
Дисципліна: Устрій та бойове застосування КЗА 86




 ЦВУ")



 та позначок дальності МД;")





")





 П 2")
 П 2")




 1. Увімкнути РМ,")

910_4.5.ppt
- Размер: 316.5 Кб
- Автор:
- Количество слайдов: 29
Описание презентации Дисципліна: Устрій та бойове застосування КЗА 86 по слайдам
Дисципліна: Устрій та бойове застосування КЗА 86 Ж 6 Тема № 4: Апаратура автоматизованих робочих місць Заняття№ 5: Обчислювальний вузол цифрового обчислювального пристрою ЦВУ.
ЛІТЕРАТУРА: 1. Устрій та бойове застосування КЗА 86 Ж 6. Частина 1. (за редакцією Сторубльова О. І. ) Навчальний посібник. — К. , 2001. – 205 с. 2. Аппаратура КСА 86 Ж 6. Альбом схем. — К. , 1990. – 130 с.
УЧБОВІ ПИТАННЯ: 1. Призначення та склад ЦВУ РМ. 2. Основні завдання, що вирішуються обчислювальним вузлом. Програми П 1 — П 4 обчислювального вузла. 3. Склад обчислювального вузла РМ за структурною схемою. 4. Принцип роботи обчислювального вузла під час реалізації програми П
1. Призначення та склад ЦВУ РМ (рис. 45 -46, с. 28) ЦВУ робочого місця призначене для перерахунок координат з абсолютної системи координат до відносної та навпаки, а також для формування сигналів відображення інформації на екранах індикаторів РМ.
Склад ЦВУ : — обчислювального вузла ВУ (рис. 49, с. 30) ; — вузла формування відображуваної інформації УФОИ (рис. 50, с. 31).
2. Основні завдання, що вирішуються обчислювальним вузлом : 1. підготування інформації для формування розгортки на екранах індикаторів РМ; 2. підготування інформації про режим роботи РМ та про координати маркера оператора МО для видачі до СВ-1; 3. перерахунок координат екстраполяційної точки ЭТ з полярних координат ДАЛЬНОСТЬ-АЗИМУТ на прямокутні координати Х, У для режиму КР (кругова розгортка);
4. перерахунок координат ЭТ, машинного маркера ММ та вектора з абсолютної системи координат до відносної, аналіз попадання координат відображуваних точок до сектора відображення; 5. підготування сигналів вторинної інформації до відображення її на екрані індикаторів РМ; 6. прийняття початкових умов РМ від зовнішніх джерел;
7. вироблення позначок азимута МА (5° та 30°) та позначок дальності МД; 8. кодування знакової інформації цифрової масштабної шкали та забезпечення відображення її на екрані; 9. формування сигналів початкових умов режиму ЛУПА для блоку БИВ
П 1 • ПРОГРАМА П 1 слугує для формування первинних розгорток, для чого виконується розрахунок точок початку інтегрування Хи, Уи (існують рівнозначні позначення Хн, Ун) в підпрограмах ПП 2, ПП 4 та швидкості інтегрування за координатами Х та У (тобто функції Sin та Cos , де — кут повороту антени РЛС) в підпрограмах ПП 1 та ПП 3.
П 2 • ПРОГРАМА П 2 є програмою видання та слугує для розрахунку координат початку сектора за координатами Х та У в режимах без зміщення координат БС, із зміщенням координат С та в режимі ЛУПА БИО (C, БС). Програма також забезпечує перерахунок координат маркера оператора з відносної системи координат до абсолютної. Програма П 2 містить дві підпрограми ПП 1 та ПП 2.
П 3 • ПРОГРАМА П 3 забезпечує перерахунок координат вторинної інформації, що надходить від СВ-1 з типом координат ТК=1 (ЕТ, лінії, ММ) з полярної системи координат до прямокутної. Підпрограми ПП 1 та ПП 3 виконують розрахунок Sin та Cos за значенням , що надходить від СВ-1, а підпрограми ПП 2 та ПП 4 розраховують абсолютні координати екстраполяційних точок Хет, Ует за значенням Дет, що надходить, та розрахованими функціями Sin та Cos .
