7cadade5a121407f14bba851f6eb8272.ppt
- Количество слайдов: 70


 第一節 第二節 第三節 第四節 第五節 第六節 舵的作用原理和對舵機的要求 液壓舵機的 作原理和基本組成 液壓舵機的轉舵機構")
第 12章 舵機(steering gear) 第一節 第二節 第三節 第四節 第五節 第六節 舵的作用原理和對舵機的要求 液壓舵機的 作原理和基本組成 液壓舵機的轉舵機構 液壓舵機的遙控系統 舵機液壓系統實例 液壓舵機的管理

Ram Actuator Basically there are two types of electro hydraulic steering gear working principals: The ram (or cylinder) type and the rotary vane type.

The standard model is used on: vessels except tankers with single rudder All installation above 100, 000 DWT Safety: Safety against single failure on the hydraulic system, according to SOLAS rules.


System components Wheel house Engine control room Steering gear
 variant of Manual called")
Steering modes Three most used steering modes. Non follow-up (Manual) variant of Manual called Follow-up A Autopilot Non Follow-up (manual) Non Follow-up is totally manual control of the rudder movement, from wheel-house or, in emergency situations, from the steering gear compartment.

Follow-up mode is a variant of manual, it allows the rudder to be locked in any rudder angle, and the system will hold it there until you move it again. Autopilot ship will automatically find its way to a pre. The set position point along a pre-set route. If the ship is forced out of course, the autopilot will use the rudder to get the ship back on course

Speed of rudder For regular ships the rudder must be able to turn minimum 35 degrees to each sides. To meet the rules concerning rudder angle velocity, the rudder must be able to turn from 35 degrees to 30 degrees on the other side in maximum 28 seconds. This is called the minimum angle velocity.



第 12章 舵機 steering gear 第一節 舵的作用原理和對舵機的要求

一、舵的作用: 船舶的操縱性,是船舶的主要 航行性能之一。舵是船舶操縱裝 置的一個重要部件。 舵是一塊平板或具有流線型截 面的板,稱為舵葉。裝在船尾中 縱剖面或對稱於中縱剖面的位置 上。它垂直地浸沒在水中,並能 繞舵軸轉動。
在大 海裡任憑風浪擺佈。無主動航向的船不僅不能 保證航行的安全,而且是不能到達目的港的。")
舵是船舶的一種十分重要和不可缺少的專用舾 裝設備。可以想像,如果船沒有舵,或舵失靈, 就像汽車沒有方向盤一樣,將無法行駛)在大 海裡任憑風浪擺佈。無主動航向的船不僅不能 保證航行的安全,而且是不能到達目的港的。
用來保持或改變船舶在水中運動 方向的專用設備。 舵有兩大功能: 一是保持船舶預定航向的能力,稱為航向穩定性; 二是改變船舶運動方向的能力,稱回轉性。 通常把二者統稱為船舶的操縱性。")
舵是舵手(駕駛人員)用來保持或改變船舶在水中運動 方向的專用設備。 舵有兩大功能: 一是保持船舶預定航向的能力,稱為航向穩定性; 二是改變船舶運動方向的能力,稱回轉性。 通常把二者統稱為船舶的操縱性。
舵的 作用原理是當水流以某沖角沖至舵葉上時,便產生了流體 動力,此作用力通過舵杆傳遞並船體上,從而迫使船舶轉 向,也就達到了調整航向的目的。")
船舵主要由舵葉和舵杆組成,舵葉是產生水壓力的部分, 舵杆的作用是轉動舵葉和保證舵葉具有足夠的強度)舵的 作用原理是當水流以某沖角沖至舵葉上時,便產生了流體 動力,此作用力通過舵杆傳遞並船體上,從而迫使船舶轉 向,也就達到了調整航向的目的。

