенты четырехполюсника на релейном конце.

Зависимости между токами и напряжениями в начале и конце рельсовой линии представляются в виде системы уравнений: A – коэффициент снижения напряжения в режиме х. х. B – сопротивление передачи ЧП в режиме к. з. B=Zп С проводимость в режиме х. х. D – коэффициент снижения тока в режиме к. з.

Важными параметрами ЧП являются: входное сопротивление ЧП где сопротивление нагрузки ЧП; сопротивление передачи ЧП Коэффициенты ЧП в зависимости от первичных и вторичных параметров рельсовой линии в нормальном режиме.

Расчет нормального режима РЦ Цель расчета расчет U, I и P источника питания Расчет производится при известных напряжениях и токах на путевом реле Uр и Iр. 1. Определяется ток и напряжение в конце рельсовой линии 2. Рассчитываются значения напряжения и тока в начале рельсовой линии . 3. Рассчитываются значения напряжения и тока источника питания. При расчете нормального режима задаются изменяющимися параметрами, такими как: сопротивление изоляции длина рельсовой линии. изменяется из за погодных условий.

По результатам расчетов строятся регулировочные характеристики.

Расчет шунтового режима. Шунтовая чувствительность – это максимальное сопротивление, при наложении которого на рельсовую линию надежно отпадает (при непрерывном питании) или надежно не притягивается (при импульсном и кодовом питании) якорь путевого реле. Rш. пр предельная шунтовая чувствительность Rш. н. = 0, 06 Ом – нормативная шунтовая чувствительность Rш. пр ≥ Rш. н. Шунтовая чувствительность рельсовой цепи характеризуется коэффициентом шунтовой чувствительности Зависимость шунтовой чувствительности.

Aшк, Bшк, Cшк, Dшк – коэффициенты четырехполюсника в шунтовом режиме при наложении шунта в конце РЛ. Aшн, Bшн, Cшн, Dшн – коэффициенты четырехполюсника в шунтовом режиме при наложении шунта в начале РЛ. Uр. ш=Uр. н. о. Iр. ш=Iр. н. о. Рассчитываются Uп. ш. , Iп. ш. – напряжение и ток источника питания при шунтовом режиме. Сравнение с напряжением и током источника питания при нормальном режиме (Uп. н. , Iп. н).

Расчет контрольного режима. Схема замещения РЛ при контрольном режиме сопротивление изоляции критическое численно равно длине рельсовой линии. вносимое сопротивление в месте повреждения рельса Коэффициенты рельсового ЧП в контрольном режиме – Aк, Bк, Cк, Dк. Расчет проводится при следующих условиях: Uр. к. =Uр. н. о. Iр. к. =Iр. н. о. Определяются значения Uп. к и Iп. к. и сравниваются с Uп. н и Iп. н. в нормальном режиме. Рассчитывается коэффициент контрольного режима
 ДСП – дежурный по")
Системы регулирования движения поездов на перегонах Схема полуавтоматической автоблокировки (ПАБ) ДСП – дежурный по станции; ДНЦ – поездной диспетчер.
 – применяется на участках с малой интенсивностью движения и при любом")
Полуавтоматическая автоблокировка (ПАБ) – применяется на участках с малой интенсивностью движения и при любом виде тяги. При ПАБ рельсовые цепи на перегонах отсутствуют, следовательно контроль положения поезда и исправности рельсов не осуществляется. Недостатки ПАБ: низкая интенсивность движения, т. к. на перегоне может находиться только один поезд отсутствие контроля перегона. При наличии блок постов интенсивность движения увеличивается в 2 раза. Для того чтобы проконтролировать движение поезда в полном составе применяется система контроля перегона ЭССО (электронная система счета осей). Основные достоинства ПАБ: малогабаритная, недорогая, надежная, потребляет мало электроэнергии. Пропускная способность зависит от времени занятости пути и от скорости движения поезда по перегону.
 – система интервального регулирования движением поездов, в которой межстанционный перегон делится")
Автоматическая блокировка (АБ) – система интервального регулирования движением поездов, в которой межстанционный перегон делится на блок участки, каждый из которых ограждается светофором, действующим в автоматическом режиме. 1. 2. Задачи решаемые применением АБ: Воздействие поезда на сигнальные показания светофора, что достигается с помощью рельсовых цепей. 2. Увязка сигнальных показаний попутных светофоров между собой, что достигается с помощью каналов связи.

Классификация систем АБ 1. По путевому развитию. 1. 1. Однопутные. 1. 2. Двухпутные. 2. По направлению движения. 2. 1. Односторонняя – движение поездов производится по одному пути в одном направлении. Применяется на двухпутных участках. 2. 2. Двухсторонняя – движение производится по одному пути в обоих направлениях. Применяется на однопутных участках и на двухпутных при ремонте одного из путей. 3. По роду сигнального тока в РЦ. 3. 1 Постоянного тока – применяется на участках с автономной тягой. 3. 2. Переменного тока – а) 50 Гц – при электротяге постоянного тока, б) 25 Гц при электротяге переменного тока. 50 Гц, 25 Гц – частота сигнального тока.

4. По способу передачи информации. 4. 1. проводные (информация передается по линейным цепям, проводам, кабелям) а) АБ постоянного тока; б) АБ с тональными РЦ. 4. 2. кодовые (информация передается по РЦ в виде кодовых посылок) 5. По размещению аппаратуры. 5. 1. Размещение аппаратуры в релейных шкафах сигнальных точек. а) АБ постоянного тока; б) кодовая АБ. 5. 2. АБ с централизованным размещением аппаратуры – АБ с тональными РЦ (АБТЦ). При АБТЦ аппаратура размещается на станциях, это улучшает условия её обслуживания. 6. По элементной базе. 6. 1. релейные системы, (построение схем выполняется на реле) 6. 2. электронная АБ, когда схемы выполнены на бесконтактных элементах. К ним относятся электронно кодовая и микропроцессорная АБ. 7. По принципу разграничения поездов. 7. 1. двухзначную, 7. 2. трёхзначную, 7. 3. многозначную.

Двухзначная система АБ l=l 1 Б. У П П 1 3 Б. У Т П М М св. 1 3 Б. У 1 Б. У 2 l. Б. У LМ. П = 2 l Б. У + l П, где l Б. У – длина блок участка; l П – длина поезда. П 3 св. 3 5 Б. У

Трёхзначная система АБ 1 Б. У. 5 Б. У. 3 Б. У. П 3 П Л 1 l Б. У ≥ lт. макс П 3 М П П 1 Л 1 М Л 3 П L МП = 3 l Б. У + l. П М св. 3 св. 1 3 Б. У. 1 Б. У. з 3 l. T LМ. П 5 Б. У. ж 7 Б. У.

Четырёхзначная система АБ 1 Б. У. 3 Б. У. 5 Б. У. П 3 Л 1 П П 1 П 5 7 Б. У. П М Л 1 М св. 1 3 Б. У. 1 Б. У. з 5 Б. У. 4 l. Т 7 Б. У. 9 Б. У. ж LМ. П Используется четыре сигнальных показания: красное, жёлто зелёное, зелёное. Одновременно горящие жёлтый и зелёный огни оповещают машиниста о красном огне за два блок участка. Остановка любого поезда перед светофором с красным огнём гарантируется при условии: LТ ≥ 2 LБ. У. Движение поездов на зелёный огонь светофора обеспечивается при минимальном межпоездном интервале: LМП = 2 l. Б. У + l. П.
 ДК – декодер (дешифратор)")
АБ постоянного тока К кодер (кодирующая схема) ДК – декодер (дешифратор)

Схема рельсовой цепи ВАК выпрямительный агрегат купроксный АБ аккумуляторная батарея МТ маятниковый трансмиттер Rо – сопротивление ограничителя ПР – путевое реле ДШ –дешифратор П – основное путевое реле

Построение линейных цепей в импульсно кодовой АБ Л линейное реле С сигнальное реле ЛЦ линейная цепь О – огневое реле

Управление светофором

Управление предвходным светофором

Особенности схем однопутной АБ постоянного тока Изменение направления производится с помощью специальных схем, которые называются схемами смены направления движения. При смене направления движения выполняются следующие требования: 1. перегон должен быть свободным; 2. маршруты отправления не должны быть установлены; 3. выходные светофоры со станции должны быть закрыты; 4. в схеме смены направления движения должен быть осуществлен контроль наличия «ключа жезла»

Схема переключения рельсовых цепей

Схема переключения линейных цепей

Схема переключения светофоров

Н, ОН – провода направления движения, К, ОК – провода контроля состояния перегона.

