Презентация гибкость.ppt
- Количество слайдов: 16



Гибкость полимерных цепей Способность к изменению конформации определяет важнейшее свойство макромолекул - их гибкость. Гибкость Равновесная (термодинамическая) Кинетическая Равновесная гибкость характеризует способность изолированной невозмущенной макромолекулы к конформационным превращениям под действием теплового движения. Кинетическая гибкость характеризует способность макромолекулы к конформационным превращениям под действием внешних механических сил.

В изолированном состоянии макромолекула имеет свернутую конформацию и представляет собой клубок. Чем более гибкой является цепь, тем сильнее свернута макромолекула, тем меньше ее линейные размеры. Размеры макромолекул Изолированная макромолекула в процессе теплового движения может принимать большое число разнообразных конформаций, поэтому размеры цепи характеризуют средним расстоянием между её концами: При этом обычно среднеквадратичное расстояния: . используют значение

Для характеристики размеров цепи используют также понятие о среднеквадратичном значении радиуса инерции цепи - Величина . - есть средний квадрат расстояния (ri) всех элементов свёрнутой цепи от её центра тяжести: Для макромолекул линейных полимеров :

Контурная длина цепи – L – размер гипотетической предельно вытянутой цепи: В первом приближении: L = N l, более точно где - угол, дополнительный к валентному между атомами основной цепи. Для количественной сравнительной оценки гибкости цепи без проведения эксперимента прибегают к моделированию. Модель свободно-сочленной цепи В этой модели звенья полимерной цепи длиной l свободно вращаются друг относительно друга, взаимодействия между ними отсутствуют (идеальная цепь).

Рассмотрим идеальную цепь, состоящую из N свободно-сочлененных звеньев, каждое длиной l. Вычислим среднеквадратичное расстояние между концами такой цепи Вектор R равен сумме векторов звеньев ui: Тогда квадрат расстояния между концами цепи будет: Среднее этой величины равно: В этом равенстве Тогда: т. к. звенья произвольно. расположены

Сравнение контурной длины среднеквадратичного размера: свободно-сочлененной цепи и её При N= 100 размеры цепи составляют 0, 1 от размеров вытянутой цепи, при N = 10000 - 0, 01 от размеров вытянутой цепи: чем больше N, тем сильнее скручена полимерная цепь.

Модель цепи с фиксированным валентным углом Рассмотрим модель цепи с фиксированным углом между звеньями и свободным внутренним вращением: Для такой модели средний квадрат расстояния между концами цепи записывается аналогично: но где k – номер звена относительно звена i, , где - угол между звеньями где γ – угол, дополнительный к валентному.

Валентный угол в карбоцепном полимере равен 109030’. Тогда γ 700. Поскольку cos 700 0, 33, то: Средние размеры цепи с фиксированными валентными углами по сравнению со свободно-сочленённой цепью увеличиваются в 1, 4 раза, хотя по-прежнему макромолекула остаётся сильно скрученной. Модель полимерной цепи с заторможенным вращением где - угол внутреннего вращения.
 - средний угол относительно свободного вращения = 660, Поливинилнафталин (жёсткоцепной полимер)")
Полиэтилен (гибкоцепной полимер) - средний угол относительно свободного вращения = 660, Поливинилнафталин (жёсткоцепной полимер) = 10 -150 Вывод: размеры цепи жёсткоцепного полимера в 6, 6 раз превышают размеры макромолекулы гибкоцепного полимера.

Количественные характеристики гибкости полимерных цепей Персистентная длина цепи Выражение для среднего косинуса угла между звеньями i и i+k в модели цепи с фиксированным валентным углом, можно преобразовать так: l – длина звена, тогда s=kl – контурное расстояние между звеньями i и i+k. Из формулы видно, что средний косинус убывает по экспоненте по мере увеличения k, т. е. по мере удаления очередного звена от первого, причем, чем больше k, тем ближе косинус к нулю. Тогда в формуле: 0 Т. о. чем дальше удалены друг от друга звенья, тем меньше взаимосвязь в их взаимном расположении и можно сказать, что они ведут себя, как в модели свободно сочлененной цепи.