舵從帆船時代的簡單平板舵發展到今天的流線型舵,不斷 得到改進,現普通舵和特種舵已有十幾種類型。近個時期, 隨著科學技術的發展,還出現了一些推進設備也兼有舵設 備的功能。
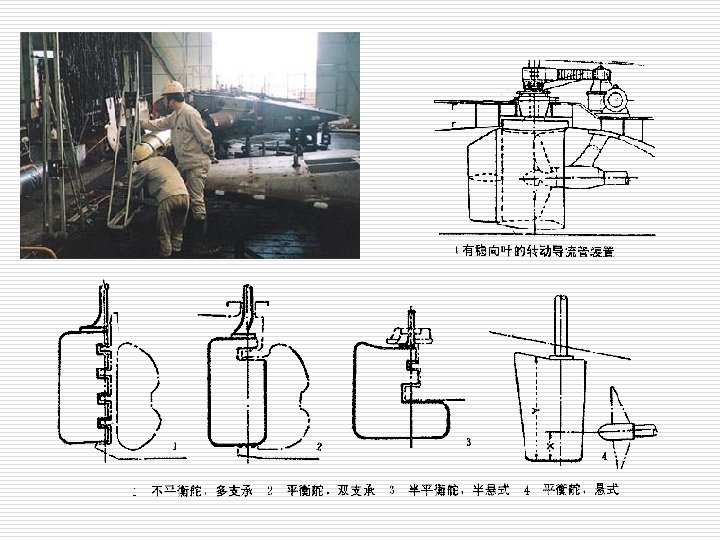
按舵的支承情況來分 1.多支承舵:船體尾柱連有三個以上的舵鈕。 2.半懸式舵:下支承的位置在舵的半高處。 3.懸式舵:掛在舵杆上的。 4.雙支承舵:除了上支承兒還有一個安在舵根 的下支承。 (二)按舵杆軸線位置來分 1.不平衡舵 :舵葉位於舵杆軸線之後。 2.半平衡舵:一般就是半懸式舵。 3.平衡舵:舵杆軸線位於舵葉前緣後一")
舵的種類很多,分類的方法也很多,有按支承情況、舵杆位置、剖 面形狀分類的,也有按結構形式和使用功能分的。 舵的分類: (一)按舵的支承情況來分 1.多支承舵:船體尾柱連有三個以上的舵鈕。 2.半懸式舵:下支承的位置在舵的半高處。 3.懸式舵:掛在舵杆上的。 4.雙支承舵:除了上支承兒還有一個安在舵根 的下支承。 (二)按舵杆軸線位置來分 1.不平衡舵 :舵葉位於舵杆軸線之後。 2.半平衡舵:一般就是半懸式舵。 3.平衡舵:舵杆軸線位於舵葉前緣後一 定的距離。一般在舵葉前緣後的1/ 3處。
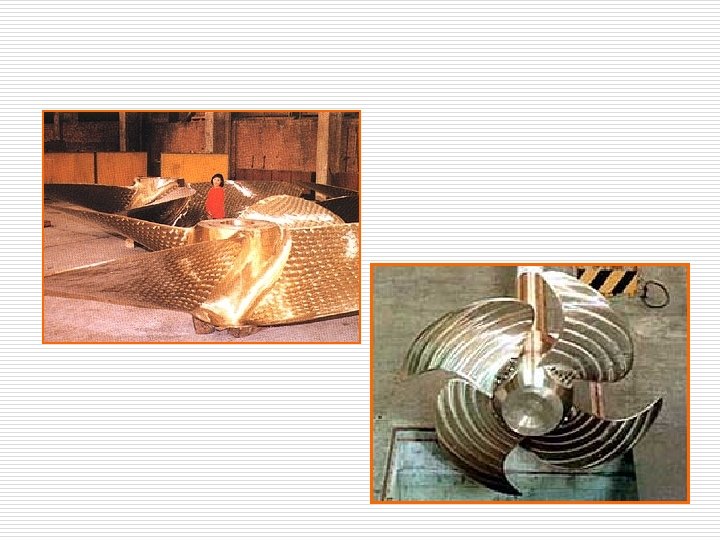
按舵剖面形狀來分 1)平板舵-僅用一塊平板做成的 最簡單的舵; 2)改良形平板舵-在平板舵上以 木質板,其外形與流線型舵 相似的舵; 3)流線型舵-舵的翼剖面是機翼 型的舵,如果帶有固定舵柱 的就稱為固定舵柱型流線型 舵; 4)反應舵-是將流線型平衡舵以 螺旋軸為界,按一定流程進行 上下扭曲後的舵,據說這種舵 可以提高推進效率4")
(三)按舵剖面形狀來分 1)平板舵-僅用一塊平板做成的 最簡單的舵; 2)改良形平板舵-在平板舵上以 木質板,其外形與流線型舵 相似的舵; 3)流線型舵-舵的翼剖面是機翼 型的舵,如果帶有固定舵柱 的就稱為固定舵柱型流線型 舵; 4)反應舵-是將流線型平衡舵以 螺旋軸為界,按一定流程進行 上下扭曲後的舵,據說這種舵 可以提高推進效率4 -6%左右。


反應舵 是指舵葉的導邊,以螺旋槳軸線為界分上下兩段向 左右扭曲的一種舵,其扭曲偏度以在導邊、螺旋槳 槳軸處最大,向後、向上下兩端減少,到一定位置 後, 槳葉剖面仍為對稱流線型。由於螺旋槳的旋轉 作用,不僅具有向後的線速度,而且具有旋轉的角 速度。因此,流向舵的水流會產生一個攻角,當適 當地改變舵葉處攻 角的大小,即調整舵的前緣形狀, 在舵上便會產生一個附加的推力,使軸向誘導速度 增大。對於高速船來講,反應舵比常規的半懸掛舵 能帶來更多的好處,典型應用 包括:集裝箱船、軍 艦、郵輪等。反應舵的優點:消除氣泡腐蝕、提高 航速、安裝、維護費用低、高效節能,節能效果可 達 3%-6%、提高螺旋槳效率。
的適當位置加裝一個外型為 對稱機翼剖面的回轉體或近似於橢圓形的整流帽,由於整流帽填充了通 常是渦流低壓區的空間,使得螺旋槳後部的亂流得到改善。這樣不僅提 高推進效率,還能降低船尾的震動,據稱在一般舵上加裝整流帽後,可 以增加航速 0.")
特種舵 為了提高船舶的推進效率和改善操縱性能,特別是提高船在低速航行 時的操縱性,而對普通舵進行開發,或者普通舵與別的設備組合的具有 特種型式的舵叫做特種舵。如主動舵、整流帽舵、襟翼舵、轉子舵等。 1、主動舵-在普通流線型舵的中部後緣處加裝一個帶有導流管的小螺 旋槳,此槳由裝在舵體內的潛水電機或液壓馬達驅動,依靠舵、槳產生 的力改變船的航向。該種舵最大的特點是在低速或倒航時仍具有良好的 操縱性,而且能提高船的回轉性能。還具有低速推進裝置的功能。 2、整流帽舵-在普通舵(一般是流型舵)的適當位置加裝一個外型為 對稱機翼剖面的回轉體或近似於橢圓形的整流帽,由於整流帽填充了通 常是渦流低壓區的空間,使得螺旋槳後部的亂流得到改善。這樣不僅提 高推進效率,還能降低船尾的震動,據稱在一般舵上加裝整流帽後,可 以增加航速 0. 3 -0. 5。