Кодирование рельсовой цепи постоянного тока кодами АЛСН – автоматическая локомотивная сигнализация непрерывного действия. КТ кодовый трансформатор П – контакт основного путевого реле И импульсное путевое реле Т – контакты трансмиттерного реле

Сигнальные показания при АБ. Выбор кодов в автоблокировке постоянного тока КПТ – кодовый путевой трансмиттер, Т трансмиттерное реле А – аварийное реле, О – огневое реле Д электродвигатель, Р редуктор

Временные диаграммы кодов КПТ Ж Характеристики КПТ различных типов КПТ используются для формирования кодов числовой кодовой автоблокировки.
 Применяется на участках с электротягой, причем при электротяге постоянного тока")
Числовая кодовая автоблокировка (ЧКАБ) Применяется на участках с электротягой, причем при электротяге постоянного тока применяется ЧКАБ частотой сигнального тока в РЦ f = 50 Гц, при электротяге переменного тока РЦ имеют частоту сигнального тока f = 25 Гц. Схема кодовой рельсовой цепи ПТ – питающий трансформатор; ИТ – изолирующий трансформатор; ПФ – полосовой фильтр предназначенный для защиты путевого реле от гармоник тягового тока; ИП – импульсное путевое реле.

Функциональные связи в системах кодовой АБ. К – устройство кодирования, ДК – устройство декодирования (дешифрации). Устройство декодирования ДК принимает код из рельсовой цепи, расшифровывает его и включает на светофоре соответствующее показание и передает на информацию на устройство кодирования. Кодирующее устройство К воспринимает эту информацию и зашифровывает информацию о состоянии светофора.

Упрощенная схема числовой кодовой автоблокировки. 1 Р. Ц. 1 ИП «з» 1 «ж» ж 1 ИП 3 Р. Ц. 3 ИП 1 Т 3 «кж» ж 3 ИП ДА ДЯ з з Т ж С ж 5 ИП ДЯ з з 1 Т КПТ 5 Р. Ц. 5 ИП 3 Т ж з 3 Т КПТ з ж РШ 3 з ж КПТ з ж РШ 3 з РШ 5 ДА – дешифратор автоблокировки выполнен в виде 3 х блоков. БС ДА – блок счетчиков, содержит реле, которое считает импульсы и интервалы кода. БИ ДА – блок исключения, предназначен для исключения появляющихся разрешающих показаний при к. з. изолирующих стыков. БЗ ДА – создает замедление на отпускание сигнальных реле (З, Ж).

Если в РЦ коды отсутствуют, импульсно –путевое реле обесточено, на светофоре В рельсовую цепь перед этим светофором подается код КЖ. В РЦ код КЖ: импульсное реле И работает, З – обесточено, Ж – под током, на светофоре показания В рельсовую цепь перед этим светофором подается код Ж. При приеме кода Ж оба сигнальных реле встанут под ток и включат на светофоре зеленый огонь. В РЦ перед этим светофором будет подан код З. При организации двустороннего движения поездов с помощью схем изменения движения производится переключение светофоров и рельсовых цепей.

Схема приема информации от АЛСН на локомотиве

При вступлении поезда на РЦ колесная пара шунтирует её, и тогда сигнальный ток в РЦ замыкается через колесную пару и протекает под приемными катушками (ПК) локомотива. Это является режимом АЛСН. Основное требование к этому режиму следующее: ток локомотивной сигнализации IАЛСН должен быть достаточен для надежной работы локомотивной аппаратуры. Сигнал с катушек подается на локомотивный усилитель (ЛУ). Локомотивный усилитель осуществляет автоматическое регулирование уровня принимаемого сигнала. На выходе локомотивного усилителя включено импульсное реле (ИР), которое работает в режиме принимаемого кода. Локомотивная аппаратура содержит скоростемер (СК). Он измеряет фактическую скорость движения поезда. Для проверки способности машиниста вести поезд имеется рукоятка бдительности (РБ).

Информация с пути, значение скорости, а также информация о состоянии машиниста передается на локомотивный дешифратор (ДШ). Он управляет локомотивным светофором (ЛС). Этот светофор пятизначный: зеленый, желтый, красно желтый, красный, лунно белый. Значения сигнальных показаний: Зеленый – на впереди расположенном светофоре горит зеленый огонь. При данном показании светофора контроль скорости и бдительности машиниста не производится. Желтый – на впереди расположенном светофоре горит желтый огонь. При этом контролируется установленная скорость движения поезда Vж с желтым огнем на локомотивном светофоре. Если фактическая скорость поезда Vф не более контролируемой (т. е. Vж≥Vф), то бдительность машиниста не проверяется. Если же Vф≥Vж, то проверяется бдительность машиниста. Контроль бдительности производится путем периодического нажатия рукоятки бдительности. Если этого не происходит, то ДШ выключает электро пневматический клапан (ЭПК), который открывает тормозную магистраль (ТМ) и производится экстренное торможение поезда.

Красно желтый – на впереди расположенном светофоре красный огонь. При этом контролируется допустимая скорость Vкж и бдительность машиниста. В том случае если Vф превысит допустимую скорость или машинист не подтвердит своей бдительности, происходит экстренное торможение (через 6 с). С переходом сигнала на менее разрешающий ЭПК издает звуковой сигнал и машинист должен подтвердить понимание сигнала РБ. Красный – поезд прошел светофор с запрещающим сигналом. При этом должна быть снижена скорость поезда до 20 км/ч, иначе произойдет экстренное торможение поезда. Лунно белый – появляется на локомотивном светофоре, когда поезд проходит светофор с разрешающим показанием и вступает на неконтролируемый участок. Он означает, что локомотивные устройства работают исправно. При этом контролируется бдительность машиниста – он должен через 60 с. нажимать на РБ.
 имеет")
ТОЧЕЧНАЯ СИСТЕМА АЛСТ Применяется на подходах к станциям при ПАБ. Путевой индуктор (ПИ) имеет два контура, настроенные на частоты f 1 и f 2. Подключение их осуществляется контактами линейного реле, питаемого со стороны входного светофора: светофор закрыт, f 1; светофор горит Ж, f 2; светофор горит З, f 1 , f 2.

Локомотивный индуктор ЛИ имеет также два контура с частотами f 1 и f 2, два генератора Г 1, Г 2 и два импульсных реле 1 И, 2 И, нормально находящиеся под током. При проходе ЛИ над ПИ в результате взаимодействия их электромагнитных полей соответствующие реле И обесточиваются и кратковременно включают огонь на локомотивном светофоре. Вторая контрольная точка сооружается на расстоянии 400 м от входного светофора, кроме основного она имеет дополнительный индуктор. Работа системы повторяется, дополнительно загорается буква «С» . Основной недостаток устройств АЛС состоит в том, что они не предотвращают проезд поездом светофора с запрещающими показаниями.
")
Система автоматического управления тормозами (САУТ)

САУТ предназначена для предотвращения проезда светофоров с запрещающими показаниями. Она работает совместно с устройствами АЛСН. САУТ получает информацию от АЛСН, обрабатывает её, регулирует скорость движения поезда и обеспечивает остановку поезда перед запрещающим светофором с точностью до 50 м. Локомотивные устройства САУТ содержат две бортовых ЭВМ. Обе машины работают параллельно. Решение о торможении поезда или регулирования скорости принимается тогда, когда обе машины выдают одинаковую информацию. В случае разногласия система отключается. Этим обеспечивается надежность и безопасность применения системы. Обе ЭВМ получают информацию с датчиков о фактической скорости и пройденном пути. Также ЭВМ получают информацию от антенны расположенной с правой стороны локомотива над рельсом. Она подает на ЭВМ частотные сигналы – эти сигналы и есть сигналы САУТ. Кроме того ЭВМ получают сигналы от системы АЛСН (т. е. кодовые сигналы). Обработав эту информацию ЭВМ принимает решение о разгоне или торможении поезда.

В составе локомотивных устройств имеются устройства диагностики, устройства индикации, на которых высвечиваются значения пройденного пути S и допустимый резерв скорости Δ V, пульт управления, с помощью которого машинист управляет процессом движения поезда. Вся информация о впереди расположенных участках пути записывается в блок локомотивных приемников (БЛП). Объем информации такой что обеспечивается движение поезда по всему маршруту. БЛП управляет речевым синтезатором, который предупреждает машиниста о препятствии. Например: Внимание впереди тоннель, переезд, станция и т. д.

Программная и фактическая скорость движения поезда ГП – непрограммируемые генераторы; ГПП – программируемые генераторы.

