
CAN -Controller Area Network (локальная сеть контроллеров )

 Поддержка : CiA -CAN in")

 устанавливается свой приоритет")


 – переносит данный от")
, поле арбитража (Arbitration Field), поле контроля")








38186-seminar_can.ppt
- Количество слайдов: 16
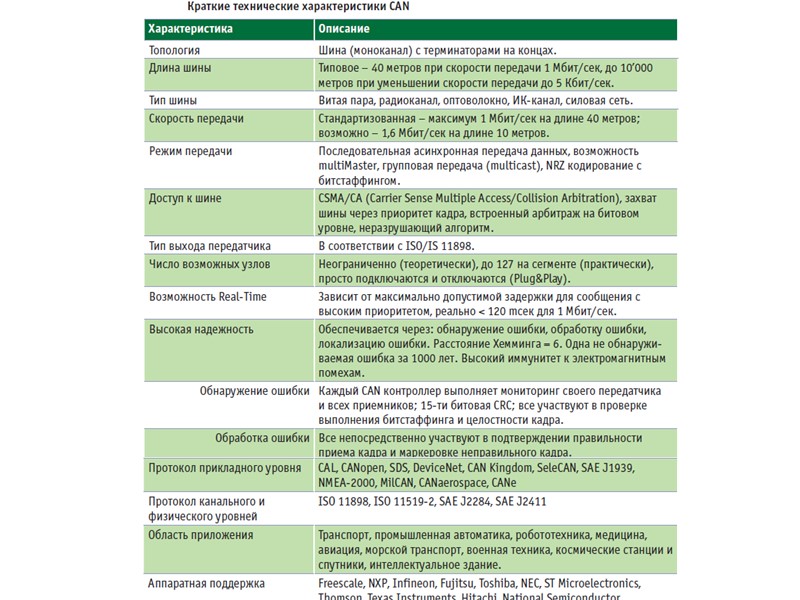
CAN -Controller Area Network (локальная сеть контроллеров ) Поддержка : CiA -CAN in Automation (CAN в Автоматизации) Версии, используемые в настоящее время: 2.0A и 2.0B Эти версии в открытом доступе
Разработан в 1983 г. компанией Robert Bosch GmbH Зарождался как автомобильный стандарт Первые микросхемы CAN – в 1987 г. фирмы Philips и Intel С 1993 г. является международным стандартом ISO 11898-1 В настоящий момент широко используется в автоматизации зданий, в различных сферах промышленного управления, в автомобиле строении
CAN характеризуется следующими основными свойствами: Каждому сообщению (а не устройству) устанавливается свой приоритет Гарантированная величина паузы между двумя актами обмена Гибкость конфигурирования и возможность модернизации системы Широковещательный прием сообщений с синхронизацией времени Допустимость нескольких ведущих устройств (многомастерная сеть) Способность к обнаружению ошибок и сигнализации об их наличии Автоматический повтор передачи сообщения, доставленных с ошибкой, сразу, как только сеть станет свободной Автоматическое различие сбоев и отказов с возможностью автоматического отключения отказавших модулей
Физический уровень Обеспечивает надежную передачу битов, игнорируя содержание передаваемой информации Способы передачи : подавляющее большинство случаев – витая пара плоский кабель, оптоволокно, радиоканал Соотношение скорости передачи от длины шины:
Канальный уровень Передача сообщений фреймами: DATA FRAME (фрейм данных) – переносит данный от передатчика к приемнику REMOTE FRAME (фрейм вызова) – передается одним из устройств, чтобы получить от другого данные в формате DATA FRAME ERROR FRAME (фрейм ошибок) – передается любым устройством, обнаружившим ошибку на шине OVERLOAD FRAME (фрейм перегрузки) – используется для запроса дополнительной задержки между предыдущими и последующими данными
DATA FRAME Начало фрейма (Start Of Frame), поле арбитража (Arbitration Field), поле контроля (Control Field), поле данных (Data Field), поле циклического избыточного кода (CRC Field), поле уведомлений о приеме (ACKnowledgement Field) и End Of Frame . Поле данных может иметь нулевую длину
Формат идентификатора В рамках одной сети необходимо, чтобы каждое устройство имело уникальный адрес в диапазоне от 0 до 6. Адрес 7 используется как широковещательный. Любая посылка, переданная со значением поля source_addr, равным 7, будет воспринята всеми приводами. Идентификатор экстренного останова: id = 0x41 com = 1, source_addr = 0, sink_addr = 1 id =1000001 = 41(hex)
CANBus Скорость до 1Mb/s, зрелый стандарт, жесткое РВ , высокая надежность, 127 узлов на сегменте Электроавтоматика станка
Управление сервоприводом типа СПШ
Топология CAN-устройств Требования, которым соответствует интерфейс: Жесткое реальное время Метод арбитража для определения приоритета сообщения Широковещательная передача Высокая надежность Зрелый стандарт
CANBus Варианты управления по протоколу CAN Протокол управления СПШ по шине CAN Технологический протокол СПШ Протокол реального времени Все команды имеют свой приоритет 11-ти битный идентификатор (ID10-ID0) Идентификатор сообщения в шине CAN определяет приоритет команды Протокол не реального времени Для настройки привода и анализа его работы Запись и чтение любых параметров Передается с низким приоритетом
Окно управляющей программы Текстовое окно (параметры загрузки библиотеки CAN карточки, версия ее драйвера, статус инициализации) Протокол CAN Технологический протокол Текстовое окно (текущие значения скорости, положения, статус канала, состояние приводов)
Реализация протокола в СЧПУ
Спасибо за внимание!