主 動 舵

3、襟翼舵-將舵葉做成主舵和子舵兩部分,子舵即是襟翼舵。當主舵 轉動一個角度時,子舵相對主舵再轉動另一個角度。這樣一來,就明顯 地提高了舵效,改善了操縱性能。此種舵的缺點是結構和製造較為複雜。 4、轉子舵-是在普通舵的前緣裝一高速旋轉的圓柱,由於圓柱的高速 旋轉,產生了一股側向流,此流即提高舵的升力,同時增加了繞舵的環 流,又增加了升力,從而明顯地提高了船的回轉性能,此種舵多被回轉 性能要求高的船所採用。

襟翼舵 襟翼舵的優勢:優 化的平衡比;優良 的操作性能,從而 可以採用較小的舵 機;可以提供相當 於常規舵 1. 5— 1. 7 倍的升力;減少油 耗;無污染;容易 安裝從而提高造船 效率;主要部件來 自於全球頂級供應 商;舵角最大可達 45度;較小回轉半 徑和參與動態定位 系統;較小的振動。
 T為船舶最大吃水(米) μ為實用係數,其值隨船舶類型、尺度、船速而異(見下表): 各種船舶的舵面(以L·T的%表示)")
舵的形狀與面積: 舵的外形大都作成方形或倒梯形,後者多用在懸式舵上。如果要求有 較大的舵壓力,則可將舵的上端後部提高,與船尾部外形相配合。 舵的高度主要由船尾部吃水和尾部外形來決定。但舵的下端,不應超 過螺旋槳圓盤面的下線。 舵面積的大小,對船的操縱性能影響較大。浸在水中的舵面積,一般 不是根據回轉直徑來決定的,而是以船體水下側投影面積的百分率來計 算。其公式如下: S=μ·L·T 式中:S為舵面積 L為船舶水線間長(米) T為船舶最大吃水(米) μ為實用係數,其值隨船舶類型、尺度、船速而異(見下表): 各種船舶的舵面(以L·T的%表示)
 船舶類型 μ 單槳船 雙螺旋槳船 油 輪 巨型客輪 快速客輪 沿海船舶 1. 6~ 1. 9%")
各種船舶的舵面(以L·T的%表示) 船舶類型 μ 單槳船 雙螺旋槳船 油 輪 巨型客輪 快速客輪 沿海船舶 1. 6~ 1. 9% 1. 5~ 2. 1% 1. 3~ 1. 9% 1. 2~ 1. 7% 1. 8~ 2% 2~ 3. 3% 內 河 船 客 輪 內河拖輪 長江拖輪 駁 船 方 舟 4~ 8% 6. 5~ 13% 7~ 9% 4. 5~ 7% 8%以上 軍 用 艦 艇 航空母艦 巡洋艦 驅逐艦 輔助艦 魚雷艇 潛水艇 2. 3~ 2. 85% 2. 4~ 2. 8% 2. 6~ 2. 85% 2. 11~ 2. 45% 2. 5~ 3. 3% 1. 85~ 2. 32% 海 輪
偏轉 (2)横移 (3)减速")
水作用力 F 對船舶運動的影響 在船舶重心上加一對大小等於F,方向相反的力F 1、F 2 1. 轉船力矩 横向推力 阻力 轉舵效應; (1)偏轉 (2)横移 (3)减速