Выходы генераторов подключаются к правому по ходу движения рельсу. Этот рельс называется шлейфом. Информация кодируется длиной шлейфа lш, частотами или комбинациями частот генератора fг. Генератор устанавливается у предвходного сигнала и передает информацию пропорционально lб/у. У входного светофора генератор передает информацию о виде маршрута: прием на главный, боковой и т. д. ; о расстоянии до точки ограничения скорости; о расстоянии до выходного светофора. На выходе со станции устанавливается программируемый генератор ГПП. В него записывается номер перегона. Этот номер передается с помощью кодовых сигналов на локомотив. ГП управляются с поста электрической централизации, т. е. осуществляется выбор комбинаций частот. ГПП – не управляемый генератор. Когда локомотив проходит точку где установлен ГПП, на локомотивные устройства подается код номера впереди расположенного перегона. ЭВМ выбирает из БП все сведения об этом перегоне и регулирует скорость движения в соответствии с прочитанными данными.

1. 2. 3. Недостатки САУТ Ц: Система воспринимает информацию с АЛС. Если информация не совпадает (анализируется в пункте индикации и диагностики), систему выключает машинист. 2. Перемычки к рельсам устанавливаются строго под прямым углом на расстоянии 1 м. При установке проверяется грунт на наличие металлических предметов, которые следует удалить. 3. При отказе генераторов: ГПН(ГПШ) – генераторы взаимозаменяемые; ГППН(ГППШ) – 19, 6 к. Гц – проектируются в релейном шкафу, приписаны на станцию и невзаимозаменяемые (закодирован номер перегона). 4. Сбои САУТ Ц: при расследовании надо знать ∆V, показания локомотивного и напольного светофоров, место сбоя, сведения о маршруте (на станции). 5. Длины шлейфов должны иметь строго определенные значения, что вызывает неудобства при подключении генераторов к рельсам; 6. При замене рельсов процесс подключения генераторов производится заново. Более современной системой является САУТ М. В этой системе используются только программируемые генераторы. Т. е. вся информация кодируется при помощи кодовых импульсов.
, предназначен для передачи информации о поездной ситуации дежурным по станции ДСП")
Диспетчерский контроль (ДК), предназначен для передачи информации о поездной ситуации дежурным по станции ДСП и поездным диспетчерам ДНЦ, а также информации о состоянии устройств ж. д. автоматики дежурному персоналу дистанции СЦБ (дежурный инженер дистанции ШЧИД). Система ДК двухуровневая. Первый уровень – это передача информации с перегонов на промежуточные станции. Здесь ДСП видят движение поездов на прилегающих к этой станции перегонах. Кроме этого ДСП контролируют состояние путей на станции. Второй уровень – передача информации с промежуточных станций на центральный пост, т. е. поездному диспетчеру ДНЦ. Информация о состоянии СЦБ, связи и др. передается дежурному инженеру дистанции, туда, где расположены ШЧ. По имеющейся информации ШЧИД определяет состояние устройств и принимает решение об устранении неисправностей.
 разработка КБ ЦШ")
В настоящее время широко распространены две системы: частотный диспетчерский контроль (ЧДК) разработка КБ ЦШ (1966 г. ) и аппаратно программный комплекс диспетчерского контроля (АПК ДК). Кроме того активно внедряется система АДК СЦБ. Исходной информацией является информация, передаваемая с сигнальных точек. На сигнальных точках установлена аппаратура контроля сигнальной точки. В ЧДК – это генераторы электронные типа ГКШ (генератор камертонный со штепсельным включением), выдающие частотный сигнал, передаваемый на промежуточную станцию. Генераторы работают в диапазоне частот от 300 до 1500 Гц. В этом диапазоне расположено 16 частот от f 1 до f 16. Т. К. диапазон сравнительно узкий, требуется высокоточная настройка генератора и высокая стабильность частоты. Это достигается включением в задающий каскад генератора камертонного фильтра. Опрос сигнальных точек ЧДК является непрерывным, что позволяет регистрировать местонахождение поезда на перегоне, движущегося с любой практически реализуемой скоростью.

Структурная схема генератора ГКШ В – выпрямитель, преобразующий переменное напряжение в постоянное; СФ сглаживающий фильтр, предназначен для сглаживания выпрямленного напряжения; ГКФ – задающий каскад генератора с камертонным фильтром; У – усилитель – это выходной каскад генератора. Он управляемый, на него подается управляющий сигнал со схемы кодирования СК. Форма сигнала будет зависеть от состояния сигнальной точки. ТР 1 – служит для разделения каскадов генератора; ТР 2 – для согласования с линией передачи информации и как изолирующий трансформатор; Через схему СК на выходной усилитель через выпрямитель подается питание.

Схема кодирования информации в системе ЧДК Ж – контакт сигнального реле Ж. Если участок занят, то реле Ж обесточено. При помощи контактов реле Ж передается информация о свободности или занятости контролируемого б/у. О – контакт огневого реле, который контролирует состояние включенной лампы светофора (чаще всего красного). Если лампа исправна, то реле О под током, если неисправна, то О обесточивается. А – аварийное реле, которое контролирует основное питание сигнальной точки. А 1 – контакт аварийного реле контролирующего наличие резервного питания на сигнальной точке. ДА – дешифратор автоблокировки. 1 – контакт первого счетчика дешифратора автоблокировки.

Применение частотного принципа контроля объектов позволило расширить функции ДК, возложив на него ещё обязанности диагностической системы. Так, манипулируя работу задающего каскада ГК с помощью некоторых контрольных контактов, можно передавать на станцию дополнительную информацию, например, о перегорании лампы красного огня, отсутствии основного и резервного питания, неисправности ДЯ и др. Информация на промежуточную станцию передается по линии ДСН (прямой провод) – линия двойного снижения напряжения и ОДСН (обратный провод). Структурная схема первого уровня ЧДК Информация передается одновременно со всех сигнальных точек. Для разделения информации используется импульсно частотный признак. На каждой промежуточной станции в составе аппаратуры ЧДК имеются приемники ПК 1÷ПК 16 (приемник камертонный). Приемники принимают сигналы от генераторов ГКШ и управляют индикацией на табло ДСН. Содержание информации будет зависеть от состояния сигнальных точек. Информация с сигнальных точек формируется схемами кодирования. Источниками кодов являются кодовые путевые трансмиттеры.

Схема приема информации в системе ЧДК Содержание сигналов: 1. Если на сигнальной точке все исправно и блок участок свободен на У подается непрерывное питание, а в линию ДСН поступает непрерывный сигнал. На станции приемник ДК принимает этот непрерывный сигнал и на выходе приемника реле Р находится под током. Лампочка на табло ДСП выключена. 2. Если блок участок занят, реле Ж обесточено, счетчик 1 также обесточен. Цепь питания У размыкается и сигнал в линию ДСН не передается. На станции соответствующий приемник не будет принимать сигнал и реле на его выходе обесточится. На табло включится лампочка красного цвета, которая соответствует контролируемой сигнальной точке. 3. Если реле Ж находится под током, т. е. б/у свободен, но перегорит лампа красного огня, то питание на У будет поступать в коде КЖ. На табло появится соответствующая индикация (лампочка мигает в соответствии с кодом).

4. Кроме этого проверяется исправность состояния ДА. Если ДА неисправен, то реле Ж обесточено, при этом информация будет передаваться через контакт счетчика 1. Сигнал передаваемый в линии ДСН, будет последовательно меняться, т. к. счётчик 1 работает в коде КЖ, Ж или З по мере удаления поезда. По миганию лампочки у ДСП можно судить о характере неисправности на сигнальной точке.

II уровень ДК – передача информации со станции на центральный пост Информация на центральный пост с промежуточной станции передается с помощью линейных генераторов (ЛГ). При этом используются 15 частот f 1÷f 15, а f 16 применяется для работы тактового генератора. Частотные сигналы передаются с промежуточных станций в линию диспетчерского контроля ДК ОДК. Поскольку с каждой станции передается информация о состоянии 32 х объектов (16 – перегонных, 16 – станционных) и к линии ДК может подключаться 15 станций, то общий объем контролируемых объектов равен 32 х 15 = 480.

ГК камертонные генераторы, устанавливаются в на перегонах в релейных шкафах контролируемых сигнальных точек. Генераторы с более высокой частотой располагаются ближе к станции. Табло ДСП – табло дежурного по станции. У – усилители, усиливают принимаемые сигналы из линии ДСН. П – приемники диспетчерского контроля. ПК – камертонные приемники. Каждый настроен на свою частоту. Р – распределитель. РДК – распределитель диспетчерского контроля. Приемники подключаются к Р и Р опрашивает состояние приемников. К Р подключаются контакты контрольных реле (КР), контролирующих состояние объектов на станции (пути, стрелки, светофоры). Распределитель по очереди опрашивает эти объекты. К одному Р могут быть подключены 32 объекта (16 П и 16 КР). Распределители работают в пошаговом режиме под управлением блока управления распределителем (БУР). Устанавливаются БУР на каждой станции, как и Р. Р работают синхронно и синфазно на всех станциях.