Экспонента идет тем круче, чем меньше следовательно, взаимосвязь ориентации звеньев убывает тем быстрее, чем меньше Поэтому персистентную длину можно считать количественной мерой гибкости цепи: чем она меньше, тем более гибкая цепь. Термодинамический сегмент макромолекулы (сегмент Куна) А где L – контурная длина цепи. Физический смысл величины А заключается в том, что она представляет собой среднюю длину приблизительно прямолинейного сегмента цепи. Если средний квадрат расстояния равен L 2, то А= L, т. е. для выпрямленной жесткой цепи вся цепь – это один сегмент Куна. Если средний квадрат расстояния меньше L 2, например, 0, 1 L 2, то А=0, 1 L, один сегмент соответствует десятой части контурной длины.

В реальной полимерной цепи положение звеньев в пространстве взаимосвязаны. Однако при очень большой длине цепи можно заметить, что корреляция между направлениями далеко расположенных друг от друга звеньев уже отсутствует. Если такие звенья соединить линиями, то направления этих линий окажутся также независимыми. Сегмент или отрезок цепи длиной А, положение которого не зависит от положения соседних таких же отрезков, называется термодинамическим сегментом или сегментом Куна.
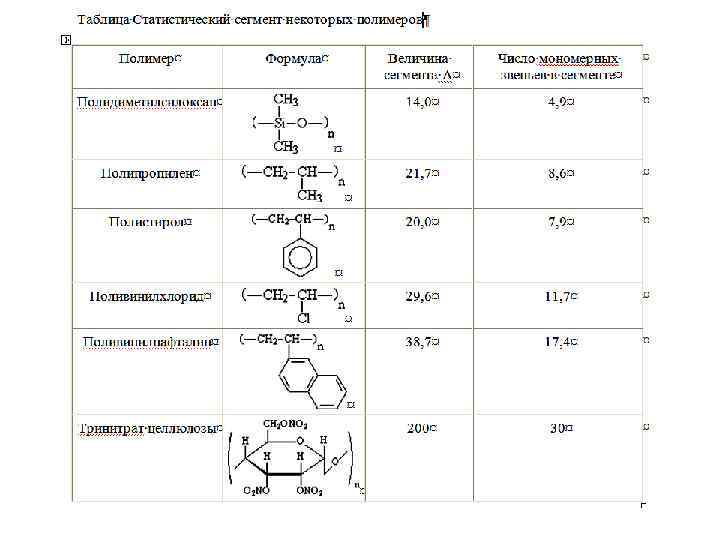

Взаимосвязь между персистентной длиной и длиной сегмента Куна: Относительные невозмущенные размеры полимерных клубков Для ПИ, ПБ это отношение равно 1, 7; для ПС – 2, 2 -2, 4; для тринитрата целлюлозы - 4, 2; для ТАЦ - 6, 8.

Гауссово распределение векторов между концами цепи для случая идеальной цепи Вектор R между началом и концом цепи может быть какой угодно длины в интервале от 0 до контурной длины цепи, и направлен в пространстве произвольно. Для таких случаев справедливо Гауссово распределение: где WN(R) – вероятность появления определенного расстояния между концами цепи.

Кинетическая гибкость, в отличие от термодинамической, зависит не только от строения макромолекулы, но и от внешних факторов: Температура Скорость внешнего механического воздействия Кинетическую гибкость количественно кинетического сегмента. Среда, в которой находится молекула характеризуют величиной Кинетический сегмент – это минимальный отрезок полимерной цепи, способный при внешнем воздействии изменять форму. При низких скоростях lкин А, при быстрой деформации lкин L.
Презентация гибкость.ppt