

Материалы к лекции 7.ppt
- Количество слайдов: 39
 «Автоматизация производственных процессов в машиностроении»
«Автоматизация производственных процессов в машиностроении»
 6. 4. Манипуляторы, автооператоры, промышленные роботы
6. 4. Манипуляторы, автооператоры, промышленные роботы
 Манипулятор с ручным управлением
Манипулятор с ручным управлением
 Манипулятор с автоматическим управлением
Манипулятор с автоматическим управлением
 Автооператор
Автооператор
 Промышленный робот
Промышленный робот
 Степени подвижности
Степени подвижности
 системой координат") Робот с полярной (сферической) системой координат
Робот с полярной (сферической) системой координат
 Робот с полярной системой координат Мейкер 100 фирмы 'Юнайтед стейтс роботс'
Робот с полярной системой координат Мейкер 100 фирмы 'Юнайтед стейтс роботс'
 Робот с прямоугольной системой координат
Робот с прямоугольной системой координат
 Робот с вращающейся системой координат
Робот с вращающейся системой координат
 Робот с вращающейся системой координат DAROS PT 300 V фирмы 'Дайнитисикесу'
Робот с вращающейся системой координат DAROS PT 300 V фирмы 'Дайнитисикесу'
 Робот с цилиндрической рабочей зоной
Робот с цилиндрической рабочей зоной
 Cobra i 600
Cobra i 600
 Робот с цилиндрической рабочей зоной Робот Адепт. Уан фирмы 'Адепт текнолоджи'
Робот с цилиндрической рабочей зоной Робот Адепт. Уан фирмы 'Адепт текнолоджи'
 схема робота б) рабочая зона 1 – устройство управления 2 – силовой агрегат") а) схема робота б) рабочая зона 1 – устройство управления 2 – силовой агрегат 3 – подвижная платформа 4 – колонна 5 – поворотный стол 6 – траверса 7 – шток 8 – захватное устройство
а) схема робота б) рабочая зона 1 – устройство управления 2 – силовой агрегат 3 – подвижная платформа 4 – колонна 5 – поворотный стол 6 – траверса 7 – шток 8 – захватное устройство
 Встроенный робот Мейкер 100 фирмы 'Юнайтед стейтс роботс'
Встроенный робот Мейкер 100 фирмы 'Юнайтед стейтс роботс'
 Напольный стационарный робот
Напольный стационарный робот
 Напольный подвижный робот
Напольный подвижный робот
 Портальный робот
Портальный робот
 Портальный робот
Портальный робот
 Портальный робот
Портальный робот
 KUKA Titan 1000
KUKA Titan 1000
 7. Гибкое автоматизированное производство
7. Гибкое автоматизированное производство
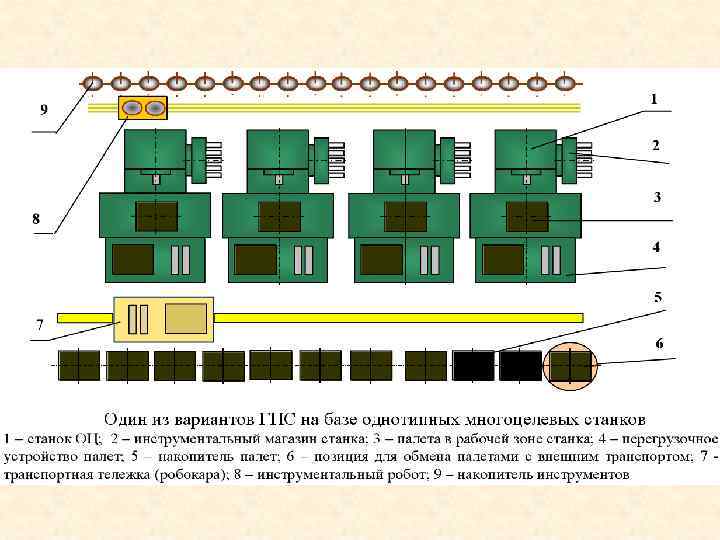
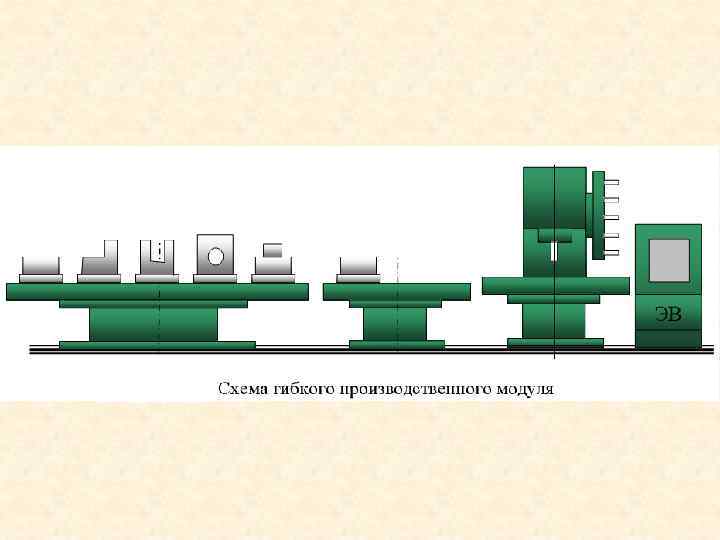
 7. 1. Виды гибких производственных систем
7. 1. Виды гибких производственных систем
 Состав ГАП
Состав ГАП
 Роботизированный технологический комплекс
Роботизированный технологический комплекс
 РТК для сварки
РТК для сварки
 РТК механической обработки 1 – робот 2 – магазин 3 – конвейер 4 – многошпиндельный сверлильный станок
РТК механической обработки 1 – робот 2 – магазин 3 – конвейер 4 – многошпиндельный сверлильный станок
 РТК шинного производства 1 – рольганг 2 – гидравлический манипулятор 3 – гидростанция 4 – захват 5 – пульт управления
РТК шинного производства 1 – рольганг 2 – гидравлический манипулятор 3 – гидростанция 4 – захват 5 – пульт управления
 Сварочный РТК для кузова автомобиля фирма COMAU, роботы СМАРТ 1 – рама 2 – кузов 3 – транспортная тележка 4 – напольные роботы 5 – подвесные роботы
Сварочный РТК для кузова автомобиля фирма COMAU, роботы СМАРТ 1 – рама 2 – кузов 3 – транспортная тележка 4 – напольные роботы 5 – подвесные роботы
 Сварочный РТК портальной конструкции фирма Renault 1 – заготовка кузова 2 – мостовая конструкция 3 – каретки 4 – манипулятор робота
Сварочный РТК портальной конструкции фирма Renault 1 – заготовка кузова 2 – мостовая конструкция 3 – каретки 4 – манипулятор робота
 7. 2. Гибкость производственных систем
7. 2. Гибкость производственных систем
 Индекс гибкости
Индекс гибкости
 Пример
Пример
 Экономический показатель
Экономический показатель