
Оно движется! 19. 03. 16 (с) hackspb.

- Размер: 1.9 Mегабайта
- Количество слайдов: 28
Описание презентации Оно движется! 19. 03. 16 (с) hackspb. по слайдам
Оно движется!
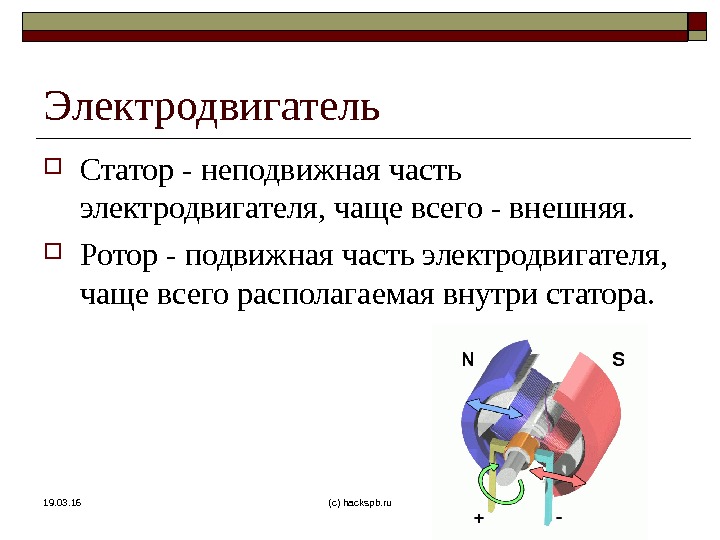
19. 03. 16 (с) hackspb. ru. Электродвигатель Статор — неподвижная часть электродвигателя, чаще всего — внешняя. Ротор — подвижная часть электродвигателя, чаще всего располагаемая внутри статора.
19. 03. 16 (с) hackspb. ru. Электродвигатели ~ Переменного тока Синхронные Асинхронные – Постоянного тока Коллекторные Бесколлекторные
Электродвигатели переменного тока
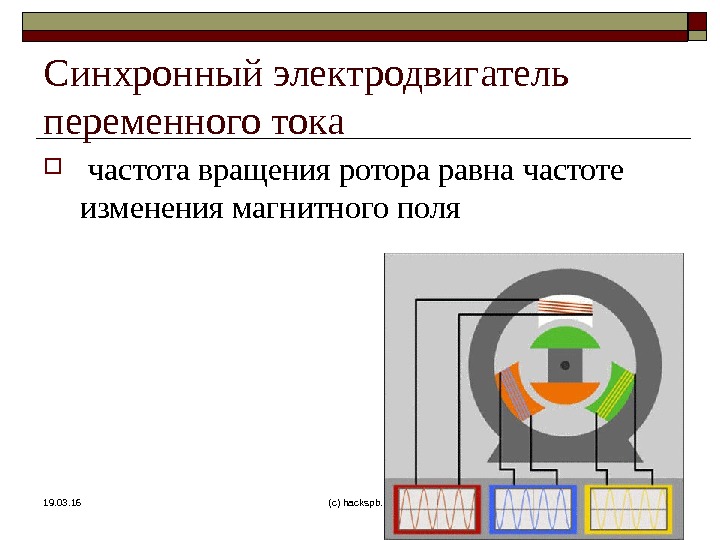
19. 03. 16 (с) hackspb. ru. Синхронный электродвигатель переменного тока частота вращения ротора равна частоте изменения магнитного поля
19. 03. 16 (с) hackspb. ru. Синхронный электродвигатель Преимущества Точная управляемость благодаря тому, что ротор точно следует создаваемым магнитным полям катушек статора Высокий КПД , так как не нужно создавать дополнительное электромагнитное поле в роторе. Недостатки Большие расходы на изготовление в сравнении с асинхронным электромотором. Это связано с необходимостью создавать сердечник ротора для повышении эффективности не из простого магнита, а из специальных дорогостоящих сплавов. Тяжелый ротор – выше вес
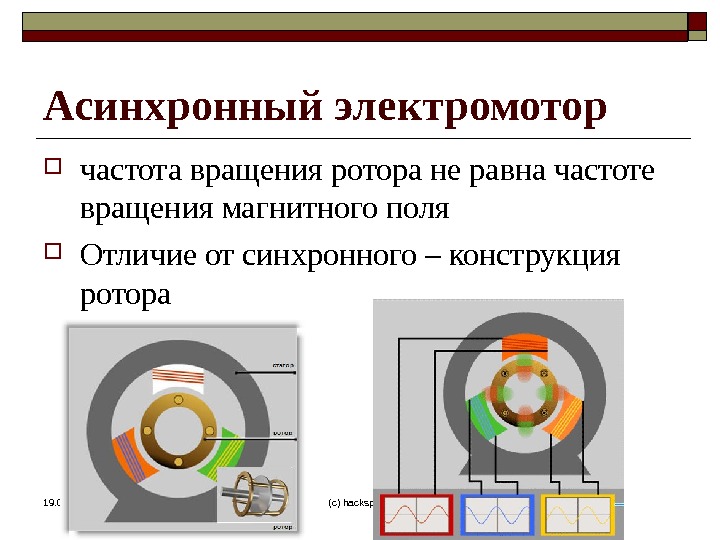