П 4 • ПРОГРАМА П 4 виконує перерахунок координат вторинної інформації з абсолютної системи координат до відносної. У підпрограмах ПП 1 та ПП 3 виконуються записи вихідних даних: Sin , Cos , R, (довжина вектора). У підпрограмах ПП 2 та ПП 4 виконується розрахунок відносних координат точок інтегрування Хі, Уі (Хн, Ун).
Таблиця 1 Програми ЦВУ підпрограми ПП 1 ПП 2 ПП 3 ПП 4 П 1 „ формування розгортки” Sin Х н Cos У н П 2 „ видачі” У нс У мо Х нс Х мо — — П 3 “ перерахунку систем координат” Sin Х ет Cos У ет П 4 „ прийому” Sin R Х н Cos R У н
3. Склад обчислювального вузла РМ за структурною схемою (рис. 49, с. 30)
4. Принцип роботи ВУ під час реалізації програми П 2 (рис. 49, с. 30)
1. Перерахунок координат початку сектора в режимі П 2 НС БС
1. Перерахунок координат початку сектора в режимі П 2 НС БС Унс = Уц — Уц/Му 1 Хнс = Хц — Хц/Мх 1 Приклад М=1600 Унс=0. 0000… М=800 Унс=0. 010000… М=400 Унс=0. 011000… М=200 Унс=0. 011100… М=100 Унс=0. 011110…
2. Обчислення координат в режимі видання інформації МАРКЕРА ОПЕРАТОРА з РМ П 2 МО КР
2. Обчислення координат в режимі видання інформації МАРКЕРА ОПЕРАТОРА з РМ П 2 МО КР Умо(ак) = Умо(ок)/Му 1 + Унс Хмо(ак) = Хмо(ок)/Мх 1 + Хнс Приклад М=200 МО(Д=100 км, АЗ=90 0 ) Умо(ок) = 0. 11000… Унс=0. 011100… Умо(ак) = 0. 0001100…+ +0. 011100… = 0. 1000100…
3. Розрахунок координат початку сектора в режимі СО СМЕЩЕНИЕМ (С) П 2 НС С
3. Розрахунок координат початку сектора в режимі СО СМЕЩЕНИЕМ (С) П 2 НС С 1 етап Умо(ак) = Умо(ок)/Му 1 + Унс 2 етап Унс’ = Умо(ак)-Уц / Му 1 Приклад М=200 МО(Д=100 км, АЗ=90 0 ) Умо(ок) = 0. 11000… Унс=0. 011100… Умо(ак) = 0. 1000100… Унс’= 0.
4. Перерахунок координат початку сектора в режимі С та БС П 2 НС С БС
4. Перерахунок координат початку сектора в режимі С та БС П 2 НС С БС 1 етап Умо(ак) = Умо(ок)/Му 1 + Унс 2 етап Унс’ = Умо(ак)-Умо(ок) / Му 2 Приклад М 1=200 М 2=100 км МО(Д=100 км, АЗ=90 0 ) Умо(ок) = 0. 11000… Унс=0. 011100… Умо(ак) = 0. 1000100… Унс’= 0.
Запуск програми П 2 НС БС ПРМ Комутатор В Формиров. прогр. РМ Формиров. СУ УОП СВ-1 А 3, Д 3 БС, СМ Тр. Выд Тр. Б. А П, ПП Р. Выд Пуск А УСА
Таблиця 2 Програма П 2 ПП 1 ПП 2 К У НС = У Ц — У Ц /М У К Х НС = Х Ц — Х Ц /М Х К 1 СБ“ 1”, ЗАП ПСР К 2 Выз М КН , З Н В, ЗАП Р Г М, ОПР 5, Выз М У , СДП ПСР К 2 ОПР 4 Выз М Х , СДП ПСР К 3 ОПР 1 Выз М У , СДП ПСР К 3 ОПР 6 Выз М Х , СДП ПСР К 4 Выз М У , СДП ПСР К 4 Выз М Х , СДП ПСР К 5 Выз М У , СДП ПСР К 5 Выз М Х , СДП ПСР К 6 Выз ПСР, З Н В, “+1”, СБ“ 1”, ОПРМ/Р 3 ЗАП У НС К 6 Выз ПСР, З Н В, “+1”, СБ“ 1”, ОПМ/Р 2 ЗАП Х НС
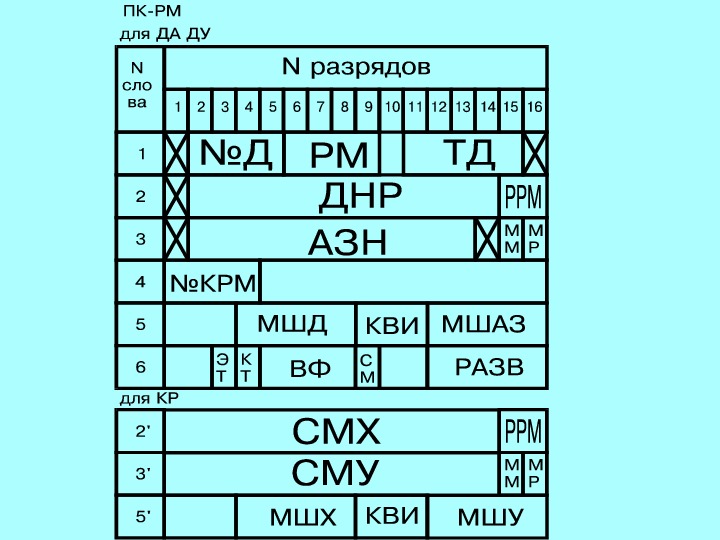
Перевірка роботи програми П 2 (рис. 59, с. 36) 1. Увімкнути РМ, встановивши на ПРМ клавіші АК, КР, 90, 400, БС. 2. На ПК-РМ увімкнути тумблери в позицію ИМ, П 2 Р, ОСТ. ЦВУ. 3. Натиснути на ПРМ СМ, при цьому на ПК-РМ мають засвітитися лампочки ОСТ. та 1 р (інформація). 4. На ПК-РМ увімкнути Р (разові такти) та вимкнути ОСТ ЦВУ (гасне лампочка ОСТ). 5. Натискуючи кнопку ПУСК по командно (кожна команда виконується чотириразовим натисканням кнопки. Команда К 2 може з’явитись режим 4 такт) за табл. 2 простежимо виконання програми П 2 та остаточний результат на виході СД (ПК-РМ підключається до виходу СД).
ЛІТЕРАТУРА: 1. Устрій та бойове застосування КЗА 86 Ж 6. Частина 1. (за редакцією Сторубльова О. І. ) Навчальний посібник. — К. , 2001. (С. 68 -76) 2. Аппаратура КСА 86 Ж 6. Альбом схем. — К. , 1990. – 130 с.