Синхронность обеспечивается подачей тактовых импульсов. Эти тактовые импульсы подаются в линию диспетчерского контроля ДК и ОДК от тактового генератора ГТ. От этих импульсов работают БУР, которые в свою очередь управляют работой Р на всех станциях. Синфазность работы Р необходима для того, чтобы на каждом шаге к Р подключались одноименные объекты. Синфазность обеспечивается тем, что после 32 шага Р формируется длинная пауза, в течении которой распределители на всех станциях приходят в исходное состояние. Это называется цикловой синхронизацией. ГТ может располагаться на любой станции, при этом должен быть обеспечен уверенный прием тактовых импульсов по всему участку (чаще всего на середине участка или на центральном пункте). ГТ работают на самой высокой частоте f 16. Распределители управляют линейными генераторами ЛГ 1÷ЛГ 15. Эти генераторы настроены на 15 различных частот. В нормальном состоянии ЛГ выключены. Если какой то объект меняет свое состояние, то соответствующий распределитель на данном шаге включает линейный генератор.

Структура табло ЧДК На центральном пункте располагается табло матричного типа табло поездного диспетчера. К табло – матрице подключаются выходы приемников ПК 1÷ПК 15 и выходы Р. На табло изображается конфигурация контролируемого участка. 15 горизонталей, 32 вертикали. На горизонтали передается информация со станции. – элементы индикации, размещенные на табло (тиратроны МТХ 90 или светодиоды). В зависимости от управления табло могут быть статическими и динамическими.

Статическое табло обладает памятью, где информация, передаваемая на табло, запоминается элементами памяти. Динамические табло не имеют элементов памяти и информация отображается только в момент подключения горизонталей и вертикалей и не запоминается. В этом случае за счет скорости опроса вертикалей и горизонталей информация воспринимается глазом человека как непрерывная. Динамическое табло более экономичное, хотя и более сложное в управлении. На пересечении горизонталей и вертикалей включены элементы индикации (светодиоды). Основным недостатком данной системы является её низкая информативность о поездной ситуации и о контролируемых объектах; устаревшая элементная база; сложность в настройке системы и обслуживании.

Системы диспетчерского контроля на новой элементной базе. 1. Система передачи данных с линейных пунктов (СПД ЛП). СПД ЛП применяется на сети железных дорог России в качестве базовой системы автоматического сбора, обработки и передачи первичной информации, получаемой от прикладных систем: а) контроля технического состояния подвижного состава; б) контроля функционального и технического состояния устройств СЦБ на станциях и перегонах; в) от системы САИД автоматической идентификации подвижных объектов железнодорожного транспорта; г) контроля функционального и технического состояния средств связи, энергетического хозяйства, охранной и пожарной сигнализации и, при необходимости, других объектов железнодорожного транспорта.
 и включает в")
Система передачи данных организуется с использованием имеющихся каналов тональной частоты (ТЧ) и включает в себя: головную ЭВМ (сервер сигналов), концентраторы информации и контроллеры СЦБ. Недостатки: Система имеет небольшую информативность. Отсутствует возможность контроля аналоговых сигналов.
.")
2. Автоматизированная система диспетчерского контроля (АСДК).

АСДК представляет собой аппаратно программный комплекс, обеспечивающий диспетчерский контроль состояния отдельных узлов и устройств автоматики, телемеханики и связи, поездных передвижений, свободности и занятости приемо отправочных путей, рельсовых цепей и блок участков, состояния переездов, входных и выходных светофоров станций и др. АСДК разделяется на две подсистемы: верхнего и нижнего уровней. Подсистема нижнего уровня состоит из электрических датчиков состояния контролируемых технических средств (контакты соответствующих реле постовых и перегонных устройств, измерительные панели рельсовых цепей и др. ) и контроллеров диспетчерского контроля (КДК), выполняющих сбор цифровой и аналоговой информации, ее обработку и передачу в сеть АСДК. Аппаратура нижнего уровня содержит: а) модуль линейный аналоговый (МАЛ), предназначенный для сбора и преобразования в цифровой код аналоговой информации от восьми контролируемых устройств; б) генератор линейных сигналов (ГЛС), служащий для сбора дискретных сигналов от 15 контролируемых устройств (контакты реле) и реле состояния блок участка (переезда). Кроме того, ГЛС принимает цифровой код измеренных аналоговых величин и передает его в линию в виде последовательного циклического кода.

Одновременная передача информации с 24 сигнальных установок в общую линию связи основана на частотном разделении каналов. Кодирование информации о состоянии 15 контролируемых устройств или аналоговой информации каждым ГЛС выполняется по принципу временного разделения каналов. Информация от каждой сигнальной установки по линии связи (например, ДСН с развязкой конденсаторами от цепей постоянного тока) поступает на станционную приемную аппаратуру и выделяется полосовыми фильтрами модулей приемных каналов ПК. После дешифрации принятого сигнала ПК выставляет информацию в последовательную интерфейсную шину RS 232 для использования аппаратурой верхнего уровня АСДК. Подсистема верхнего уровня выполняет прием и маршрутизацию потоков информации от КДК, ее обработку и отображение на АРМах сети АСДК. На этом уровне осуществляется связь с внешними вычислительными системами, в том числе с АСОУП и автоматизированной системой службы СЦБ (АС Ш). В состав подсистемы верхнего уровня входят различные технологические АРМы пользователей.
. Система АПК ДК имеет двойное назначение")
3. Аппаратно программный комплекс диспетчерского контроля (АПК ДК). Система АПК ДК имеет двойное назначение и обеспечивает: а) оперативный съем информации на сигнальных точках перегонов o состоянии рельсовых участков, светофоров и других средств и передачу ее на станции для последующего использования для контроля поездного положения и технического диагностирования перегонных устройств; б) оперативный съем информации на станциях о состоянии путевых объектов и технических средств и передачу ее поездному диспетчеру и диспетчеру дистанции сигнализации, связи и вычислительной техники; в) обработку и отображение информации у пользователей по ведению исполняемого графика движения; расчету прогнозного графика по текущему поездному положению; расчету показателей работы участка и выдаче справок; логическому определению ложной свободности участка и опасного сближения поездов; анализу работы устройств; определению пред отказного состояния устройств; обнаружению отказа; оптимизации поиска и устранению отказа; архивации и восстановлению событий; статистике и учету ресурсов приборов.

Структурная схема АПК ДК

Система АПК ДК построена по иерархическому принципу. Состоит из трех подсистем, реализуемых с использованием программируемых контроллеров, персональных компьютеров и специального ПО, а также каналов связи между ними, позволяющих организовать вычислительную сеть и автоматические рабочие места (АРМ) пользователей. Система АПК ДК работает с аналоговыми сигналами, снимаемыми с путевых реле питающих фидеров, рабочих цепей стрелочного электродвигателя (ПИК 10), и дискретными сигналами, снимаемыми с контактов реле или индикаторов пульта (пульта табло) ЭЦ (ПИК 120). В системе АПК ДК на сигнальной точке устанавливается аппаратура контроля сигнальной точки (АКСТ) с помощью неё можно передать больший объем информации. Информация передается с помощью кодов (импульсов и интервалов). Каждый код определяется состоянием сигнальной точки и позволяет передать до 16 информационных сообщений. СЧД селектор частот демодулирующий. АПК ДК также обеспечивает сбор и передачу в РЦУП информации от устройств контроля состояния подвижного состава (ПОНАБ, ДИСК и др. ).
 АДК СЦБ предназначена для")
5. Система автоматизации диагностирования и контроля устройств СЦБ (АДК СЦБ) АДК СЦБ предназначена для ввода, обработки и отображения информации, сбора данных, управления параметрами и применяется в составе автоматизированных систем управления технологическими процессами на железнодорожном транспорте. Система измерительно вычислительного комплекса (ИВК АДК) предназначена для непрерывного диагностирования комплекса устройств ЖАТ, программной обработки поступающей информации, регистрации сбоев и отказов в работе технических средств и определения их причин, протоколирования и обмена информацией с внешними системами и системой верхнего уровня, функционирования в составе средств автоматизации технологических процессов на железнодорожном транспорте. АДК СЦБ строится по иерархическому принципу. Структура обеспечивает уровни автоматизации диагностирования и контроля: уровень управления (отделения) дороги – комплексы КДК ШД; уровень дистанций ШЧ – комплексы КДК ШЧД; уровень линейных объектов ЖАТ на станциях и перегонах – станционные комплексы АДК СЦБ, КДК узла или сортировочной станции.