1. 轉船力矩隨舵角而變化; 2. 轉船力矩有最大值Mmax 3. 海船的轉船力矩最大值出 現在 30°~ 35°之間; 内河船的轉船力矩最大值 出現在 35°~ 45°之間。 CL升力系数 CD阻力系数 CX压力中心系数
水動力矩與舵葉的面積A和舵葉處水流速度的平 方成正比,並隨舵角α的增大而增大。 (2)不平衡舵因X=Xc,故當船舶正航並向一舷轉 舵時,水動力矩將始終為正(指與舵葉轉向相反), 而回舵時則變為負(指與舵葉轉向相同)。平衡舵因 Xc=X-Z,小舵角時由於壓力中心O處於舵杆軸線 的前方,故Ma為負;只有當舵角增大到某一數值之 後,Ma才會因O點移到軸線之後而變為正值。舵杆 軸線之前的舵葉面積A‘與整個舵葉面積A之比,稱 為平衡係數,用K表示。圖示出了舵葉具有不同平衡 係數時的水動力矩曲線。由圖可見,平衡係數越大, 舵葉的最大水動力矩越小,即舵機所需的公稱轉舵 扭矩較小。 (3)船舶倒航時,由於舵葉後緣變成了導邊,壓力中")
(1)水動力矩與舵葉的面積A和舵葉處水流速度的平 方成正比,並隨舵角α的增大而增大。 (2)不平衡舵因X=Xc,故當船舶正航並向一舷轉 舵時,水動力矩將始終為正(指與舵葉轉向相反), 而回舵時則變為負(指與舵葉轉向相同)。平衡舵因 Xc=X-Z,小舵角時由於壓力中心O處於舵杆軸線 的前方,故Ma為負;只有當舵角增大到某一數值之 後,Ma才會因O點移到軸線之後而變為正值。舵杆 軸線之前的舵葉面積A‘與整個舵葉面積A之比,稱 為平衡係數,用K表示。圖示出了舵葉具有不同平衡 係數時的水動力矩曲線。由圖可見,平衡係數越大, 舵葉的最大水動力矩越小,即舵機所需的公稱轉舵 扭矩較小。 (3)船舶倒航時,由於舵葉後緣變成了導邊,壓力中 心離開舵杆軸線的距離因而增大,致使舵壓力的力 臂大大增加,故在其它條件相同時,同一舵角下倒 航時的水動力矩就會超過正航時的水動力矩。 轉 船 力 矩 水 動 力 矩
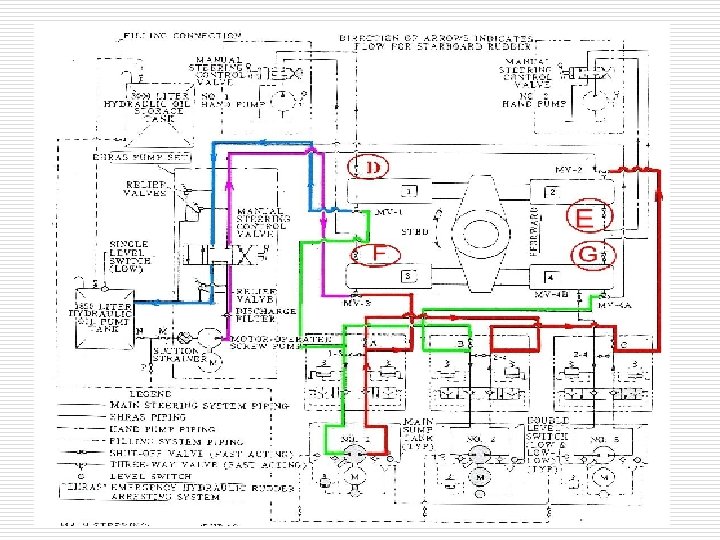
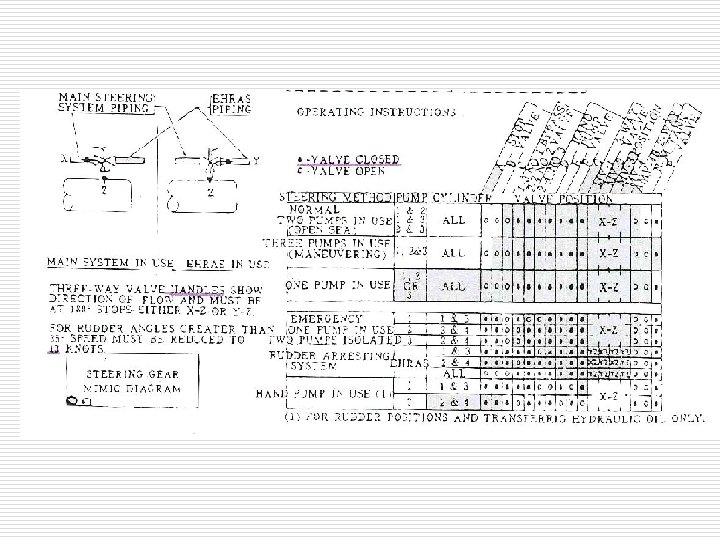
根據《國際海上人命 安全公約)(SOLAS公約)的規定,對舵機的基本技術要求是: (1)必須具有一套主操舵裝置和一套輔操舵裝置;或主操舵裝置有兩 套以上的動力設備。當其中之一失效時,另一套應能迅速投入 作。 主操舵裝置應具有足夠的強度並能在船舶處於最深航海吃水並以 最大營運航速前進時將舵自任何一舷 35°轉至另一舷的35 °,並且 於相同的條件下,自一舷的35°轉至另一舷的30°所需的時間不超過 28 s。此外,在船以最大速度後退時應不致損壞。")
對舵機的要求 舵機是保持或改變船舶航向,保證安全航行的重要設備,一旦失 靈,船即會失去控制,甚至事故。因此,(1996)根據《國際海上人命 安全公約)(SOLAS公約)的規定,對舵機的基本技術要求是: (1)必須具有一套主操舵裝置和一套輔操舵裝置;或主操舵裝置有兩 套以上的動力設備。當其中之一失效時,另一套應能迅速投入 作。 主操舵裝置應具有足夠的強度並能在船舶處於最深航海吃水並以 最大營運航速前進時將舵自任何一舷 35°轉至另一舷的35 °,並且 於相同的條件下,自一舷的35°轉至另一舷的30°所需的時間不超過 28 s。此外,在船以最大速度後退時應不致損壞。 輔操舵裝置應具有足夠的強度,且能在船舶處於最深航海吃水, 並以最大營運航速的一半但不小於 7 kn前進時,能在不超過60 s内將 舵自任一舷的15 °轉至另一舷的15 ° 。