19. 03. 16 (с) hackspb. ru. Асинхронный электромотор частота вращения ротора не равна частоте вращения магнитного поля Отличие от синхронного – конструкция ротора
19. 03. 16 (с) hackspb. ru. Асинхронный электромотор постоянного тока Преимущества: надежный, широко распространен способен кратковременно выдерживать большую перенагрузку (до 2, 5 раз). Способность переносить нагрузку ограничивается только теплоотводом от катушек статора. меньший вес из-за отсутствия постоянных магнитов в роторе Недостатки: меньший коэффициент полезного действия, чем в синхронном электромоторе, особенно в момент запуска инертное начало работы, так как в роторе сначала необходимо создать магнитное поле
Электродвигатели постоянного тока
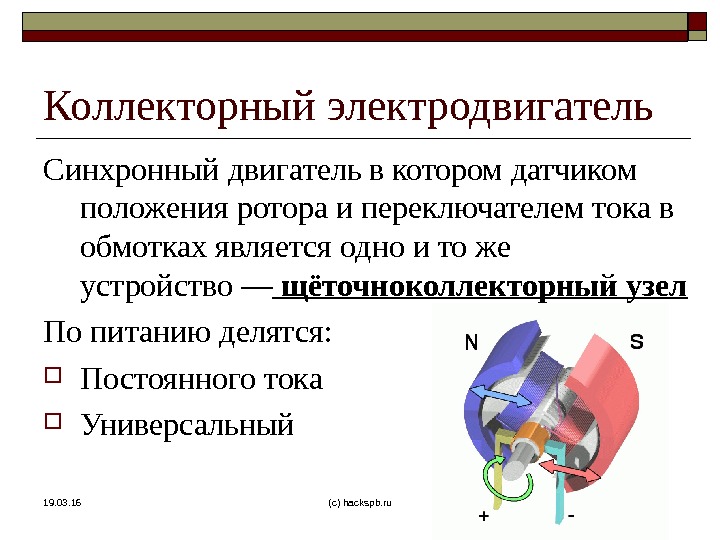
19. 03. 16 (с) hackspb. ru. Коллекторный электродвигатель Синхронный двигатель в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточноколлекторный узел По питанию делятся: Постоянного тока Универсальный
19. 03. 16 (с) hackspb. ru. Коллекторный электродвигатель Преимущества: Простота изготовления Недостатки: Малое КПД Искрит и шумит
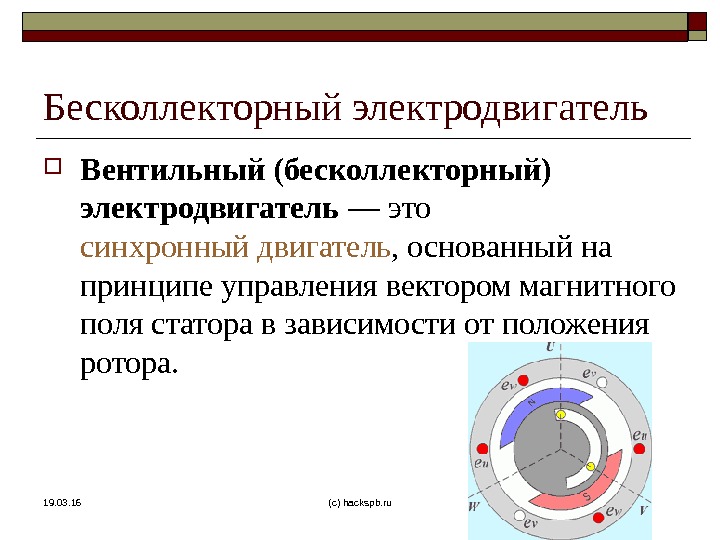
19. 03. 16 (с) hackspb. ru. Бесколлекторный электродвигатель Вентильный (бесколлекторный) электродвигатель — это синхронный двигатель , основанный на принципе управления вектором магнитного поля статора в зависимости от положения ротора.