Структурная схема АДК СЦБ

Структурная схема станционного комплекса АДК СЦБ
 модуль центрального блока связи (ЦБС); 2) модуль дискретного ввода (МДВ), предназначенный для")
1. ) модуль центрального блока связи (ЦБС); 2) модуль дискретного ввода (МДВ), предназначенный для контроля дискретных сигналов напряжения постоянного тока гальванически не связанных с источником питания и другими группами входных сигналов, а также для обмена информацией по линии связи типа «токовая петля» с центральным блоком связи ЦБС; 3) модуль аналогового ввода (МАВ), предназначенный для измерения напряжения гальванически не связанных аналоговых сигналов, а также для передачи информации в ЦБС; 4) модуль удаленной гальванической развязки (УГР), предназначенный для расширения функциональных возможностей модулей МАВ в части измерения напряжения одного сигнала как постоянного тока , так и переменного тока;

Использование в модулях дискретного и аналогового ввода гальванической развязки при подключении к объектам контроля достигается за счет использованиz оптронов, что исключает возможность опасных отказов при подключении системы АДК СЦБ к объектам контроля.

Системы Аи. Т на переездах Переездом называется пересечение железной дороги с дорогами других типов: шоссе, трассы и т. д. На переездах с высокой степенью интенсивности движения применяются системы АПС с автошлагбаумами (АШ). На участках с повышенной интенсивностью движения, на ответственных участках устройства ПС оснащаются УЗП. Схема переезда
 ИП – четный (нечетный) известитель приближения. ИП обесточивается и включает переездную автоматику. А,")
Ч(Н) ИП – четный (нечетный) известитель приближения. ИП обесточивается и включает переездную автоматику. А, Б – светофоры, запрещающие движение транспортных средств по переезду. УЗП – устройства заграждения, закрывают проезд транспорта на переезд. ЗС 1, ЗС 2 – заградительные светофоры, сигнализируют одним запрещающим огнем, управляются дежурным по переезду, предназначены для подачи сигнала остановки поезда в случае аварийных ситуаций на переезде. ИС – изолирующие стыки, размещаются за переездом. Служат для контроля освобождения переезда поездом. В этом случае уменьшается время на открытие переезда.

Структурная схема ограждающих устройств на переезде.

На схеме представлены: УОП устройство обнаружения поезда; УВВИ устройство ввода вывода; ПД путевой датчик; РЗ устройство расчета зоны сближения с переездом; И канал извещения на переезд о вступлении поезда в зону сближения: АСС – акустическая светофорная сигнализация; В 1 – элемент выдержки времени закрытия шлагбаумов; АШ – автоматический шлагбаум; В 2 – элемент выдержки времени поднятия крышек УЗП; СП – устройство определения свободности переезда от транспортных средств; ЗС – заградительный светофор; ЩАПС и ЩУК – щитки управления и контроля АПС и УЗП соответственно.

Появление поезда фиксирует ПД, и после того как РЗ установит факт вступления поезд в зону сближения с переездом, канал И передает управляющий приказ о подготовке переезда к проследованию поезда по следующим процедурам: включение АСС и приведение шлагбаумов в закрытое положение; проверка устройством СП наличия на переезде транспортных средств; поднятие крышек УЗП; информирование посредством ЩАПС и ЩУК дежурного работника о приближении пое работе устройств ПС и их состояния; информирование водителей транспортных средств о режиме движения по переезду. После выдержки времени В 1 вырабатывает команды АШ на для приведения в закрытое положение, элементу В 2, в котором начинается отсчет времени и УЗП, в котором производится проверка наличия транспортных средств на крышках. После выполнения этих процедур крышки УЗП поднимаются. Устройство СП выполняет проверку состояния переезда. В качестве обнаружения препятствия на переезде используется радиотехнический датчик, который обеспечивает пространственный контакт с транспортом посредством экранирования им сигнала, излучаемого передатчиком. При наличии остановившегося транспорта на переезде автоматически включается ЗС для немедленной остановки поезда. Включать ЗС может и дежурный работник самостоятельно.

Системы регулирования движения поездов на станциях Станционные системы автоматики и телемеханики разделяются на три большие группы: нецентрализованные системы управления стрелками и сигналами, системы централизации стрелок и сигналов, системы механизации и автоматизации сортировочных станций. В нецентрализованных системах средства управления и контроля рассредоточены в пределах станции. В централизованных системах средства управления и контроля сосредоточены в одном месте станции – на посту централизации. В общем виде системы централизации подразделяются на механические и силовые. В силовых централизациях для изменения положения стрелки или состояния сигнала используется какой либо вспомогательный вид энергии. Это в основном является электрическая централизация, в которой принципы действия средств управления и контроля построены на использовании электрического тока. Горочные устройства автоматики и телемеханики применяются на сортировочных станциях, на которых осуществляется расформирование вагонов и формирование из них поездов, следующих на большие расстояния без переработки. Важнейшим элементом такой системы является горка.
: релейная централизация РЦ; маршрутно")
Для регулирования движения поездов на станции применяются электрические централизации (ЭЦ): релейная централизация РЦ; маршрутно релейная централизация МРЦ; блочно маршрутная релейная централизация БМРЦ; релейно процессорная централизация РПЦ; микропроцессорная централизация МПЦ. Системы ЭЦ должны выполнять следующие функции: 1. Управление стрелками при установке маршрута; 2. Управление светофорами (входными, выходными, маневровыми). Системы ЭЦ должны обеспечивать условия безопасности: 1. Исключение приема поезда на занятые пути; 2. Исключение установки враждебных маршрутов; К ним относятся: маршруты приема поездов с разным направлением на один и тот же путь; маршруты для движения поезда, в которых участвуют одни и те же стрелки в разных положениях. 3. Исключение возможности перевода стрелок под составом.

Исходя из условий безопасности при установке маршрута должен быть осуществлен контроль состояния путей в этом маршруте и контроль положения стрелок. Светофор, ведущий на этот маршрут должен открываться только при соблюдении условий безопасности. Состояние путей и их свободность проверяется путевыми реле. П – путевые реле контролирующее пути; СП – путевые реле, контролирующие стрелочные участки. Каждое путевое реле номеруется по номеру контролируемого участка пути. Установленный маршрут фиксируется маршрутными реле (М) или контрольно маршрутными реле (КМ). В схемах маршрутных реле проверяются условия безопасности. М могут встать под ток только при соблюдении условий безопасности. Стрелочные переводы предназначаются для перемещения подвижного состава с одного пути на другой. Положение стрелок маршрута контролируется стрелочными контрольными реле (ПК, МК – плюсовое, минусовое положение стрелки). Исключение перевода стрелок в установленном маршруте производится с помощью замыкающих реле – З. Контакты этих реле включены в схему управления стрелками. Замыкание маршрута происходит в момент открытия светофора. Открытие светофора производится сигнальными реле С.

При проектировании ЭЦ за основу берется путевой план станции, в соответствии с которым определяются виды движения поездов по станции, положение стрелок, враждебность маршрутов и составляется таблица зависимостей и взаимозамыканий. По этой таблице составляются схемы ЭЦ. Однониточный план станции (нечетной горловины)

Таблица зависимостей и взаимозамыканий. Направление движения Номер маршрут а Наименование маршрута По светофору Прием 1 На путь I П 2 Показание светофора Стрелки Маршруты 5 Н + На путь 3 П Н + 3 На путь 4 П Н – – 4 С пути II П Ч II + 5 Отправление 1/3 7 1 2 3 4 5 + • х х – х • х х + х • х С пути 4 П Ч 4 + – х х • Стрелки 1/3. – стрелочный съезд. Х – враждебность маршрута (1 и 2 потому что 5 стрелка должна быть одновременно и в «+» и в « «), (3 и 1 , потому что стрелка 1/3 в разных положениях)

На основании таблицы зависимостей при разработке функциональной структуры проектируемой системы автоматики и телемеханики в маршруты вводятся замыкания, т. е. производится обеспечение исключения положений, несовместимых по условиям безопасности движения поездов. Так, сигнальная цепь должна быть построена таким образом, чтобы исключалось открытие светофора, если стрелки установлены не по маршруту или отсутствует контроль их положения; заняты путевые участки, входящие в маршрут; светофоры враждебных маршрутов не сигнализируют запрещающим огнем. Цепь управления стрелкой не должна допускать ее перевода, если открыт светофор по маршруту, в который она входит, или если на ней находится подвижная единица. Различают механический, электромеханический, релейный и программный способы осуществления замыканий. В ряде случаев название станционных систем автоматики объясняется способом замыкания, примененного в них (ключевые зависимости, механическая, механико электрическая, релейная централизация и т. д. ).