主操舵裝置應在駕駛台和舵機室都設有控制器;當主操舵裝置設置 兩台動力設備時,應設有兩套獨立的控制系統,且均能在駕駛室控制。 但如果採用液壓遙控系統,除 1萬Gt以上的油輪(包括化學品船、液化 氣船,下同)外,不必設置第二套獨立的控制系統。 (3)對舵柄處舵杆直徑大於 230 mm(不包括航行冰區加強)的船應設 有能在 45 s內向操舵裝置提供的替代動力源。這种動力源應為應急電源 位於舵機室內的獨立動力源,其容量至少應能向符合輔操舵裝置要求的 一台動力設備及其控制系統和舵角指示器提供足夠的能源。此獨立動力 源只准專用於上述目的。對1萬Gt以上的船舶,它應至少可供")
(2)主操舵裝置應在駕駛台和舵機室都設有控制器;當主操舵裝置設置 兩台動力設備時,應設有兩套獨立的控制系統,且均能在駕駛室控制。 但如果採用液壓遙控系統,除 1萬Gt以上的油輪(包括化學品船、液化 氣船,下同)外,不必設置第二套獨立的控制系統。 (3)對舵柄處舵杆直徑大於 230 mm(不包括航行冰區加強)的船應設 有能在 45 s內向操舵裝置提供的替代動力源。這种動力源應為應急電源 位於舵機室內的獨立動力源,其容量至少應能向符合輔操舵裝置要求的 一台動力設備及其控制系統和舵角指示器提供足夠的能源。此獨立動力 源只准專用於上述目的。對1萬Gt以上的船舶,它應至少可供 作 30 min,对其它船舶为 10 min。
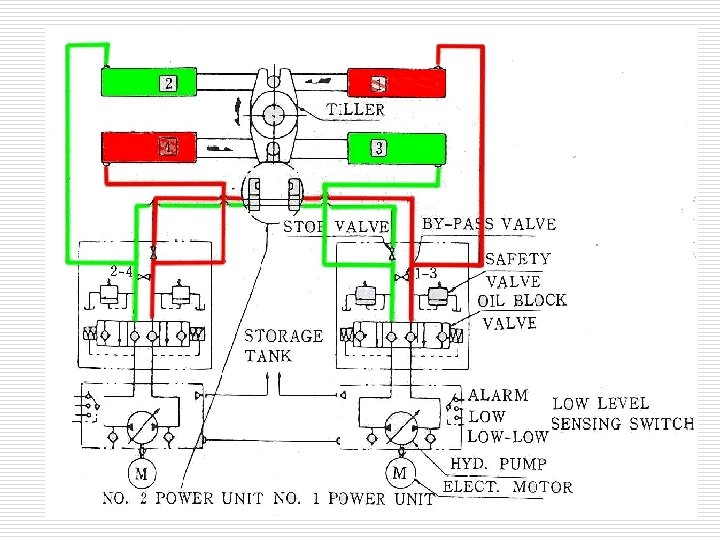
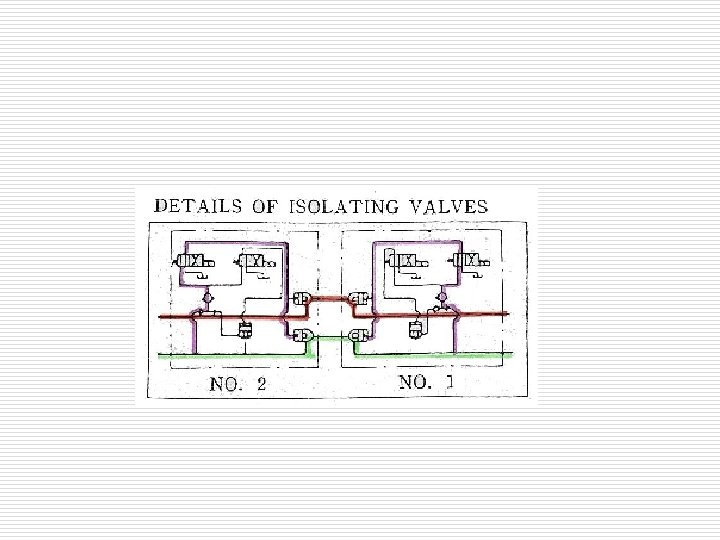
操舵裝置應設有有效的舵角限位器。以動力轉舵的操舵裝置,應 裝設限位元開關或類似設備,使舵在到達舵角限位器前停住。 (5)對1萬Gt以上的油船、化學品船、液化氣體運輸船尚有如下一些 附加要求:當發生單項故障(舵柄、舵扇損壞或轉舵機構卡住除外)而 喪失操舵能力時,應能在 45 s內重新獲得操舵能力。 舵機可由兩個均能滿足主操舵裝置要求的獨立的動力轉舵系統組成; 或至少有兩個相同的動力轉舵系統,在正常運行時同時能滿足主操舵 裝置要求,其中任一系統中液壓流體喪失時應能被發現,有缺陷的系 統應能自動隔離,使其餘動力轉舵系統安全運行。 有的轉舵機構雖不能分隔成兩部分,但如經過嚴格的應力分析(包 括疲勞和斷裂分析)、密封設計、材料選用和試驗,則也可允許用於 1")
(4)操舵裝置應設有有效的舵角限位器。以動力轉舵的操舵裝置,應 裝設限位元開關或類似設備,使舵在到達舵角限位器前停住。 (5)對1萬Gt以上的油船、化學品船、液化氣體運輸船尚有如下一些 附加要求:當發生單項故障(舵柄、舵扇損壞或轉舵機構卡住除外)而 喪失操舵能力時,應能在 45 s內重新獲得操舵能力。 舵機可由兩個均能滿足主操舵裝置要求的獨立的動力轉舵系統組成; 或至少有兩個相同的動力轉舵系統,在正常運行時同時能滿足主操舵 裝置要求,其中任一系統中液壓流體喪失時應能被發現,有缺陷的系 統應能自動隔離,使其餘動力轉舵系統安全運行。 有的轉舵機構雖不能分隔成兩部分,但如經過嚴格的應力分析(包 括疲勞和斷裂分析)、密封設計、材料選用和試驗,則也可允許用於 1 萬Gt以上、10萬Gt以下的油船、化學品船、液化氣體運輸船。在這 種情況下,只對管系或動力設備而不對轉舵機構提出下列要求:即當 發生單一故障時應能在 45 s内恢复操舵能力。
能被隔斷的、由於動力源或外力作用能產生壓力的液壓系統任何 部分均應設置安全閥。安全閥開啟壓力應不小於 1. 25倍最大 作壓 力;安全閥能夠排出的量應不小於液壓泵總流量的110%,在此情 况下,压力的升高不应超过开启压力的10%,且不應超過設計壓力 值。")
6)能被隔斷的、由於動力源或外力作用能產生壓力的液壓系統任何 部分均應設置安全閥。安全閥開啟壓力應不小於 1. 25倍最大 作壓 力;安全閥能夠排出的量應不小於液壓泵總流量的110%,在此情 况下,压力的升高不应超过开启压力的10%,且不應超過設計壓力 值。