19. 03. 16 (с) hackspb. ru. Достоинства: Широкий диапазон изменения частоты вращения Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина Возможность использования во взрывоопасной и агрессивной среде Большая перегрузочная способность по моменту Высокие энергетические показатели Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
19. 03. 16 (с) hackspb. ru. Недостатки Относительно сложная система управления двигателем Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты
Внимание =) Теперь самое важное Шаговые электродвигатели и сервомашинки
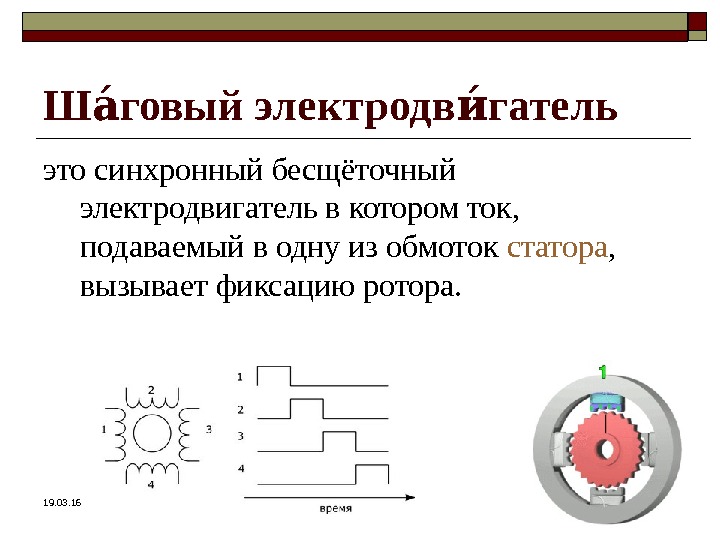
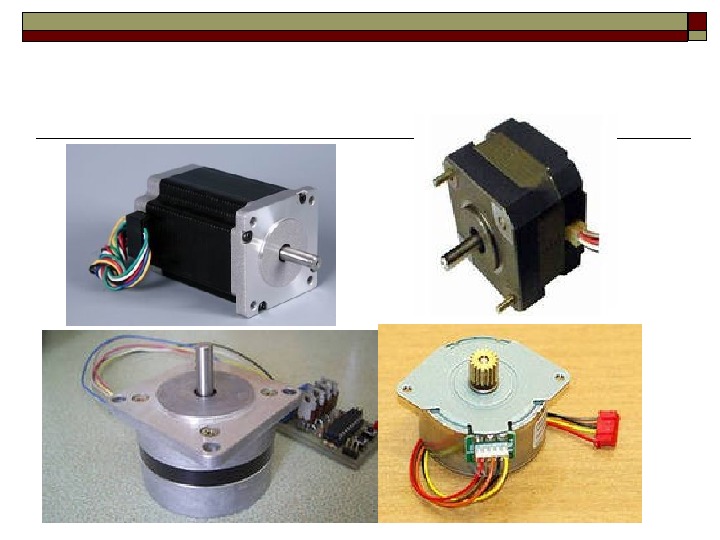
19. 03. 16 (с) hackspb. ru. Ш говый электродв гательаа иа это синхронный бесщёточный электродвигатель в котором ток, подаваемый в одну из обмоток статора , вызывает фиксацию ротора.