В соответствии с основными задачами, решаемыми ЭЦ (перевод стрелок, открытие светофоров, достижение взаимного замыкания между стрелками и светофорами, снятие замыканий после использования маршрута или его отмены), во всех видах релейных централизаций предусматриваются следующие основные цепи (схемы) в функциональной структуре: управления электроприводами и контроля положения стрелок; управления светофорами и контроля их состояния; замыкающих реле З; маршрутных реле М.

Общий вид схемы управления стрелочным электроприводом и контроля положения стрелки В общем виде схема управления стрелочным электроприводом и контроля положения стрелки содержит три цепи: управляющую, рабочую и контрольную. В настоящее время на железных дорогах России широкое распространение получили двухпроводная схема управления стрелочным электроприводом постоянного тока – (на крупных станциях) и четырехпроводная – (на малых). При новом проектировании рекомендуется применять пятипроводную схему управления электроприводом переменного тока, имеющую лучшие технико экономические показатели.

Схема сигнального реле СК – сигнальная кнопка, имеет 2 контакта. Один замыкающий – при нажатии, второй размыкающий – при вытягивании обесточивает сигнальное реле для перекрытия светофора. ПС – реле и контакты разрешающего сигнала (пригласительного). ПК – путевые контрольные реле (контролируют участки пути). СП – реле контролирующее стрелочные секции. Звр контакты замыкающего реле враждебных маршрутов. Если задан враждебный маршрут, то замыкающее реле обесточивается, включение сигнального реле исключается. С – сигнальное реле, включает на светофоре запрещающий сигнал (если оно обесточено).

РУ – указательное реле разрешающих показаний на светофоре. Реле контролирует действительность разрешающего огня. О – огневое реле, контролирует исправность ламп светофора (зеленого и красного огня). ПСК – кнопка пригласительного сигнала. С помощью нее дежурный по станции (ДСП) включает реле ПС, которое в свою очередь включает пригласительный лунно белый сигнал на светофоре. ЛБО огневое реле. контролирует исправность лампы лунно белого огня. З – замыкающее реле данного маршрута. Оно включается следующим образом З обесточивается, когда С находится под током, следовательно невозможно перевести стрелки и т. д.

Виды релейных централизаций и область их применения Виды релейных централизаций определяются специфическими особенностями станций – их назначением, объемом поездной и маневровой работы, качеством электроснабжения, возможностью техобслуживания и другими местными условиями. Разделяются по следующим признакам: 1. Количество централизованных стрелок. 2. малые (до 10 стрелок), средние (до 30) крупные (более 30 стрелок). 2. Место выполнения взаимного замыкания между стрелками и сигналами. с местным замыканием (аппаратура располагается в релейных будках в горловинах станций) центральным (аппаратура устанавливается в центре станции на посту ЭЦ). 3. Место расположения источников электропитания. с местным питанием (необходимая аппаратура размещается в батарейных и релейных шкафах в горловинах станции) центральным (питающие панели установлены на посту ЭЦ).

4. Способ задания маршрутов. с раздельным и маршрутным управлением стрелками и светофорами. При раздельном управлении для перевода стрелки или открытия светофора используются индивидуальные стрелочные или сигнальные кнопки, при маршрутном – кнопки начала и конца передвижения. При этом осуществляется одновременный перевод всех стрелок, входящих в маршрут, и если требуется – автоматическое открытие попутных светофоров. В современных системах маршрутные кнопки группируются на центральной секции рабочего стола ДСП – манипуляторе. Соответствующее схемное обеспечение называется маршрутным набором. 5. Способ отображения светосхемы станции на табло. точечное табло; (на точечном табло занятие изолированного участка ведет к включению белой лампочки, смонтированной в середине его мнемосхемы), желобковое табло; (желобковое табло дает линейную индикацию в виде красных полос в пределах светосхемы участка). Для формирования полос и в целом плана станции используются миниатюрные световые ячейки прямоугольного типа. На крупных станциях для лучшего обозрения желобковое табло устанавливается на расстоянии 2, 5 – 3 м от рабочего стола ДСП.

6. Способ размыкания маршрутов. Возможно применение схем, предусматривающих одновременное размыкание всех с трелок, входящих в маршрут, после полного его использования (так называемый несекционированный способ) и обеспечивающих последовательное размыкания стрелок по мере проследования состава по маршруту (секционированный способ). По совокупному проявлению перечисленных выше признаков релейные централизации подразделяются на следующие системы. 1. ЭЦ с местным питанием и местным замыканием (ЭЦ МПМЗ). В этой системе аппарат управления размещается в станционном здании, а необходимая аппаратура – в горловинах станции в релейных будках (РБ) и батарейных колодцах (БК). В системе предусмотрено раздельное управление стрелками и сигналами, наличие точечного табло, возможность несекционированного размыкания маршрутов, стативный монтаж нештепсельной аппаратуры.
. В этой системе все")
2. ЭЦ с местным питанием и центральным замыканием (ЭЦ МПЦЗ). В этой системе все функциональные связи начинаются и заканчиваются на посту ЭЦ, однако часть приборов, обеспечивающих питанием электродвигатели стрелочных приводов, лампы светофоров, рельсовые цепи, располагается в релейных и батарейных шкафах в горловинах станции. В системе применяются раздельное управление стрелками и светофорами, точечное табло, несекционированное размыкание маршрутов, стативный монтаж штепсельной аппаратуры. 3. ЭЦ с центральным питанием и центральным замыканием (ЭЦ ЦПЦЗ). В настоящее время эта система получила широкое распространение на сети дорог страны, неоднократно модифицировалась. Предусматривает секционированное построение основных функциональных цепей, использование малогабаритных штепсельных реле и блочное оформление повторяющихся схемных узлов.
 и релейно процессорные (РПЦ) системы. МПЦ")
В настоящее время разработаны и проектируются микропроцессорные (МПЦ) и релейно процессорные (РПЦ) системы. МПЦ имеет трехуровневое построение, в котором первый уровень представляют автоматизированные рабочие места, второй – управляющий вычислительный комплекс (УВК), третий – объекты управления и контроля, имеющие непосредственную связь с УВК. РПЦ отличается тем, что УВК связан с напольными объектами через исполнительную группу какого либо вида релейной централизации. На российских железных дорогах в различные годы в опытную эксплуатацию или в серию были внедрены следующие виды релейно процессорных централизаций: 1. ТУМС (система телеуправления малодеятельными станциями). 2. МСТУ (комплекс микропроцессорных систем телеуправления маршрутами на станциях). Система представляет собой интеграцию ЭЦ, МАЛС (маневровой автоматической локомотивной сигнализации) и ДЦ (диспетчерской централизации).

3. Диалог Ц. РПЦ трансформирована из соответствующей системы ДЦ. Рассчитана на сопряжение с исполнительной группой реле любой системы релейной централизации. 4. ЭЦ МПК. Разработчиком системы является Центр компьютерных железнодорожных технологий ПГУПСа (2001 г. ) Рекомендована к внедрению на станциях с количеством стрелок 11 – 30 (при количестве стрелок до 60 – совместно с МПЦ). Система построена по трехуровневой структуре, в которой верхний уровень представляют АРМы дежурного по станции (ДСП) и электромеханика (ШН), средний – комплекс технических средств управления и контроля (КТС УК), нижний – исполнительные схемы ЭЦ

Структура ЭЦ МПК Система построена по трехуровневой структуре, в которой верхний уровень представляют АРМы дежурного по станции (ДСП) и электромеханика (ШН), средний – комплекс технических средств управления и контроля (КТС УК), нижний – исполнительные схемы ЭЦ

МПЦ предназначена для управления стрелками, сигналами, переездной сигнализацией и другими устройствами на станциях и прилегающих к ним перегонах и, в сравнении с централизацией стрелок и сигналов релейного типа, имеет ряд преимуществ: более высокий уровень надёжности, за счёт дублирования многих узлов, более высокий уровень обеспечения безопасности движения поездов, за счёт непрерывного обмена информацией между управляющим процессором и объектами управления и контроля; расширенный набор технологических функций, включая замыкание маршрута без открытия светофора, блокировку стрелок в требуемом положении; повышенную информативность для эксплуатационного и технического персонала о состоянии устройств СЦБ на станции, с возможностью передачи этой и другой информации в региональный центр управления перевозками;

меньшую энергоёмкость; непрерывное архивирование действий эксплуатационного персонала по управлению объектами СЦБ и всей поездной ситуации на станции; встроенный диагностический контроль состояния аппаратных средств централизации и объектов управления и контроля; возможность регистрации всех отказов устройств СЦБ на станции и перегоне; значительно меньшие габариты оборудования и, как следствие возможность замены на станциях централизации устаревшего типа без строительства новых постов ЭЦ; значительно меньший объём строительно монтажных работ; пониженные затраты на эксплуатационное обслуживание.