第二節 液壓舵機的 作原理和基本組成
 2. 舵機 (提供轉舵動力) 3. 轉舵機構 (對舵柱產生轉舵力矩) 4. 舵葉 (產生轉船力矩) 分類:")
基本組成: 1. 遠操機構 (轉遞操舵信號) 2. 舵機 (提供轉舵動力) 3. 轉舵機構 (對舵柱產生轉舵力矩) 4. 舵葉 (產生轉船力矩) 分類: 1. 按遠操機構分 機械、電力、液壓 2. 按舵機能源分 人力、氣動、電動、液壓 3. 按轉舵機構分 往復、轉葉
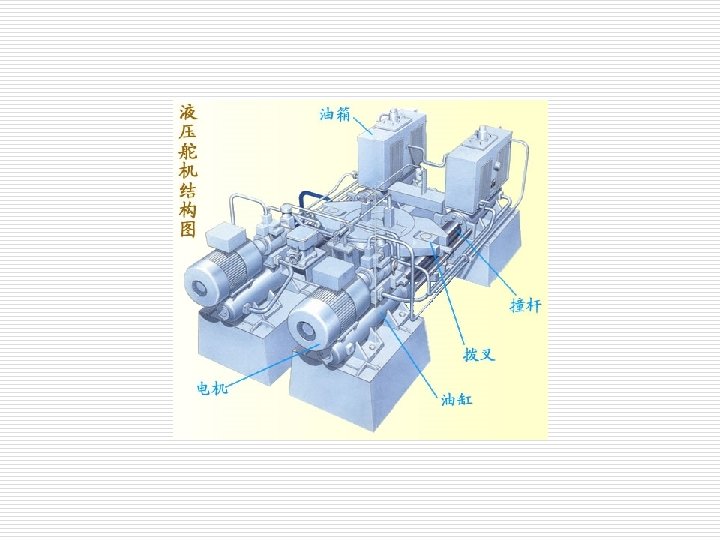
 定向定量泵式(換向閥式) 組成: 1. 操縱系統-轉遞操舵信號 2. 控制元件-控制油液的流向、流量和壓力 3. 轉舵機構-將油液的壓力能轉變為機械能 4.")
第二節 液壓舵機的 作原理和基本組成 分類: 變向變數泵式(變向泵式) 定向定量泵式(換向閥式) 組成: 1. 操縱系統-轉遞操舵信號 2. 控制元件-控制油液的流向、流量和壓力 3. 轉舵機構-將油液的壓力能轉變為機械能 4. 動力源-提供一定壓力和流量的油液