19. 03. 16 (с) hackspb. ru
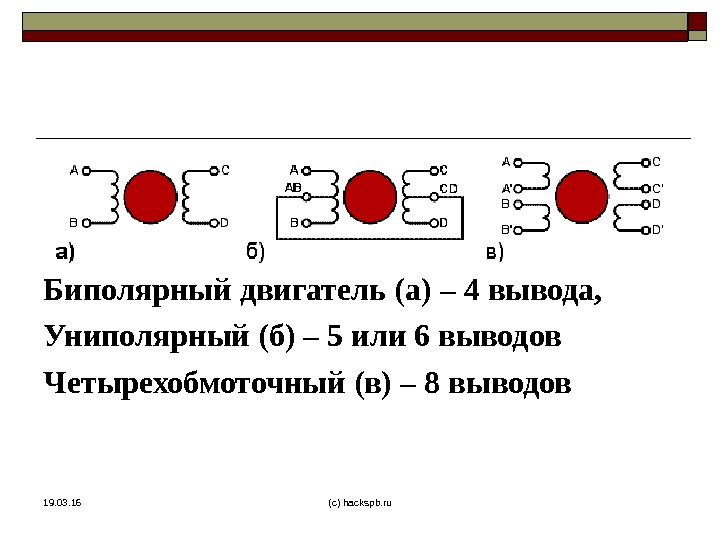
19. 03. 16 (с) hackspb. ru. Биполярный двигатель (а) – 4 вывода, Униполярный (б) – 5 или 6 выводов Четырехобмоточный (в) – 8 выводов
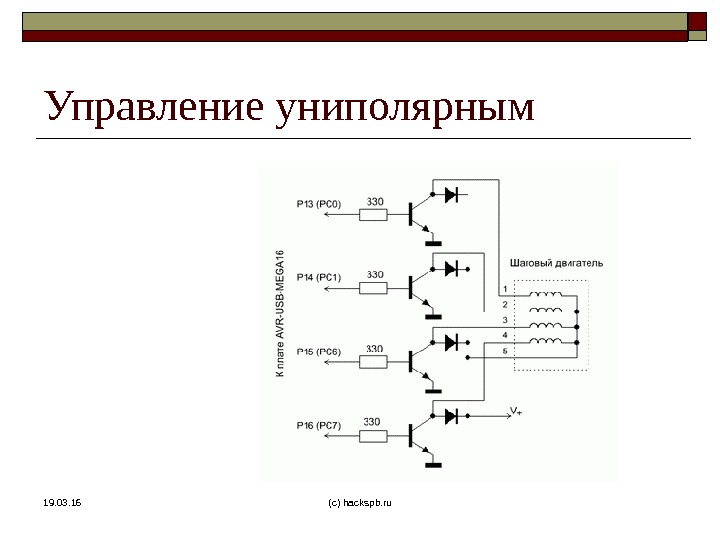
19. 03. 16 (с) hackspb. ru. Управление униполярным
19. 03. 16 (с) hackspb. ru. Обычно: Напряжение питание = 12 или 24 вольта Потребляемый ток – от 0, 5 до 1, 5 А Шаг – 1, 8 ° (200 шагов) или 0, 9 °
19. 03. 16 (с) hackspb. ru. Микрошаговый режим — реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами
19. 03. 16 (с) hackspb. ru. Особенности шаговых двигателей Небольшие ускорения Необязательна обратная связь
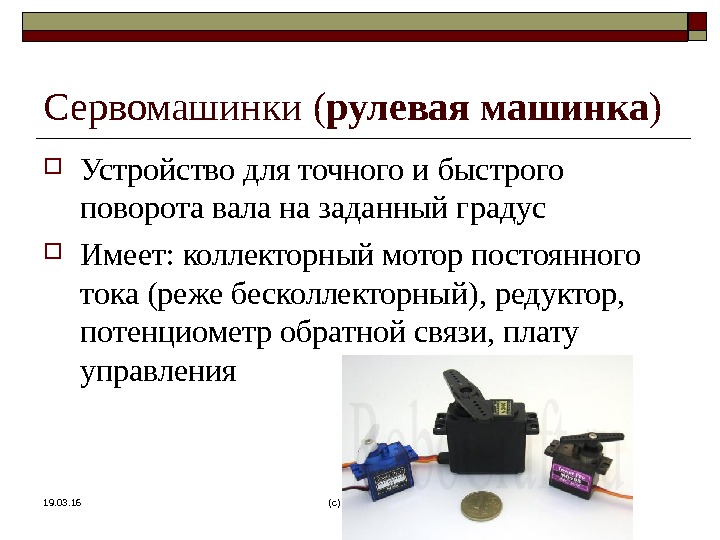
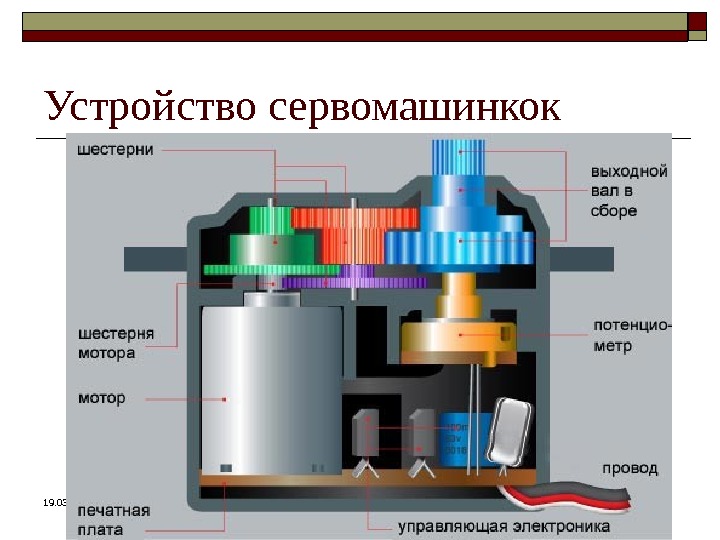