В настоящее время на сети железных дорог внедряются несколько типов МПЦ. К ним относятся МПЦ 2, МПЦ 2 Б, МПЦ И, ЭЦ ЕМ и МПЦ Ebilock 950. В структуру МПЦ Ebilock 950 входят следующие функциональные узлы: 1. Автоматизированные рабочие места дежурного по станции (АРМ ДСП), электромеханика (АРМ ШН), оператора пункта технического осмотра вагонов (АРМ ПТО), маневрового диспетчера (АРМ МУ). 2. Центральный процессор (ЦП), состоящий из основного и резервного компьютеров. 3. Концентраторы связи (КС), подключаемые к ЦП через модемы и петли связи (четырехпроводный кабель). 4. Объектные контроллеры (ОК), подключаемые через напольный кабель к объектам управления и контроля. 5. Устройства бесперебойного электропитания (УБП).

Структура МПЦ Ebilock 950

Функциональные узлы МПЦ Ebilock 950 1. 2. 3. 4. Автоматизированные рабочие места дежурного по станции (АРМ ДСП), электромеханика (АРМ ШН), оператора пункта технического осмотра вагонов (АРМ ПТО), маневрового диспетчера (АРМ МУ). 2. Центральный процессор (ЦП), состоящий из основного и резервного компьютеров 3. Концентраторы связи (КС), подключаемые к ЦП через модемы и петли связи (четырехпроводный кабель). 4. Объектные контроллеры (ОК), подключаемые через напольный кабель к объектам управления и контроля. 5. Устройства бесперебойного электропитания (УБП).

ЦП безопасным способом осуществляет все функции ЭЦ. При этом резервный компьютер ЦП находится в горячем резерве, обрабатывая только сигналы ТС. ЦП строится на использовании трех процессоров Motorola MC 68030 с общим объемом памяти 12 мб и энергонезависимой памяти объемом 8 кб. Концентраторы связи предназначены для распознавания объекта, для которого передается приказ от ЦП, а также для формирования телеграмм состояния объектов для ЦП. В каждой петле связи может содержаться до 15 концентраторов. При этом к одному компьютеру допускается подключать не более 12 петель связи. Объектные контроллеры принимают приказы от концентраторов связи и преобразуют их в сигналы по управлению объектами, а также принимают сигналы состояния от объектов и через КС передают их в ЦП. Элементной базой для ОК послужили микропроцессоры Intel 8031.

Системные программы МПЦ Ebilock 950 в целях безопасности работы диверсифицируются, т. е. существуют в двух версиях. Каждый вариант написан отдельной группой программистов. Обработка логики централизации происходит циклически с периодом в 0, 3 с. В течение цикла выполняются следующие операции: собирается и обрабатывается информация о состоянии всех станционных объектов; результаты сравниваются в двух обособленных друг от друга безопасных процессорных модулях, и если результаты различны, действие системы прекращается до устранения неисправности; информация о станции передается на дисплей; формируются приказы на ОК. Для повышения работоспособности петель связи в случае повреждения кабеля в системе предусматривается переход ЦП с одностороннего режима опроса КС на двухсторонний с автоматической отсечкой неисправного участка.

Диспетчерская централизация относится к системам телеуправления раздельными пунктами и получения от них информации о состоянии объектов в пределах диспетчерского участка (круга) на значительных расстояниях (сотни км). Оперативное управление движением поездов в пределах диспетчерского участка осуществляет поездной диспетчер (ДНЦ), в подчинении которого находятся ДСП разъездных пунктов. Объектами управления являются стрелки и сигналы промежуточных станций. В системе ДЦ используются два функционально различных сигнала: ТУ – сигналы телеуправления (управление на расстоянии); ТС – сигналы телесигнализации (контроль состояния объектов). По линиям связи передаются управляющие ТУ и известительные ТС приказы.

Строение сигнала ТУ Приказы ТУ, ТС представляют собой электрические сигналы, состоящие из определенного числа импульсов, отличающихся друг от друга своей значностью. Изменяя тот или иной параметр импульса (длительность (время В), полярность (П), частоту (Ч), фазу (Ф), можно получить многозначность его смысловой нагрузки. Использование импульсных признаков для построения сигналов ТУ, ТС Практически используется два значения импульса, одно из которых называют активным (А, символ 1), другое – пассивным (П, символ 0).

В общем виде кодовая посылка ТУ или ТС может быть представлена в следующем виде: Здесь П – подготовительный импульс, позволяющий привести приемные устройства в рабочее состояние; ИЗ – избирательная часть, в которой зашифровывается адрес станции и адрес группы устройств внутри станции; ОП – оперативная часть, или исполнительная: порядковый номер импульса в ней соответствует номеру объекта внутри группы, а его значение (1 или 0) – наличие или отсутствие команды на изменение состояния объекта.

количество станций. количество групп управления. К кол во объектов в группе = 10. Общее количество объектов 16 Х 4 Х 10=640. Предположим имеется кодовая полярность «+» и « «. 1001 – выбирается 9 станция; 11 – выбирается 3 группа управления; 0010100000 – управляющие сигналы передаются на 3 и 5 объекты.

Сигналы ТУ, ТС относятся к двоичным кодам, т. е. таким, которые основаны на двоичном счислении, так как элементы систем ДЦ (реле, триггеры, транзисторы и т. д. ) обладают двумя устойчивыми состояниями. Кодовые комбинации состоят из элементов (разрядов). Коды, у которых число элементов во всех комбинациях одинаково, называют равномерными, а у которых неодинаково – неравномерными. В ДЦ существует возможность искажения приказов, причиной которых являются повреждения аппаратуры монтажа, линейных проводов, наведенных ЭДС и т. д. Хотя эти искажения не вызывают опасных отказов (низовая аппаратура ЭЦ сработает только при выполнении необходимых зависимостей), они приводят к затруднениям в работе ДНЦ и задержание поездов. Различают количественные и качественные искажения. В первом случае изменяется число импульсов в приказе, во втором – их качество. Задача защиты от количественных искажений решается путем применения стандартного счетчика приказов. Если оно отличается от предусмотренного в системе, то приказ считается ложным и не выполняется. Для защиты от качественных искажений применяются так называемые избыточные коды, т. е. такие, которые отличаются друг от друга в двух и более разрядах из их общего числа. C кодовым расстоянием больше 1.

Кодовое расстояние – это число позиций, в которых коды не совпадают. Например, трехразрядный код (n=3) на все сочетания при основании m=2 позволяют получить 8 комбинаций ( ). Однако в них имеются пары (000 и 001, 010 и 011, 100 и 101), в которых в результате искажения одна комбинация легко превращается в другую. Поэтому следует применять для образования приказов пары 000 и 110, 000 и 111 и другие, отличающиеся в двух и трех разрядах. Избыточные коды применяются в построении избирательной части приказа. Для построения исполнительной части используется распределительная селекция.

Структурная схема ДЦ Тракт ТУ. М – манипулятор, при помощи которого диспетчер формирует сигнал ТУ, (клавиатура). НГ – наборная группа, которая физически формирует сигнал (релейные системы, микропроцессоры). Ш – шифратор, служит для придания импульсов кода активных признаков. ( «+» активный признак, « « пассивный признак). ТГ – тактовый генератор. Р – распределитель, синхронизирует работу ЦП и ЛП. Г(М) – генератор (модулятор). ЛУ – линейное устройство.
.")
На линейном пункте: ДМ – демодулятор. РР – регистрирующее реле. (Определяет принят ли код). ДШ – дешифратор. УР – управляющее реле. ОУ – объект управления. Тракт ТС. Т – табло. КР – контролирующее реле, контролирует состояние объектов. НР – начальное реле, фиксирует начало передачи сигнала ТС.