液壓舵機組成框圖 變向泵式 發 送 器 變 向 變 量 泵 受 動 器 遠端操控 机構 換向閥式 操 縱 閥 四 口 三 位 閥 副油泵 轉 舵 机 構 舵 葉 反饋机構 控 制 油 缸 式 液换 動向 閥 轉 舵 機 構 手 、 主油泵 舵 葉

一、泵控型液壓舵機 受動器 回饋機構 變向泵 轉舵機構 防浪閥 舵柱 儲能彈簧

第三節 液壓舵機的轉舵機構 分類: 1. 往復式轉舵機構 2. 回轉式轉舵機構


滑式轉舵機構")
1. 往復式轉舵機構 1)滑式轉舵機構
扭矩特性良好,承載能力較大; 2)撞杆與油缸的密封採用V字型,密封可靠,具有 自動補償能力; 3)油缸精加 面少; 4)尺寸、重量大; 5)安裝、檢修比較麻煩")
滑式轉舵機構特點 1)扭矩特性良好,承載能力較大; 2)撞杆與油缸的密封採用V字型,密封可靠,具有 自動補償能力; 3)油缸精加 面少; 4)尺寸、重量大; 5)安裝、檢修比較麻煩

• 資料表明,當往復式舵機最大 作油壓由 10 MPa提高 到 20 MPa時,往復式舵機的長度大約縮短 5%~ 10%, 重量約可減輕 20%,並使 作油液的使用量減少l/ 2左右。 • 但是,上述各項指標並非隨油壓的進一步提高按線性 關係減小,當油壓從 20 MPa提高到 30 MPa時,往復式舵 機的長度幾乎不變,重量只減輕 6%~ 9%,而 作油液的 使用量也僅減少 16%,~ 18%。 • 此外,進一步提高 作油壓,還將對液壓設備的生產 和管理水準提出更高的要求,故目前液壓舵機的最大 作 油壓,多不超過20 MPa。

採用V字型密封
滾輪式轉舵機構(叉式)")
2)滾輪式轉舵機構(叉式)
擺缸式轉舵機構")
3)擺缸式轉舵機構

2. 回轉式轉舵機構 AEG型轉葉舵機油缸


第四節 液壓舵機的遙控系統 1. 伺服油缸式舵機遙控系統 2. 交流伺服電機式舵機遙控系統
將駕駛台發出的信號轉到舵機室; 2)將信號轉換成伺服油缸活塞的位移( 通過追隨機構控制主油泵的變速機構,實 現遠距離操舵)。")
1. 伺服油缸式舵機遙控系統 由電氣遙控和液壓伺服兩部分組成: 1)將駕駛台發出的信號轉到舵機室; 2)將信號轉換成伺服油缸活塞的位移( 通過追隨機構控制主油泵的變速機構,實 現遠距離操舵)。

第六節 液壓舵機的管理 一、舵機補充油和調試 三、舵機常見故障 1. 系統的清洗和補充油 1. 舵不能轉動 2. 舵機的試驗和調試 2. 只能單向轉舵 3. 安全閥的整定 3. 轉舵時間打不到規定要求 二、舵機管理注意事項 4. 舵機有異常聲音和振動 1. 油位、油溫、油壓 5. 舵不准 2. 濾器、潤滑 3. 洩漏、噪音 4. 機械過熱 5. 聯軸節、閥和固定螺帽
也可能是其中的機械傳動部分有故障(例如導杆卡阻或應插的插銷未插好等)。 如果控制系統具有伺服油缸,還可能是控制油源中斷(例如輔泵損壞等)、 伺服油缸旁通閥未關、溢流閥開啟壓力太低或換向閥不能離開中位等。 2. 主泵不能供油--可換用備用泵加以驗證。 如果是泵變數機構卡住,而兩台主泵又是共用一套浮動杠杆機構,須先將壞泵 的變數機構脫開,才能換用備用油泵。 如果油泵機組不能起動,應查明是否有電路故障,此時應注意有的裝置有連鎖 保護--輔泵未起動則主泵即無法起動,還可用盤車的方法判斷油泵是否有機械")
舵不能轉動 l. 遙控系統失靈--此時機旁操縱正常。 對電氣遙控系統,可能是電路斷路(保險絲燒斷,接點脫焊或接觸不良,電氣 元件損壞等)也可能是其中的機械傳動部分有故障(例如導杆卡阻或應插的插銷未插好等)。 如果控制系統具有伺服油缸,還可能是控制油源中斷(例如輔泵損壞等)、 伺服油缸旁通閥未關、溢流閥開啟壓力太低或換向閥不能離開中位等。 2. 主泵不能供油--可換用備用泵加以驗證。 如果是泵變數機構卡住,而兩台主泵又是共用一套浮動杠杆機構,須先將壞泵 的變數機構脫開,才能換用備用油泵。 如果油泵機組不能起動,應查明是否有電路故障,此時應注意有的裝置有連鎖 保護--輔泵未起動則主泵即無法起動,還可用盤車的方法判斷油泵是否有機械 性卡阻。 如果油泵能運轉但幾乎沒有油壓,則在排除主油路旁通或洩漏的可能性後,即 表明主泵沒有供油,對閥控型開式系統,可先檢查迴圈油櫃是否缺油,或吸 入管是 否堵塞;對泵控型舵機,則應以機旁操縱方法,檢查泵的變數機構能 否正常移動。變數機構卡住,差動活塞控制油中斷或油路堵塞,浮動杆機構 銷子斷落或儲能彈簧 太軟,則機旁操作也會無法使油泵離開中位,必要時可 拆檢泵的變數機構或泵本身,以判明 作部件是否損壞。 3. 主油路旁通或嚴重洩漏--此時主泵吸、排油壓相近。 主油路旁通可能是因備用泵鎖閉不嚴(反轉)、旁通閥開啟、安全閥開啟壓力 過低或被墊起,閥控型系統則也可能是因換向閥有故障不能離開中位元所造 成。 4. 主油路不通或舵轉動受阻--表現為主泵排出油壓高,安全閥開啟。 主油路不通的最大可能往往是泵閥、缸閥未開或主油路的液控鎖閉閥打不開。
或控 制用伺服油缸一側嚴重洩漏等造成。 2. 變數泵只能單向排油--如果換用備用泵則可正常 作。 這往往是泵變數機構單向運行發生困難,例如單向卡阻或差動活塞 某一油孔堵塞等。 3. 主油路單方向不通或旁通。")
只能單向轉舵 1. 遙控系統只能單向動作--如果改用機旁手動操舵則正常。 這可能是電氣遙控線路故障(例如電磁換向閥一端線圈斷路)或控 制用伺服油缸一側嚴重洩漏等造成。 2. 變數泵只能單向排油--如果換用備用泵則可正常 作。 這往往是泵變數機構單向運行發生困難,例如單向卡阻或差動活塞 某一油孔堵塞等。 3. 主油路單方向不通或旁通。 可能是某側的安全閥開啟壓力過低、或主油路鎖閉閥之一在回油時 不能開啟。