19. 03. 16 (с) hackspb. ru. Сервомашинки ( рулевая машинка ) Устройство для точного и быстрого поворота вала на заданный градус Имеет: коллекторный мотор постоянного тока (реже бесколлекторный), редуктор, потенциометр обратной связи, плату управления
19. 03. 16 (с) hackspb. ru. Устройство сервомашинкок
19. 03. 16 (с) hackspb. ru. Сервомашинки Ред кторуа — механизм, передающий и преобразующий крутящий момент, с одной или более механическими передачами
19. 03. 16 (с) hackspb. ru. Разновидности Аналоговые Цифровые (работа по протоколу i 2 c)
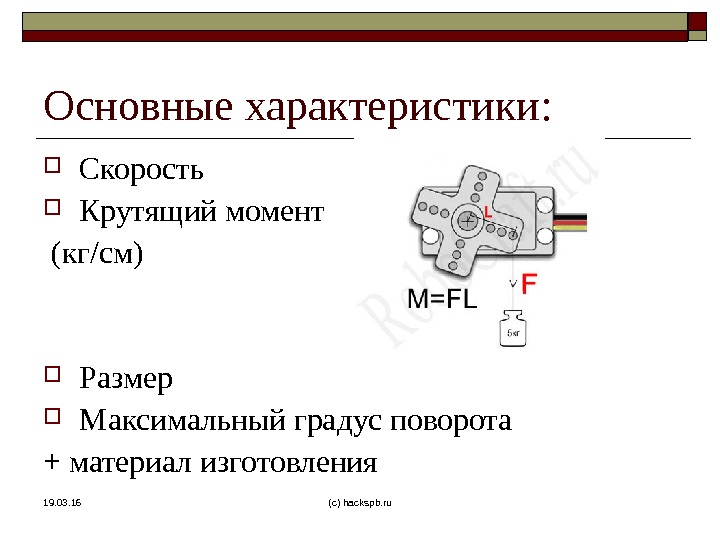
19. 03. 16 (с) hackspb. ru. Основные характеристики: Скорость Крутящий момент (кг/см) Размер Максимальный градус поворота + материал изготовления
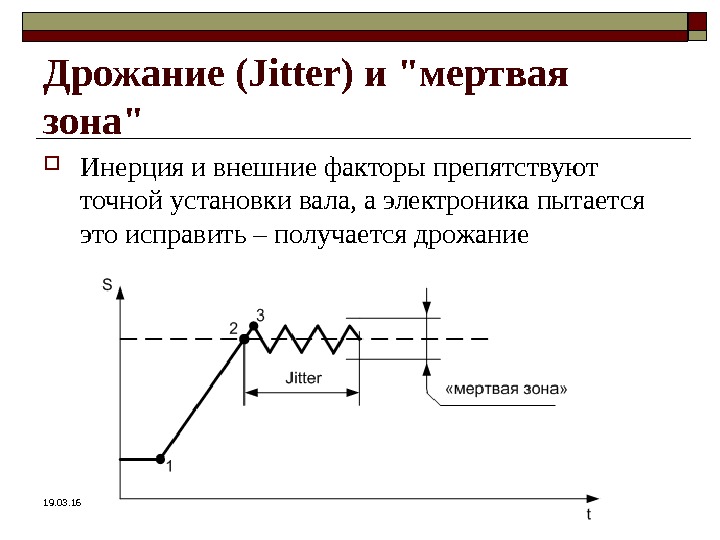
19. 03. 16 (с) hackspb. ru. Дрожание (Jitter) и «мертвая зона» Инерция и внешние факторы препятствуют точной установки вала, а электроника пытается это исправить – получается дрожание