Общая характеристика систем ДЦ Системы ДЦ различаются по следующим принципам: 1. По импульсному: временного кода (ДВК), полярного (сигнал ТУ ПЧДЦ), частотного (ЧДЦ, «Нева» , сигнал ТС ПЧДЦ и системы «Луч» ), фазового (сигнал ТУ системы «Луч» ). 2. По способу передачи сообщений: спорадические, т. е. время от времени (сигналы ТУ во всех системах, сигналы ТС – во всех системах, кроме «Нева» и «Луч» ); циклические (сигналы ТС в системах «Нева» и «Луч» ). 3. По использованию линии связи при передаче сигналов: симплексные, когда существует или сигнал ТУ, или ТС (ДВК, ПЧДЦ, ЧДЦ); дуплексные, когда могут одновременно передаются сигналы ТУ и ТС ( «Нева» , «Луч» ). 4. По элементной базе: релейные (ДВК, ПЧДЦ, ТУ ЧДЦ), бесконтактные ( «Нева» , «Луч» , ТС ЧДЦ), микропроцессорные ( «Дон» , «Сетунь» , «Диалог ТРАНС» .
 Объектами управления и контроля в")
ГОРОЧНЫЕ СИСТЕМЫ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ Горочная автоматическая централизация (ГАЦ) Объектами управления и контроля в горочной автоматической централизации являются стрелки. Управление стрелочными электроприводами осуществляется с пульта табло ГАЦ. Каждый отцеп, скатываясь, сам «продвигает» свое маршрутное замыкание от стрелки к стрелке, воздействуя на схемы трансляции задания. Связывающим звеном между отцепами и схемными зависимостями являются укороченные нормативно разомкнутые рельсовые цепи. В настоящее время на сортировочных горках находиться в эксплуатации релейная система автоматической горочной централизации в блочном оформлении, получившая название БГАЦ ЦНИИ. Ее схемное обеспечение позволяет реализовать 64 маршрута в расчете на полную горку (8 пучков по 8 путей в каждом пучке). Различают ручной (Р), маршрутный (М), программный (П) и автоматический (А) режимы работы устройств БГАЦ. Перевод стрелок вручную является резервным, производиться с помощью стрелочных рукояток.

В режиме М набор маршрута осуществляется с помощью восьми маршрутных кнопок в момент подхода очередного отцепа к головной стрелке. При этом первое нажатие определенной из них воспринимается устройствами как номер пучка, а второе как номер пути в пучке. В режиме П с помощью маршрутных кнопок осуществляется заблаговременное формирование маршрутных заданий в соответствии с расположением номеров отцепов в сортировочном листе. В зашифрованном виде они располагаются в блоках накопителя БН. В режиме А маршрутные задания поступают из горочного программно задающего устройства ГПЗУ, в котором содержаться необходимая информация о составе, подлежащем роспуску.

Структурная схема БГАЦ ФЗ блок формирования задания РЗ блоки регистрации задания ТЗ блок трансляции задания ДШ дешифратор
 Скорость скатывания отцепов с горки и остановка их в")
Система автоматической регулировки скорости (АРС) Скорость скатывания отцепов с горки и остановка их в нужном месте подгоночных путей регулируется вагонными замедлителями. Автоматическое управление ими осуществляется с помощью системы АРС. По способу создания тормозного эффекта вагонные замедлители делятся на зажимающие колесные пары вагонов и не зажимающие (электромагнитные, плунжерные гидравлические, башмачные и др. ). Зажимающие замедлители содержат механизм, действие которого основано на захвате бандажей колес шинами (балками), выступающими над головкой рельсов с обеих его сторон. Замедлитель работает по принципу клещей. Замедлитель имеет два положения – расторможенное, когда в тормозном цилиндре сжатый воздух отсутствует, и тормозные балки разведены, и заторможенное, при котором тормозные балки под воздействием сжатого воздуха сближаются и захватывают колесо с двух сторон. Сила торможения зависит от давления сжатого воздуха в тормозном цилиндре, что определяется состоянием электропневматических клапанов системы АРС.

В общем случае скорость выхода отцепа из тормозной позиции описывается уравнением где – расчетная скорость соударения отцепов (5 км/ч); – ускорение движения отцепа в пределах зоны регулирования; – расстояние от тормозной позиции до стоящих на пути вагонов; – дополнительная скорость, которую должен иметь отцеп для преодоления сопротивлений от кривых и стрелок по маршруту своего следования. Ускорение определяется блоком ИЗУ по временным засечкам прохождения отцепом двух звеньев головного измерительного участка, ограниченных педалями П 1, П 2, П 3. и

Структурная схема АРС

Скорость выхода отцепа определяется как среднее арифметическое весовых характеристик вагонов, входящих в отцеп (легкой, легко средней, средне тяжелой, тяжелой и особо тяжелой). С этой целью головной участок горки оборудуется весомером ВМ, представляющий собой пружинную балку с контактной коробкой. В последней находится шесть пар вертикально расположенных контактных групп. Чем сильнее прогибается балка при накате на нее колеса, тем большее количество контактных пружин воспринимает ее прогиб. фиксируется блоком вычисления весовой категории и длинны Число прогибов отцепов ВВКД. С выхода блока ВВКД рассчитанное значение скорости поступает на устройства управления верхней тормозной позицией УТП 1, где сравнивается с фактической скоростью скатывания отцепа , измеренной радиолокационным измерителем РИС 1. По результатам сравнения выбирается степень торможения отцепа.

При определении скоростней выхода для позиций 2 ТП и 3 ТП требуется в качестве исходного значение дальности пробега отцепа Для определения расстояния в системе предусматриваются устройства контроля заполнения путей подгорочного парка КЗП. С этой целью каждый путь разбивается на участки по 30 м каждый, оборудованные бесстыковыми тональными цепями и измерительными трансформаторами. Длина стрелочной зоны имеет известное значение, а длина каждого отцепа измеряется подсчетом осей, прошедших через весометр. Управление вагонными замедлителями 2 ТП и 3 ТП осуществляется по результатам сравнения подсчитанных и фактических скоростей скатывания отцепов. На каждой тормозной позиции, кроме автоматического управления, предусматривается ручное управление замедлителями с пульта (ПУ).

Система АЗСР Автоматизация процессов, связанных с заданием переменной скорости роспуска составов, управления огнями горочного светофора и маршрутных указателей, осуществляется системой автоматического задания скорости роспуска (АЗСР). Зависимость максимально допустимой скорости надвига составов от условий расхождения двух смежных отцепов на разделительной стрелке. где и , – длины соответственно 1 и 2 отцепов; – их колесные базы; – длина рельсовой цепи на разделительной стрелке; – минимальная скорость движения плохого бегуна; – разность времени хода плохого и хорошего бегуна до разделительной стрелки.

Структурная схема АЗСР

ВТ 340 видео терминальноое устройство; УФИВ формирователь вызова; УС устройство сопряжения; НИ двухступенчатый накопитель информации; УУ – блок управляющего устройства; КО – контрольный блок; В блоке К 0 сравнивается скорость надвига и свободного скатывания, измеренные радиолокационными скоростемерами РИС 1 и РИС 2 После определения блоком РС разделительной стрелки информация поступает в блок вычисления скорости роспуска ВСР. В блоке преобразования скорости роспуска ПСР происходит преобразование аналогового значения скорости роспуска в дискретную величину. Блок ПСР содержит 15 выходов, соответствующих градациям скорости от 3 до 9 через каждые 0, 5 км/ч. Вычисленные значения скорости фиксируются блоком ФВС, который включает соответствующие реле управления световой индикацией УИ, коммутирующие цепи ламп горочного светофора и маршрутного указателя скорости роспуска.

Вопросы для подготовки к экзаменам по курсу СЖАТ 1. Классификация устройств ЖАТ. 2. Объекты управления и контроля в железнодорожных системах автоматики и телемеханики. 3. Устройство стрелочных переводов и их классификация. 4. Назначение и классификация светофоров. 5. Устройства контроля состояния участка пути. Датчики. 6. Устройство и классификация рельсовых цепей. 7. Первичные параметры рельсовых линий. 8. Вторичные параметры рельсовых линий. 9. Схемы замещения электрических РЦ. 10. Параметры и уравнения четырехполюсников. 11. Аппаратура рельсовых цепей. 12. Нормальный режим работы РЦ. 13 Шунтовой режим работы РЦ. 14. Контрольный режим работы РЦ. 15. Классификация систем путевой блокировки. 16. Способы передачи информации в системах АБ. 17. Организация и способы кодирования рельсовых цепей. 18. Импульсно – проводная автоблокировка постоянного тока.

19. Числовая кодовая автоблокировка. 20 Тональные рельсовые цепи. 21. Точечная локомотивная сигнализация. 22. Характеристики и функциональное назначение АЛСН. 23. Аппаратура АЛСН. 24. Локомотивные устройства САУТ. 25. Напольная аппаратура САУТ. 26. Передача информации с перегонов на станции в системе ЧДК. 27. Передача информации с промежуточных станций на ЦП в системе ЧДК. 28. Система передачи данных с линейных пунктов (СПД ЛП) 29. Системы диагностики устройств ЖАТ 30. Переездные устройства автоматики. 31. Классификация станционных систем Аи. Т. 32. Таблица взаимозависимостей и замыканий. 33. Принципы обеспечения безопасности в системах ЭЦ. 34. Структура микропроцессорной централизации 35. Принципы построения и структура ДЦ. 36. Горочная автоматическая централизация. 37. Система АРС. 38. Система АЗРС.
Презентация для консультации СЖАТ_А.ppt