轉舵時間達不到規定要求 1. 主泵流量太小 如非選配不當,則多數是因磨損過度造成泵內洩漏嚴重,或者是泵 局部損壞所致,有時也可能是變數機構行程太短或泵轉速達不到額 定值的緣故。 2. 遙控系統動作太慢--改用機旁操舵後轉舵時間即可符合要求。 作正常時,浮動杆的操縱點A從一舷滿舵位置移到另一舷滿舵位 置所需時間應在 22 S~ 24 S。如果上述時間明顯增加,對伺服電機 式遙控系統,可能是電 路有故障、激磁電流不足或回饋信號太強; 對伺服油缸式,則可能是提供控制油的輔泵流量不足或調速閥調定 的流量太小,此外,也可能是伺服油缸油路洩漏嚴重等 造成。 3. 主油路有旁通或洩漏。 這往往同時會引起沖舵、跑舵或滯舵。除外部洩漏外,可能是安全 閥、旁通閥等關閉不嚴,或雙作用油缸、轉葉油缸內部密封損壞, 或備用泵油路鎖閉不嚴,或主油路換向閥洩漏嚴重等。

滯舵--舵葉的轉動滯後於操舵動作 1. 主油路中混有較多氣體--這時即使機旁操舵,滯舵現象也不會消除, 且轉舵時可從高壓側放氣閥 放出氣體。原因可能是充液或檢修後放 氣不夠徹底,也可能是 作油箱油位太低或補油壓力太低。對閉式 系統,如系統有洩漏,則撞杆位移就不足以填補低壓側油缸 中被吸 走的油液容積,以致使泵吸入側壓力太低而吸入空氣。 2. 遙控系統動作遲滯。例如伺服油缸或控制油路中存有氣體、控制系 統機械傳動部件的間隙太大等。 3. 泵控型系統主油路洩漏或旁通嚴重。在這種情況下,由於油泵在剛 離開中位流量較小時,舵便可能不動或動得很慢。
。這時,在舵轉動後,由於受 到浮動杆傳來的作用力,伺服活塞就會在到達指令舵角後因油路鎖閉不 住而繼續前移,於是油泵便無法回到零位,舵也就會繼續沖轉。 以上幾種情況舵將一直沖到頂住機械舵角限位器為止。 4.")
沖舵--舵轉到指令舵角後沖轉過頭 1. 泵變數機構不能及時或不能回中。這可能是變數機構卡住,控制油壓變低 或差動活塞油孔堵塞等所造成。 2. 遙控伺服油缸的換向閥或閥控型系統主油路的換向閥不能回中。這可能是 閥芯在一端卡住,也可能是一端彈簧斷裂,張力不足等。 3. 遙控伺服油路閉鎖不嚴(油路洩漏或旁通)。這時,在舵轉動後,由於受 到浮動杆傳來的作用力,伺服活塞就會在到達指令舵角後因油路鎖閉不 住而繼續前移,於是油泵便無法回到零位,舵也就會繼續沖轉。 以上幾種情況舵將一直沖到頂住機械舵角限位器為止。 4. 控制系統的回饋部分有故障。例如回饋系統的機械連接件鬆動、電氣元件 損壞、觸頭髒汙或斷路等。 5. 主油路鎖閉不嚴。舵轉到指令舵角時,如果控制系統 作正常,則轉舵油 缸停止就會進油,假如主油路存在洩漏或旁通,則在舵轉動慣性大,特 別是舵作用有負扭矩時,就會發生沖舵。但如果回饋機構正常,舵沖過 指令舵角後仍會回到指令舵角。

跑舵--穩舵期間舵偏離所停舵角 這多半是因為主油路鎖閉不嚴或遙控系統 作不穩定所致;此外, 兩台泵共用一套浮動杆控制的變數泵中位元調節不一致或調好後 鬆動,在雙泵同時 作時也會產生舵停不穩的現象。

舵機有異常雜訊和振動 1. 液體雜訊。 作油液中產生氣穴所引起。可能是閉式系統放 氣不徹底或補油不足;也可能是開式系統油箱中的油位元太 低,吸油濾器堵塞或吸油管漏氣;此外當油溫太低、油粘度 太大時,也可能產生液體噪音。 2. 油泵機組異常雜訊。可能是泵和電動機對中不良,軸承或泵 內其它運動部件損壞。 3. 管路或其它部件固定不牢。 4. 轉舵油缸柱塞填料過緊。 5. 某些型式的主油路鎖閉閥在舵受負扭矩作用而轉動較快時, 也易產生敲擊。 6. 舵杆軸承磨損或潤滑不良。 7.舵不准--轉舵停止時實際舵角與指令舵角誤差超過± 1°。 調整方法參見“舵機的試驗和調整”。

舵機的日常管理主要注意以下幾個方面: 1.油位 2.油溫 3.油壓 4.濾器 5.潤滑 6.洩漏 7.噪音 8.機械過熱 9.聯軸節 10.閥和固定螺帽

End
7cadade5a121407f14bba851f6eb8272.ppt